


 electronics
electronicsSimilar presentations:










Проектирование и автоматизация производственных процессов в добывающей промышленности
1.
Иркутский национальный исследовательский технический университетЦифровая кафедра
Проектирование и автоматизация
производственных процессов в добывающей
промышленности
Иркутск, 2025
2.
Тема проекта: Автоматизированное управлениемеханизмом подъема карьерного экскаватора для
погрузки рудных материалов
Научный руководитель: Дунаев Андрей Михайлович, к.т.н., доцент кафедры
электропривода и электрического транспорта ФГБОУ ВО «ИРНИТУ»
Команда проекта: студенты группы ЭАПЭб-23-1
Завьялов Илья
Сергеевич
Круткин Алексей
Константинович
Кузнецов Артём
Вячеславович
Лагутин Егор
Константинович
2
3.
Цель проекта: разработка системы программногоуправления механизмом подъема карьерного экскаватора
при производстве погрузочных работ
Для реализации проекта необходимо решить
следующие задачи:
провести анализ области применения и конструкции
объекта управления;
предложить техническую реализацию способа
управления;
разработать циклограммы работы механизма подъема;
разработать алгоритм работы ПЛК системы управления;
разработать программу работы ПЛК системы
управления;
определить экспериментальные циклограммы работы.
3
4.
Область применения карьерного экскаватораКарьерный экскаватор
представляет собой
машину, предназначенную
для масштабных
погрузочных работ при
добыче полезных
ископаемых, например,
угля. Большой объём ковша
