


























































































 electronics
electronicsSimilar presentations:










Проектирование ЛПУ АЭП
1.
ПРАКТИЧЕСКОЕЗАДАНИЕ
№ 1
«РАСЧЁТ, ВЫБОР,
ПРОЕКТИРОВАНИЕ ЭПРСУ АЭП
ПОТОЧНО-ТРАНСПОРТНОЙ СИСТЕМЫ»
«ПРОЕКТИРОВАНИЕ ЛПУ АЭП»
2.
ОСНОВНЫЕ ВИДЫ конвейеров (транспортёров) в промышленности:- ленточные,
- цепные,
- скребковые,
- роликовые,
- винтовые
- шнековые
П
Т
С
Средняя скорость движения
обычно составляет от 0,8 до 2 м/с.
ленты
ленточных
конвейеров
Скорость движения скребковых и цепных транспортёров
непрерывного действия составляет от 0,15 до 0,8 м/с, транспортных
до 3 м/с.
Производительность конвейеров в основном зависит от
скорости движения исполнительного (рабочего) органа
(ленты, ролика, винта и т.д.) и его размеров.
3.
4.
5.
Мощность двигателя (кВт) ленточных конвейеров с учётом конструктивныхособенностей (параметров) определяется по формуле
где
А – коэффициент холостого хода ленты
В – коэффициент груза
С – коэффициент сбрасывателя;
L1 – длина конвейера между барабанами, м;
L2 – длина перемещения груза на конвейере, м;
Н – высота подъёма груза, м;
Q – производительность конвейера, т/ч;
V – скорость движения ленты, м/с;
k1
–
коэффициент,
учитывающий
дополнительные
потери
мощности (при длине конвейера до 15 метров – k1 =
1,2; до 30 метров - k1 = 1,1; до 45 метров - k1 = 1,06;
свыше 45 метров – k1 = 1,0);
k2
–
коэффициент,
учитывающий
увеличение
сопротивления
при пуске (значение k2 принимается равным от 1,2 до 1,5);
η – КПД передачи.
6.
Мощностьэлектропривода
(кВт)
горизонтальных
ленточных
конвейеров без промежуточных сбрасывателей определяется по формуле
где
Q – производительность конвейера, т/ч;
50 т/ч.
L – длина конвейера (транспортёра), м;
20 м.
kF – коэффициент трения в подшипниках (для подшипников
скольжения kF = 0,1, для подшипников качения kF = от
0,01 до 0,05);
0,03
- коэффициент полезного действия передачи.
0,95
( 50 20 0 ,03 )
Р
0 ,086 кВт
367 0 ,95
?
50 20 ( 0 ,03 30 )
Р
2 ,58 кВт
367
0
,
95
IM3
IM1
IM2
7.
Мощность электропривода (кВт) ленточных наклонных конвейеровбез сбрасывателей определяется по формуле
где
kЗ – коэффициент запаса: kЗ = 1,1 ÷ 1,25;
Q – производительность конвейера, т/ч;
L – расстояние между осями концевых барабанов конвейера, м;
k0 – опытный коэффициент, определяемый по справочным таблицам;
Н – высота подъёма груза, м.
8.
ПРИНЦИПЫУПРАВЛЕНИЯ
ЭП
ПОТОЧНОТРАНСПОРТНЫХ
СИСТЕМ
9.
НА ПРАКТИКЕ, при проектировании систем (схем)управления
ЭП
конвейерных
линий
и
поточнотранспортных систем, практически всегда, учитываются
ШЕСТЬ ОСНОВОПОЛАГАЮЩИХ ПРИНЦИПОВ (УСЛОВИЙ):
1. ЭРПСУ должны предусматриваться следующие режимы ЭП:
а) ручной (рабочий) / автоматический;
б) местный / наладочный;
МНОГОРЕЖИМНОСТЬ
РАБОТЫ ЭП ПТС
в) режим отдыха (блокирования работы);
2. запуск звеньев (секций) конвейера в рабочем режиме
должен производиться последовательно в направлении от конца
конвейера к его началу (чаще всего с задержкой включения, пуска).
ЦЕЛЬ – избежание завала конвейера материалом в случае
отказа какого-либо звена (секции) или ЭП секции, …?…?... ;
НК
КК
10.
3. отключение (останов) работающего конвейера (секций)должно производиться последовательно в направлении от начала
конвейера к его концу;
ЦЕЛЬ? ЦЕЛЬ – избежание завала конвейера материалом в случае
отказа какого-либо звена (секции) или ЭП секции и разгрузка секций
перед повторным включением секций в работу;
(рекомендуемая циклограмма отключения ЭП последующих секций с задержкой времени
относительно момента отключения ЭП предыдущей секции)
НК
КК
4. перед пуском конвейера в работу (особенно в
автоматическом
режиме)
необходимо
обеспечить
подачу
предупредительных сигналов оповещения (наличие световой и
звуковой сигнализации);
11.
5. при работе конвейера в автоматическом режиме в случаеостановки какого-либо звена (секции), все звенья, участвующие в
подаче материала на поврежденное звено, должны автоматически
отключаться, а звенья (секции), участвующие в отводе материала от
поврежденного звена (секции), должны продолжать работу;
НК
КК
авария останов
6. в случае возникновения аварийной ситуации должна быть
предусмотрена возможность отключения конвейера с любого места
нахождения технологического персонала (или нескольких мест).
SQ1
SB1
Тросовая
защита
SB2
SQ3
SQ2
SB3
SQ4
12.
ЗАДАНИЕ № 1.0ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЁТА:
- ТИП ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ –
- пот очно-т ранспорт ная сист ема (ПТС);
- ПОДВИД ПТС –
- лент очный односекционный реверсивный конвейер;
- ТИП ЭП ПТС –
- трёхфазный АД с короткозамкнутым ротором (АД с к.з.р.);
- НОМИНАЛЬНАЯ МОЩНОСТЬ ПРИВОДА, кВт –
СУММА = 2 ÷ 43 кВт
- дата (число) дня рождения студента (1 ÷ 31)
+
- порядковый номер месяца рождения студента (1 ÷ 12);
- СИНХРОННАЯ ЧАСТОТА ВРАЩЕНИЯ ЭП ПТС –
- месяц рождения разработчика;
- нечётные месяцы (варианты) – 1500 мин-1;
- чётные месяцы (варианты) – 3000 мин-1.
13.
1.1 Произвести выбор электродвигателя из каталога (любогопроизводителя), который соответствует исходным данным задания
- трёхфазный,
- АД,
- с короткозамкнутым ротором,
- номинальная мощность,
- синхронная частота вращения ротора двигателя ).
Серия и типоразмер АД ( например - 5А200L4)
Технические характеристики АД. / Фиксация параметров /
!!! В случае отсутствия в каталогах значения стандартной
мощности
электродвигателя
равной
мощности
по
заданию,
производится выбор электродвигателя с
БЛИЖАЙШЕЙ БОЛЬШЕЙ СТАНДАРТНОЙ МОЩНОСТЬЮ при
заданной частоте вращения ротора электрического двигателя.
14.
ГОСТ 10683 – 73МАШИНЫ ЭЛЕКТРИЧЕСКИЕ.
НОМИНАЛЬНЫЕ ЧАСТОТЫ ВРАЩЕНИЯ И ДОПУСКАЕМЫЕ ОТКЛОНЕНИЯ
Синхронные частоты вращения ( n1 ) асинхронных двигателей при частоте (f )
питающего напряжения 50 Гц –
3000; 1500; 1000; 750; 600; 500; 375; 300; 250; 187,5; 166,6; 150; 125; 100.
(мин-1)
число пар полюсов
60 f
n1
p
частота
питающего U
в РФ f = 50 Гц
ГОСТ 12139 – 84
МАШИНЫ ЭЛЕКТРИЧЕСКИЕ ВРАЩАЮЩИЕСЯ.
РЯДЫ НОМИНАЛЬНЫХ МОЩНОСТЕЙ, НАПРЯЖЕНИЙ и ЧАСТОТ
Номинальные мощности трёхфазных электрических асинхронных
двигателей при напряжении питания 380 В и частоте питающего напряжения
50 Гц –
… 0,12; 0,18; 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 3,7; 4,0; 5,5; 6,3; 7,5;
11,0; 15,0; 18,5; 22; 30; 37; 45; 55; 63; 75; 90; 110; 132; 150; 160; 185; 200;
220; 250; 280; 300; 315; 335; 355; 375; 400 … кВт.
15.
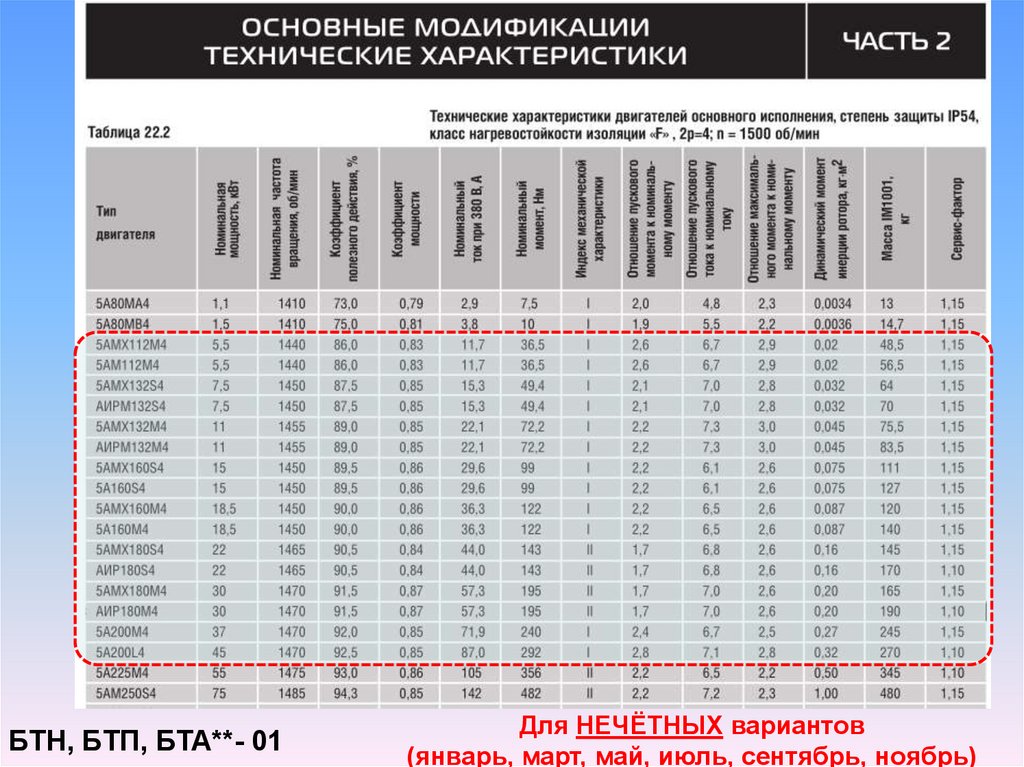
ББЖ, БТО, БАТ** - 01Для НЕЧЁТНЫХ вариантов
(январь, март, май, июль, сентябрь, ноябрь)
16.
