




 electronics
electronicsSimilar presentations:






")



Автоматизация проектирования
1.
Курс лекцийАвтоматизация проектирования
доцент НИЯУ МИФИ
Пашенцев Владимир Николаевич
2024
2.
Автоматизированные системы используются для измеренийэлектрических параметров и для управления технологическими
установками с помощью программируемых модулей
(контролеров) и персонального компьютера.
Измерительные системы – совокупность функционально
объединенных мер, измерительных приборов, измерительных
преобразователей и компьютера, размещенных в разных точках
контролируемого объекта измерения.
3.
Преимущества ИС по сравнению с цифровыми приборами• Большой объем хранимой информации
• Управление приборами из ПК для считывания измеренных
данных в ПК.
• Обработка полученных данных программными средствами.
• Передача данных на большие расстояния по сети связи (Wi-fi)
• Управление внешними устройствами на основе результатов
измерения, полученных от этих устройств.
• Возможность простого изменения измерительной системы
путем замены модулей и плат.
4.
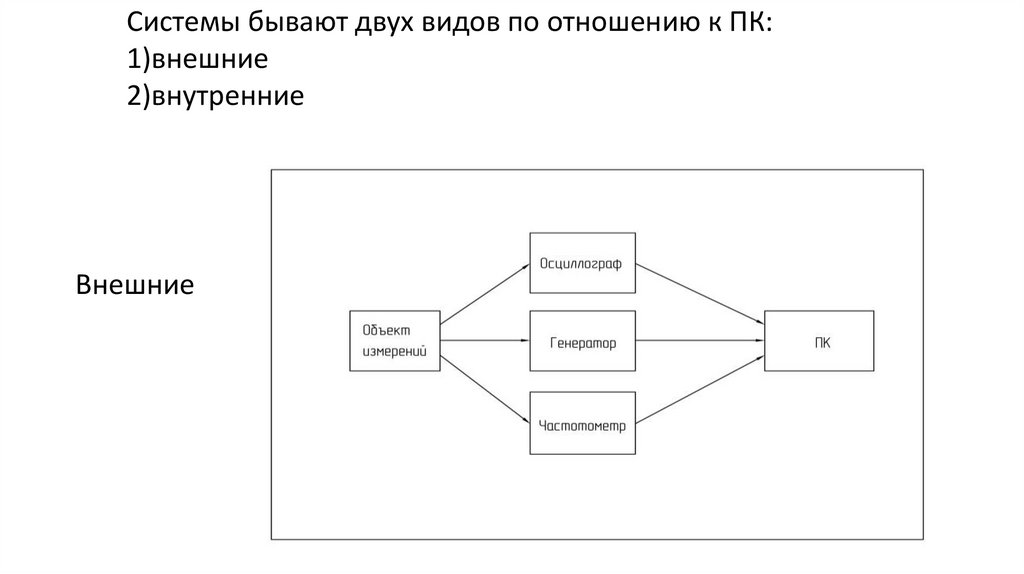
Системы бывают двух видов по отношению к ПК:1)внешние
2)внутренние
Внешние
5.
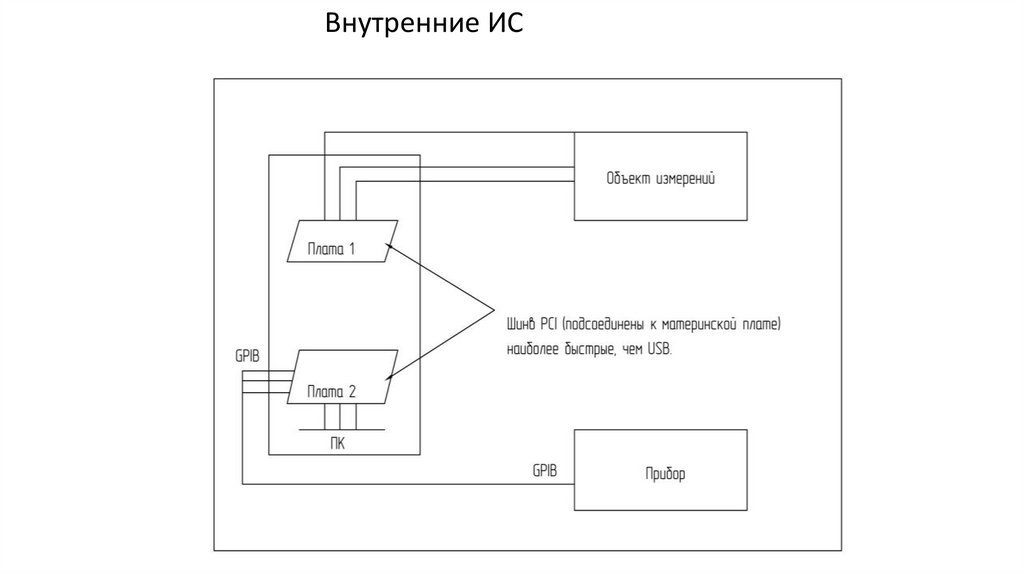
Внутренние ИС6.
Структурная схема измерительной системы7.
Объект измеренияД – датчики (первичные преобразователи) преобразуют физические
величины (Т, Р, В …) в аналоговые электрические сигналы.
ЦД – цифровые датчики (датчики с цифровым выходом), на выходе
цифровой код, это означает, что датчик содержит встроенный АЦП
(аналоговый датчик с усилителем и АЦП). Датчики могут быть
самостоятельными устройствами для подключения к ПК через USB
и RS-232.
ЦР – это цифровой регулятор с цифровым регистром на входе.
Позволяет управлять объектом цифровым двоичным кодом.