позволяет захватывать
большое количество
материала. Это
обуславливает его
применение в
горнодобывающей отрасли.
Карьерный экскаватор типа «обратная лопата»
4
5.
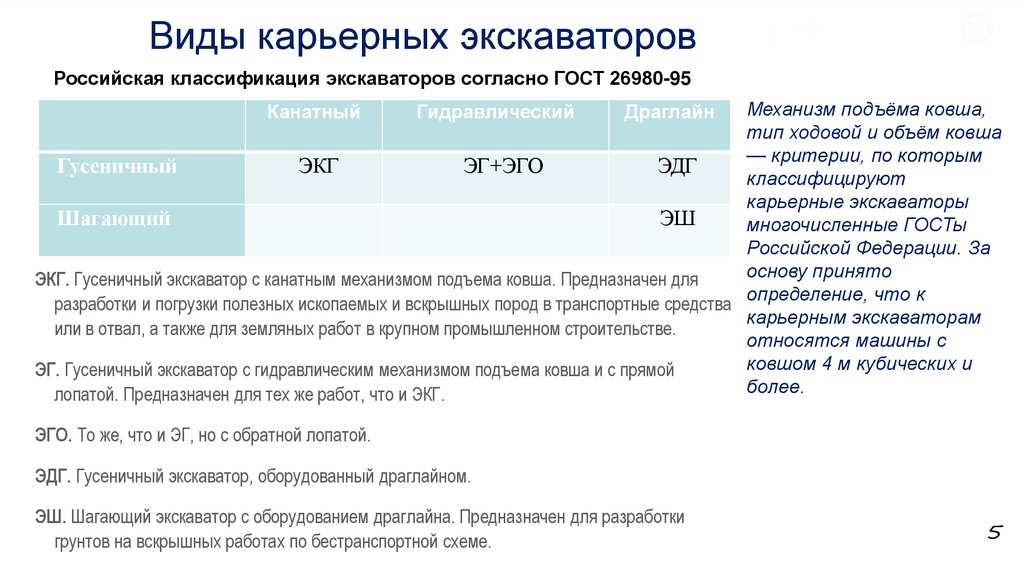
Виды карьерных экскаваторовРоссийская классификация экскаваторов согласно ГОСТ 26980-95
Механизм подъёма ковша,
тип ходовой и объём ковша
— критерии, по которым
Гусеничный
ЭКГ
ЭГ+ЭГО
ЭДГ
классифицируют
карьерные экскаваторы
Шагающий
ЭШ
многочисленные ГОСТы
Российской Федерации. За
основу принято
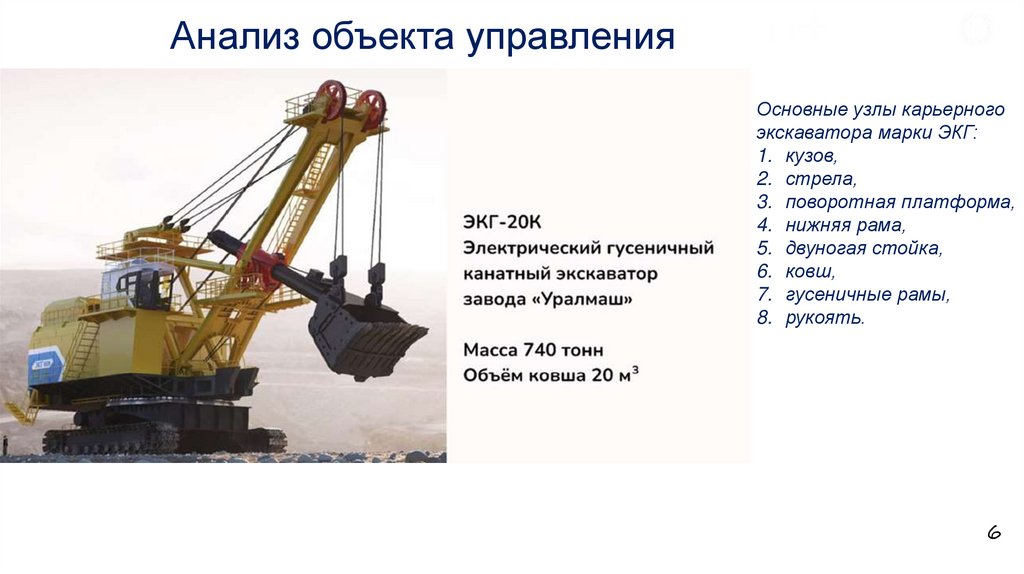
ЭКГ. Гусеничный экскаватор с канатным механизмом подъема ковша. Предназначен для
определение, что к
разработки и погрузки полезных ископаемых и вскрышных пород в транспортные средства
карьерным экскаваторам
или в отвал, а также для земляных работ в крупном промышленном строительстве.
относятся машины с
ковшом 4 м кубических и
ЭГ. Гусеничный экскаватор с гидравлическим механизмом подъема ковша и с прямой
более.
лопатой. Предназначен для тех же работ, что и ЭКГ.
Канатный
Гидравлический
Драглайн
ЭГО. То же, что и ЭГ, но с обратной лопатой.
ЭДГ. Гусеничный экскаватор, оборудованный драглайном.
ЭШ. Шагающий экскаватор с оборудованием драглайна. Предназначен для разработки
грунтов на вскрышных работах по бестранспортной схеме.
5
6.
Анализ объекта управленияОсновные узлы карьерного
экскаватора марки ЭКГ:
1. кузов,
2. стрела,
3. поворотная платформа,
4. нижняя рама,
5. двуногая стойка,
6. ковш,
7. гусеничные рамы,
8. рукоять.
6
7.
