

















 industry
industrySimilar presentations:










Эл. привод механизма перемещения тележки мостового крана грузоподъемностью 25т
1.
Государственное профессиональное образовательное учреждение«Юргинский техникум машиностроения и информационных технологий»
ЭЛ.ПРИВОД МЕХАНИЗМА
ПЕРЕМЕЩЕНИЯ ТЕЛЕЖКИ
МОСТОВОГО КРАНА
ГРУЗОПОДЪЕМНОСТЬЮ 25т
Курсовой проект
КП.13.02.11.24.04 ПЗ
Выполнил студент
группы ЭО-21
Борисенко Н.С
Проверил:
Худякова С.И
г.Юрга 2024
2.
ВведениеЦелью данного курсового проекта является проектирование электрического привода
механизма перемещения тележки мостового крана грузоподъемностью 25 тонн. В процессе работы
решены следующие задачи:
1. Проведен расчет и выбор параметров электрического привода с учетом требований к
грузоподъемным механизмам.
2. Рассчитаны и построены механические характеристики, отражающие работу привода в
различных режимах.
3. Выполнены расчеты и произведен выбор аппаратов защиты для обеспечения надежной и
безопасной эксплуатации оборудования.
3.
Общая частьНазначение, конструкция, кинематическая схема
механизма
4.
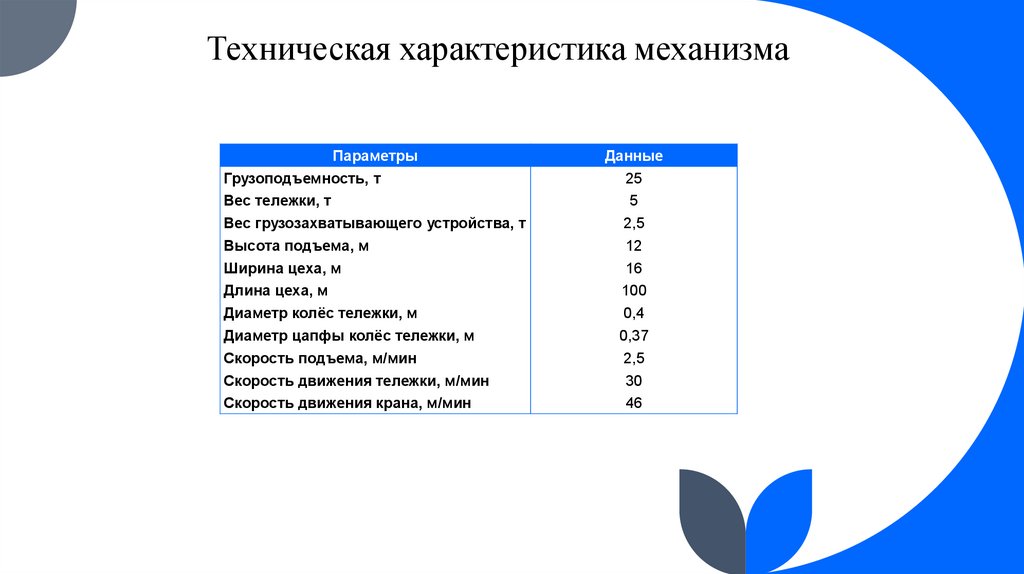
Техническая характеристика механизмаПараметры
Грузоподъемность, т
Вес тележки, т
Вес грузозахватывающего устройства, т
Высота подъема, м
Ширина цеха, м
Длина цеха, м
Диаметр колёс тележки, м
Диаметр цапфы колёс тележки, м
Скорость подъема, м/мин
Скорость движения тележки, м/мин
Скорость движения крана, м/мин
Данные
25
5
2,5
12
16
100
0,4
0,37
2,5
30
46
5.
Условия, режим работы электропривода.Требования к электроприводу
6.