ББЖ, БТО, БАТ** - 01Для ЧЁТНЫХ вариантов
(февраль, апрель, июнь, август, октябрь, декабрь)
17.
БТН, БТП, БТА**- 01Для НЕЧЁТНЫХ вариантов
(январь, март, май, июль, сентябрь, ноябрь)
18.
БТН, БТП, БТА**- 01Для ЧЁТНЫХ вариантов
(февраль, апрель, июнь, август, октябрь, декабрь)
19.
Пример расчёта параметров и построение механической характеристикиэлектрического двигателя 5А200L4
Рн
n2
н cos н
Iн
Mн
mП
ki
mКР J= mr2
ОПРЕДЕЛЕНИЕ И ПРОВЕРКА ТАБЛИЧНЫХ КАТАЛОЖНЫХ ДАННЫХ
ОСНОВНЫХ ПАРАМЕТРОВ ЭП РАСЧЁТНЫМ СПОСОБОМ,
НЕОБХОДИМЫХ ДЛЯ РАСЧЁТА И ПОСТРОЕНИЯ МХ ЭП
1. Проверка / расчёт
величины номинального
тока Iн
IН
РН
45000
87,06 A
3 U Н cos H H 1,73 380 0,85 0,925
2. Расчёт величины пускового тока IП
I П k i I Н 7 ,1 87 618 А
20.
Определение и проверка табличных каталожных данных основных параметров ЭПрасчётным способом, необходимых для расчёта и построения МХ ЭП
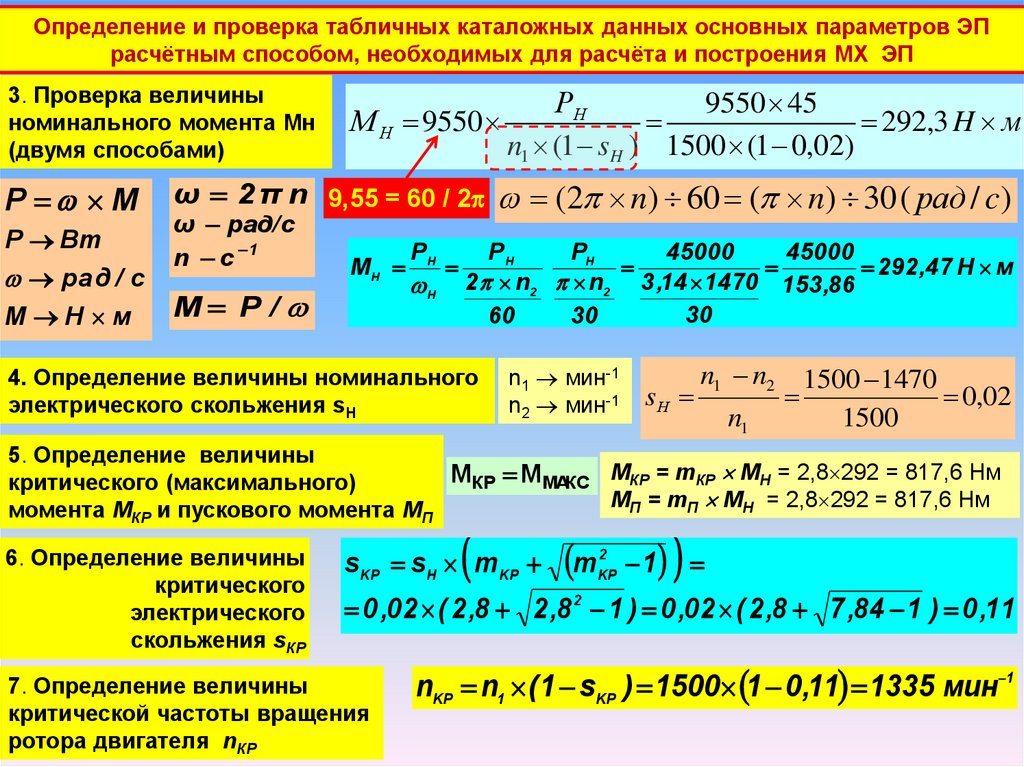
3. Проверка величины
номинального момента Мн
(двумя способами)
Р М
Р Вт
рад / с
М Н м
М Н 9550
РН
9550 45
292,3 H м
n1 (1 s H ) 1500 (1 0,02)
ω 2 π n 9,55 = 60 / 2 (2 n) 60 ( n) 30 ( рад / c)
ω рад/c
n c 1
MН
М Р /
РН
H
РН
PH
45000
45000
292,47 Н м
2 n2 n2 3 ,14 1470 153,86
30
60
30
4. Определение величины номинального
электрического скольжения sН
n1 мин-1
n2 мин-1
sН
n1 n2
n1
1500 1470
0,02
1500
5. Определение величины
МКР ММАКС МКР = mКР MH = 2,8 292 = 817,6 Hм
критического (максимального)
МП = mП MH = 2,8 292 = 817,6 Hм
момента МКР и пускового момента МП
6. Определение величины
критического
электрического
скольжения sКР
sKP s H mKP
m 1
2
KP
0 ,02 ( 2 ,8 2 ,8 2 1 ) 0 ,02 ( 2 ,8 7 ,84 1 ) 0 ,11
7. Определение величины
критической частоты вращения
ротора двигателя nКР
nKP n1 ( 1 sKP ) 1500 1 0 ,11 1335 мин 1
21.
Сервис-фактор. Допустимая перегрузка электродвигателя приноминальном напряжении и частоте переменного тока.
При этом превышение температуры обмотки не должно быть более
допустимого, для данного класса нагревостойкости изоляции, более чем на 10 %.
Наличие (знание, указание) сервис-фактора дает возможность:
продлить срок эксплуатации электродвигателя, избежав отказов (поломок)
при его эксплуатации в системах с высоким риском чрезмерных перегрузок;
избежать переустановленной (увеличенной) мощности для двигателей
механизмов, работающих с систематическими перегрузками до 10 или 15 %;
использовать электродвигатели в электросетях с систематическими
скачками или колебаниями напряжения питания без понижения нагрузки;
использовать двигатели в условиях наличия высоких постоянно
действующих температур окружающей среды без понижения нагрузки на них.
ГОСТ 31606 – 2012 «Машины электрические вращающиеся
Двигатели асинхронные мощностью от 0,12 до 400 кВт включительно
Общие технические требования» устанавливает две величины сервисфактора: 1,1 и 1,15.
22.
При длительной работе двигателя с сервис-фактором(перегрузкой), его ресурс снижается, при этом повышение
температуры подшипникового узла требует более частой замены
смазки в них.
Для двигателей устанавливают следующие показатели надёжности:
- 30 000 ч. не менее – средний ресурс до капитального ремонта;
- 23 000 ч. не менее – средняя наработка на отказ;
- 20 000 ч. не менее – расчётная долговечность подшипников;
- 3 года, не менее – 90 %-ный срок сохраняемости.
Практика и расчёты показали, что при равномерном
распределении перегрузок во всём временном интервале допустимая
суммарная длительность работы электродвигателя, имеющего
сервис-фактор 1,15 с 15 % перегрузкой составляет ТРЕТЬ РЕСУРСА.
23.
КОЭФФИЦИЕНТ МОЩНОСТИ : COSИзменение коэффициента мощности в процессе работы асинхронного
двигателя обусловлено изменением составляющих тока статора.
РЕАКТИВНАЯ составляющая тока статора Q не зависит от нагрузки на валу
двигателя и при любом напряжении сети практически неизменна.
АКТИВНАЯ составляющая тока двигателя P пропорциональна его механической
нагрузке на валу.
С увеличением нагрузки на валу относительное значение реактивного тока
убывает, а коэффициент мощности cos φ увеличивается.
При реальном холостом ходе (т.е. при отсутствии нагрузки на валу двигателя) его
коэффициент мощности довольно низок, порядка 0,2 ... 0,3. Угол φ составляет ≈ 75 ÷ 700.
С увеличением нагрузки на валу АД коэффициент мощности (cos ) быстро
возрастает (за счёт активной Р) и достигает максимума при значения (0,7... 0,9) PH.
Угол φ составляет ≈ 45 ÷ 250.
При увеличении нагрузки двигателя свыше PH увеличивается реактивная
составляющая тока и коэффициент мощности cos начинает несколько уменьшаться.
Если нагрузку продолжить увеличивать, то есть нагружать вал сверх номинала PH,
то ротор будет тормозиться, возрастёт величина скольжения s, индуктивное сопротивление
ротора станет вносить свой вклад, и коэффициент мощности cos начнет уменьшаться.
Таким образом, причиной увеличения реактивной составляющей
тока является влияние магнитных потоков рассеяния, что и приводит к
увеличению реактивной мощности АД.
cos
Р1
P1
Р1
S
3 U1 I1
Р12 Q12
24.
КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ:Р2
Р2
Коэффициент полезного действия (КПД) – это
Р 1 Р 2 Р
отношение полезной мощности Р2 к подводимой Р1.
Полезной мощностью Р2, является механическая мощность,
развиваемая двигателем на его валу, тогда как подводимая мощность Р1,
является электрическим параметром и определяется произведением
напряжения питания, тока и коэффициента мощности cos . Р1 = 3 U1 I1 cos
Потери мощности Р складываются из: постоянной составляющей
потерь и потерь, зависящих от нагрузки (переменные потери).
К группе постоянных потерь относятся потери в стали сердечника
от гистерезиса и вихревых токов, а также механические потери.
Данные потери определяют экспериментально из опыта холостого хода.
Переменными
потерями
являются
потери,
обусловленные
сопротивлением проводников статора и ротора протекающему по ним току.
Обычно, максимум КПД АД имеет место при нагрузке на валу АД, в
диапазоне равном (близком) от 75 до 100 % от номинальной нагрузки.