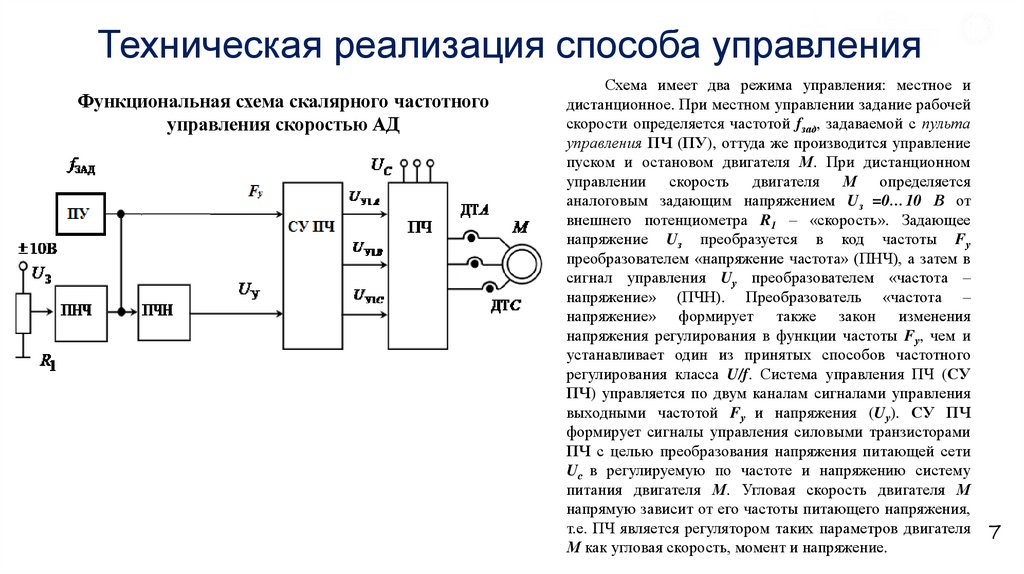
Техническая реализация способа управленияФункциональная схема скалярного частотного
управления скоростью АД
Схема имеет два режима управления: местное и
дистанционное. При местном управлении задание рабочей
скорости определяется частотой fзад, задаваемой с пульта
управления ПЧ (ПУ), оттуда же производится управление
пуском и остановом двигателя М. При дистанционном
управлении скорость двигателя М определяется
аналоговым задающим напряжением Uз =0…10 В от
внешнего потенциометра R1 – «скорость». Задающее
напряжение Uз преобразуется в код частоты Fу
преобразователем «напряжение частота» (ПНЧ), а затем в
сигнал управления Uу преобразователем «частота –
напряжение» (ПЧН). Преобразователь «частота –
напряжение» формирует также закон изменения
напряжения регулирования в функции частоты Fу, чем и
устанавливает один из принятых способов частотного
регулирования класса U/f. Система управления ПЧ (СУ
ПЧ) управляется по двум каналам сигналами управления
выходными частотой Fу и напряжения (Uу). СУ ПЧ
формирует сигналы управления силовыми транзисторами
ПЧ с целью преобразования напряжения питающей сети
Uс в регулируемую по частоте и напряжению систему
питания двигателя М. Угловая скорость двигателя М
напрямую зависит от его частоты питающего напряжения,
т.е. ПЧ является регулятором таких параметров двигателя
М как угловая скорость, момент и напряжение.
7
8.
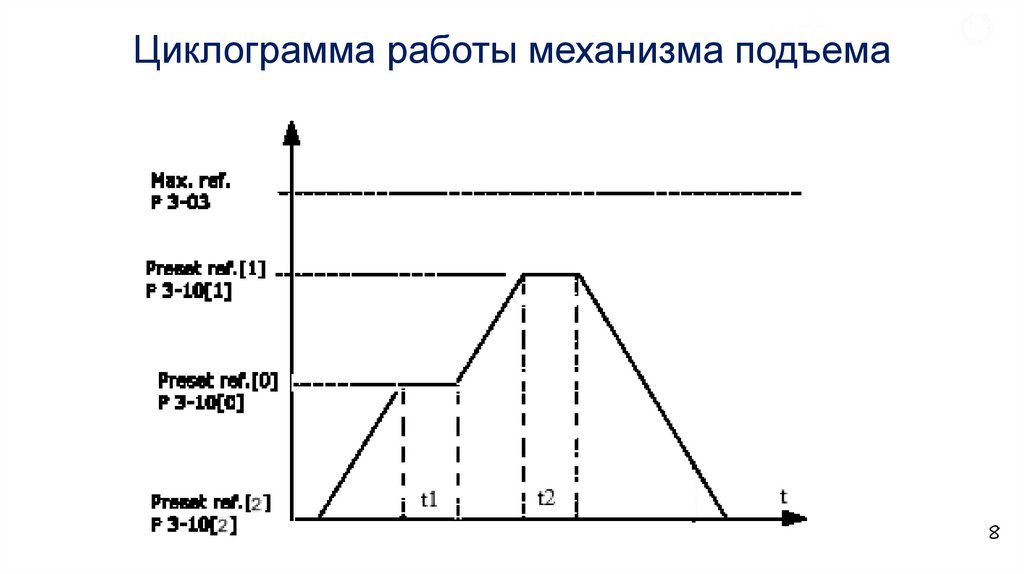
Циклограмма работы механизма подъема8
9.
