






 industry
industrySimilar presentations:










Модернизация механизма передвижения мостового крана грузоподъемностью 10 т
1.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПРОМЫШЛЕННЫХ ТЕХНОЛОГИЙ И ДИЗАЙНА»
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА НА ТЕМУ:
МОДЕРНИЗАЦИЯ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ МОСТОВОГО КРАНА
ГРУЗОПОДЪЕМНОСТЬЮ 10 Т
САНКТ-ПЕТЕРБУРГ, 2022
2.
ЦЕЛИ И ЗАДАЧИ1 ПРОВСЕТИ АНАЛИЗ ВАРАИНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙ МОЕДРНИЗАЦИИ
ЭЛЕКТРОПРИВОДА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ КРАНА,
2 ПРОИЗВЕСТИ РАСЧЕТ МОЩНОСТИ И ВЫБОР ПРИВОДНОГО ЭЛЕКТРОДВИГАТЕЛЯ.
3 ДЛЯ ВЫБРАННОЙ СИСТЕМЫ ЭЛЕКТРОПРИВОДА ПРОИЗВЕСТИ ВЫБОР ЭЛЕМЕНТОВ
СИСТЕМЫ УПРАВЛЕНИЯ.
4 ПРОИЗВЕСТИ РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА.
5 ПРОИЗВЕСТИ АНАЛИЗ ПЕРЕХОДНЫХ ПРОЦЕССОВ ДЛЯ ВЫБРАНООЙ СИСТЕМЫ
ЭЛЕКТРОПРИВОДА,
3.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙКРАНОВОЕ ОБОРУДОВАНИЕ ЯВЛЯЕТСЯ ОДНИМ ИЗ ОСНОВНЫХ СРЕДСТВ
КОМПЛЕКСНОЙ МЕХАНИЗАЦИИ ВСЕХ ОТРАСЛЕЙ НАРОДНОГО ХОЗЯЙСТВА.
РАСШИРЕНИЕ ОТРАСЛИ МАШИНОСТРОЕНИЯ, ЗАНИМАЮЩЕЙСЯ ПРОИЗВОДСТВОМ
ГРУЗОПОДЪЕМНЫХ МАШИН, ЯВЛЯЕТСЯ ВАЖНЫМ НАПРАВЛЕНИЕМ РАЗВИТИЯ
НАРОДНОГО ХОЗЯЙСТВА ДЛЯ РЕШЕНИЯ ЗАДАЧИ ВСЕМЕРНОГО СОКРАЩЕНИЯ И
ЛИКВИДАЦИИ ТЯЖЕЛОГО РУЧНОГО ТРУДА.
АКТУАЛЬНОСТЬ РАССМОТРЕНИЯ ВОПРОСА МОДЕРНИЗАЦИИ ЭЛЕКТРОПРИВОДА
КРАНОВОГО МЕХАНИЗМА ОБУСЛОВЛЕНА ШИРОКИМ РАСПРОСТРАНЕНИЕМ
КРАНОВЫХ МЕХАНИЗМОВ В ПРОМЫШЛЕННОСТИ.
4.
