


")










 geography
geographySimilar presentations:










Фотограмметрическая обработка аэрокосмической информации
1. Фотограмметрическая обработка аэрокосмической информации
кафедра фотограмметрииФотограмметрическая обработка
аэрокосмической информации
Лекция 5
ПОЛУЧЕНИЕ ЦИФРОВОЙ И ГРАФИЧЕСКОЙ
ИНФОРМАЦИИ ОБ ОБЪЕКТЕ ПО СНИМКАМ
Литература:
1. Б.В. Краснопевцев ФОТОГРАММЕТРИЯ
http://миигаик.рф/upload/iblock/eec/eec5799a3ead6011d48e5c3c2e4a7f2c.pdf
2. Рекомендации по контролю точности Photomod
https://racurs.ru/upload/iblock/09a/Accuracy_rus.pdf
3. ГКИНП (ГНТА)-02-036-02 Инструкция по фотограмметрическим работам при создании
цифровых топографических карт и планов
4. Инструкция Photomod по созданию ЦМР. https://racurs.ru/upload/medialibrary/pdf/DEM.pdf
5. https://fb.ru/article/457808/tsifrovaya-model-relefa-opisanie-tipyi-vidyi-postroenie
доцент кафедры Даргель Александр Витальевич
2. Технологическая схема фотограмметрической обработки стереопары
Формирование файлапараметров фотокамеры
Формирование файла
опорной информации
Формирование проекта
на компьютере
Введение снимков
в компьютер
Преобразование
фотоснимков в цифровую
форму на сканере
Получение исходных
материалов
Подготовительные работы
Если на ЦФС предусмотрен весь комплекс работ по
обработке снимков, то после построения
фототриангуляции для каждого снимка получают
элементы ориентирования. В этом случае
ориентирование стереопар не выполняют, а сразу
приступают к съёмке рельефа и контуров.
Исходные материалы:
-
Построение и ориентирование модели объекта
Внутреннее ориентирование снимков
-
Взаимное ориентирование снимков
(построение модели объекта)
-
Внешнее ориентирование модели
-
Съемка рельефа
Построение
Трассирование
цифровой модели
горизонталей
рельефа
Съемка контуров и
камеральное дешифрирование
-
Построение горизонталей
и редактирование их
положений
-
Цифровая карта
Рис. 8.1
-
материалы наземной, аэро- или космической
съёмки;
паспортные данные фотокамеры (f, коорд. метки,
дисторсия и др.);
значение высоты фотографирования над
средней плоскостью участка местности или
значение среднего масштаба снимков;
элементы внешнего ориентирования снимков
(или бортовые или после фототриангуляции)
материалы планово-высотной подготовки
снимков;
материалы полевого и камерального
дешифрирования;
редакционные указания и ведомственные
материалы картографического назначения;
уточнённые фотосхемы или снимки,
увеличенные до масштаба составляемой карты;
3. Построение и ориентирование модели объекта
Внутреннее ориентирование снимковДля аналоговых снимков, переведенных в
цифровую форму:
измерение координат координатных меток для
определения положения систем координат
каждого снимка в системе координат прибора
допустимое значение максимальной ошибки
не должно превышать размер пиксела
Для изображений, полученных цифровой
камерой, внутреннее ориентирование
выполняется в автоматическом режиме и
сводится к вводу элементов внутреннего
ориентирования из паспорта камеры
4. Взаимное ориентирование снимков (построение модели объекта)
- измерение связующих точек на стереопарах и в зонахтройного перекрытия;
- измерение межмаршрутных связующих точек;
- распознавание и измерение опорных точек.
Схема расположения стандартных зон
При определении элементов взаимного
ориентирования оптимальным вариантом
считается измерение 12-18 связующих точек на
стереопаре (по 2-3 точки в каждой из 6
стандартных зон, если измерения выполняются
вручную.
При автоматическом измерении связующих
точек мы можем задавать большее количество
точек для измерения на каждой стереопаре, и
за счет этого равномерно распределять их по
области перекрытия с учетом особенностей
снимаемого объекта.
