

 informatics
informatics software
softwareSimilar presentations:







")


Программно-алгоритмическое обеспечение системы управления мобильным роботом на основе прогнозирующих моделей
1.
МИНОБРНАУКИ РОССИИФедеральное государственное бюджетное образовательное учреждение высшего образования
«МИРЭА – Российский технологический университет»
РТУ МИРЭА
Институт искусственного интеллекта
Кафедра проблем управления
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
На тему: Программно-алгоритмическое обеспечение системы управления мобильным роботом на основе
прогнозирующих моделей
Обучающийся: Буленко Иван Юрьевич
Направление подготовки: 09.03.01 «Информатика и вычислительная техника»
Группа: КВБО-07-21
Руководитель: к.т.н., доцент Ю.А. Быковцев
2. Цель и задачи
Цель: Разработать программно-алгоритмическое обеспечение системы управления мобильным роботом на основепрогнозирующих моделей.
Задачи:
•Провести обзор и анализ подходов к построению алгоритма управления с прогнозирующей моделью.
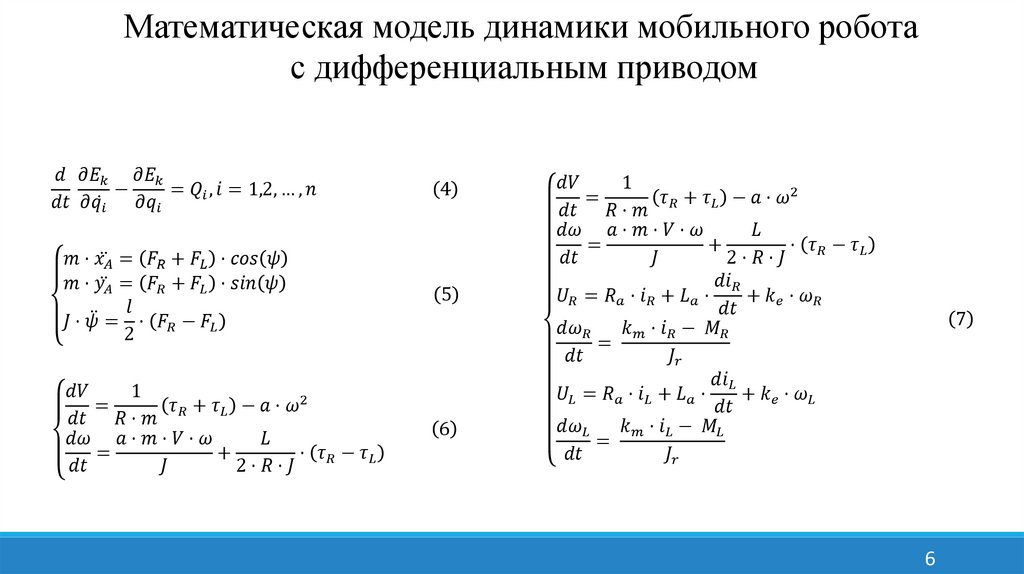
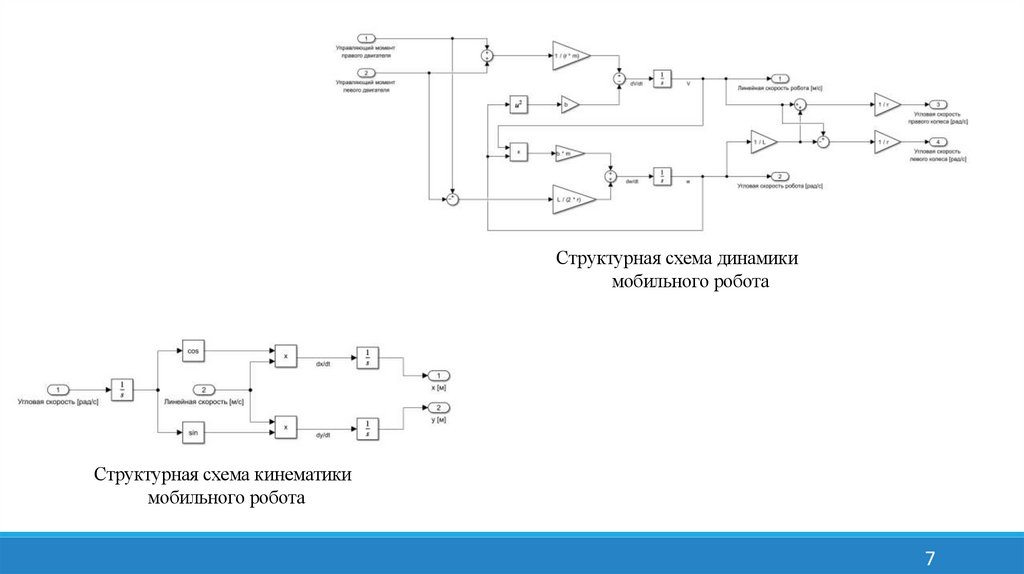
•Разработать математическую модель кинематики и динамики мобильного робота с двумя ведущими колесами.