Это объясняется тем, что двигатели проектируются с учетом того
обстоятельства, что в процессе эксплуатации они не всегда полностью загружены.
8. Активная
потребляемая
мощность
9. Полная
45 ,0
Р1
48,65 кВт потребляемая
0 ,925
мощность
Р2
S
P1
48,65
57 ,24кВА
COS 0 ,85
25.
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе.Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cosφ1 и отдает приводимому им во
вращение механизму механическую мощность Рмх (рисунок 1).
Рисунок 1 – Энергетическая диаграмма АД
В процессе преобразования энергии в машине
имеют место потери мощности:
- электрические - в обмотках статора РЭЛ1 и ротора
РЭЛ2,
- магнитные РМ - от гистерезиса и вихревых токов
в ферромагнитных частях машины;
- механические РМХ - от трения в подшипниках и
вращающихся частей (ротора и вентилятора) о воздух.
Из статора в ротор, вращающимся
электромагнитная мощность PЭМ.
электромагнитным
полем,
передается
В роторе электромагнитная мощность PЭМ превращается в механическую мощность
ротора Р׳МХ.
Полезная механическая мощность на валу двигателя PМХ меньше мощности Р׳МХ на значение
потерь мощности на трение РМХ (трение в подшипниках, трение вентилятора и ротора о воздух).
При возрастании механической нагрузки на валу двигателя увеличивается ток I2.
В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создаётся в асинхронном двигателе в результате взаимодействия
вращающегося магнитного поля с током I2, в проводниках обмотки ротора, который индуцируется этим полем.
Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cosφ2 (здесь φ2 угол сдвига фаз между током I2 и ЭДС Е2 в обмотке ротора).
Величина электромагнитного момента определяется по формуле 2:
где
M = cм Фт I2 cos φ2 (2)
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная машины (константа), определяемая конструктивными параметрами данной машины и
не зависящая от режима её работы.
26.
МЕХАНИЧЕСКИЕ ПОТЕРИМеханические потери РМЕХ обусловлены трением в подшипниках,
скользящих электрических контактах при их наличии (АД с ф.р., ДПТ), а также
затраты на вентиляцию.
Механические потери определяются только частотой вращения и не
зависят от величины нагрузки (тока обмотки ротора/якоря).
1. ПОТЕРИ В ПОДШИПНИКАХ РПОД определяются:
- типом («качения – скольжения», «шариковые – роликовые»),
- состоянием трущихся поверхностей,
- видом и состоянием смазки (жидкие/консистентные).
Жировой/синтетический солидол (кальциевые) / Консталин (натриевые) /
Литол (литиевые) / ЦИАТИМы (201, 221, 221F) (кальциевые) / Полинтекс ЕР-2 /
Термофлекс ЕР-2 / Дивинол / Смазки ВНИИНП
2. ПОТЕРИ НА ТРЕНИЕ РТР.Щ.К в щёточных электрических контактах:
РТР .Щ .К . kТР . qЩ .К . SЩ . v П .К .
где
kТР. – коэффициент трения материалов щеточного контакта, kТР ≈ 0,2 ÷ 0,3;
qЩ.К – удельное давление щёточного контакта, Па;
SЩ. – площадь контактной поверхности всех щёточных контактов, м2;
vП.К. – окружная скорость коллектора или токосъёмных колец, м/c, vК = (π DК n) /60
DК – диаметр коллектора или токосъёмного кольца, м;
n – частота вращения коллектора или токосъёмного кольца, мин-1.
27.
3. ПОТЕРИ НА ВЕНТИЛЯЦИЮ РВЕНТ. зависят от:- конструкции машины, IP
- геометрии путей воздушного потока,
- рода вентиляции.
Потери на вентиляцию в самовентилируемых электрических
машинах РВЕНТ. определяются по эмпирическим формулам, например;
РВЕНТ kВЕНТ Q v В2
где
kВЕНТ – коэффициент, зависящий от конструкции электрической машины,
kВЕНТ = 1,5 ÷ 2,5;
Q – расход воздуха, требуемый для обеспечения вентиляции, м3/c;
vВ – окружная скорость вентилятора по наружной кромке лопаток, м/c,
vВ = (π DВ n) /60
DВ – диаметр вентилятора, м;
n – частота вращения вентилятора, мин-1.
ОБЩИЕ МЕХАНИЧЕСКИЕ ПОТЕРИ в машинах средней мощности
(10 ÷ 400 кВт) составляют приблизительно 2 ÷ 0,5 % от номинальной
мощности на валу.
28.
МАГНИТНЫЕ ПОТЕРИМагнитные потери РМАГ. включают в себя потери на гистерезис и потери на
вихревые токи.
Данные потери выделяются в ферромагнитных элементах машины, в
которых основной магнитный поток меняется во времени.
В машинах переменного тока, к которым относится АД с к.з.р., этим
ферримагнитным элементом является сердечник статора (пакет железа статора).
Удельные (на единицу массы) ПОТЕРИ на ГИСТЕРЕЗИС определяются
площадью петли, пропорциональны частоте в первой степени и квадрату индукции
(Тл) – РМАГ.Г. = f1 В2.
Удельные (на единицу объёма) ПОТЕРИ на ВИХРЕВЫЕ ТОКИ РМАГ.В.Т. (Вт/м3)
определяются по формуле :
2
2
2
где
К – коэффициент, зависящий от качества
электротехнической стали пакета статора;
d – толщина листа пакета статора, м;
- удельное электрическое сопротивление
материала стали, Ом м.
Общие магнитные потери
приближённо описываются
формулой:
РМАГ. = РМАГ.Г. + РМАГ.В.Т. +РМАГ.ДОБ. =
= (В2 , f1,3 )
Р МАГ .В .Т . К
В f d
29.
ЭЛЕКТРИЧЕСКИЕ ПОТЕРИЭЛЕКТРИЧЕСКИЕ ПОТЕРИ РЭЛ.
Это потери в токопроводах (обмотках), это ДЖОУЛЕВЫ потери
РЭЛ. = I2 R
Потери пропорциональны квадрату тока, поэтому сильно зависят от
нагрузки электродвигателя.
Сопротивление обмотки зависит и изменяется от температуры
Rt R20 1 t 20 0
где
- температурный коэффициент сопротивления,
для меди = 0,00411 ÷ 0,0043 Ом/10С;
Rt
– активное сопротивление при рабочей температуре обмотки
электродвигателя, Ом;
R20 – активное сопротивление обмотки электродвигателя при температуре
+200С; для меди = (0,01724 ÷ 0,018) 10-6 Ом м;
t - рабочая температура обмотки электродвигателя при текущей нагрузке,
0С.
Относительная доля (вес) составляющих потерь в электродвигателе:
- механические
РМЕХ. 0,1;
- магнитные
РМАГ. = 0,2 ÷ 0,4;
- электрические
РЭЛ. = 0,5 ÷ 0,7;
общих потерь
30.
КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯЭЛЕКТРИЧЕСКОЙ МАШИНЫ
(ЭЛЕКТРОДВИГАТЕЛЯ)
ОТНОСИТЕЛЬНАЯ ДОЛЯ (вес) составляющих потерь в электродвигателе:
- механические
- магнитные
- электрические
где
РМЕХ. 0,1;
РМАГ. = 0,2 ÷ 0,4;
РЭЛ. = 0,5 ÷ 0,7;
общих потерь
Р2 – полезная мощность на валу двигателя, Вт (кВт);
Р1 – подведённая мощность из сети, ВА (кВ А);
Р - суммарные потери, Вт (кВт);
Р = РМЕХ + РМАГ + РЭЛ
Р2
Р2
Р1 Р
Р
1
Р1 Р 2 Р
Р1
Р1
31.
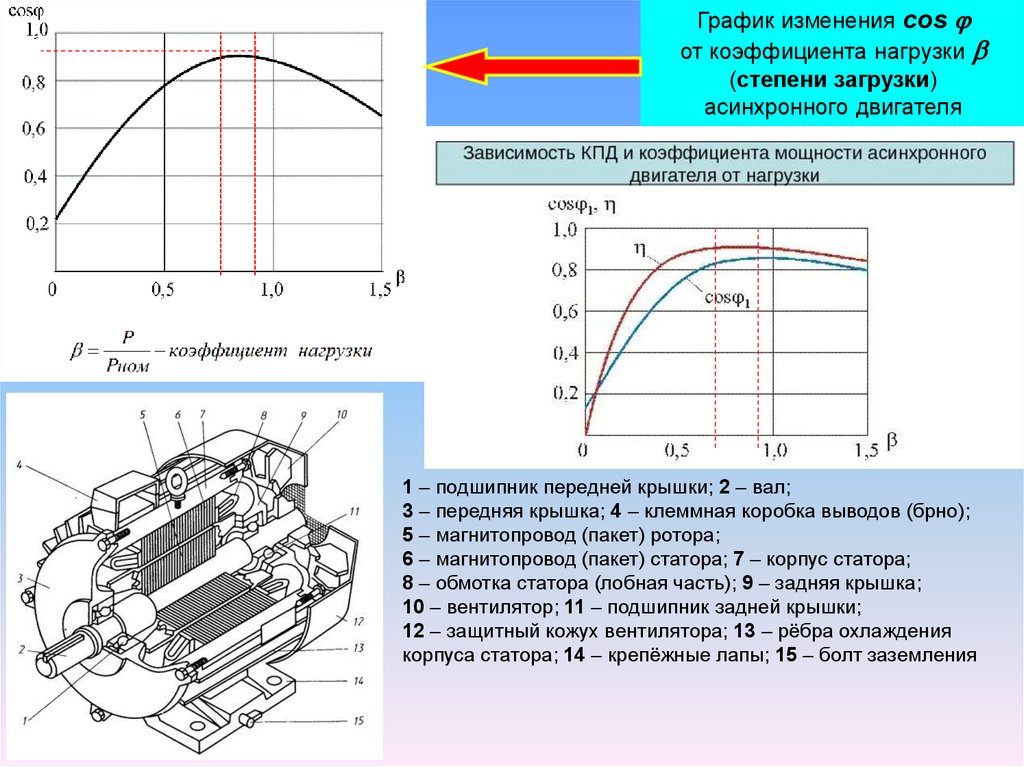
График изменения cosот коэффициента нагрузки
(степени загрузки)
асинхронного двигателя
1 – подшипник передней крышки; 2 – вал;
3 – передняя крышка; 4 – клеммная коробка выводов (брно);
5 – магнитопровод (пакет) ротора;
6 – магнитопровод (пакет) статора; 7 – корпус статора;
8 – обмотка статора (лобная часть); 9 – задняя крышка;
10 – вентилятор; 11 – подшипник задней крышки;
12 – защитный кожух вентилятора; 13 – рёбра охлаждения
корпуса статора; 14 – крепёжные лапы; 15 – болт заземления
32.