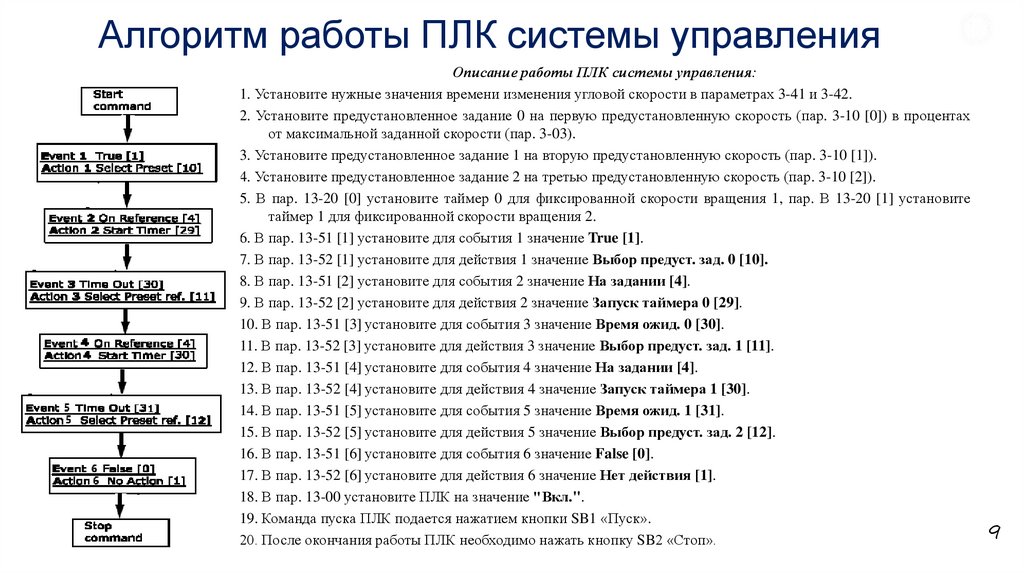
Алгоритм работы ПЛК системы управленияОписание работы ПЛК системы управления:
1. Установите нужные значения времени изменения угловой скорости в параметрах 3-41 и 3-42.
2. Установите предустановленное задание 0 на первую предустановленную скорость (пар. 3-10 [0]) в процентах
от максимальной заданной скорости (пар. 3-03).
3. Установите предустановленное задание 1 на вторую предустановленную скорость (пар. 3-10 [1]).
4. Установите предустановленное задание 2 на третью предустановленную скорость (пар. 3-10 [2]).
5. В пар. 13-20 [0] установите таймер 0 для фиксированной скорости вращения 1, пар. В 13-20 [1] установите
таймер 1 для фиксированной скорости вращения 2.
6. В пар. 13-51 [1] установите для события 1 значение True [1].
7. В пар. 13-52 [1] установите для действия 1 значение Выбор предуст. зад. 0 [10].
8. В пар. 13-51 [2] установите для события 2 значение На задании [4].
9. В пар. 13-52 [2] установите для действия 2 значение Запуск таймера 0 [29].
10. В пар. 13-51 [3] установите для события 3 значение Время ожид. 0 [30].
11. В пар. 13-52 [3] установите для действия 3 значение Выбор предуст. зад. 1 [11].
12. В пар. 13-51 [4] установите для события 4 значение На задании [4].
13. В пар. 13-52 [4] установите для действия 4 значение Запуск таймера 1 [30].
14. В пар. 13-51 [5] установите для события 5 значение Время ожид. 1 [31].
15. В пар. 13-52 [5] установите для действия 5 значение Выбор предуст. зад. 2 [12].
16. В пар. 13-51 [6] установите для события 6 значение False [0].
17. В пар. 13-52 [6] установите для действия 6 значение Нет действия [1].
18. В пар. 13-00 установите ПЛК на значение "Вкл.".
19. Команда пуска ПЛК подается нажатием кнопки SB1 «Пуск».
20. После окончания работы ПЛК необходимо нажать кнопку SB2 «Стоп».
9
10.
