

 software
softwareSimilar presentations:










Алгоритм управления роботом
1.
Алгоритм управленияроботом
Развитие современной робототехники привело к появлению
разнообразных способов управления роботами. В современной
армии наиболее распространены беспилотные летательные
аппараты (БПЛА) с различными видами управления и степенью
автономности. Операторы БПЛА выполняют серию шагов для
обнаружения, распознавания и измерения координат объектов, а
также оперативной передачи информации.
Aruzhan Berikova
2.
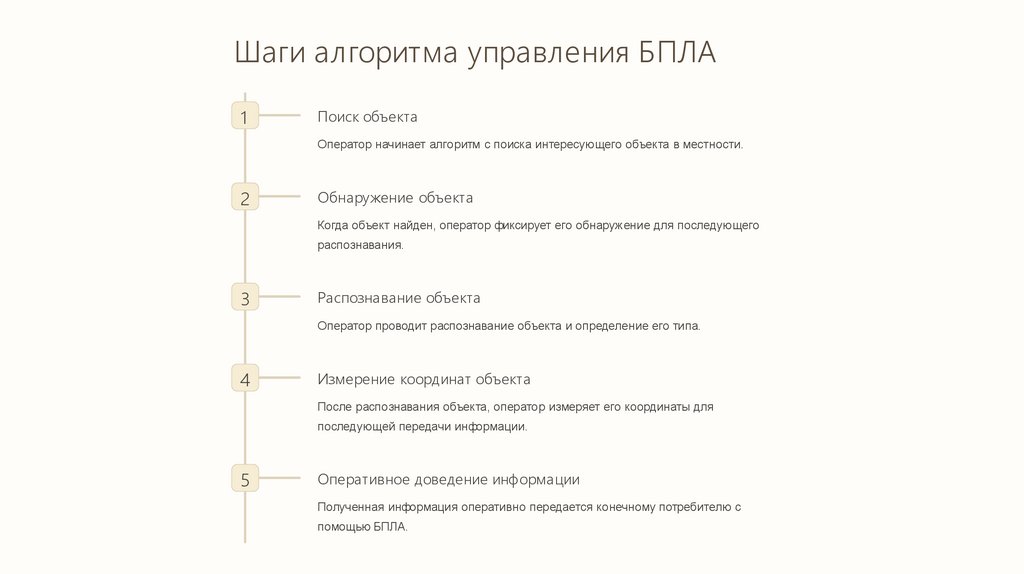
Шаги алгоритма управления БПЛА1
Поиск объекта
Оператор начинает алгоритм с поиска интересующего объекта в местности.
2
Обнаружение объекта
Когда объект найден, оператор фиксирует его обнаружение для последующего
распознавания.
3
Распознавание объекта
Оператор проводит распознавание объекта и определение его типа.
4
Измерение координат объекта
После распознавания объекта, оператор измеряет его координаты для
последующей передачи информации.
5
Оперативное доведение информации
Полученная информация оперативно передается конечному потребителю с
помощью БПЛА.
3.