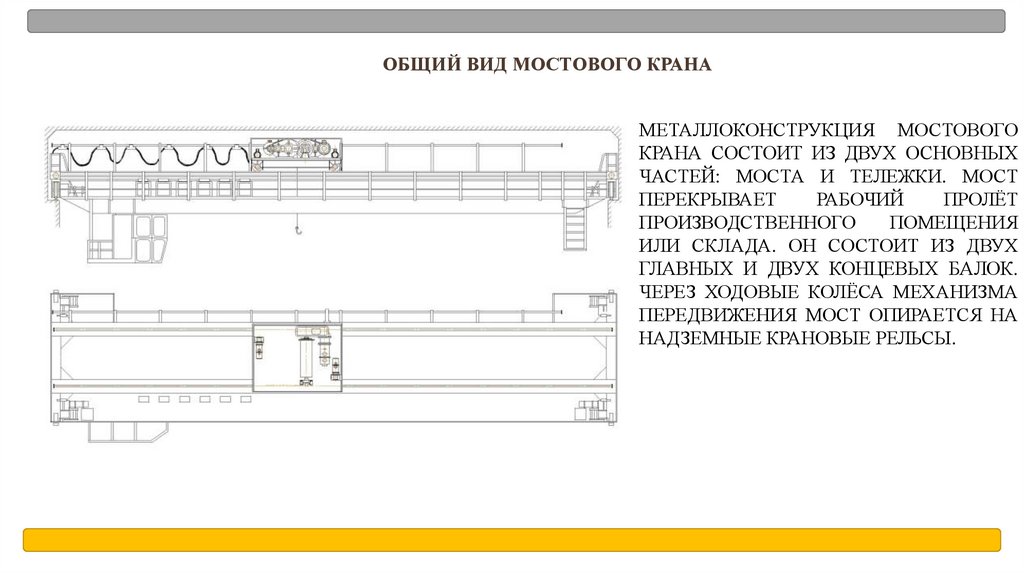
ОБЩИЙ ВИД МОСТОВОГО КРАНАМЕТАЛЛОКОНСТРУКЦИЯ МОСТОВОГО
КРАНА СОСТОИТ ИЗ ДВУХ ОСНОВНЫХ
ЧАСТЕЙ: МОСТА И ТЕЛЕЖКИ. МОСТ
ПЕРЕКРЫВАЕТ
РАБОЧИЙ
ПРОЛЁТ
ПРОИЗВОДСТВЕННОГО
ПОМЕЩЕНИЯ
ИЛИ СКЛАДА. ОН СОСТОИТ ИЗ ДВУХ
ГЛАВНЫХ И ДВУХ КОНЦЕВЫХ БАЛОК.
ЧЕРЕЗ ХОДОВЫЕ КОЛЁСА МЕХАНИЗМА
ПЕРЕДВИЖЕНИЯ МОСТ ОПИРАЕТСЯ НА
НАДЗЕМНЫЕ КРАНОВЫЕ РЕЛЬСЫ.
5.
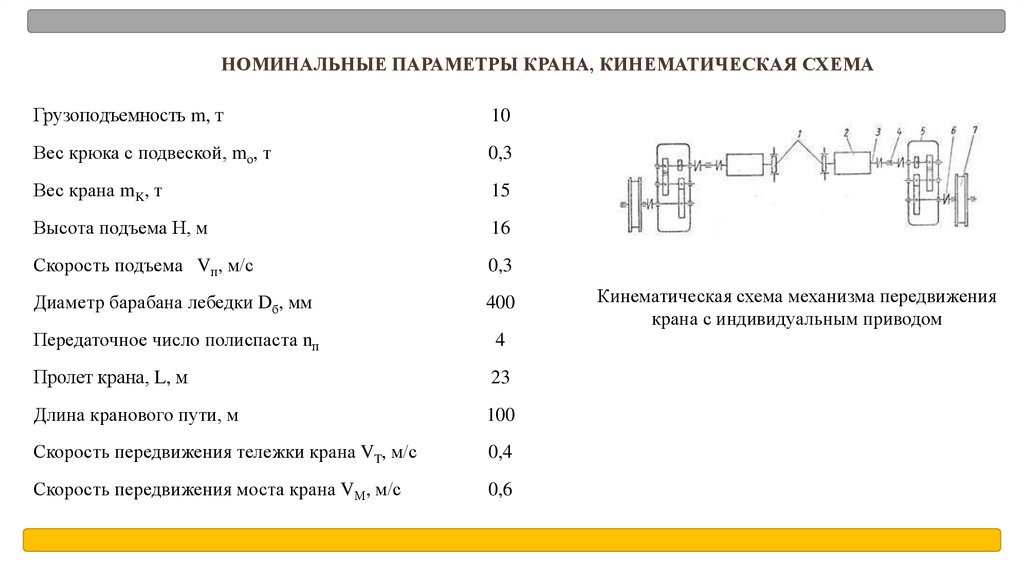
НОМИНАЛЬНЫЕ ПАРАМЕТРЫ КРАНА, КИНЕМАТИЧЕСКАЯ СХЕМАГрузоподъемность m, т
10
Вес крюка с подвеской, mо, т
0,3
Вес крана mK, т
15
Высота подъема Н, м
16
Скорость подъема Vп, м/с
0,3
Диаметр барабана лебедки Dб, мм
400
Передаточное число полиспаста nп
4
Пролет крана, L, м
23
Длина кранового пути, м
100
Скорость передвижения тележки крана VT, м/с
0,4
Скорость передвижения моста крана VМ, м/с
0,6
Кинематическая схема механизма передвижения
крана с индивидуальным приводом
6.