ВЛИЯНИЕ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ДВИГАТЕЛЯНА ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Ответственным конструктивным элементом (параметром) асинхронных
двигателей является величина воздушного зазора между статором и
ротором.
Величина зазора влияет на энергетические и виброакустические
показатели, использование активных материалов и надежность
электродвигателей.
При УМЕНЬШЕНИИ зазора ПОНИЖАЕТСЯ реактивная составляющая
тока холостого хода и, следовательно, повышается коэффициент
мощности cos электродвигателя.
ПРИ ЭТОМ УВЕЛИЧИВАЕТСЯ: магнитное рассеяние, а следовательно,
индуктивное
сопротивление
электродвигателя;
увеличиваются
добавочные потери, уменьшается фактический КПД АД, увеличивается
нагрев обмоток; увеличивается уровень шума и вибрации магнитного
присоединения, возрастает нагрузка на вал и подшипники от силы
магнитного притяжения; возникает опасность касания ротора о статор и
тем самым понижается надежность электродвигателя.
В асинхронных электродвигателях величина воздушного зазора
колеблется в пределах от 0,2 до 2 мм (в зависимости от мощности).
33.
10. Построение механической характеристики ЭП (электродвигателя)Механическая характеристика (МХ) двигателя – это зависимость частоты
вращения ротора (n) двигателя от момента (М) на валу двигателя.
n = (М)
n1 – синхронная частота вращения магнитного поля статора, мин-1;
n2 – асинхронная (номинальная) частота вращения ротора, мин-1;
sН – номинальное электрическое скольжение;
sКР – критическое электрическое скольжение.
Для промежуточных величин скольжения sпр в диапазоне sН < sпр < sКР должно быть
рассчитано не менее 7 (семи) равномерно распределённых в указанном диапазоне, значений
промежуточного момента двигателя МПР.
Для промежуточных величин скольжения sпр в диапазоне sКР < sпр < 0,4 должно быть
рассчитано не менее 3 (трёх) значений промежуточного момента МПР.
n, мин-1 s
n1 0
М=0
n = n1
s=0
М = МH
n = nН = n2
s = sH
Четыре точки через
которые пройдёт МХ
уже известны
0 1
М = МКР
n = nКР 10. Рассчитать значения МПР (не менее 10
s = sКР
значений) для выбранных значений sПР
М = МП
n=0
s=1
М, Н м
2 М КР
М ПР
s пр sKP
sKP s пр
34.
М 0 ,03М 0 ,04
2 817 ,6
1635,2
1635,2
415 ,03 Н м
0 ,03 0 ,11 0 ,273 3 ,667
3 ,94
0 ,11 0 ,03
2 817 ,6
1635,2
1635,2
525 ,28 Н м
0 ,04 0 ,11 0 ,363 2 ,75 3 ,113
0 ,11 0 ,04
2 817 ,6
1635,2
1635,2
615 ,9 Н м
0 ,05 0 ,11 0 ,455 2 ,2 2 ,655
0 ,11 0 ,05
М 0 ,05
2 817 ,6
1635,2
1635,2
688,5 Н м
0 ,06 0 ,11 0 ,545 1,83 2 ,375
0 ,11 0 ,06
2 817 ,6
1635,2
1635,2
М 0 ,07
740 ,92 Н м
0 ,07 0 ,11 0 ,636 1,571 2 ,207
0 ,11 0 ,07
М 0 ,15
М 0 ,2
М 0 ,25
М 0 ,06
М 0 ,08
М 0 ,09
М 0 ,1
2 817 ,6
1635,2
1635,2
777 ,93 Н м
0 ,08 0 ,11 0 ,727 1,375 2 ,102
0 ,11 0 ,08
2 817 ,6
1635,2
1635,2
801,57 Н м
0 ,09 0 ,11 0 ,818 1,222
2 ,04
0 ,11 0 ,09
2 817 ,6
1635,2
1635,2
813,94 Н м
0 ,1 0 ,11 0 ,909 1,1 2 ,009
0 ,11 0 ,1
Расчёт МПР в диапазоне от
sН = 0,02 до SКР = 0,11
М0 ,3
М 0 , 35
М0 ,4
2 817 ,6
1635,2
1635,2
779,78 Н м
0 ,15 0 ,11 1,364 0 ,733 2 ,097
0 ,11 0 ,15
2 817 ,6
1635,2
1635,2
690 ,54 Н м
0 ,2 0 ,11 1,818 0 ,55 2 ,368
0 ,11 0 ,2
2 817 ,6
1635,2
1635,2
602 ,73 Н м
0 ,25 0 ,11 2 ,273 0 ,44 2 ,713
0 ,11 0 ,25
2 817 ,6
1635,2
1635,2
528,51 Н м
0 ,3 0 ,11 2 ,727 0 ,367 3 ,094
0 ,11 0 ,3
2 817 ,6
1635,2
1635,2
467 ,74 Н м
0 ,35 0 ,11 3 ,182 0 ,314 3 ,496
0 ,11 0 ,35
2 817 ,6
1635,2
1635,2
418,1 Н м
0 ,4 0 ,11 3 ,636 0 ,275 3 ,911
0 ,11 0 ,4
Расчёт МПР в диапазоне
от sКР = 0,11 до s = 0,4
35.
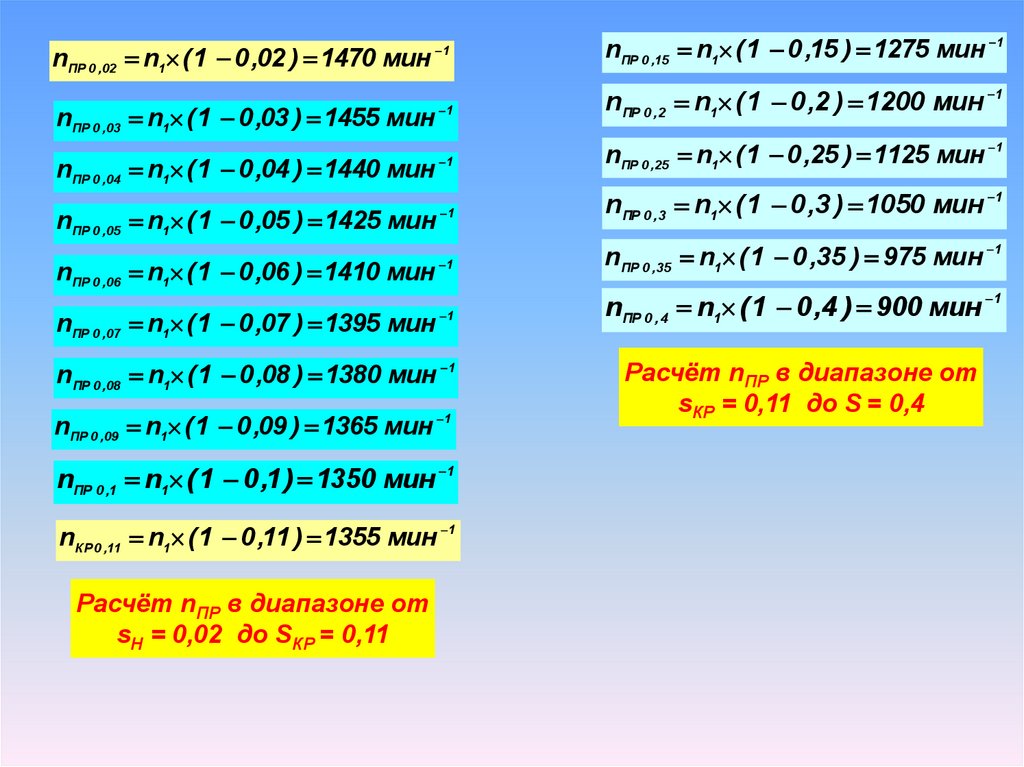
nПР 0 ,02 n1 ( 1 0 ,02 ) 1470 мин 1nПР 0 ,15 n1 ( 1 0 ,15 ) 1275 мин 1
nПР 0 ,03 n1 ( 1 0 ,03 ) 1455 мин
1
nПР 0 ,2 n1 ( 1 0 ,2 ) 1200 мин 1
nПР 0 ,04 n1 ( 1 0 ,04 ) 1440 мин
1
nПР 0 ,25 n1 ( 1 0 ,25 ) 1125 мин 1
nПР 0 ,05 n1 ( 1 0 ,05 ) 1425 мин
1
nПР 0 , 3 n1 ( 1 0 ,3 ) 1050 мин 1
nПР 0 ,06 n1 ( 1 0 ,06 ) 1410 мин
1
nПР 0 , 35 n1 ( 1 0 ,35 ) 975 мин 1
nПР 0 ,07 n1 ( 1 0 ,07 ) 1395 мин
1
nПР 0 , 4 n1 ( 1 0 ,4 ) 900 мин 1
nПР 0 ,08 n1 ( 1 0 ,08 ) 1380 мин 1
nПР 0 ,09 n1 ( 1 0 ,09 ) 1365 мин 1
nПР 0 ,1 n1 ( 1 0 ,1 ) 1350 мин 1
nКР 0 ,11 n1 ( 1 0 ,11 ) 1355 мин 1
Расчёт nПР в диапазоне от
sН = 0,02 до SКР = 0,11
Расчёт nПР в диапазоне от
sКР = 0,11 до S = 0,4
36.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ 5А200L4n мин-1
s
n1 0
n2
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.15
0.2
0.25
0.3
0.35
0.4
М Н м
0 1
МН
МП МКР
37.
Расчёт параметров и построение механической характеристики двигателяДля рабочего участка двигательной части механической характеристики (sН sКР) рассчитать
жёсткость механической характеристики.
Построить касательную к механической характеристике на участке (sН 1,5 sН ).
n s
n2
n1
Измерить угол наклона касательной к перпендикуляру оси момента.
11. Расчёт коэффициента жёсткости МХ АД β = tg α = ΔM / Δn
0
sH
ΔnГР
mП
α
М ≈ (0,15 0,2) МН
n = nГРАФ/n2
sКР
nКР
α
МП
М НОМ
М КР
mКР
М НОМ
М КР М МАКС
При расчёте значения - величины M и n в
формуле должны быть представлены в
относительных величинах от значений МH и n2
М ПР
2 М КР
s пр sKP
sKP s п р
ΔM
mП
1
0
MН
MП
mКР
MКР
M, Н м
38.