Например, если объект управления содержит шаговый двигатель, то
скоростью можно управлять программно от ПК, путем изменения
цифровых кодов на входе регистра управления двигателя.
8.
АР – аналоговый регулятор служит для управления объектоманалоговыми непрерывными сигналами.
К управляемым устройствам относиться: двигатели, клапаны,
электромагниты, нагревательные элементы.
Их силовая часть питается от сети переменного тока, но ими
управляют слаботочные аналоговые сигналы плат или
модулей, соединенных с ПК.
9.
Состав измерительной системыВУ – входное устройство. Предназначено для первичного
преобразования формы и амплитуды входных сигналов к
заданному уровню рабочего диапазона АЦП.
Входное устройство может содержать:
аттенюаторы, усилители, коммутаторы, схемы
выборки/хранения, компараторы (устройства сравнения),
повторители напряжения, согласующие устройства, фильтры,
преобразователи переменного напряжения в постоянное
(диодные мосты).
10.
АЦП – аналоговый цифровой преобразователь (служит дляпреобразования аналогового сигнала в цифровой код).
ЦВ/В – цифровой ввод-вывод служит для получения цифровых
сигналов от объекта измерений и для управления объектом
цифровыми кодами.
Они содержат два цифровых регистра на 8-12 бит: один - для
ввода цифровых кодов, другой - для вывода цифровых кодов
для управления.
Таймер (тактовый генератор) – вырабатывает периодические
импульсы образцовой частоты, которые задают тактовую
частоту работы цифровых устройств.
11.
ЦАП – цифроаналоговый преобразователь. На основе ЦАПможно создать измерительный генератор сигналов различной
формы (синусоида, прямоугольный импульс, пилообразное
напряжение, меандр).
С помощью аналоговых сигналов также можно управлять
объектом измерений через аналоговый выход ИС.
ОЗУ – оперативно запоминающее устройство. Служит для
записи данных, поступающих на вход измерительной системы.
ОЗУ является быстродействующим для работы в реальном
масштабе времени.
12.
ПЗУ – постоянное запоминающее устройство. Служит дляхранения информации, которая необходима для
взаимодействия отдельных узлов измерительной системы. В
ПЗУ записаны программы, обеспечивающие самодиагностику
и функционирование отдельных узлов измерительных систем.
МП – микропроцессор, используется для управления узлами
измерительного модуля. Вместо МП может использоваться
программируемый микроконтроллер, в ПЗУ которого записан
алгоритм работы измерительного модуля.
13.
КП – (УС) – канал передачи (устройство сопряженияизмерительного модуля с компьютером).
Преобразует данные магистральной шины измерительного
модуля к виду стандартного интерфейса ПК:
USB, RS-232 или к приборному интерфейсу GPIB (IEE-488), HP488, KOП – канал общего пользования.
14.
Платы ввода/вывода данных в компьютерПлата ввода/вывода применяется:
•для измерений параметров сигналов от датчиков,
• для сбора и хранения данных,
•программной обработки полученных данных,
• управления внешними устройствами по заданной
программе цифровыми и аналоговыми сигналами.
15.
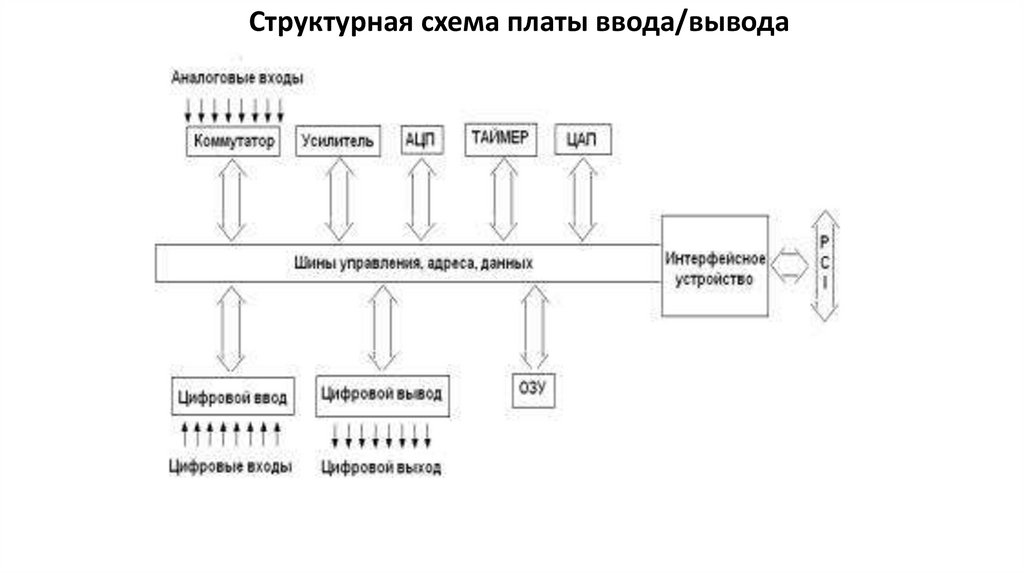
Структурная схема платы ввода/вывода16.
Состав платы:• многоканальный коммутатор аналоговых сигналов,
• усилитель с программируемым коэффициентом усиления,
• таймер,
• АЦП,
• ЦАП,
• блок цифрового ввода,
• блок цифрового вывода
• устройство сопряжения с компьютером.
Управление происходит по шинам: управления, адреса,
данных.
Устройство сопряжения служит для обмена данными между
внутренней шиной платы и шиной PCI системной платы
персонального компьютера.
17.