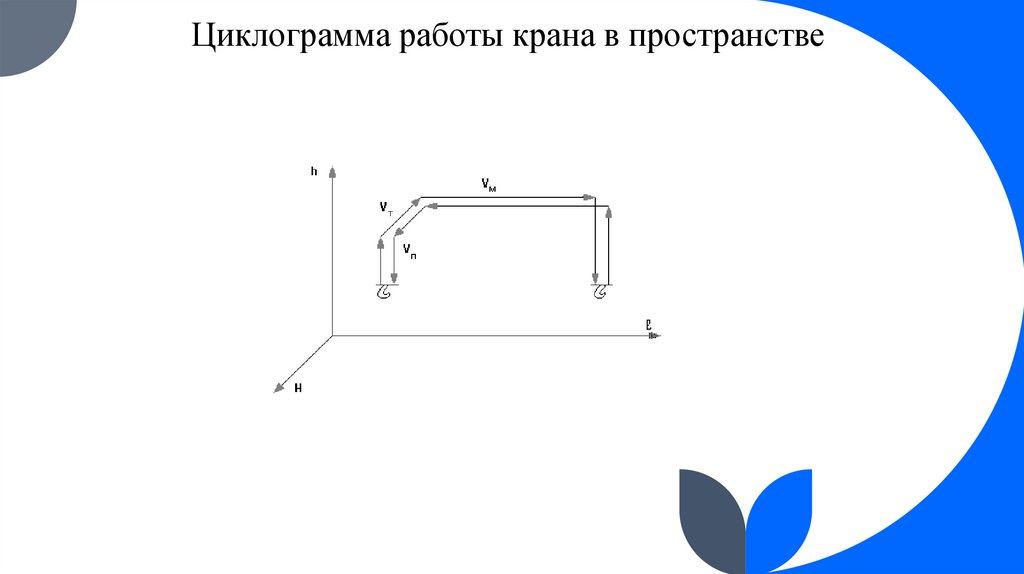
Циклограмма работы крана в пространстве7.
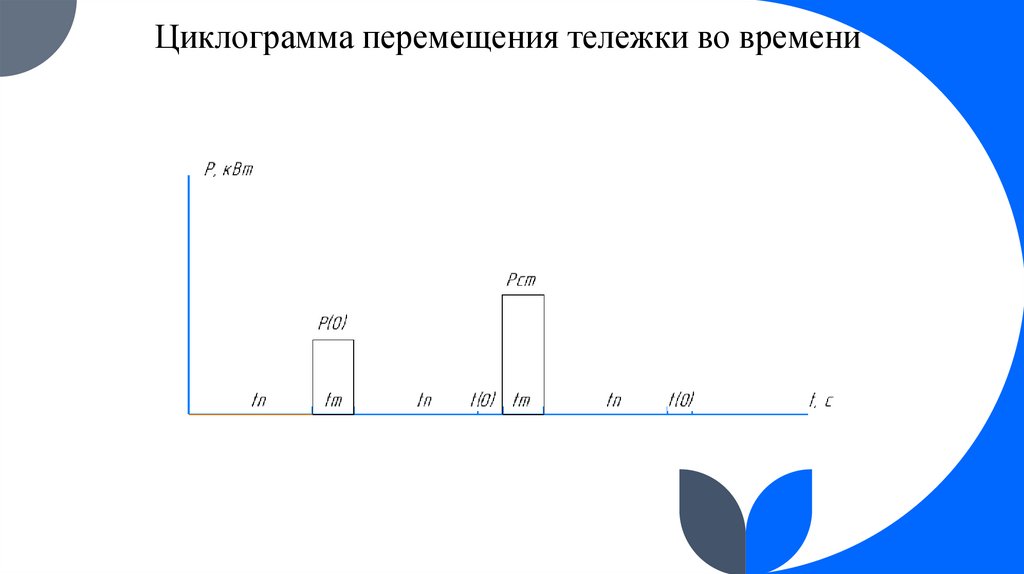
Циклограмма перемещения тележки во времени8.
Выбор параметров электроприводаВыбор рода тока, величины питающего напряжения и
типа двигателя
9.
Расчет мощности двигателя10.