Стабильность скорости (частоты вращения ротора) – характеризуетсяизменением скорости (частоты вращения ротора) двигателя при изменении
момента нагрузки на валу.
Стабильность
скорости
характеризуется
жёсткостью
механической
характеристики.
Коэффициент жёсткости β – определяется тангенсом угла наклона
механической характеристики к оси скорости
β = tq α = ∆М /∆ω = ∆М /∆n
Мягкая характеристика: β < 10 (α < 84,50)
Жёсткая характеристика: 10 < β < 40 (84,50 < α < 88,50)
Абсолютно жёсткая характеристика: β > 40 (α > 88,50)
Крутизна механической характеристики k
k = 1/ β = Δω / ΔM = Δn / ΔM
k = 0 – 0,024 – СД
k = 0,025 – 0,10 - ДПТ НВ, ДТП ПВ, АД с к.з.р., АД с ф.р.
k ≥ 0,10 – ДПТ ПсВ , ДТП СмВ
По результатам расчёта СДЕЛАТЬ ВЫВОД о жесткости механической
характеристики (т.е о стабильности скорости при изменении нагрузки) АД с
к.з.р. по варианту задания на основании численных значений коэффициента
жесткости β, коэффициента крутизны механической характеристики k, и
замера угла наклона касательной α непосредственно на графике.
39.
12. Режимы работы асинхронных двигателей (АД)Холостой ход. Если пренебречь механическим трением в подвижных узлах подшипников и
магнитными потерями в стали (идеализированная машина), то ротор АД при холостом ходе вращался бы с
синхронной частотой n2 = n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю..
n s
n2
n1 0
В реальном АД частота вращения ротора n2 при Х.Х. никогда не может стать
равной частоте вращения n1, так как в этом случае магнитное поле статора
перестанет пересекать проводники обмотки ротора и в них не возникнет ЭДС и ток.
sH
По этой причине АД в данном режиме не сможет развить
вращающий
момент
и
его
ротор
под
влиянием
противодействующего момента сил трения начнёт замедляться.
Замедление ротора будет происходить до тех пор, пока вращающий момент,
возникший при уменьшенной частоте вращения, не станет равным моменту,
создаваемому силами трения.
Обычно при реальном Х.Х. АД работает со скольжением s = 0,2 - 0,5 %.
nКР
sКР
13. nх.х. = n1 (1 – sх.х. ) = n1 (1 – (0,002 0,005)) = 1500 (0,998 0,995) =
= 1497 1493 мин-1
Электродвигатель переходит в режим реального Х.Х., когда с его вала снимают рабочую нагрузку.
В этом случае можно определить такие важные параметры функционирования устройства, как
намагничивающий ток, мощность и коэффициент потерь в элементах конструкции привода.
Главное – в режиме холостого хода можно определить исправность устройства.
Электродвигатель на холостом ходу не должен нагреваться. Но в некоторых случаях температура
привода повышается – и это сигнализирует о неполадках, которые впоследствии могут проявить себя.
ΔM
mП
1
0
MН
MП
mКР
MКР
M, Н м
40.
Параметры холостого хода электродвигателяХолостой ход – это режим работы АД, при котором на валу отсутствует нагрузка,
и параметры электрических величин соответствуют номинальным значениям.
В этом случае устройство с точки зрения законов электротехники схоже с
трансформатором.
Главное – оно потребляет меньше электроэнергии, что особенно важно для
контроля правильности работы электродвигателя.
В частности, ток холостого хода АД в зависимости от мощности и номинальной
частоты вращения ротора составляет в среднем 20 - 90% от номинального значения тока.
ВЫВОД: Режим Х.Х. АД крайне нежелательный режим работы при эксплуатации.
41.
ПРИМЕР № 1. Ток холостого хода электродвигателя мощностью 3 кВт при частоте вращения в1000
(рисунок 2).
-1
При частоте вращения 3000 мин – всего 45 % от номинального тока (рисунок 3).
Первичная мера проверки исправности АД перед установкой на производственную машину
или агрегат – определение фактического значения тока в режиме холостого хода.
Значительно расхождение величины фактического значения тока в режиме Х.Х. с расчётной или
табличной величиной - сигнал о неполадках в АД.
Параметры работы двигателя обычно указаны в
мин-1 составляет 70 % от номинального тока
прилагаемой к нему документации или могут быть
получены посредством расчётов.
Рисунок 2
Рисунок 3
ЧТО ДЕЛАТЬ, ЕСЛИ ПРОИСХОДИТ НАГРЕВ
ЭЛЕКТРОДВИГАТЕЛЯ НА ХОЛОСТОМ ХОДУ.
Допускается
лишь
незначительное
увеличение
температуры, обусловленное естественными причинами
– появление трения в подшипниках на валу ротора и
сопротивление в обмотке.
Заметный нагрев сигнал о неполадках в устройстве.
Первая причина нагрева на Х.Х. АД – наличие
межвиткового замыкания в обмотках.
Это требует срочного ремонта.
При повышении нагрузок межвитковое замыкание
может привести к перегреву и выгоранию обмотки – и, как
следствие, повреждению как самого ЭД, так и
конструкции, в которую он установлен.
Вторая причина нагрева на Х.Х. АД – эксплуатация в
нештатных условиях.
Превышение
напряжения
питания
выше
номинального значения.
В этом случае необходимо отключить питание
двигателя, так как из-за перегрева может возникнуть
межвитковое замыкание в обмотках или замыкание
обмотки на корпус двигателя.
Неправильное включение (соединение) обмоток.
Определение Iхх для выбранного двигателя
по справочной таблице.
Третья причина нагрева на Х.Х. АД – эксплуатация:
при неисправном подшипнике или наличия загрязнений
(отложений грязи) между пакетом (железом) статора и
пакетом (железом) ротором, или поломке или отсутствии
вентилятора или нарушении вентиляции.
42.
114. Определение тока холостого хода Iх.х. I
I
sin
cos
Н
электрического двигателя Х . Х . Н .
2 m КР
Значение sin находится из основного
тригонометрического тождества
15. Проверка (сравнение) табличных и
расчётных значений тока холостого хода
электрического двигателя
1 sin 2 cos 2
I
I ХХ % ХХ 100% I ХХ % I ХХ ТАБЛ
IН
При режиме Х.Х. в асинхронном двигателе имеют место те же электромагнитные
процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке
трансформатора, а обмотка ротора – вторичной обмотке).
По обмотке статора АД проходит ток холостого хода IХ.Х. (I0), однако его значение в
из-за наличия воздушного зазора между ротором и статором значительно больше, чем в
трансформаторе (в АД I0 20 - 40 % IН по сравнению с 3 – 10 % IН у трансформаторов).
Для уменьшения тока х.х. I0 в АД стремятся выполнить воздушные зазоры
минимально возможными, исходя из конструкции и возможностей технологии
производства.
Например, у современных двигателей мощностью 5 кВт зазор между статором и
ротором обычно не превышают величину 0,2 - 0,3 мм.
Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную
составляющие.
Реактивная составляющая тока холостого хода (намагничивающий ток)
обеспечивает создание в двигателе требуемого магнитного потока.
Активная составляющая – передачу в обмотку статора из сети энергии,
необходимой для компенсации потерь мощности в машине в этом режиме.
43.
16. Режимы работы асинхронных двигателей (АД)Нагрузочный режим. Чем больше момент нагрузки на валу двигателя, со стороны рабочего
механизма, тем больше скольжение и тем меньше частота вращения ротора n2.
Увеличение скольжения при возрастании момента объясняется следующим фактором.
При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения n2 уменьшается.
n s
n2
n1
0
sH
Δn
Одновременно с этим увеличивается частота (n1 – n2) пересечения
вращающимся магнитным полем статора проводников обмотки ротора, а
следовательно, увеличивается ЭДС Е2, индуцированная в обмотке ротора,
ток в роторе I2 и образованный этим током электромагнитный вращающий
момент М.
Данный процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не
сравняется с внешним нагрузочным моментом Мвн который создаётся рабочим агрегатом (машиной).
При достижении равенства моментов М = Мвн торможение прекратится и ротор двигателя будет
снова вращаться с постоянной частотой вращения, но с меньшей, чем до увеличения нагрузки.
nКР
sКР При уменьшении внешнего нагрузочного момента Мвн частота вращения ротора по той же причине
будет увеличиваться. Обычно при номинальной нагрузке (Мвн = Мн) номинальное скольжение для
двигателей средней и большой мощности составляет от 2 до 4 %, а для двигателей малой мощности от
5 до 7,5 %.
При работе двигателя под нагрузкой по его обмоткам статора и ротора проходят токи i1 и i2.
Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся
магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным
полем с частотой n1, а обмотка вращающегося ротора – с частотой n1 – nтек .
Следовательно, f2 / f1 = (n1 – nтек ) / n1 = s или для номинального режима работы f2 = f1 sН .
Частота тока в обмотке ротора в режиме номинальной нагрузки ≈ 1 2,5 Гц.
ΔM
mП
1
0
MН
MП
mКР
MКР
17. Найти f2
M, Н м
44.
18. РЕЖИМ ПУСКА АД с к.з.р.В начальный момент пуска ротор двигателя неподвижен.
Электрическое скольжение s = 1, магнитное поле пересекает ротор с
максимальной частотой, индуцируя в нем наибольшую ЭДС Е2.
Так как ток в роторе I2 определяется значением ЭДС в роторе Е2, то в
начальный момент пуска он будет наибольшим.
Ток в статоре в этот момент времени (при пуске) также будет наибольшим.
Пусковой ток АД с к.з.р. IП обычно в 5 – 7 раз > IН .
Вращающий момент при пуске АД называется пусковым моментом Мп.
Пусковой момент современных АД с к.з.р обычно немного меньше
наибольшего (критического, максимального) момента, который может развить
двигатель.
Для двигателей различных типов и мощностей отношение
Мп / Мном = 0,7 ÷ 2,5.
45.
ПУСКОВЫЕ СВОЙСТВА АД с К.З.Р.Пусковые свойства асинхронного двигателя определяются особенностями
его конструкции, в частности устройством ротора.
В большинстве случаев двигатели с короткозамкнутым ротором
запускают в работу прямым включением обмоток статора к питающей сети.
Данный
способ пуска СХЕМНО и КОНСТРУКТИВНО ПРОСТОЙ,
БЫСТРЫЙ и МАЛО ЗАТРАТНЫЙ.
Для его осуществления необходим лишь простейший коммутирующий
аппарат – выключатель (реле, контактор).
ОДНАКО следует помнить, что при прямом включении двигателя в сеть
пусковой ток в 4 - 7 раз превышает его номинальное значение.