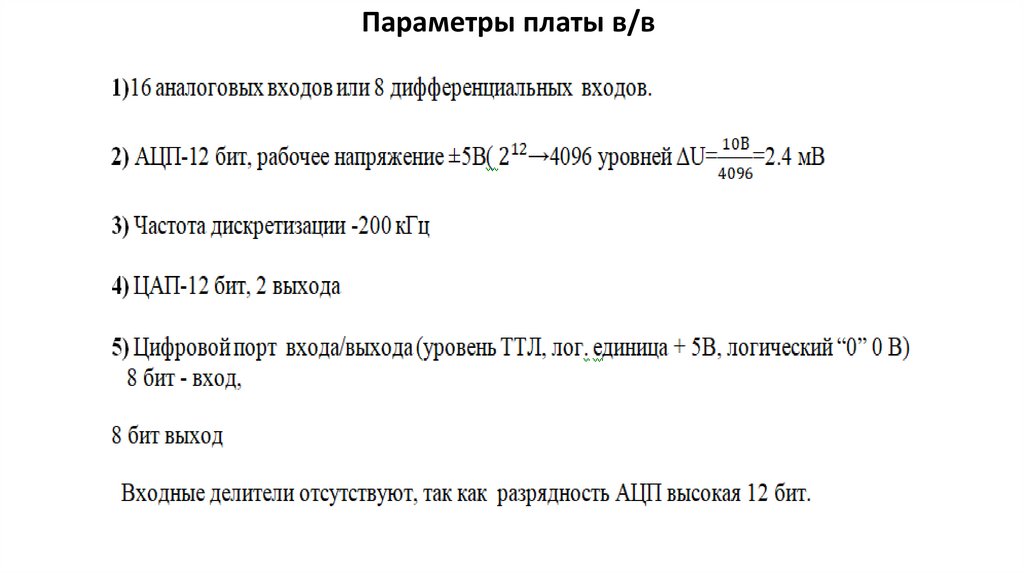
Параметры платы в/в18.
Элементы платы ввода выводаКоммутатор может иметь 4, 8, 16 входов, которые могут быть включены
дифференциально. При дифференциальном включении число входов будет
соответственно 2, 4, 8.
Коммутатор служит для поочередного подключения входных сигналов к
усилителю.
Для того чтобы зафиксировать мгновенное значение напряжения
одновременно по всем каналам, внутри коммутатора установлена схема
выборки-хранения. Для этих целей обычно используются конденсаторы с
малым током утечки.
Коммутатор последовательно или выборочно опрашивает все каналы
системы выборки-хранения, на которых зафиксированы напряжения в один и
тот же момент времени.
Ток разряда конденсаторов пренебрежимо мал, поэтому за время опроса
всех каналов напряжение на конденсаторах остается неизменным.
19.
Усилитель служит для приведения напряжения к рабочемудиапазону АЦП.
Он имеет программно устанавливаемые коэффициенты
усиления, кратные значениям 2, 5, 10.
Усилитель имеет большое входное сопротивление, чтобы
оказывать минимальное влияние на измерительную цепь
при подключении к ней аналоговых входов платы.
На выходе усилителя может быть установлен фильтр,
ограничивающий полосу пропускания ниже максимальной
частоты дискретизации АЦП.
20.
АЦП служит для преобразования мгновенных значений сигнала вцифровой код. Мгновенные значения сигнала считываются через
одинаковый интервал времени – шаг дискретизации.
Рабочий диапазон АЦП обычно составляет ±1 В, ±2 В, ±5 В. Для
приведения напряжения к этому уровню на входе АЦП устанавливают
делитель или усилитель с программируемым коэффициентом усиления.
Входной усилитель можно не использовать, если применять относительно
многоразрядный АЦП (12–15 бит), имеющий небольшой шаг квантования
при рабочем диапазоне в единицы вольт.
Например, для АЦП 12 бит при рабочем диапазоне ±1 В шаг квантования
будет составлять 2В/4096 = 0,5 мВ. Поэтому погрешность измерения
напряжения в диапазоне 10 – 100 мВ будет составлять 0,5 – 5 %.
С выхода АЦП цифровой код поступает в ОЗУ или сразу на шину данных
платы. Запуск АЦП происходит программно путем обращения по адресу АЦП
или по сигналам таймера.
21.
Таймер – программируемый генератор тактовых импульсов, служащийдля запуска АЦП и других устройств платы. Интервал времени между
запусками АЦП (период импульсов таймера) должен быть больше
времени преобразования АЦП.
Таймер осуществляет аппаратный запуск АЦП вне зависимости от
тактовых импульсов шины системной платы ПК.
Другой запуск по флажку готовности
После каждого преобразования АЦП формируется импульс готовности,
который может фиксироваться программой, работающей в режиме
ожидания.
Импульс готовности используется в качестве сигнала прерывания на
системной плате ПК. При этом обеспечивается максимальное
быстродействие платы, так как прием данных в ПК происходит во время,
когда АЦП уже запущен на новый цикл преобразования.
22.
Цифровой ввод/вывод параллельного типа служит для приемацифровых сигналов от внешних устройств и для управления
внешними устройствами цифровыми кодами, формируемыми
компьютером.
Обмен данными с внешними цифровыми устройствами осуществляется
путем чтения байта из буфера ввода и записи байта в буфер вывода.
Цифровой выход имеет повышенную нагрузочную способность для
подключения внешних устройств.
Цифровой ввод/вывод может иметь на плате гальваническую развязку
для защиты компьютера от нежелательных наводок и помех, связанных
с работой внешних устройств.
23.
ЦАП преобразует цифровые коды, формируемые программойуправления, в аналоговый непрерывный сигнал. Из-за того, что
напряжение на выходе ЦАП в промежутке между выборками
остается неизменным, кривая сигнала во времени представляет
собой многоступенчатую функцию, повторяющую форму сигнала,
заданного в аналитическом виде.