5. Измерение связующих точек в автоматическом режиме
Настройки накидного монтажаПриемлемое значение коэффициента корреляции
определяется пользователем, исходя из
фотографического качества снимков.
Для контрастных и четких снимков это значение
составляет 0,9 — 0,95, для снимков с большим смазом
допустимое значение коэффициента может быть 0,80 на
хорошо распознаваемых точках.
Настройки параметров для автоматического
измерения связующих точек
6. Контроль качества взаимного ориентирования
по остаточным поперечным параллаксам: средняя ошибка не должнапревышать половины размера пиксела сканирования для аналоговой камеры и
половины размера пиксела матрицы для цифровой камеры
по плановым и высотным ошибкам на точках в области тройного и более
перекрытия: средние ошибки в плане и по высоте:
Exy ср = √2 · 0,5пикс; Ez ср = f/b · Exy ср
Приблизительное значение базиса фотографирования можно рассчитать по
формулам:
1) bx=lx·(100%-px)/100%
где bx — базис фотографирования в масштабе снимка (мм);
lx — размер снимка вдоль оси X (мм);
px — продольное перекрытие в % (в общем случае 60%).
2) bx = xлев — xправ, где xлев и xправ — координаты связующей точки на
левом и правом снимке (мм)
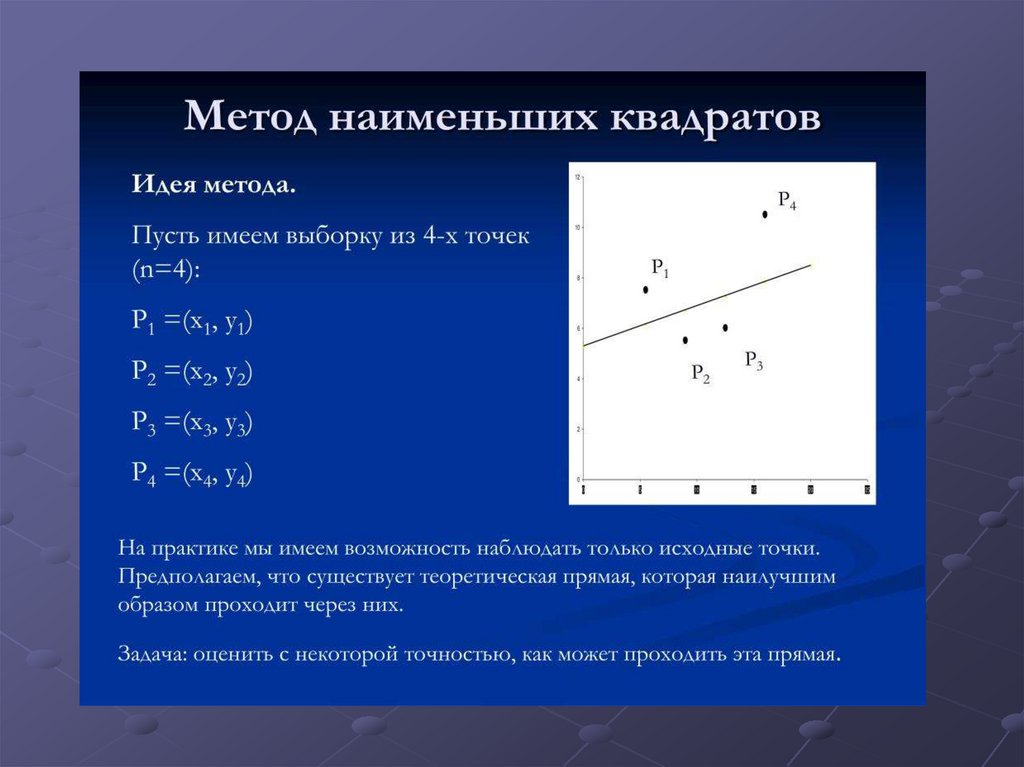
7. Внешнее ориентирование модели
Построенная в ходе взаимного ориентирования геометрическая модельобъекта имеет масштаб, отличный от требуемого, и произвольную
угловую ориентацию в координатной системе объекта.