Кратковременный (однократный) толчок пускового тока чаще всего
безопасен для двигателя.
Значительный пусковой ток вызывает кратковременное снижение
напряжения в сети, что может оказать неблагоприятное влияние на работу других
потребителей ЭЭ, особенно при малой (ограниченной) мощности источника
напряжения (трансформатора) или значительной длине линии питания.
Следует иметь в виду еще один недостаток прямого пуска асинхронного
двигателя - это кратность пускового момента, которая обычно составляет 1,5 ... 2,5.
Таким образом, асинхронный двигатель с короткозамкнутым ротором
при пуске имеет большую силу тока при относительно небольшом вращающем
моменте на валу.
46.
19. РЕЖИМ ПЕРЕГРУЗКИ АД с к.з.р.Режим перегрузки АД характеризуется наличием на валу
двигателя
момента
сопротивления
МС
(нагрузки)
со
стороны
производственной машины больше, чем номинальный момент
двигателя МН.
Наличие такого момента сопротивления МС ведет к тому, что
скорость ротора nТЕК уменьшается (интенсивность охлаждения
снижается), ток статора увеличивается (возрастают энергетические
потери), что ведет к интенсивному нагреву обмоток статора и ротора.
Это
может
явиться
причиной
теплового
изоляции обмотки статора и ротора (у АД с ф.р.)
повреждения
47.
20. Расчёт значения механической мощности на валудвигателя при наличии на валу АД с к.з.р. указанных моментов
сопротивления МС:
МС = 0,5 МН ;
Режим неноминальной (неполной) нагрузки АД
МС = 0,75 МН ;
МС = 1,0 МН
МС = 1,25 МН ;
Режим номинальной нагрузки АД
Режим перегрузки АД
МС = 1,5 МН ;
Р
М Н 9550
n2
где
М С n ПР
Р
9550
МС – момент сопротивления на валу АД, Н м;
nПР – промежуточная частота вращения ротора при указанном моменте
сопротивления, мин-1.
Значения данной величины nПР определяются по графику механической
характеристики, построенного ранее, при рассчитанных значениях МС.
48.
ГОСТ 28173-89 Машины электрические вращающиеся Номинальные данные и рабочие характеристикиР
М Н 9550
n2
М С n ПР
Р
9550
где
МС – момент сопротивления на валу АД, Н м;
nПР – промежуточная частота вращения ротора при указанном моменте
сопротивления, мин-1.
Значения данной величины nПР определяются по графику механической
характеристики, построенного ранее, при рассчитанных значениях М .
49.
21. Определение величины критической мощности РКР дляобеспечения на валу двигателя момента критического МКР .
М КР n КР
Р КР
9550
где
РКР – критическая мощность на валу двигателя при перегрузке, кВт;
МКР – критический момент на валу двигателя, Н м;
п.5 расчёта
nКР – критическая скорость двигателя (при МКР), мин-1; п.7 расчёта
22. Определение значения тока статора АД при указанных в п.20
значениях момента сопротивления (нагрузки) на валу двигателя.
Значения энергетических параметров cos и АД для указанных
значений нагрузок принять по данным справочных таблиц.
Для расчёта значения тока в п.22 используется формула п.1 расчёта.
Значения энергетических параметров cos и
АД для значения
МС = 1,5 МН принять аналогичными как для значения МС = 1,25 МН, указанным в
справочных таблицах.
23. Построение графиков зависимостей:
Р = (МС)
I = (MC)
График I = (МС) будет востребован при определении времени срабатывания
электротеплового расцепителя автоматического выключателя обеспечивающего защиту АД
от перегрузки.
50.
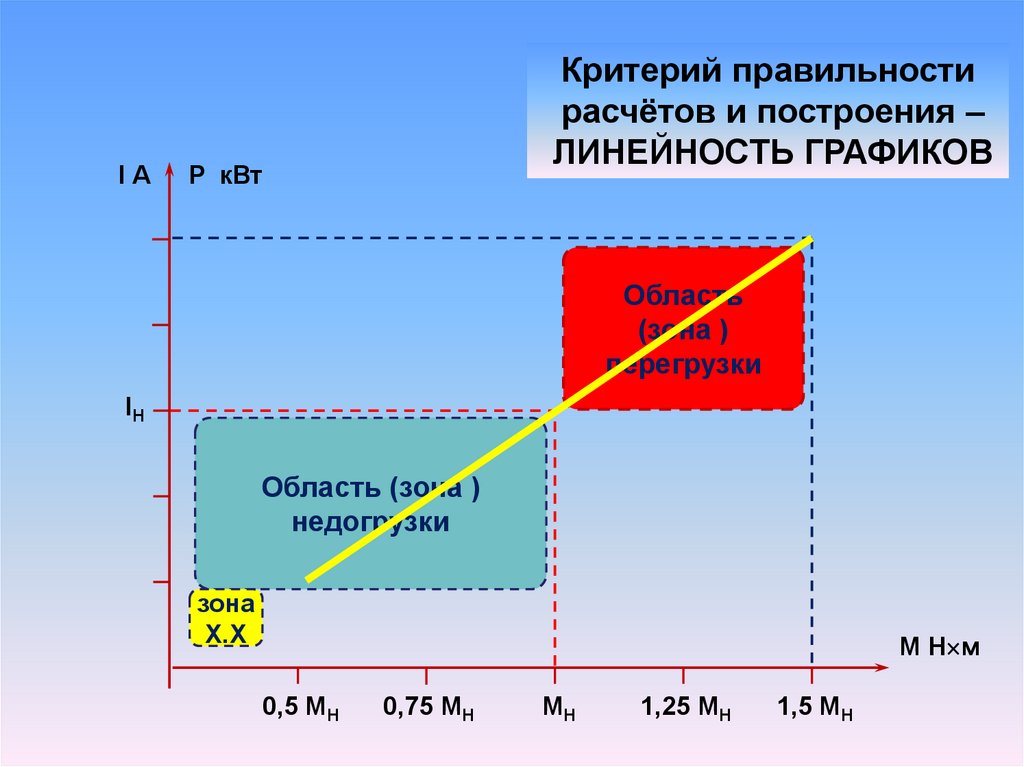
IАКритерий правильности
расчётов и построения –
ЛИНЕЙНОСТЬ ГРАФИКОВ
P кВт
Область
(зона )
перегрузки
IH
Область (зона )
недогрузки
зона
Х.Х
M Н м
0,5 MH
0,75 MH
MH
1,25 MH
1,5 MH
51.
ТАБЛИЦЫ ЭНЕРГЕТИЧЕСКИХ СПРАВОЧНЫХ ДАННЫХАСИНХРОННЫХ ДВИГАТЕЛЕЙ ДЛЯ РАЗЛИЧНЫХ РЕЖИМОВ РАБОТЫ
ηН = 0,925
Н
cosφН = 0,85 cos
Н
Н
cos Н
52.
РАБОЧИЕ ХАРАКТЕРИСТИКИАСИНХРОННОГО ДВИГАТЕЛЯ
53.
24. Расчёт и выбор сечения жил проводов и кабелейпо допустимому нагреву.
Правила устройства электроустановок (ПУЭ)
1.3.9. При определении допустимых длительных токов для кабелей,
неизолированных и изолированных проводов и шин, а также для жестких и гибких
токопроводов, проложенных в среде, температура которой существенно
отличается от приведенной в 1.3.12 - 1.3.15 и 1.3.22, следует применять
коэффициенты, приведенные в таблице 1.3.3.
1.3.10. Допустимые длительные токи для проводов с резиновой или
поливинилхлоридной изоляцией, шнуров с резиновой изоляцией и кабелей с
резиновой или пластмассовой изоляцией в свинцовой, поливинилхлоридной и
резиновой оболочках приведены в табл. 1.3.4 - 1.3.11.
Допустимые длительные токи приняты (указаны) для температур:
- жил +650С;
- окружающего воздуха +250С;
- земли +150С.
НЕЧЁТНЫЕ ВАРИАНТЫ задания – tОКР.СР. = +350C / –100С
КАБЕЛЬ ТРЁХЖИЛЬНЫЙ С МЕДНЫМИ ЖИЛАМИ с ПВХ изоляцией
ЧЁТНЫЕ ВАРИАНТЫ задания – tОКР.СР. = +400C / –150С
КАБЕЛЬ ТРЁХЖИЛЬНЫЙ С АЛЮМИНИЕВЫМИ ЖИЛАМИ с ПВХ изоляцией
54.
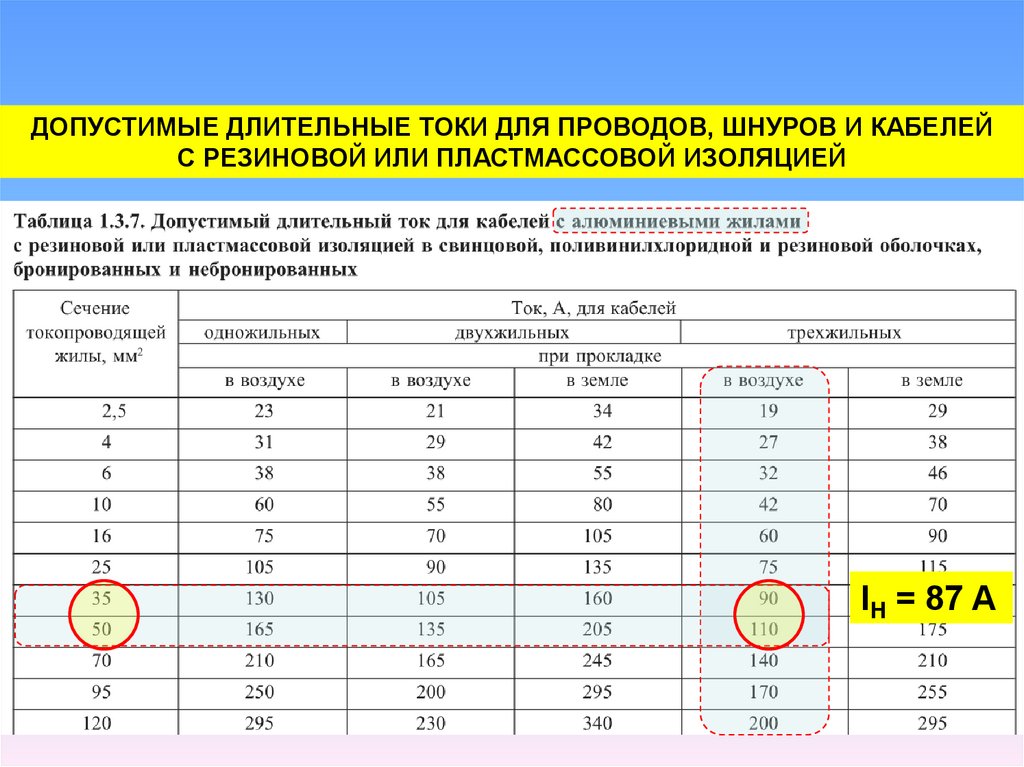
ДОПУСТИМЫЕ ДЛИТЕЛЬНЫЕ ТОКИ ДЛЯ ПРОВОДОВ, ШНУРОВ И КАБЕЛЕЙС РЕЗИНОВОЙ ИЛИ ПЛАСТМАССОВОЙ ИЗОЛЯЦИЕЙ
IH = 87 A
55.