Чем выше разрядность ЦАП, тем ближе приближение сигнала
ступенчатой формы к относительно гладкой кривой. Уменьшение
шага квантования (увеличение разрядности ЦАП) ниже уровня
шумов и наводок не целесообразно.
24.
ОЗУ служит для промежуточного накопления данных из АЦП, еслитребуется, чтобы частота дискретизации сигнала была выше тактовой
частоты на системной плате ПК.
Объем ОЗУ составляет 4–132 Кбайт. Так как для передачи одного
байта требуется несколько тактов на системной шине ПК, то
максимальная частота дискретизации платы во много раз меньше
рабочей частоты системной платы.
Предельная частота дискретизации платы составляет единицы
мегагерц (~100 МГц/10 тактов)
25.
Интерфейсное устройство – согласующее устройство (устройствосопряжения) между внутренней шиной платы и системной магистралью
PCI персонального компьютера.
В его состав входят
• буферные цифровые регистры,
• дешифратор адреса
• формирователь сигналов прерываний (IRQ) для прямого доступа к
памяти (DMA).
Буферные регистры предназначены для электрического согласования
двух магистралей: электрической развязки и передачи сигналов в
определенном направлении.
Дешифратор адреса служит для распознавания платой адресов своих
модулей среди множества адресов устройств системного блока
компьютера.
26.
Применение звуковой карты для ввода/выводааналоговых сигналов
Звуковая карта вместе с программным обеспечением может
использоваться в качестве:
• двухканального осциллографа (программы: “Digital Oscilloscope 3.0”,
“Oscilloscope 2.51”, “Winscope”, “Spectra Plus”),
• генератора сигналов (“Sine Wave Generator 3.0”),
• частотомера (“Frequency Counter 1.01”)
• анализатора спектра (“Oscilloscope 2.51”).
Параметры осциллографа на основе звуковой карты:
частота дискретизации 44,1 кГц,
полоса пропускания 50 Гц – 20 кГц,
разрядность АЦП 16-24 бит,
входное напряжение на линейных входах 0,3 В,
вход закрытый (на входе платы включен разделительный конденсатор
для ее защиты от постоянного напряжения).
27.
Программирование платы ввода/выводаПлата занимает часть адресного пространства ввода/вывода ПК.
В адресном пространстве персонального компьютера имеются
стандартные свободные адреса ввода/вывода для подключения различных
дополнительных плат: H300, H220, H200, записанные в шестнадцатеричной
системе кодирования.
На плате ввода/вывода установлены перемычки или микропереключатели,
с помощью которых можно выбрать один из этих адресов. Этот адрес
называется базовым.
Каждый блок платы имеет свой адрес в диапазоне от H1 до H20,
называемый смещением относительно базового адреса.
Например, если адрес цифрового порта ввода равен H10 и на плате
установлен базовый адрес H300, то в программе информация считывается
из порта с адресом H310.
28.
Программирование платы состоит в записи и считывании данных черезцифровые порты, а также управления запуском АЦП и ЦАП путем
адресного обращения к этим модулям.
Например, считывание кода из порта ввода данных осуществляется
командой Visual Basic:
RES =Inp(H310)
В результате выполнения этой команды в переменную RES будет
записано десятичное число от 0 до 255, соответствующее двоичному коду
на восьми входных контактах разъема порта ввода.
Если на двух младших битах будет напряжение логической единицы (+ 5
В), а на остальных будет логический нуль (0,0,0,0,0,0,5,5 В), то в
переменную RES будет записана цифра 3, соответствующая двоичному
коду (00000011).
29.
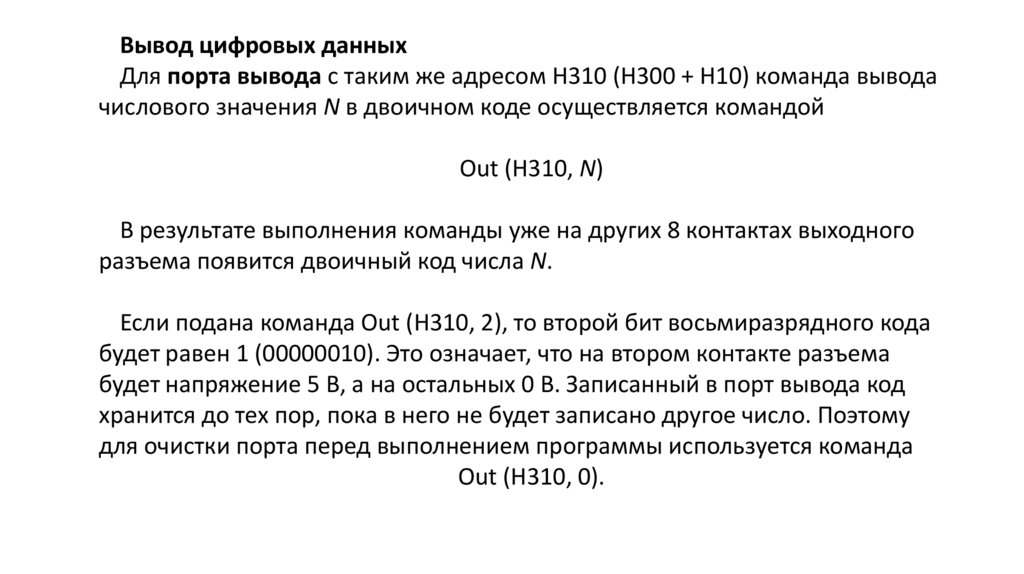
Вывод цифровых данныхДля порта вывода с таким же адресом H310 (H300 + H10) команда вывода
числового значения N в двоичном коде осуществляется командой
Out (H310, N)
В результате выполнения команды уже на других 8 контактах выходного
разъема появится двоичный код числа N.
