
 software
softwareSimilar presentations:



")


")



Управление и сбор данных с многофункционального робота
1.
Инженерная школа цифровых технологийУправление и сбор данных с
многофункционального робота
Нестеров Даниил Александрович,
Полиенко Александр Вячеславович
ПМИ31м
2.
Управление и сбор данных с многофункционального роботаЦель работы: разработка экспериментального стенда для контроля угловой скорости
колес всенаправленного робота
Задачи:
1.Сконструировать модель всенаправленного робота и собрать его;
2.Разработка аппаратной схемы;
3.Разработать программное обеспечение для сбора данных;
4.Провести эксперимент по сбору данных.
3.
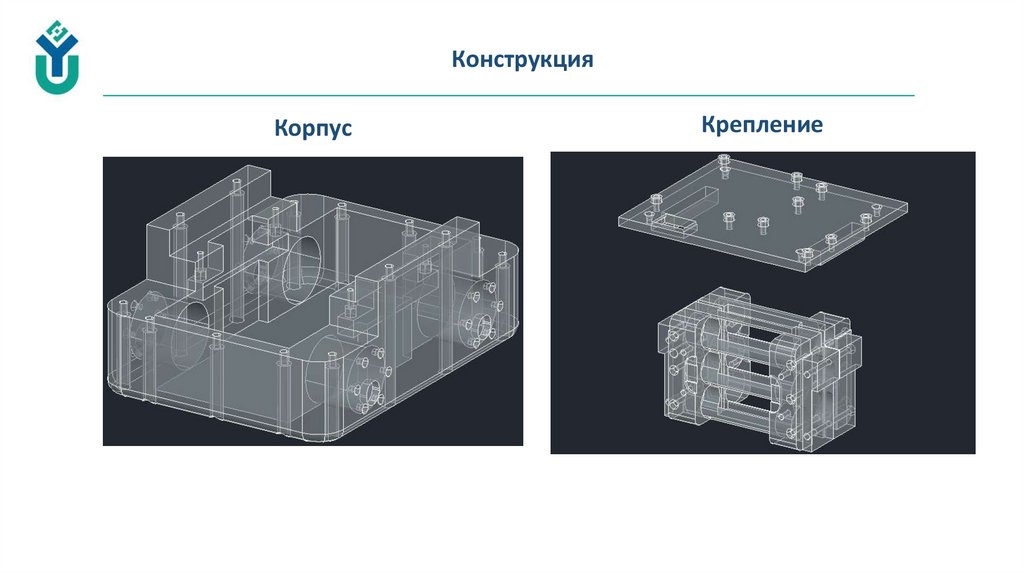
КонструкцияКорпус
Крепление
4.
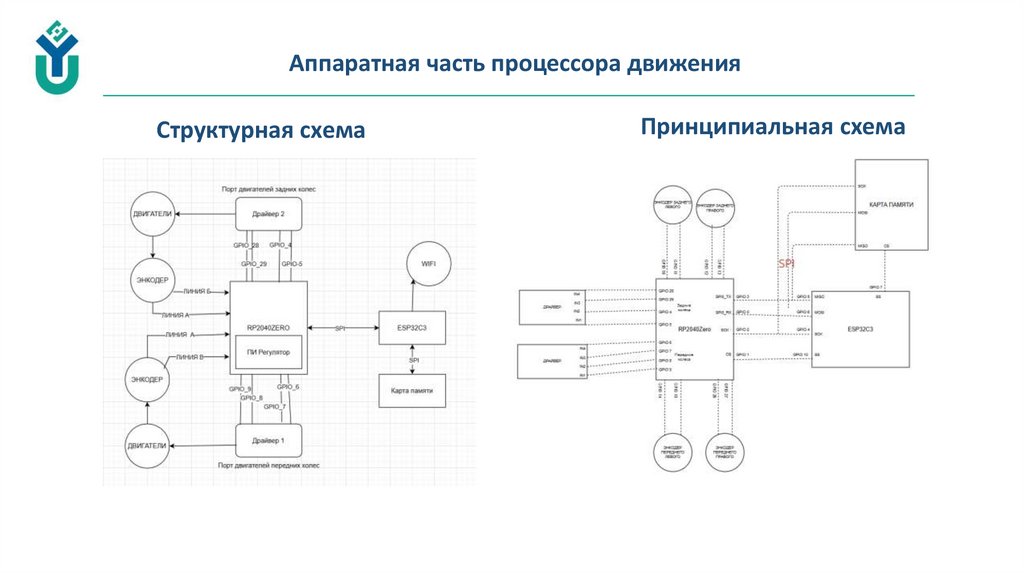
Аппаратная часть процессора движенияСтруктурная схема
Принципиальная схема
5.
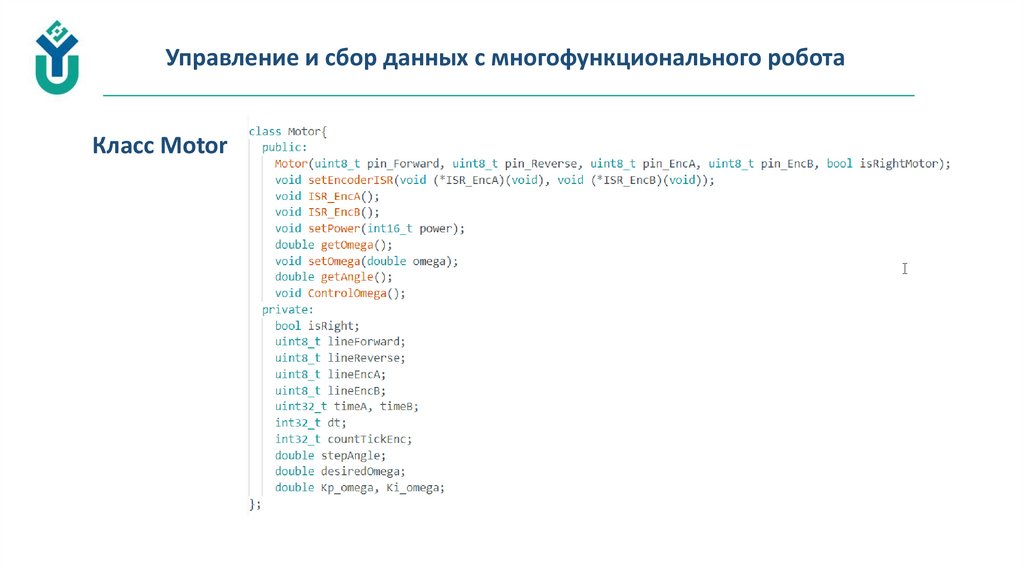
Управление и сбор данных с многофункционального роботаКласс Motor
6.
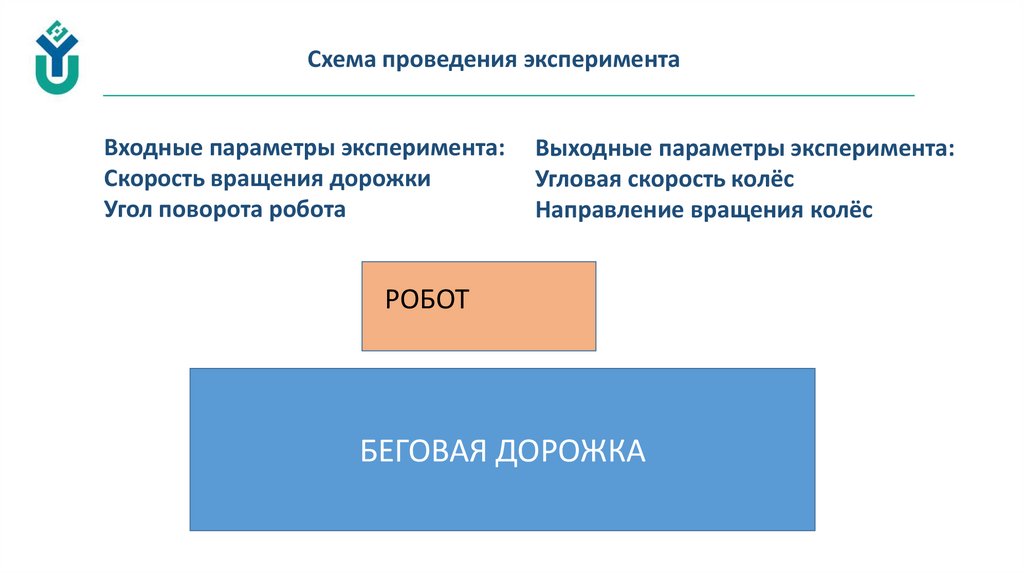
Схема проведения экспериментаВходные параметры эксперимента:
Скорость вращения дорожки
Угол поворота робота
Выходные параметры эксперимента:
Угловая скорость колёс
Направление вращения колёс
РОБОТ
БЕГОВАЯ ДОРОЖКА
7.
ЗаключениеНа данный
момент собрана
рабочая модель
робота и
происходит
написание
программного
обеспечения