Чтобы привести модель к нужному масштабу и правильно
сориентировать, необходимо иметь минимум три опорные точки с
известными в системе координат объекта координатами.
Для контроля берут четвёртую опорную точку. Точки должны
располагаться в углах рабочей площади стереопары. Наличие большего
числа опорных точек позволяет повысить точность внешнего
ориентирования модели и выполнить вычисления с использованием
метода наименьших квадратов.
8.
9. контроль внешнего ориентирования модели
из ГКИНП (ГНТА)-02-036-02 «Инструкция пофотограмметрическим работам при создании цифровых
топографических карт и планов»
Внешнее ориентирование модели считается законченным, когда средние остаточные расхождения
плановых координат и высот на опорных и контрольных точках станут меньше указанных величин
10. Цифровая модель рельефа местности
Матрицей высот (DEM — Digital Elevation Model) — называют цифровоекартографическое представление земной поверхности в виде регулярной
сетки значений высот.
11. принцип съемки рельефа по стереопаре
12.
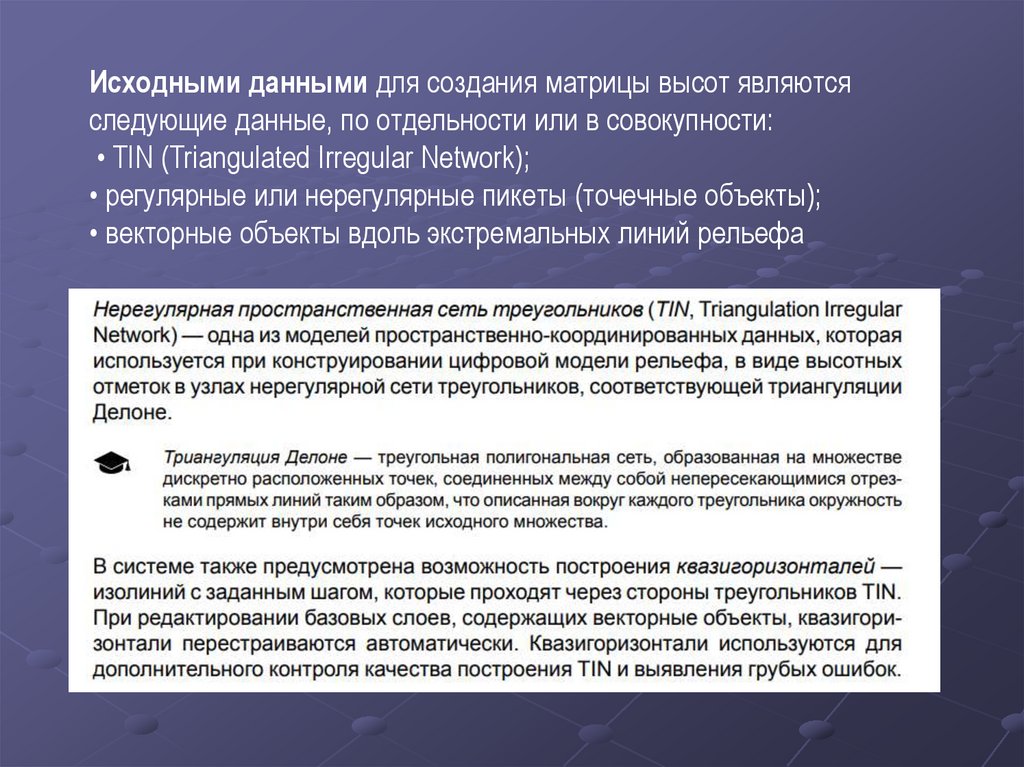
Исходными данными для создания матрицы высот являютсяследующие данные, по отдельности или в совокупности:
• TIN (Triangulated Irregular Network);
• регулярные или нерегулярные пикеты (точечные объекты);
• векторные объекты вдоль экстремальных линий рельефа
13. TIN модель
14.