Если подана команда Out (H310, 2), то второй бит восьмиразрядного кода
будет равен 1 (00000010). Это означает, что на втором контакте разъема
будет напряжение 5 В, а на остальных 0 В. Записанный в порт вывода код
хранится до тех пор, пока в него не будет записано другое число. Поэтому
для очистки порта перед выполнением программы используется команда
Out (H310, 0).
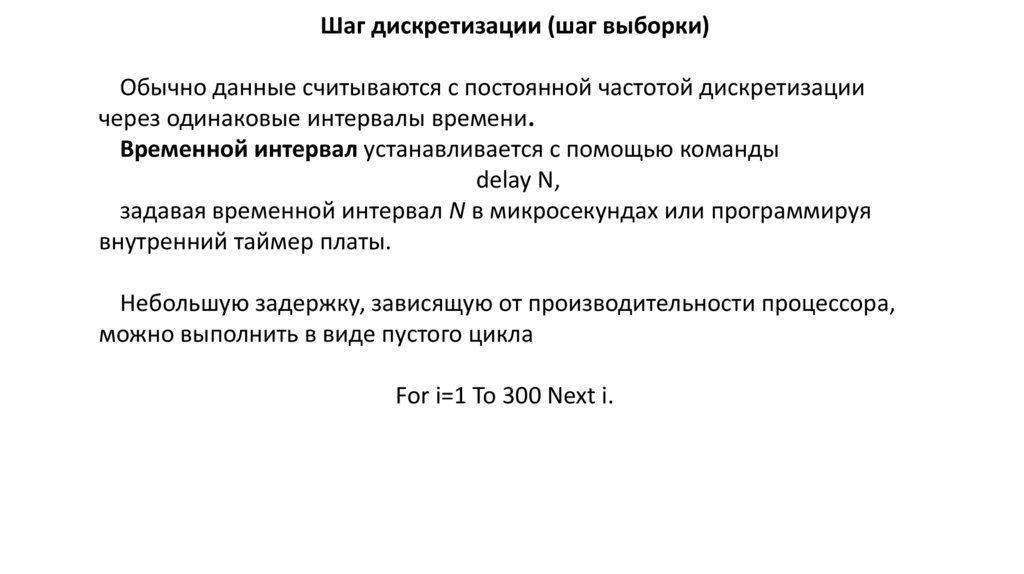
30.
Шаг дискретизации (шаг выборки)Обычно данные считываются с постоянной частотой дискретизации
через одинаковые интервалы времени.
Временной интервал устанавливается с помощью команды
delay N,
задавая временной интервал N в микросекундах или программируя
внутренний таймер платы.
Небольшую задержку, зависящую от производительности процессора,
можно выполнить в виде пустого цикла
For i=1 To 300 Next i.
31.
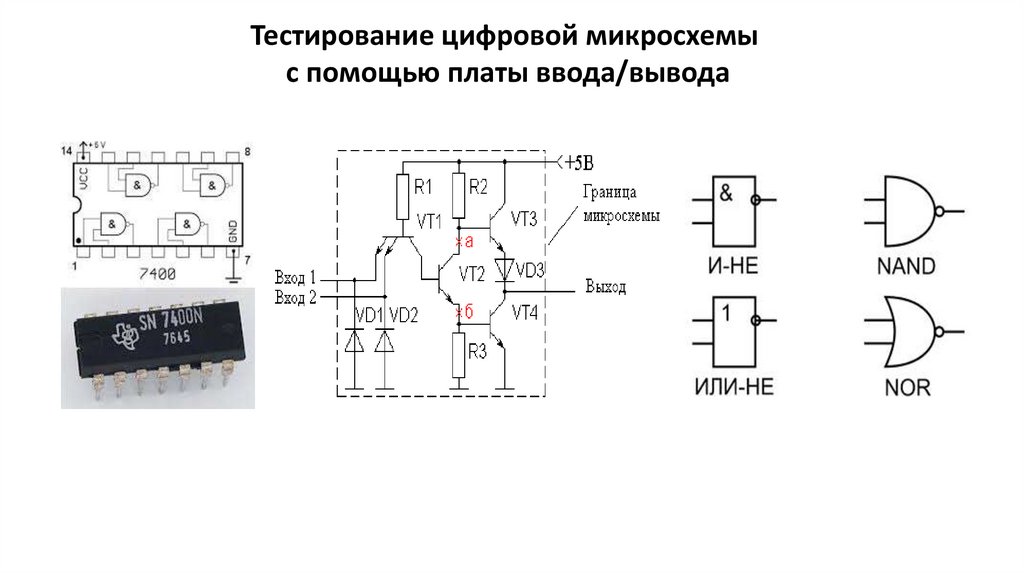
Тестирование цифровой микросхемыс помощью платы ввода/вывода
32.