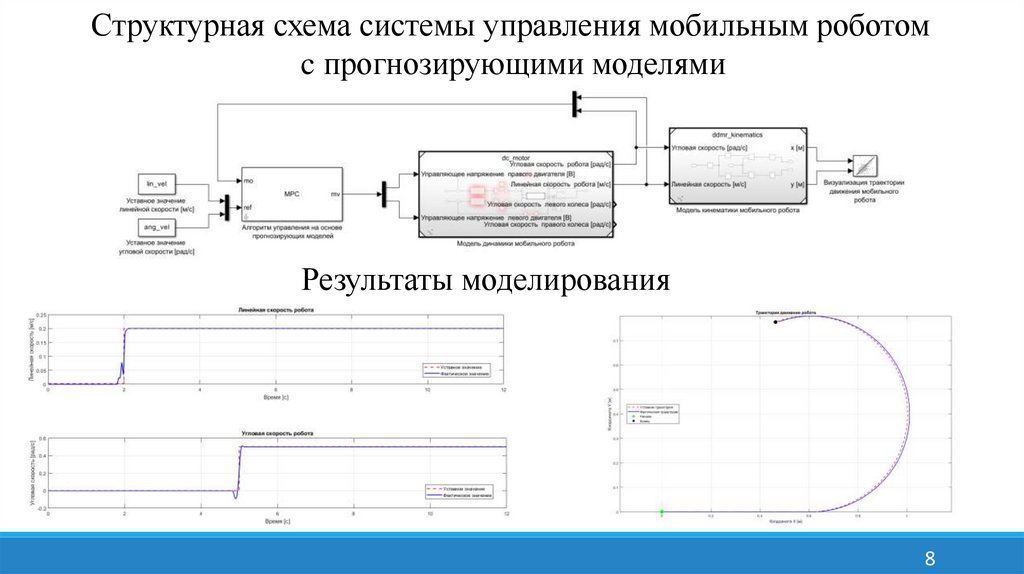
•Разработать структурную схему системы управления мобильным роботом на основе алгоритма управления с
прогнозирующей моделью.
•Программно реализовать алгоритм управления с прогнозирующей моделью.
•Разработать стенд для проведения экспериментальных исследований на основе аппаратно-программной
симуляции.
•Провести комплексные экспериментальные исследования.
2
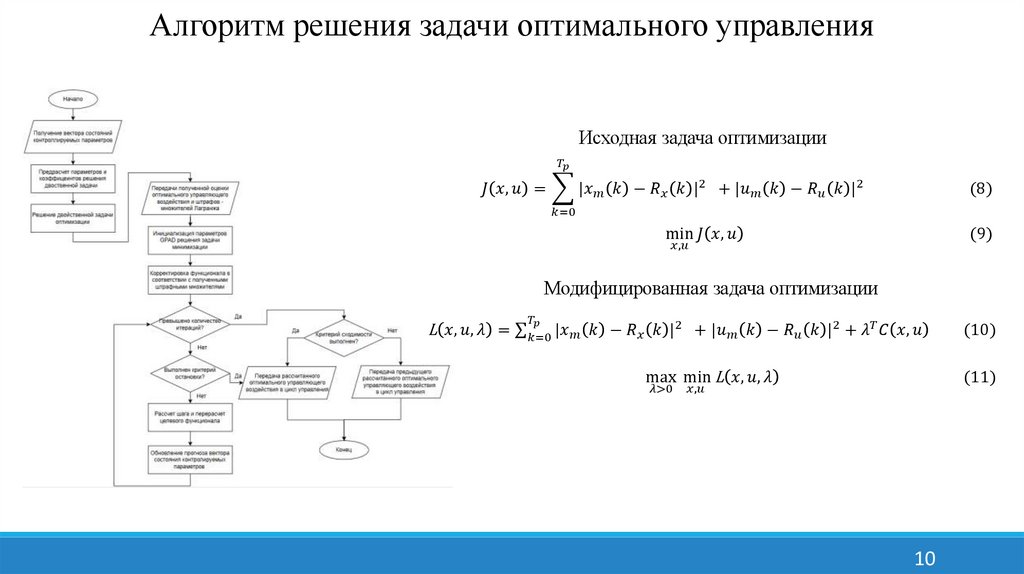
3.