ДОПУСТИМЫЕ ДЛИТЕЛЬНЫЕ ТОКИ ДЛЯ ПРОВОДОВ, ШНУРОВ И КАБЕЛЕЙС РЕЗИНОВОЙ ИЛИ ПЛАСТМАССОВОЙ ИЗОЛЯЦИЕЙ
IH = 87 A
56.
ПРОВЕРКА ПРАВИЛЬНОСТИ ВЫБОРА СЕЧЕНИЯ ЖИЛЫ КАБЕЛЯ НА УСЛОВИЕНЕ ПРЕВЫШЕНИЯ ДОПУСТИМОЙ ТОКОВОЙ НАГРУЗКИ В
ЛЕТНИЙ ПЕРИОД ЭКСПЛУАТАЦИИ
Допустимая (мах) Коррекция
температура
величины длительного
тока
НЕВЫПОЛНЕНИЕ
УСЛОВИЯ!
0
нагрева
жил +65
С
для
различных
условий
прокладки кабельно-проводной
продукции
Требуется корректировка
и температурных условий окружающей
(У среды
В Е Л И Ч Е Н И Е)
сечения жилы кабеля.
IНАГР ≤ It=
Способ прокладки –
в воздухе
It= = IДДТ kКОР
It= = 95 0,79 = 75,1 А
IНАГР = 87,1 А > It= = 75,1 А
Зимний период времени года
Летний период времени года
57.
25. Расчёт сечений жил проводов и кабелей по допустимой потеренапряжения
Сечение жил проводов и кабелей по допустимой потере напряжения в
основном применяется при расчёте:
- о с в е т и т е л ь н ы х с е т е й;
- н а р у ж н ы х в н е ц е х о в ы х с е т е й;
- сетей значительной протяжённости.
Сечение жил проводов и кабелей с одинаковым сечением в линии по всей
длине рассчитывается по формуле:
1. Трёхфазные с сосредоточенной нагрузкой в конце линии
TV
где
Нагрузка
L
М
Р L 10
s
2
U U %
s - сечение жилы, мм2;
Р – расчётная нагрузка, кВт;
L – длина линии, м;
U – линейное напряжение, В;
∆U% - допустимая потеря напряжения в сети, %;
γ – удельная проводимость материала жилы, м/Ом мм2.
5
1
58.
Та
б
л
и
ц
а
с
в
о
й
с
т
в
м
е
т
а
л
л
о
в
Название металла
или сплава
Удельное электрическое сопротивление
ρ, Ом мм2/м
Сопротивление по
сравнению с медью
Серебро
Медь
Золото
Алюминий
Иридий
Молибден
Вольфрам
Цинк
Никель
Железо
Платина
Олово
Свинец
Титан
Висмут
СПЛАВЫ
Латунь
Бронза
Сталь
Манганин
Константан
Нихром
Фехраль
Хромаль
0,015 - 0.016
0,01724 – 0,018
0,023
0,0262 – 0,0295
0,0474
0,054
0,053 – 0,055
0,059
0,087
0,098
0,107
0,12
0,217 – 0,227
0,556 – 0,784
1,2
0,9
1
1,35
1,67
2,8
2,9
3,6
3,7
6,5
7,7
5,5
8,5
13
32
70
0,025 – 0,108
0,095 – 0,1
0,103 – 0,137
0,43 – 0,51
0,5
1,05 – 1,4
1.15 – 1,35
1.3 – 1,5
4,5
5,6
12
26
29
60
67
76
59.
60.
25.1. Расчёт МАКСИМАЛЬНО ДОПУСТИМОЙ ДЛИНЫ ЛИНИИ (кабеля) питанияЭП
L (м) при СТАНДАРТНОМ ВЫБРАННОМ СЕЧЕНИИ ЖИЛЫ КАБЕЛЯ s мм2 (п. 24)
принятым за БАЗОВЫЙ ВАРИАНТ
при нижеприведённых значениях падения напряжения U%
U% = 1%;
L
U% = 3%;
s U U %
2
P 10 5
L U1% =
м
U% = 5%.
Формула для определения максимальной
(допустимой) длины линии при известных
величинах:
- мощности электропотребителя,
- сечения жилы кабеля (провода),
- уровня напряжения питания потребителя,
- допустимого (или желаемого) падения
напряжения в линии.
L U3% =
м
L U5% =
м
61.
25.2. РАСЧЁТ ПАДЕНИЯ НАПРЯЖЕНИЯ U% В ЛИНИИ (кабеле) питания ЭП приСТАНДАРТНОМ ВЫБРАННОМ СЕЧЕНИИ ЖИЛЫ КАБЕЛЯ s (мм2) (п. 24)
принятым за БАЗОВЫЙ ВАРИАНТ
при нижеприведённых значениях длины линии (кабеля) питания ЭП - L (м)
L = 50 м;
U%50 =
U %
L = 100 м;
U%100 =
%
P L 10
s U
5
2
L = 200 м.
%
U%200 =
%
Формула для определения величины
падения
напряжения
в
линии
при
известных величинах:
- мощности электропотребителя,
- длины линии,
- сечения жилы кабеля (провода),
- уровня напряжения питания потребителя.
26.1 Произвести выбор марки силового кабеля (для монтажа цепей питания
АД)
и монтажного установочного провода (для монтажа слаботочной цепи
управления АД) по результатам расчёта п. 24, п. 25.1 и п. 25.2.
26.2 Выбор кабельных и проводных наконечников.
62.
Параметры наконечников НШВИ63.
Наконечники ТМ (ТМЛ, ТМЛ(о), ТА,ТАМ) – используются для обжима жил
кабелей из меди и алюминия посредством
опрессовки для последующего подключения
к шине или оборудованию.
Наконечники бывают двух видов —
медные и алюминиевые.
Первые применяются для подключения
кабелей из меди, а вторые — из алюминия.
Луженые изделия ТМЛ используются
одновременно с проводниками из меди и
алюминия для опрессовывания и пайки.
64.
65.
66.
27. РАСЧЁТ ПОТЕРЬ МОЩНОСТИ В ПИТАЮЩЕЙ ЛИНИИ НАГРУЗКИ(АД с к.з.р.)
Потери активной мощности в линии
при питании трёхфазной нагрузки:
где
2
PЛИН 3 I НАГР
R ЛИН
РЛИН – потери активной мощности в линии при питании трёхфазной
нагрузки (3х-фазного асинхронного электродвигателя), Вт;
IНАГР – ток нагрузки (электродвигателя), А;
RЛИН – активное сопротивление токоведущих жил кабеля (провода), Ом.
27.1. Определение величины активного сопротивления жилы кабеля
(провода).
L
R
s
где
R – активное сопротивление жилы кабеля, Ом;
- удельное активное сопротивление материала жилы кабеля
(провода), Ом мм2/м;
L – длина питающей линии, м;
s – сечение жилы кабеля (провода), мм2.
Расчёт потерь активной мощности РЛИН в питающей линии
производится для ТРЁХ ранее рассмотренных в п.25.1 длинах кабельной
линии и окончательно выбранном сечении жилы кабеля п. 24.
67.
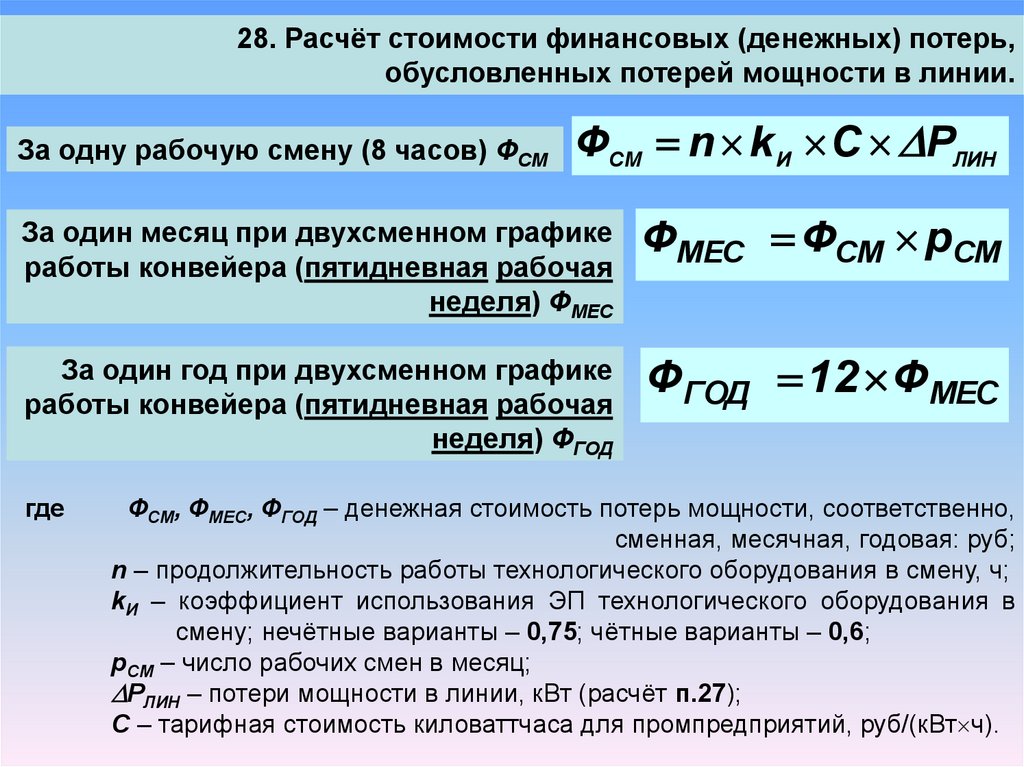
28. Расчёт стоимости финансовых (денежных) потерь,обусловленных потерей мощности в линии.