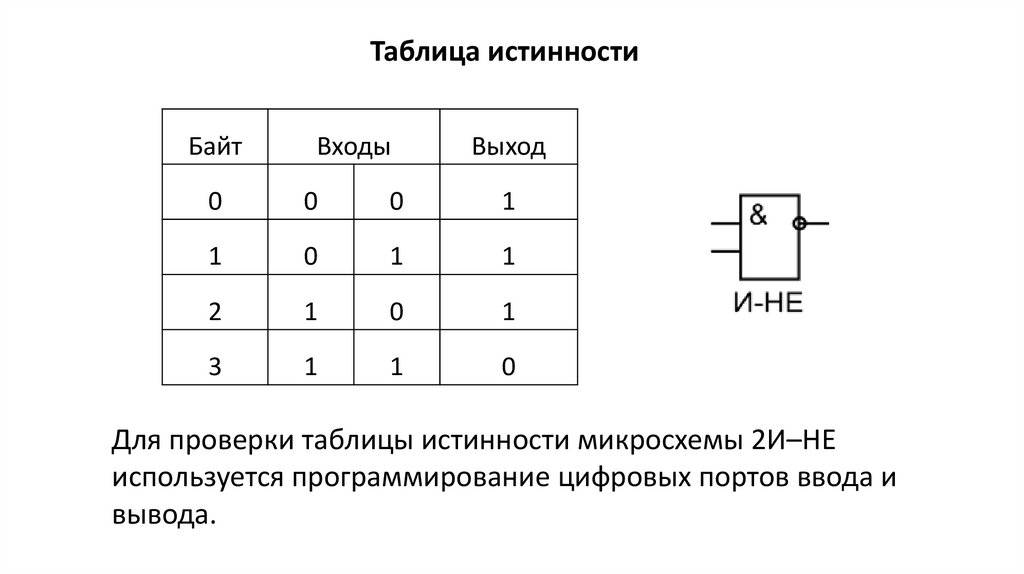
Таблица истинностиБайт
Входы
Выход
0
0
0
1
1
0
1
1
2
1
0
1
3
1
1
0
Для проверки таблицы истинности микросхемы 2И–НЕ
используется программирование цифровых портов ввода и
вывода.
33.
Схема соединения цифровых портов ввода и вывода слогическим элементом 2И–НЕ цифровой микросхемы
34.
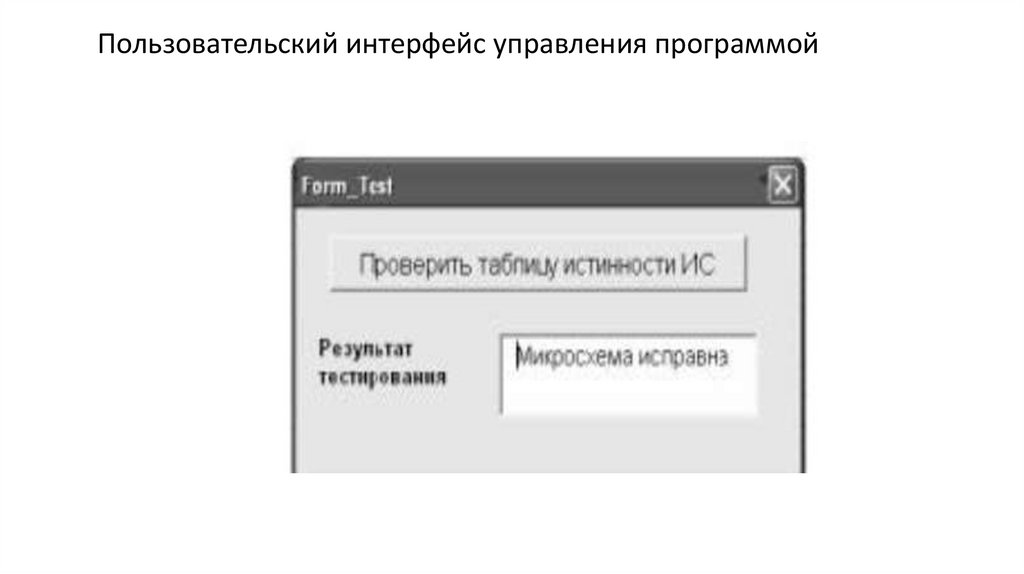
Пользовательский интерфейс управления программой35.
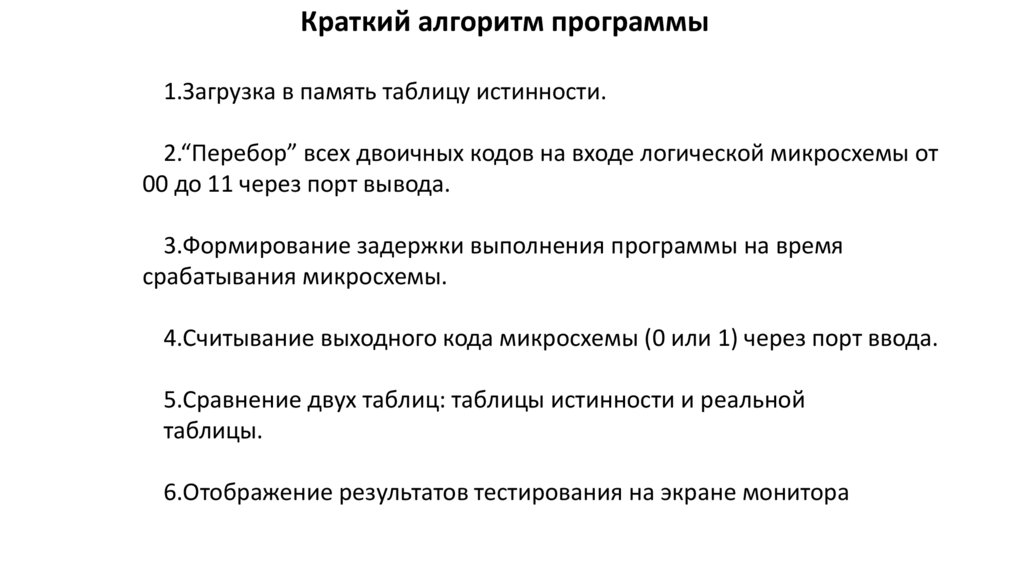
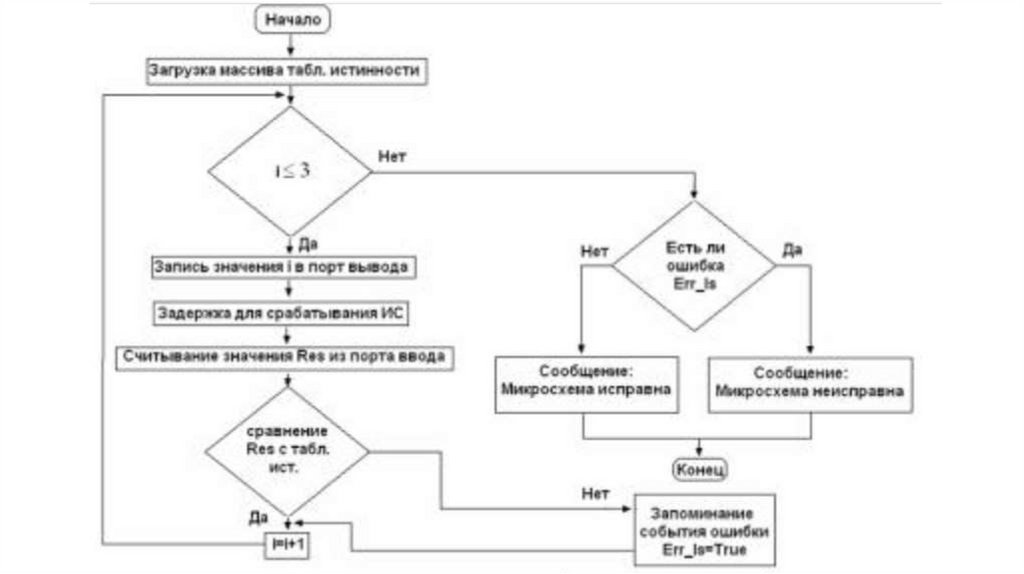
Краткий алгоритм программы1.Загрузка в память таблицу истинности.
2.“Перебор” всех двоичных кодов на входе логической микросхемы от
00 до 11 через порт вывода.
3.Формирование задержки выполнения программы на время
срабатывания микросхемы.