Двигатель для подъема MTF 311-6Данные двигателя:
P = 13,4 кВт;
nном = 945 об/мин;
I1ном, при 380 В = 30,5 А;
cos γном = 0,69;
ηном = 79%;
I2ном = 42 А;
E20 = 172 В;
Mмах = 314 Н·м;
GD2 = 0,80 кг·м2;
nmax = 2500 об/мин.
11.
Двигатель для перемещения MTF 111-6Данные двигателя:
P = 5,4 кВт;
nном = 900 об/мин;
I1ном , при 380 В = 10,8 А;
cos γном = 0,70;
ηном = 70%;
I2ном = 15 А;
E20 = 176 В;
Mмах = 88 Н·м;
GD2 = 0,195 кг·м2;
nмах = 2500 об/мин.
12.
Выбор и обоснование схемы управления13.
Выбор пускорегулировочных сопротивлений14.
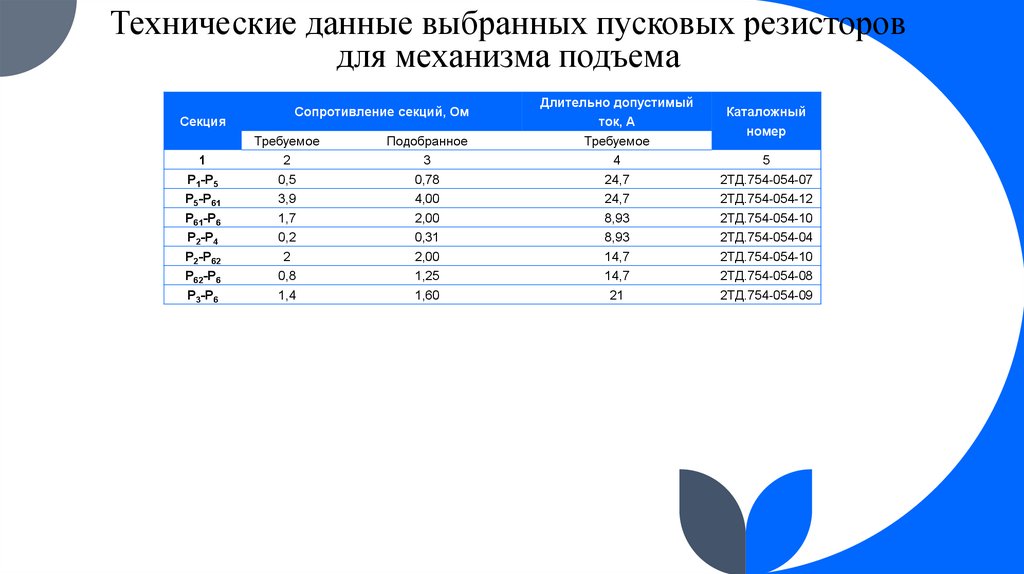
Технические данные выбранных пусковых резисторовдля механизма подъема
1
P1-P5
Требуемое
2
0,5
Подобранное
3
0,78
Длительно допустимый
ток, А
Требуемое
4
24,7
P5-P61
P61-P6
P2-P4
P2-P62
P62-P6
P3-P6
3,9
1,7
0,2
2
0,8
1,4
4,00
2,00
0,31
2,00
1,25
1,60
24,7
8,93
8,93
14,7
14,7
21
Секция
Сопротивление секций, Ом
Каталожный
номер
5
2ТД.754-054-07
2ТД.754-054-12
2ТД.754-054-10
2ТД.754-054-04
2ТД.754-054-10
2ТД.754-054-08
2ТД.754-054-09
15.