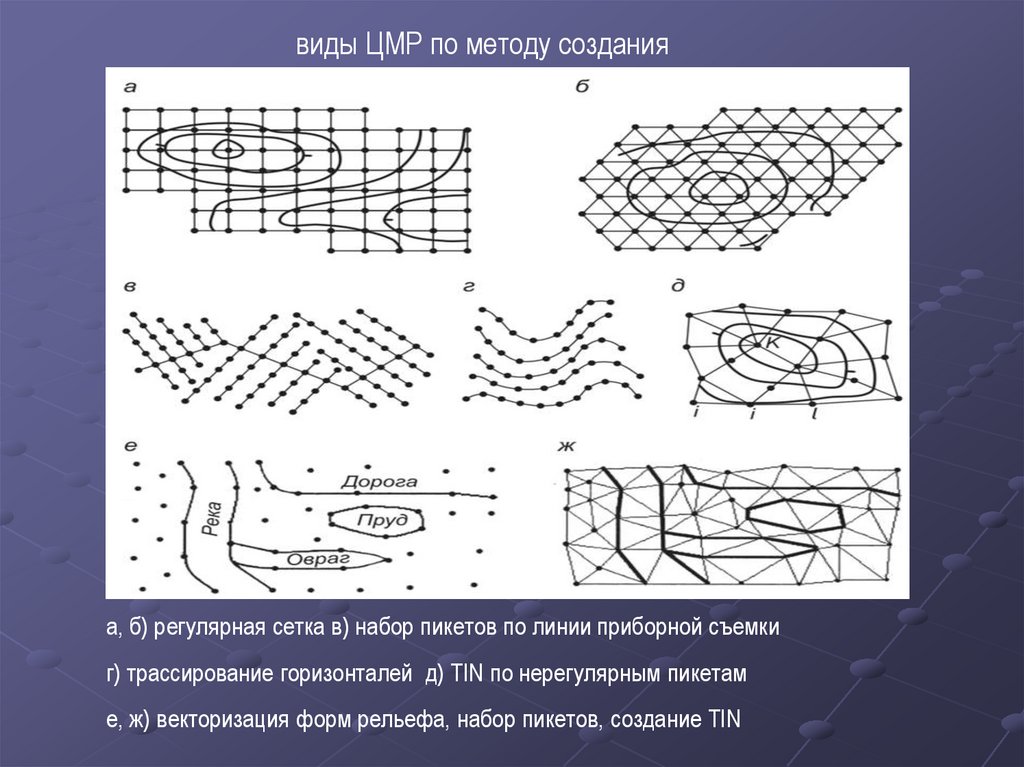
виды ЦМР по методу созданияа, б) регулярная сетка в) набор пикетов по линии приборной съемки
г) трассирование горизонталей д) TIN по нерегулярным пикетам
е, ж) векторизация форм рельефа, набор пикетов, создание TIN
15.
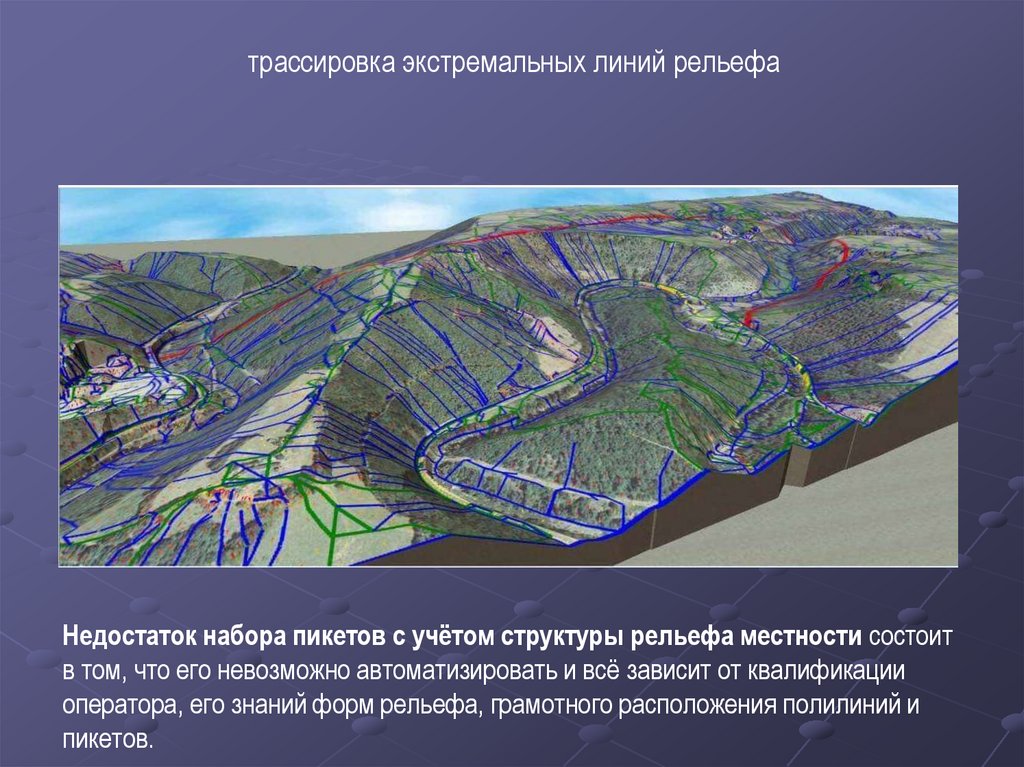
трассировка экстремальных линий рельефаНедостаток набора пикетов с учётом структуры рельефа местности состоит
в том, что его невозможно автоматизировать и всё зависит от квалификации
оператора, его знаний форм рельефа, грамотного расположения полилиний и
пикетов.
16. трассирование горизонталей
Трассирование горизонталей позволяет получить послойное расположение пикетов, которые в каждомслое имеют одну и ту же высоту и похожее изменение их плановых положений.
Чтобы выполнить трассирование горизонтали оператор устанавливает измерительную марку на высоту