4.Считывание выходного кода микросхемы (0 или 1) через порт ввода.
5.Сравнение двух таблиц: таблицы истинности и реальной
таблицы.
6.Отображение результатов тестирования на экране монитора
36.
37.
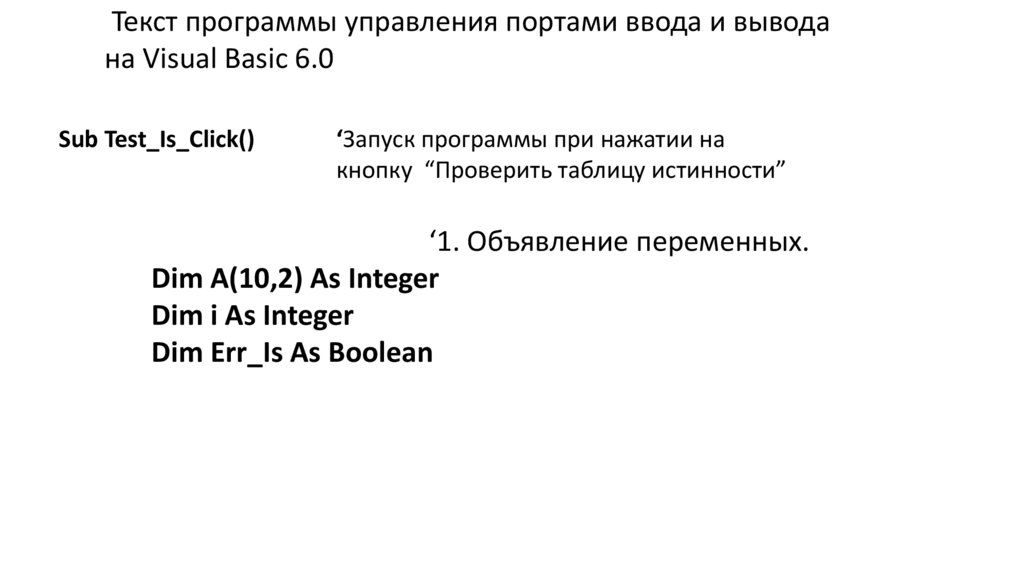
Текст программы управления портами ввода и выводана Visual Basic 6.0
Sub Test_Is_Click()
‘Запуск программы при нажатии на
кнопку “Проверить таблицу истинности”
‘1. Объявление переменных.
Dim A(10,2) As Integer
Dim i As Integer
Dim Err_Is As Boolean
38.
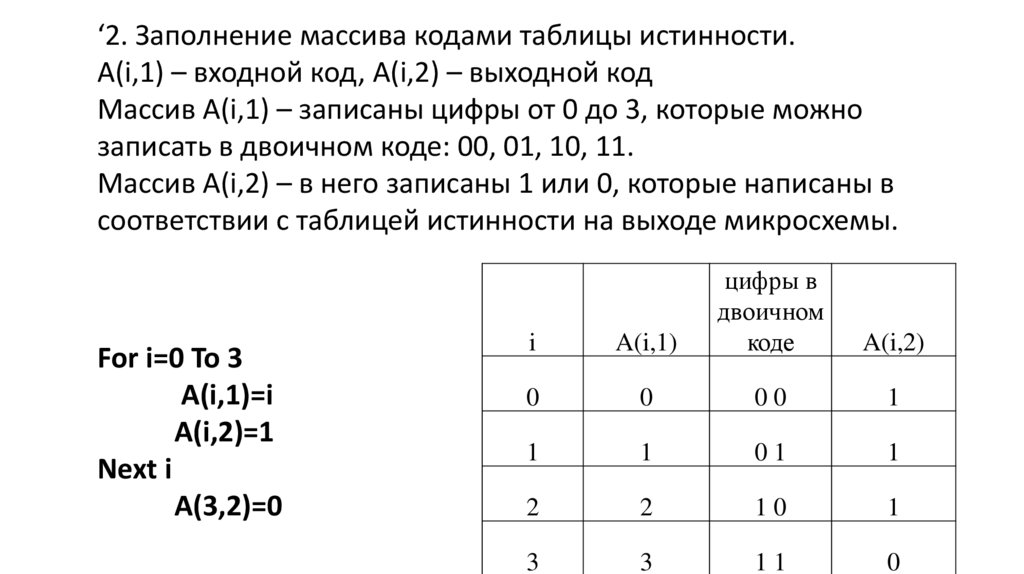
‘2. Заполнение массива кодами таблицы истинности.A(i,1) – входной код, A(i,2) – выходной код
Массив A(i,1) – записаны цифры от 0 до 3, которые можно
записать в двоичном коде: 00, 01, 10, 11.