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ЭЛЕКТРОПРИВОДУ И СХЕМЕ УПРАВЛЕНИЯ- НАЛИЧИЕ РЕВЕРСИРОВАНИЯ ПРИВОДА;
- ВОЗМОЖНОСТЬ РЕГУЛИРОВАНИЕ УГЛОВОЙ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ В
ДИАПАЗОНЕ НЕ МЕНЕЕ 4:1;
- ВЫСОКАЯ ЖЕСТКОСТЬ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ;
- ОБЕСПЕЧЕНИЕ ДОСТАТОЧНОГО ПУСКОВОГО МОМЕНТА ДЛЯ ПОДЪЕМА МАКСИМАЛЬНОГО
ГРУЗА И ПЕРЕГРУЗОЧНОЙ СПОСОБНОСТИ ДВИГАТЕЛЯ.
7.
АНАЛИЗ ВАРИАНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙВ КАЧЕСТВЕ ХАРАКТЕРИСТИК ДЛЯ СРАВНЕНИЯ
ВЫБРАННЫХ ВАРИАНТОВ БУДЕМ РАССМАТРИВАТЬ
СЛЕДУЮЩИЕ:
- СТОИМОСТЬ;
- РАСХОД ЭНЕРГИИ ЗА ЦИКЛ;
- ЭКСПЛУАТАЦИОННЫЕ РАСХОДЫ;
- КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ (КПД);
- НАДЕЖНОСТЬ.
Характеристики
системы
Стоимость
Расход
энергии
за цикл
Эксплуатационные
расходы
КПД
Надежность
Весовые
коэффициенты
5
5
4
4
5
АДФР с реостатным
регулированием
5
3
4
3
4
S АДФР .РР 5 5 5 3 4 4 4 3 5 4 88
АДФР с импульсным
регулированием
3
4
4
4
4
S АДФР.ИР 5 3 5 4 4 4 4 4 5 4 87
АДКЗ с частотным
регулированием
4
4
4
4
5
S АДКЗ 5 4 5 4 4 4 4 4 5 5 97
8.
ПАРАМЕТРЫ ЭЛЕКТРОДВИГАТЕЛЯ И ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫТИП ЭЛЕКТРОДВИГАТЕЛЯ
МОЩНОСТЬ НОМИНАЛЬНАЯ
НОМИНАЛЬНАЯ СКОРОСТЬ ВРАЩЕНИЯ:
НОМИНАЛЬНОЕ НАПРЯЖЕНИЕ:
ТОК СТАТОРА:
КПД
КОЭФФИЦИЕНТ МОЩНОСТИ
НОМИНАЛЬНЫЙ МОМЕНТ
МАКСИМАЛЬНЫЙ ВРАЩАЮЩИЙ МОМЕНТ
МОМЕНТ ИНЕРЦИИ РОТОРА ДВИГАТЕЛЯ:
ПРОДОЛЖИТЕЛЬНОСТЬ ВКЛЮЧЕНИЯ:
АМТК112МА6
РН=3 КВТ
NН =955 ОБ/МИН
UН = 380 В
I1НОМ =7,2 А,
ηН = 81%,
COSΦ=0,7
МН=30 Н∙
ММАХ=84 Н∙
J =0,0076 КГ∙М2
ПВ=100%.