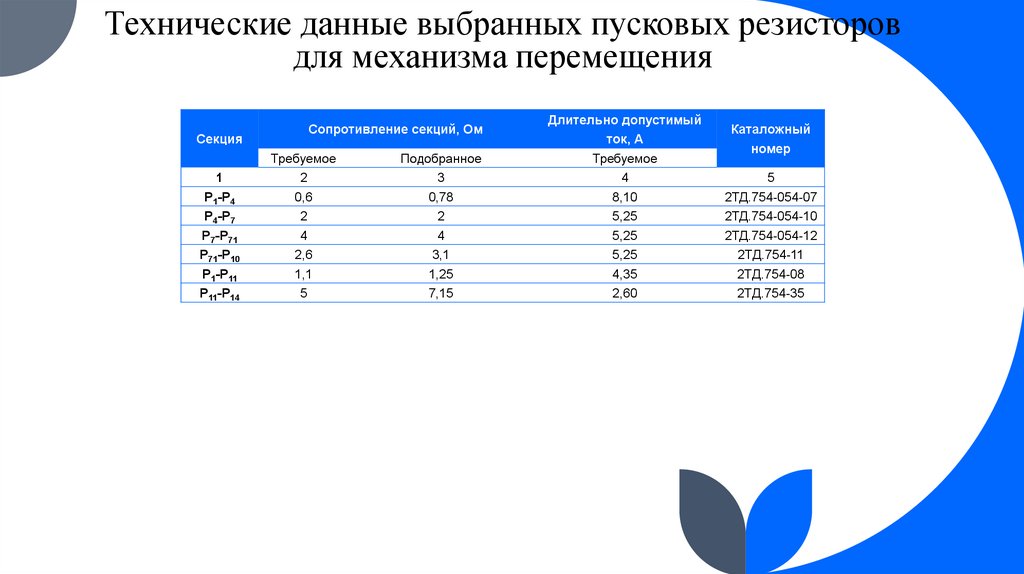
Технические данные выбранных пусковых резисторовдля механизма перемещения
1
P1-P4
Требуемое
2
0,6
Подобранное
3
0,78
Длительно допустимый
ток, А
Требуемое
4
8,10
P4-P7
P7-P71
P71-P10
P1-P11
P11-P14
2
4
2,6
1,1
5
2
4
3,1
1,25
7,15
5,25
5,25
5,25
4,35
2,60
Секция
Сопротивление секций, Ом
Каталожный
номер
5
2ТД.754-054-07
2ТД.754-054-10
2ТД.754-054-12
2ТД.754-11
2ТД.754-08
2ТД.754-35
16.
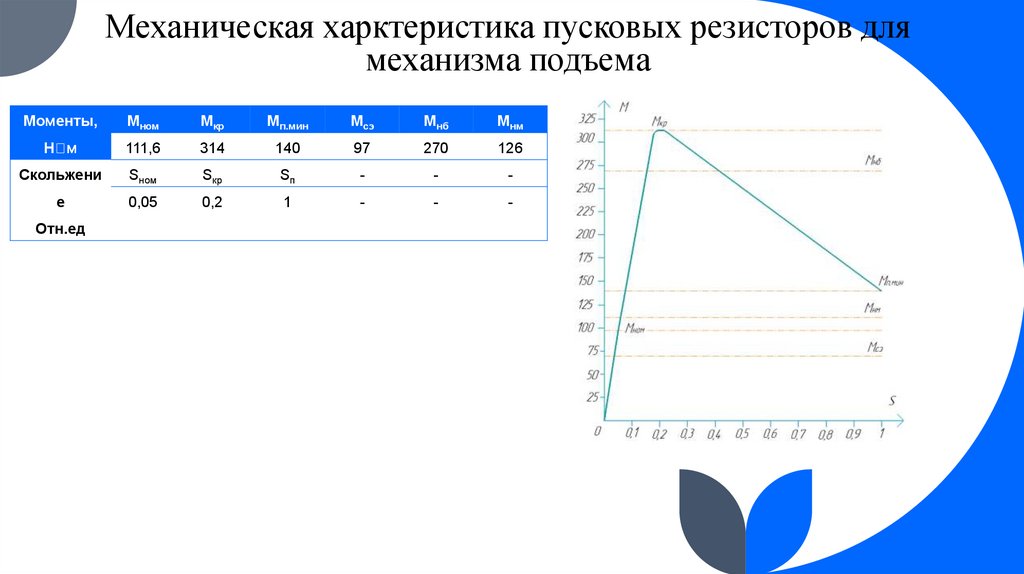
Механическая харктеристика пусковых резисторов длямеханизма подъема
Моменты,
Мном
Мкр
Мп.мин
Мсэ
Мнб
Мнм
Н м
111,6
314
140
97
270
126
Скольжени
Sном
Sкр
Sп
-
-
-
е
0,05
0,2
1
-
-
-
Отн.ед
17.