Массив A(i,2) – в него записаны 1 или 0, которые написаны в
соответствии с таблицей истинности на выходе микросхемы.
For i=0 To 3
A(i,1)=i
A(i,2)=1
Next i
A(3,2)=0
i
A(i,1)
цифры в
двоичном
коде
0
0
00
1
1
1
01
1
2
2
10
1
3
3
11
0
A(i,2)
39.
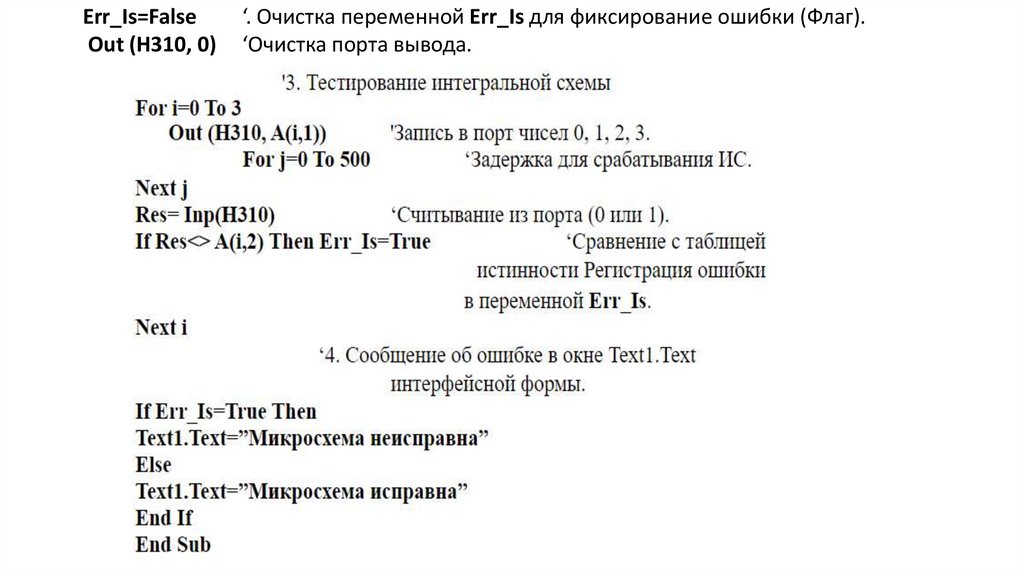
Err_Is=FalseOut (H310, 0)
‘. Очистка переменной Err_Is для фиксирование ошибки (Флаг).
‘Очистка порта вывода.
40.
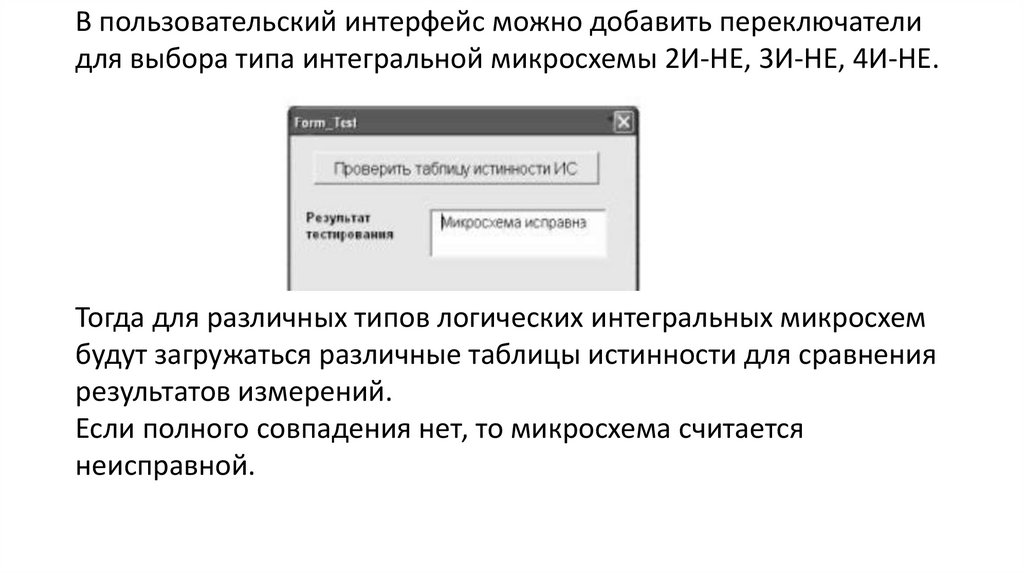
В пользовательский интерфейс можно добавить переключателидля выбора типа интегральной микросхемы 2И-НЕ, 3И-НЕ, 4И-НЕ.
Тогда для различных типов логических интегральных микросхем
будут загружаться различные таблицы истинности для сравнения
результатов измерений.
Если полного совпадения нет, то микросхема считается
неисправной.