горизонтали и перемещает её вдоль поверхности. После выполнения трассирования всех горизонталей
получают пирамидальное расположение слоёв пикетов с равным отстоянием по высоте друг от друга.
В результате создаётся цифровая модель рельефа местности, по которой легко получить модель
рельефа местности в графической форме. Интерполируя между ближними точками соседних
горизонталей можно вычислить высоты точек, расположенных между этими горизонталями.
Однако этот способ
утомительный, т.к. требует от
оператора постоянного
внимательного наблюдения
за движением марки. В связи
с этим трассирование
горизонталей целесообразно
использовать, когда в
пределах стереопары
перепад высот такой, что
нужно провести 3-5
горизонталей.
17.
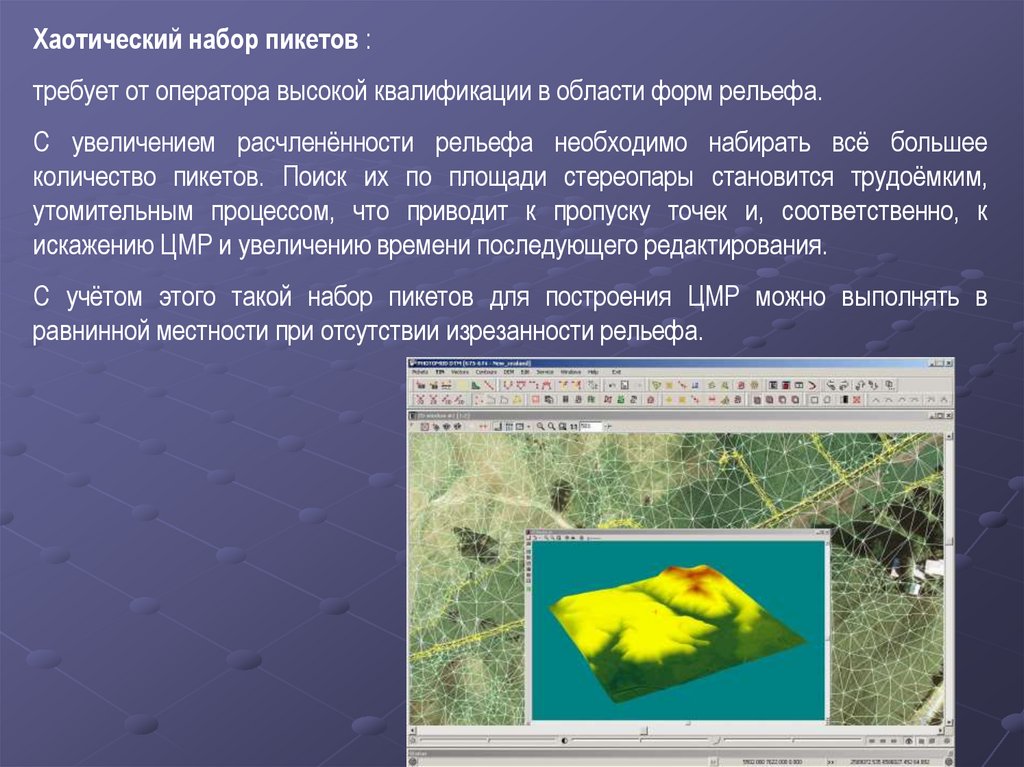
Хаотический набор пикетов :требует от оператора высокой квалификации в области форм рельефа.