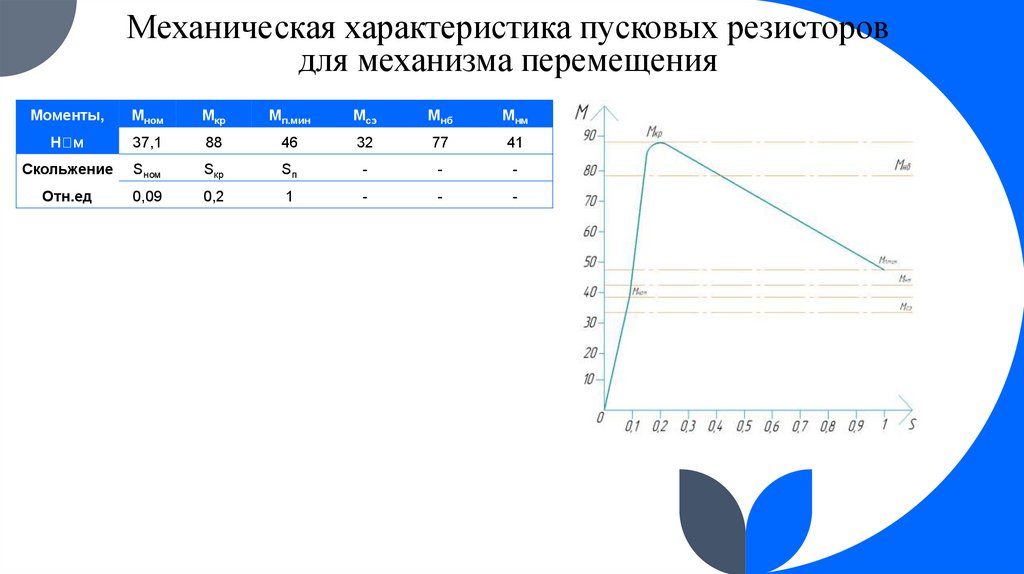
Механическая характеристика пусковых резисторовдля механизма перемещения
Моменты,
Мном
Мкр
Мп.мин
Мсэ
Мнб
Мнм
Н м
37,1
88
46
32
77
41
Скольжение
Sном
Sкр
Sп
-
-
-
Отн.ед
0,09
0,2
1
-
-
-
18.
Расчет и выбор тормозных устройств для подъемаТКП 100
19.
Расчет и выбор тормозных устройств дляперемещения ТКП 200/300
20.
Расчет и выбор аппаратов защитыРЭО 401
21.
Автоматический выключатель токоограничивающий сэлектромагнитным и тепловым расцепителем типа
ВА47-29-63
22.
Предохранитель ПР-223.
Описание работы схемы управления и защитымеханизма ККТ68А
24.
Описание работы схемы управления и защитымеханизма ККТ61А
25.
Техника безопасности при эксплуатацииэлектрооборудования
26.
Охрана труда и противопожарные мероприятия27.
ЗаключениеВ результате выполнения курсового проекта был спроектирован электрический привод механизма перемещения
тележки мостового крана грузоподъемностью 25 тонн. Основные задачи проекта были успешно решены:
1. Рассчитаны и выбраны параметры электрического привода, включая оптимальный электродвигатель,
обеспечивающий надежность и эффективность работы механизма.
2. Построены механические характеристики, подтверждающие соответствие выбранного привода требованиям
точности и плавности перемещения груза.
3. Выполнены расчеты и произведен выбор аппаратов защиты, гарантирующих безопасную эксплуатацию
оборудования и предотвращение аварийных ситуаций.
28.
Схема тележки мостового кранаВид спереди
29.
Схема тележки мостового кранаВид сбоку