ТИП ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ
МОЩНОСТЬ, КВТ
ЛИНЕЙНЫЙ ТОК, А
ДИАПАЗОН ВЫХОДНОЙ ЧАСТОТЫ, ГЦ
НОМИНАЛЬНАЯ ЧАСТОТА КОММУТАЦИИ, КГЦ
ATV340U30N4E
3
8,6
ОТ 0 ДО 1600
10
9.
НАГРУЗОЧНАЯ ДИАГРАММА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ КРАНА80
60
40
М, Н·м
20
0
0
50
100
150
200
-20
-40
-60
t, c
250
300
350
400
10.
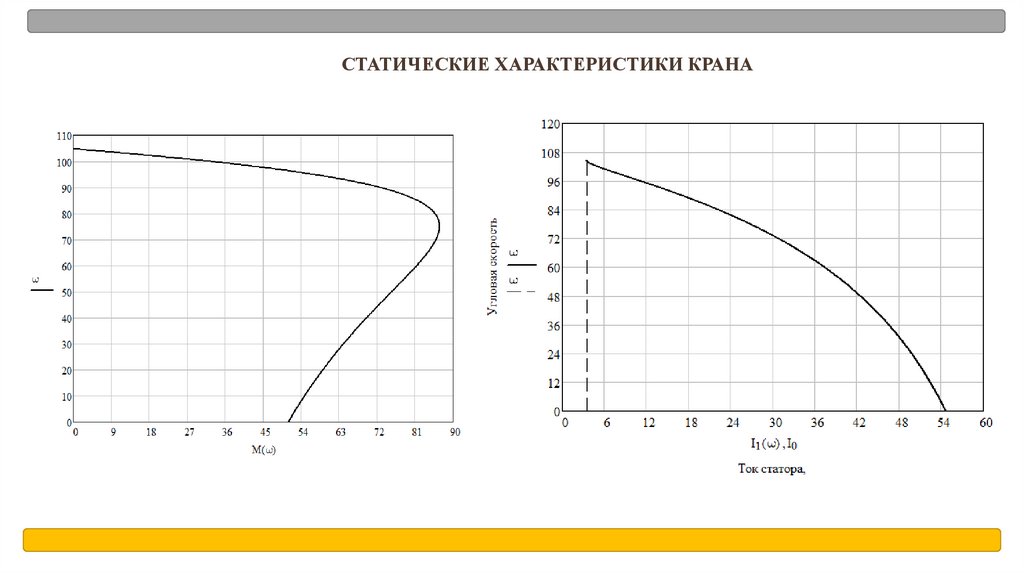
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРАНА11.
СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПРИОРИЕНТАЦИИ ВРАЩАЮЩЕЙСЯ СИСТЕМЫ КООРДИНАТ ПО ВЕКТОРУ
ПОТОКОСЦЕПЛЕНИЯ РОТОРА
12.
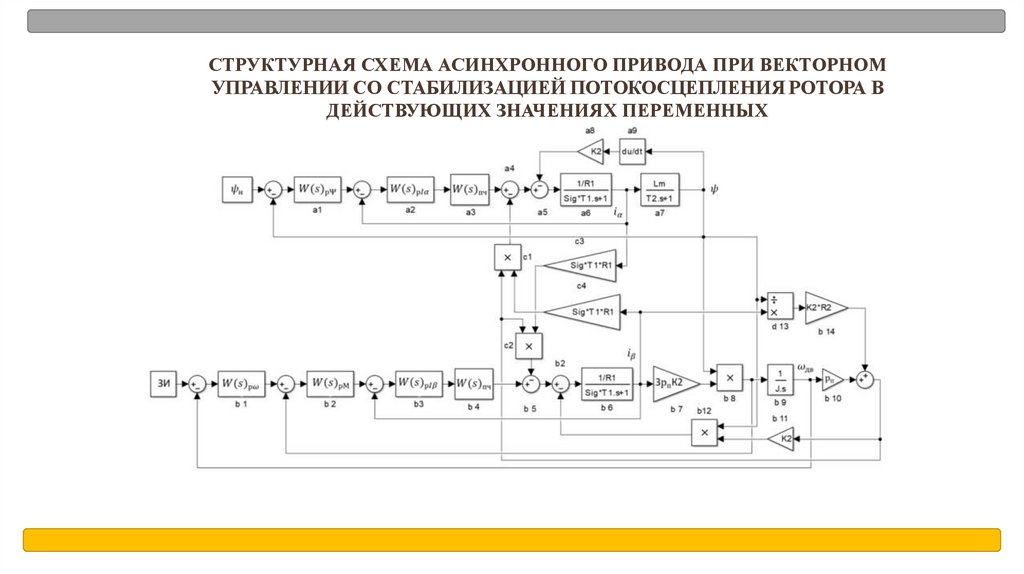
СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ПРИВОДА ПРИ ВЕКТОРНОМУПРАВЛЕНИИ СО СТАБИЛИЗАЦИЕЙ ПОТОКОСЦЕПЛЕНИЯ РОТОРА В
ДЕЙСТВУЮЩИХ ЗНАЧЕНИЯХ ПЕРЕМЕННЫХ
13.