С увеличением расчленённости рельефа необходимо набирать всё большее
количество пикетов. Поиск их по площади стереопары становится трудоёмким,
утомительным процессом, что приводит к пропуску точек и, соответственно, к
искажению ЦМР и увеличению времени последующего редактирования.
С учётом этого такой набор пикетов для построения ЦМР можно выполнять в
равнинной местности при отсутствии изрезанности рельефа.
18.
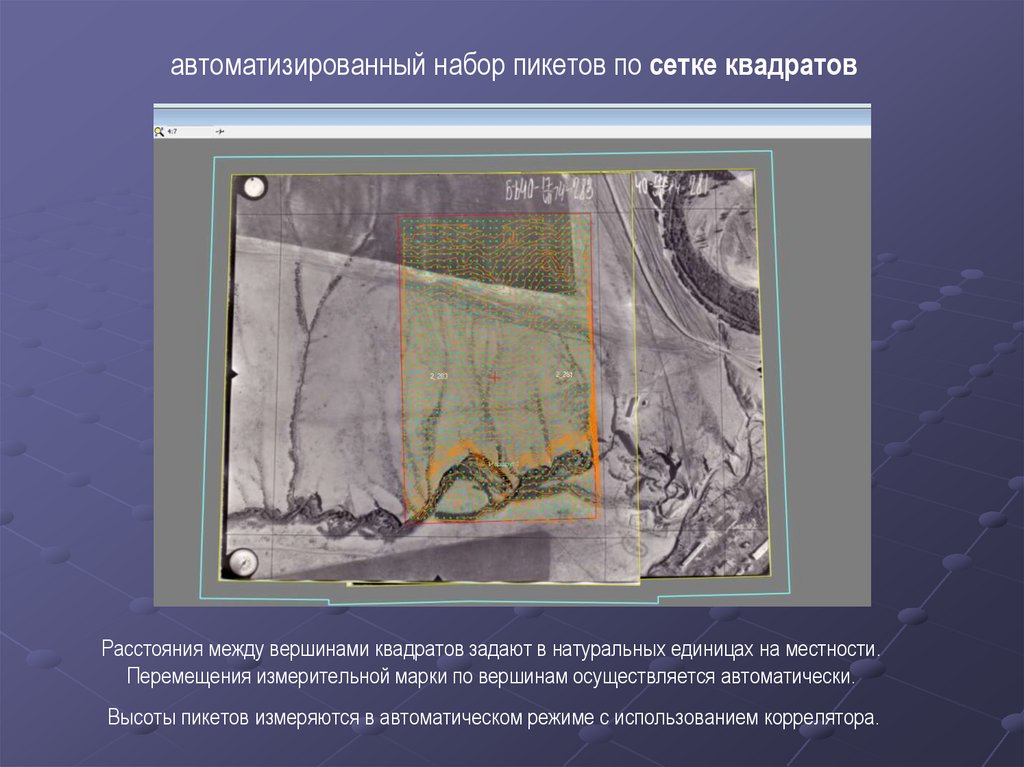
автоматизированный набор пикетов по сетке квадратовРасстояния между вершинами квадратов задают в натуральных единицах на местности.
Перемещения измерительной марки по вершинам осуществляется автоматически.