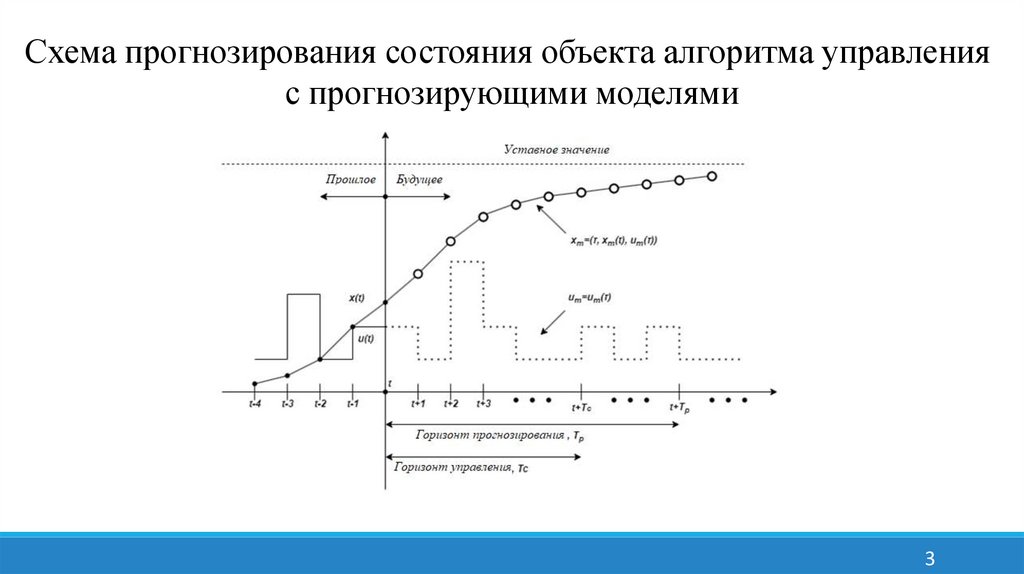
Схема прогнозирования состояния объекта алгоритма управленияс прогнозирующими моделями
3
4.
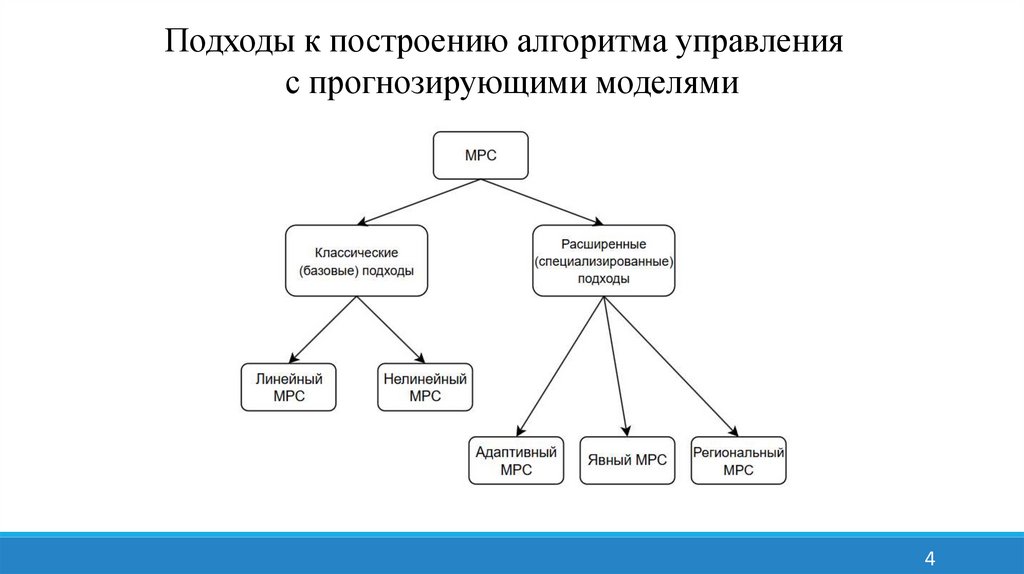
Подходы к построению алгоритма управленияс прогнозирующими моделями
4
5.
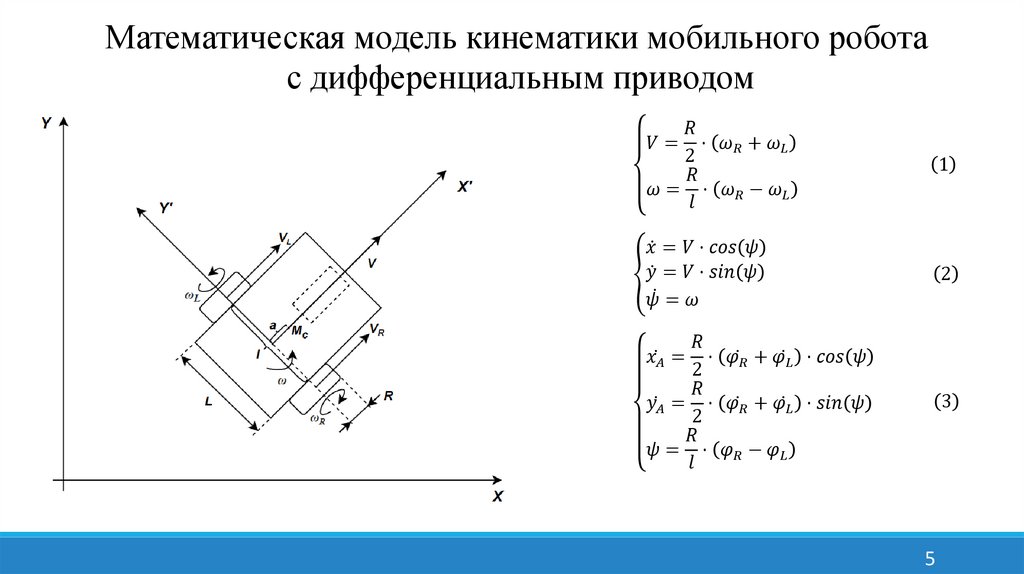
Математическая модель кинематики мобильного роботас дифференциальным приводом