КОНТУР ТОКАСтруктурная схема контура тока
Переходная характеристика контура тока
14.
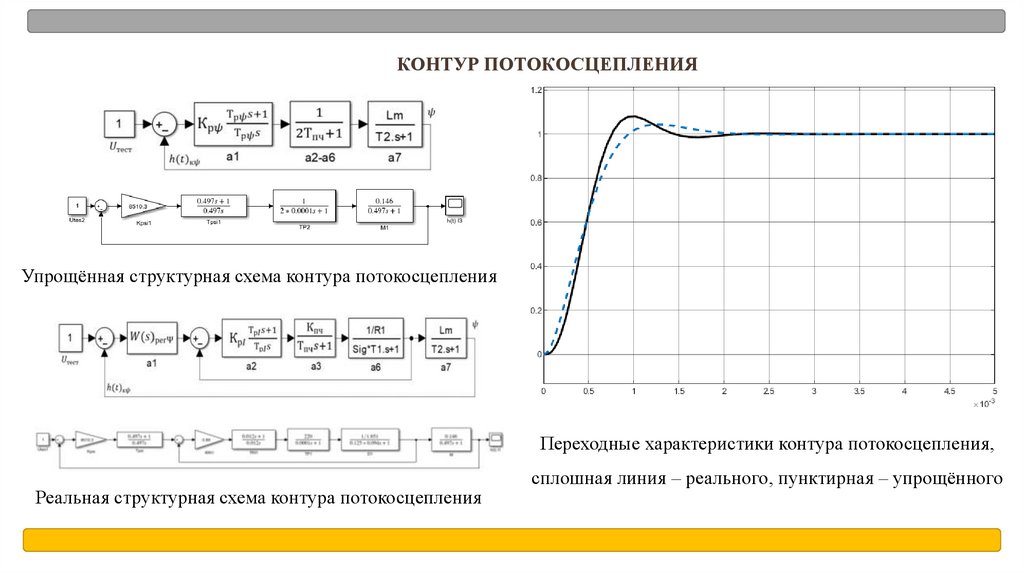
КОНТУР ПОТОКОСЦЕПЛЕНИЯУпрощённая структурная схема контура потокосцепления
Переходные характеристики контура потокосцепления,
Реальная структурная схема контура потокосцепления
сплошная линия – реального, пунктирная – упрощённого
15.