Высоты пикетов измеряются в автоматическом режиме с использованием коррелятора.
19. редактирование пикетов
Вводят поправки в высотноеположение измерительной марки,
если она попадает на крыши
домов, вершины растительности
или водные поверхности.
Если с крыши дома легко
переместить марку на
поверхность рядом с домом, то в
лесном массиве, чтобы опустить
её на поверхность нужно знать
высоту деревьев.
Если же марка попала на водную
поверхность, то её нужно
установить на высоте
ближайшего участка берега.
20.
Особенности автоматизированного набора пикетовПри использовании коррелятора следует учитывать, что он даёт хороший результат на
открытой местности при отсутствии лесных участков, многоэтажной застройки и водных
пространств.
Коррелятор даёт плохие результаты на мало контурной местности, например луг, песок,
вода, т.к. в этом случае ему трудно по перемене плотности изображения найти две
соответственные (одноимённые) точки.
В связи с этим при использовании коррелятора приходится тратить много времени на
редактирование полученных измерений, хотя имеются автоматические режимы
отфильтровывания грубых измерений.
Недостатком набора пикетов по сетке квадратов является то, что положения пикетов не
полностью учитывают характер рельефа местности.
Чтобы ослабить этот недостаток, расстояния между вершинами квадратов подбирают с
учётом расчленённости рельефа, а также заданного на создаваемой карте сечения
рельефа горизонталями.
хотя и задаётся вначале сетка квадратов, но в результате выполнения перечисленных
выше действий плановые положения пикетов не совпадают с вершинами квадратов и,
следовательно, расположение пикетов носит нерегулярный характер
21.
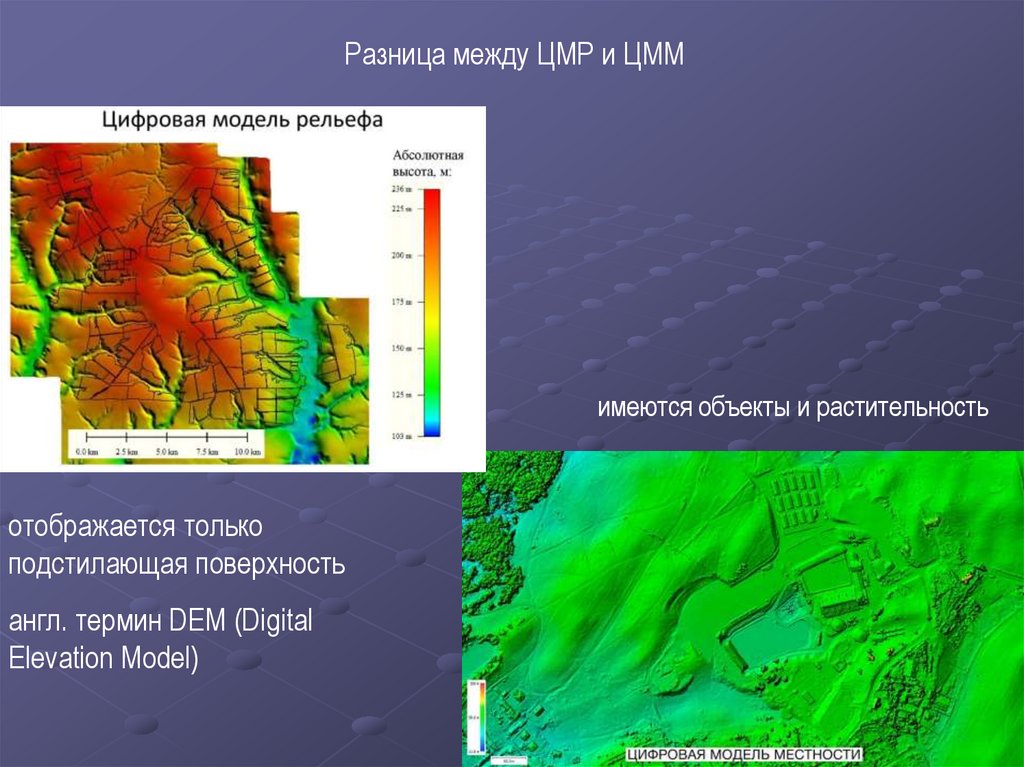
Разница между ЦМР и ЦММимеются объекты и растительность
отображается только
подстилающая поверхность
англ. термин DEM (Digital
Elevation Model)
22.