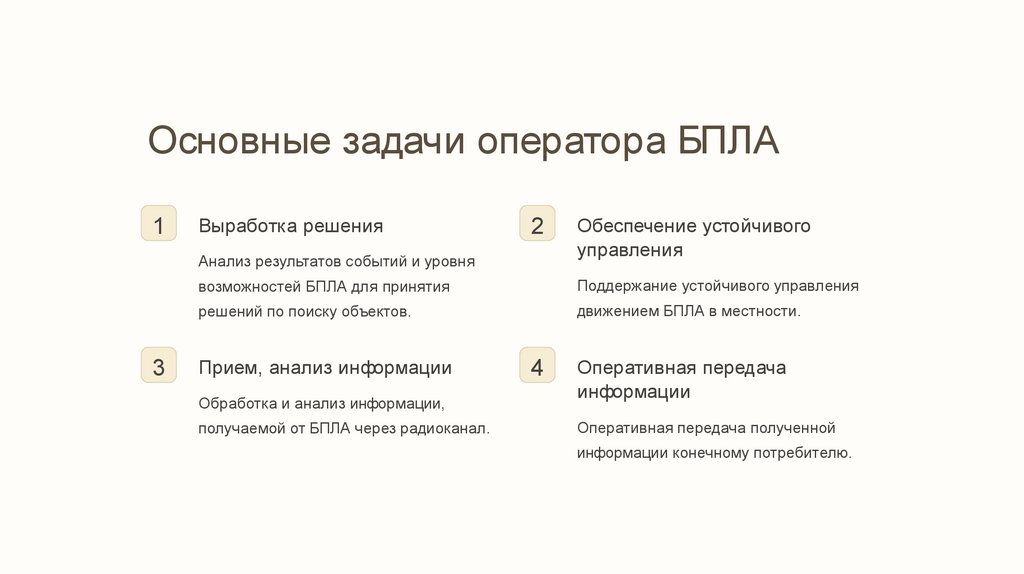
Основные задачи оператора БПЛА1
Выработка решения
2
Анализ результатов событий и уровня
3
Обеспечение устойчивого
управления
возможностей БПЛА для принятия
Поддержание устойчивого управления
решений по поиску объектов.
движением БПЛА в местности.
Прием, анализ информации
Обработка и анализ информации,
получаемой от БПЛА через радиоканал.
4
Оперативная передача
информации
Оперативная передача полученной
информации конечному потребителю.
4.
Воздушная разведкаСложные условия
Роль БПЛА
Эффективность
Военная разведка
Использование
Беспилотные
чрезвычайно опасна из-за
беспилотных
разведывательные
скрытия и защиты важных
разведывательных средств
средства могут
объектов противником.
оправдано в
значительно повысить
экстремальных условиях
эффективность выполнения
военных действий.
военных задач.
5.
Планирование траекторииПланирование траектории движения робота включает выбор законов управления для
обеспечения движения вдоль заданной траектории.
6.
Алгоритмы поиска путиОбход препятствий
Поиск пути по графу
Интеллектуальные
алгоритмы
Алгоритмы, направленные
Методы поиска пути на
на обход препятствий при
основе графов и
Продвинутые алгоритмы
планировании траектории
математических моделей
планирования траектории,
движения робота.
для определения
использующие
оптимального пути
искусственный интеллект и
движения.
машинное обучение.
7.
Модели и алгоритмы управлениягруппой роботов
1
2
3
Централизованное
управление
Децентрализованное
управление
Комбинированное
управление
Управление группой роботов
Индивидуальные системы
Объединение центрального
от одного центрального
управления перекрестно
управления с местными
устройства для согласования
связаны друг с другом для
устройствами для гибкого
и координации работы.
более гибкого
распределения задач и
взаимодействия роботов.
ресурсов.
8.
Проблемы группового управленияСовместные усилия
Сложные задачи
Возникающие проблемы
Решение сложных задач
требуют обеспечения
требует глубокого
Необходимость
совместных усилий для
анализа и координации
обеспечения
эффективного
работы между
эффективного
функционирования
управляемыми узлами.
взаимодействия между
системы управления.
Групповое
взаимодействие
членами группы для
достижения общих
целей.
9.
Развитие робототехникиБезопасность жизни оператора
Дистанционное управление роботами обеспечивает безопасность
оператора в опасных условиях.
Эффективность решений
Автономные роботы способны принимать точные решения в
экстремальных ситуациях.
Коллективное управление
Роботы, управляемые групповыми алгоритмами, могут эффективно
решать сложные задачи.
10.
Перспективы робототехники в военныхсферах
Безопасность
Эффективность
Инновации
Управление роботами без
Роботы могут решать
Развитие технологий
риска для жизни
сложные задачи в
группового управления
сотрудников вооруженных
экстремальных условиях и
открывает новые
сил.
повышать общую
перспективы в сфере
эффективность операций.
военной робототехники.