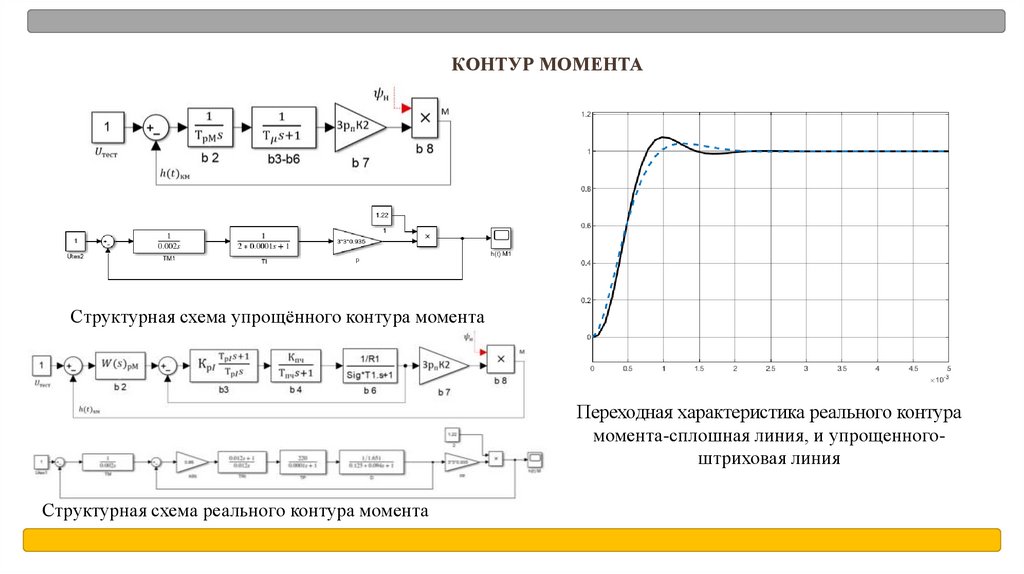
КОНТУР МОМЕНТАСтруктурная схема упрощённого контура момента
Переходная характеристика реального контура
момента-сплошная линия, и упрощенногоштриховая линия
Структурная схема реального контура момента
16.
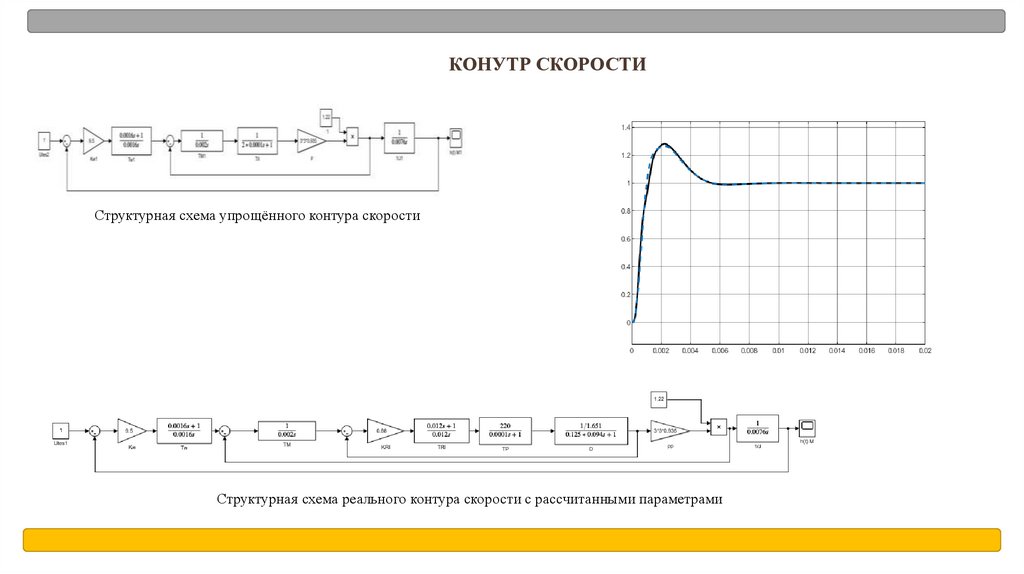
КОНУТР СКОРОСТИСтруктурная схема упрощённого контура скорости
Структурная схема реального контура скорости с рассчитанными параметрами
17.
САУ ЭЛЕКТРОПРИВОДА18.