Автоматическое построение горизонталей по ЦМР основано налинейном интерполировании между ближайшими точками и определении
положения точек с заданной высотой.
Картографическое изображение рельефа местности горизонталями
предполагает зависимость высоты точки от её плановых координат:
Z = F (X, Y).
Следовательно, поиск положения горизонтали сводится к поиску
плановых координат точек с одинаковой высотой путём интерполирования
между ближайшими точками сетки, и поиска точек "входа-выхода"
горизонтали из неё.
При этом точки "входа-выхода" должны быть согласованы с такими же
точками, найденными в соседних ячейках, где данная горизонталь
проходит.
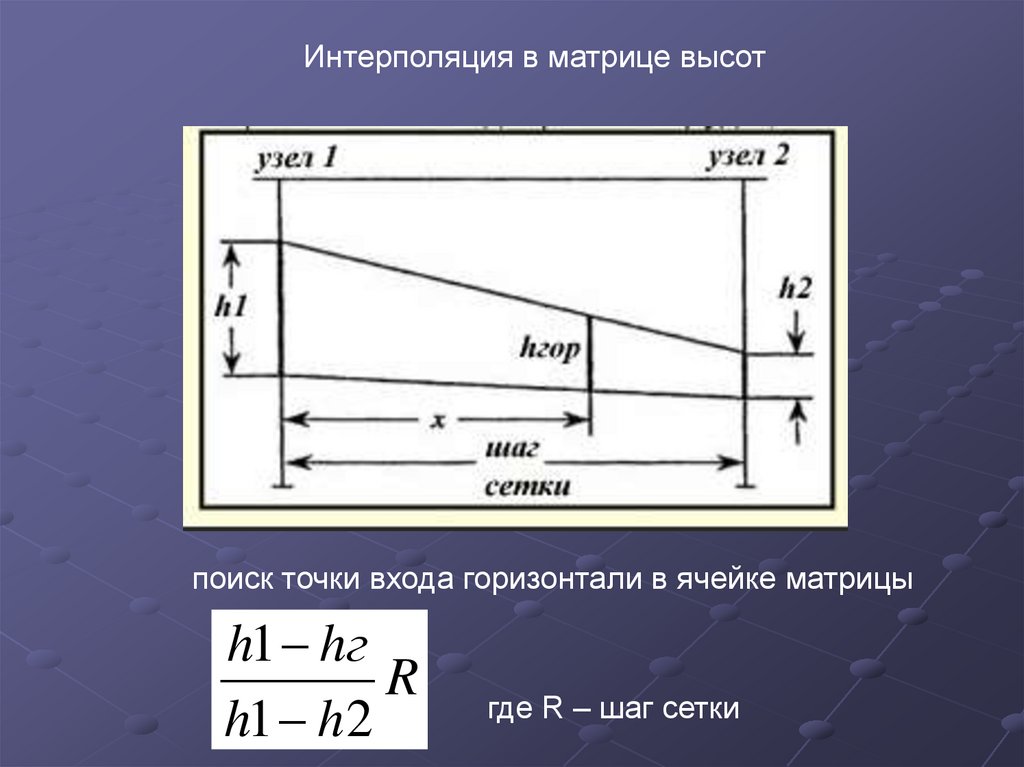
23.
Интерполяция в матрице высотпоиск точки входа горизонтали в ячейке матрицы
h1 hг
R
h1 h 2
где R – шаг сетки
24. примерные вопросы на тестировании
вид модели рельефа по методу созданиячто нужно знать для определения превышения точки
a над точкой b по стереопаре.
элементы внутреннего ориентирования камеры
элементы внешнего ориентирования снимка
способы просмотра стереоизображений
виды фототриангуляции
формула определения высоты фотографирования
над средней плоскостью по фокусному расстоянию и
масштабу снимка
минимальное количество опорных точек для
ориентирования стереомодели