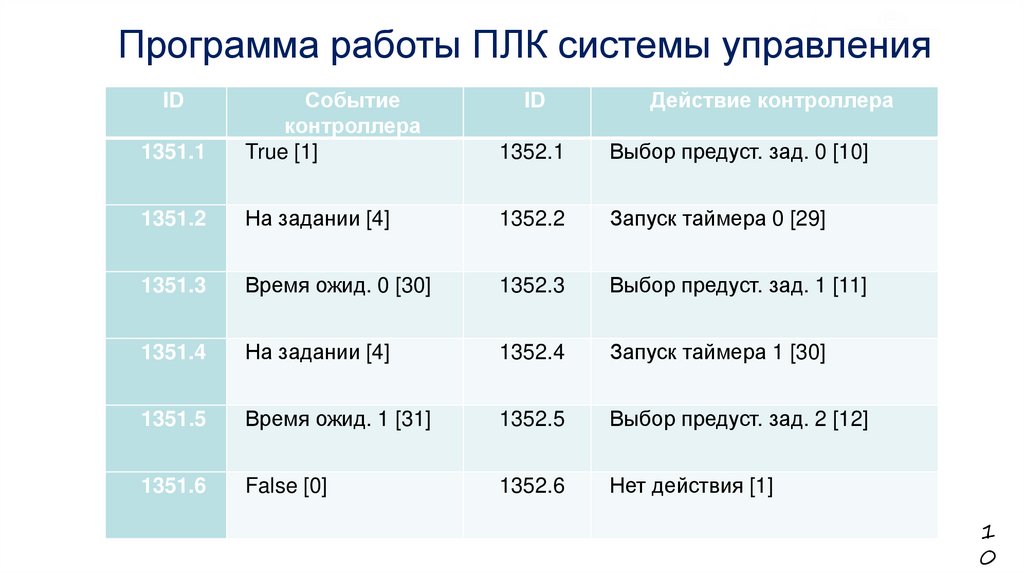
Программа работы ПЛК системы управленияДействие контроллера
1351.1
Событие
контроллера
True [1]
1352.1
Выбор предуст. зад. 0 [10]
1351.2
На задании [4]
1352.2
Запуск таймера 0 [29]
1351.3
Время ожид. 0 [30]
1352.3
Выбор предуст. зад. 1 [11]
1351.4
На задании [4]
1352.4
Запуск таймера 1 [30]
1351.5
Время ожид. 1 [31]
1352.5
Выбор предуст. зад. 2 [12]
1351.6
False [0]
1352.6
Нет действия [1]
ID
ID
1
0
11.
Экспериментальная циклограмма работымеханизма подъема
1
1
12.
Заключение1. Проведен анализ области применения и
конструкции карьерного экскаватора марки
ЭКГ.
2. Предложена техническая реализация способа
управления механизмом подъема.
3. Разработаны циклограммы работы механизма
подъема.
4. Разработан алгоритм работы ПЛК системы
управления механизмом подъема.
5. Разработана программа работы ПЛК системы
управления механизмом подъема.
6. Определены экспериментальные циклограммы
работы механизмом подъема.
1
2
13.
Библиографический список1. Руководство по программированию FC-302.- Москва, 2010. 207 с.
2. Дунаев М. П. Программно-управляемые исполнительные механизмы
в системах автоматизации [Электронный ресурс]: методические указания для
выполнения практических занятий для дополнительной профессиональной
программы профессиональной переподготовки «Проектирование и
автоматизация производственных процессов в добывающей промышленности»
/ Иркутск: Изд-во ИРНИТУ, 2023. 23 с.
3. Дунаев М. П. Автоматизированные системы управления электроприводом:
методические указания для выполнения лабораторных работ: направление подготовки
13.04.02 "Электроэнергетика и электротехника": программа "Компьютерные
технологии в электроприводе": квалификация (степень) магистр / М. П. Дунаев, 2018
http://elib.istu.edu/viewer/view.php?file=/files/er-4812.pdf
4. Дунаев М. П. Автоматизированные системы управления электроприводом
[Электронный ресурс]: учебное пособие по специальности 140000 - Энергетика,
энергетическое машиностроение и электротехника / М. П. Дунаев, 2012. 131 с.
http://elib.istu.edu/viewer/view.php?file=/files/er-4812.pdf
5. Дунаев М. П. Автоматизированные системы управления электроприводом:
методические указания для выполнения курсового проекта: направление подготовки
13.04.02 "Электроэнергетика и электротехника": программа "Компьютерные
технологии в электроприводе": квалификация (степень) магистр / М. П. Дунаев, 2018
http://elib.istu.edu/viewer/view.php?file=/files/er-4812.pdf
1
3
14.
ЛАБОРАТОРИЯ ЭНЕРГЕТИКИСПАСИБО ЗА ВНИМАНИЕ!
14