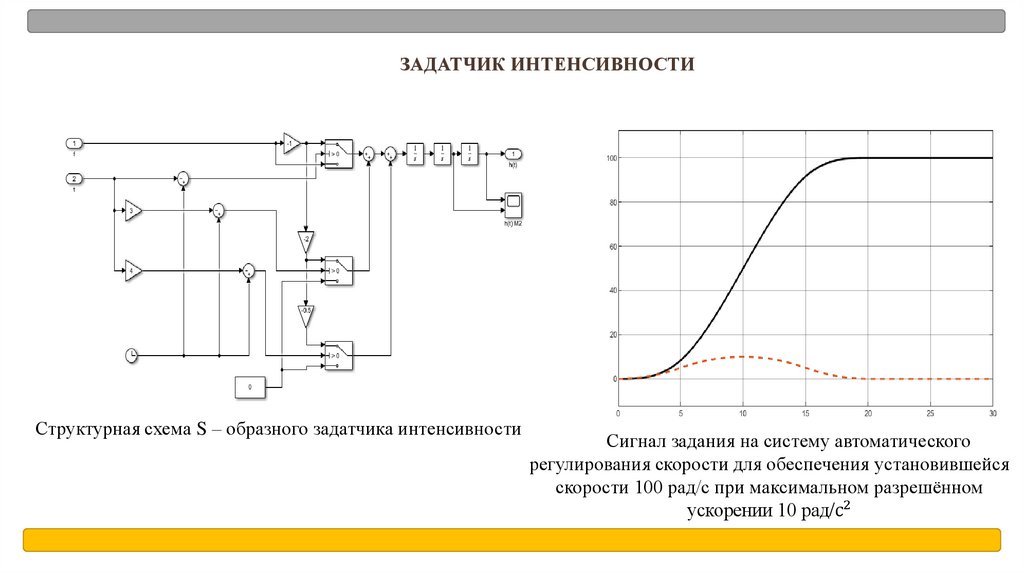
ЗАДАТЧИК ИНТЕНСИВНОСТИСтруктурная схема S – образного задатчика интенсивности
Сигнал задания на систему автоматического
регулирования скорости для обеспечения установившейся
скорости 100 рад/с при максимальном разрешённом
ускорении 10 рад/с2
19.
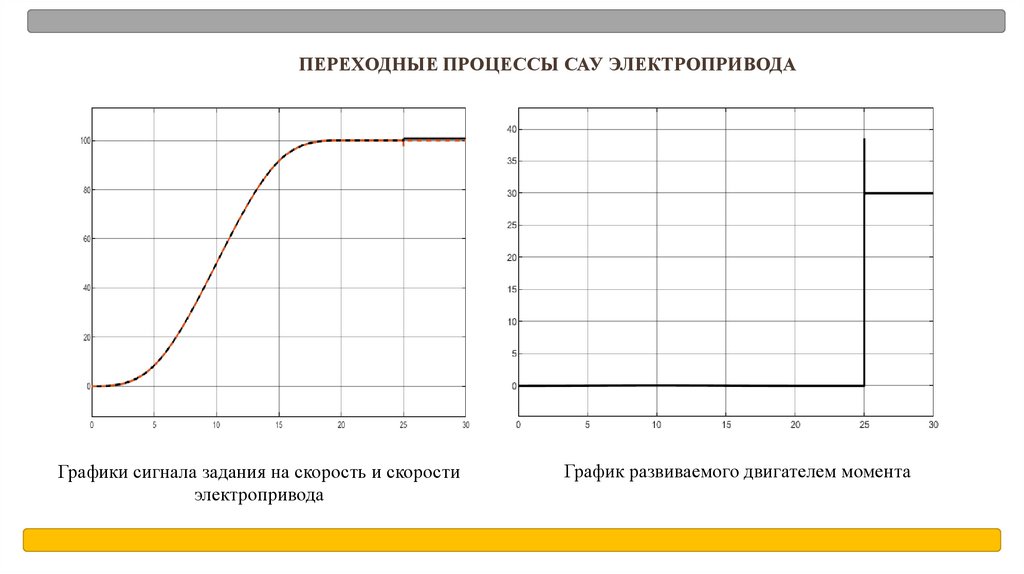
ПЕРЕХОДНЫЕ ПРОЦЕССЫ САУ ЭЛЕКТРОПРИВОДАГрафики сигнала задания на скорость и скорости
электропривода
График развиваемого двигателем момента