За одну рабочую смену (8 часов) ФСМ
ФСМ n k И C PЛИН
За один месяц при двухсменном графике
работы конвейера (пятидневная рабочая
неделя) ФМЕС
ФМЕС ФСМ рСМ
За один год при двухсменном графике
работы конвейера (пятидневная рабочая
неделя) ФГОД
ФГОД 12 ФМЕС
где
ФСМ, ФМЕС, ФГОД – денежная стоимость потерь мощности, соответственно,
сменная, месячная, годовая: руб;
n – продолжительность работы технологического оборудования в смену, ч;
kИ – коэффициент использования ЭП технологического оборудования в
смену; нечётные варианты – 0,75; чётные варианты – 0,6;
рСМ – число рабочих смен в месяц;
РЛИН – потери мощности в линии, кВт (расчёт п.27);
С – тарифная стоимость киловаттчаса для промпредприятий, руб/(кВт ч).
68.
29. Расчёт стоимости активной потребляемой мощности , Ф1СМ, руб.За одну рабочую смену (8 часов) Ф1СМ
Ф1СМ n kИ C P1
За один месяц при двухсменном графике
работы конвейера (пятидневная рабочая
неделя) ФМЕС
Ф1 МЕС ФСМ рСМ
За один год при двухсменном графике
работы конвейера (пятидневная рабочая
неделя) ФГОД
Ф1 ГОД 12 ФМЕС
где
Ф1СМ, Ф1МЕС, Ф1ГОД – денежная стоимость активной потребляемой
мощности, соответственно, сменная, месячная, годовая: руб;
n – продолжительность работы технологического оборудования в смену, ч;
kИ – коэффициент использования ЭП технологического оборудования в
смену; нечётные варианты – 0,75; чётные варианты – 0,6;
рСМ – число рабочих смен в месяц;
Р1 – активная потребляемая мощность электродвигателя, кВт (расчёт п. 8);
С – тарифная стоимость киловаттчаса для промпредприятий, руб/(кВт ч).
69.
30. Расчёт реактивной мощности асинхронного трёхфазного, Q, кВАр.Q 3 U ЛИН I ЛИН sin 10 3
где
Q – реактивная мощность трёхфазного АД, кВАр;
UЛИН – линейное напряжение АД, В;
IЛИН – линейный ток АД, А;
φ – фазовый угол между напряжением и током (sinφ рассчитан в п.14)
30.1 Расчёт стоимости реактивной энергии
Расчёт стоимости единицы измерения реактивной мощности,
кВАр, обычно определяется условиями договора предприятия с
энергоснабжающей организацией.
На практике чаще всего используется следующие методики расчёта
стоимости реактивной энергии:
- в случае, если среднемесячный коэффициент мощности нагрузки
(двигателя) cosφ 0,9, при расчёте стоимости реактивной энергии применяется
правило при котором стоимость 1 кВАр = (10 ÷ 15 %) стоимости 1кВт;
- в случае, если реальное значение реактивной мощности составляет
более 50% активной энергии, применяется правило при котором стоимость
1 кВАр = (10 ÷ 15 %) стоимости 1кВт;
- при нагрузках в сети до 63 А – плата за реактивную энергию с
потребителя (предприятия) может НЕ ВЗИМАТЬСЯ.
70.
31. Расчёт стоимости реактивной энергии , ФР, руб.За одну рабочую смену (8 часов) ФР1СМ
Ф1РСМ n k И C ( 0 ,1 0 ,15 ) Q
За один месяц при двухсменном графике
работы конвейера (пятидневная рабочая
неделя) ФМЕС
Ф
Ф
За один год при двухсменном графике
работы конвейера (пятидневная рабочая
неделя) ФГОД
Ф
12 Ф
где
Р
1 МЕС
Р
1ГОД
Р
СМ
рСМ
Р
МЕС
ФР1СМ, ФР1МЕС, ФР1ГОД – денежная стоимость реактивной потребляемой
энергии, соответственно, сменная, месячная, годовая: руб;
n – продолжительность работы технологического оборудования в смену, ч;
kИ – коэффициент использования ЭП технологического оборудования в
смену; нечётные варианты – 0,75; чётные варианты – 0,6;
рСМ – число рабочих смен в месяц;
Q – реактивная потребляемая мощность электродвигателя, кВАр (п.30);
С – тарифная стоимость киловаттчаса для промпредприятий, руб/(кВт ч).
71.
32. Расчёт убытков % финансовых (денежных) потерь,обусловленных потерей мощности в линии, У%.
За одну рабочую смену (8 часов) У%СМ
ФСМ
У %СМ
100%
Ф1СМ
За один месяц при двухсменном графике
работы конвейера (пятидневная рабочая
неделя) У%МЕС
ФМЕС
У %МЕС
100%
Ф1МЕС
За один год при двухсменном графике работы
конвейера (пятидневная рабочая неделя) У%ГОД
У %ГОД
ФГОД
Ф1ГОД
100%
72.
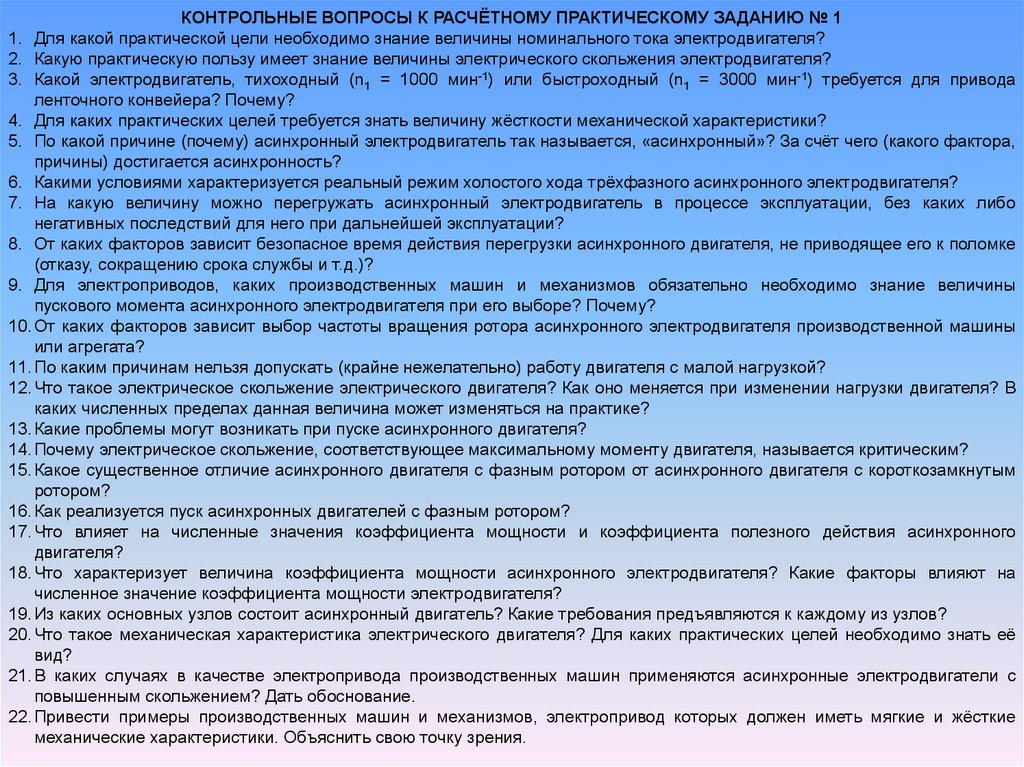
КОНТРОЛЬНЫЕ ВОПРОСЫ К РАСЧЁТНОМУ ПРАКТИЧЕСКОМУ ЗАДАНИЮ № 11. Для какой практической цели необходимо знание величины номинального тока электродвигателя?
2. Какую практическую пользу имеет знание величины электрического скольжения электродвигателя?
3. Какой электродвигатель, тихоходный (n1 = 1000 мин-1) или быстроходный (n1 = 3000 мин-1) требуется для привода
ленточного конвейера? Почему?
4. Для каких практических целей требуется знать величину жёсткости механической характеристики?
5. По какой причине (почему) асинхронный электродвигатель так называется, «асинхронный»? За счёт чего (какого фактора,
причины) достигается асинхронность?
6. Какими условиями характеризуется реальный режим холостого хода трёхфазного асинхронного электродвигателя?
7. На какую величину можно перегружать асинхронный электродвигатель в процессе эксплуатации, без каких либо
негативных последствий для него при дальнейшей эксплуатации?
8. От каких факторов зависит безопасное время действия перегрузки асинхронного двигателя, не приводящее его к поломке
(отказу, сокращению срока службы и т.д.)?
9. Для электроприводов, каких производственных машин и механизмов обязательно необходимо знание величины
пускового момента асинхронного электродвигателя при его выборе? Почему?
10. От каких факторов зависит выбор частоты вращения ротора асинхронного электродвигателя производственной машины
или агрегата?
11. По каким причинам нельзя допускать (крайне нежелательно) работу двигателя с малой нагрузкой?
12. Что такое электрическое скольжение электрического двигателя? Как оно меняется при изменении нагрузки двигателя? В
каких численных пределах данная величина может изменяться на практике?
13. Какие проблемы могут возникать при пуске асинхронного двигателя?
14. Почему электрическое скольжение, соответствующее максимальному моменту двигателя, называется критическим?
15. Какое существенное отличие асинхронного двигателя с фазным ротором от асинхронного двигателя с короткозамкнутым
ротором?
16. Как реализуется пуск асинхронных двигателей с фазным ротором?
17. Что влияет на численные значения коэффициента мощности и коэффициента полезного действия асинхронного
двигателя?
18. Что характеризует величина коэффициента мощности асинхронного электродвигателя? Какие факторы влияют на
численное значение коэффициента мощности электродвигателя?
19. Из каких основных узлов состоит асинхронный двигатель? Какие требования предъявляются к каждому из узлов?
20. Что такое механическая характеристика электрического двигателя? Для каких практических целей необходимо знать её
вид?
21. В каких случаях в качестве электропривода производственных машин применяются асинхронные электродвигатели с
повышенным скольжением? Дать обоснование.
22. Привести примеры производственных машин и механизмов, электропривод которых должен иметь мягкие и жёсткие
механические характеристики. Объяснить свою точку зрения.
73.
23. Какие модификации асинхронных электродвигателей существуют в настоящее время и применяются на практике вкачестве ЭП производственных машин?
24. Какими факторами обуславливается выбор степени защиты (IP**) асинхронного электродвигателя производственной
машины (механизма)?
25. Какие системы (способы) охлаждения электрических двигателей существуют в настоящий момент времени?
26. Перечень мероприятий по подготовке электродвигателя к работе.
27. Способы сопряжения электродвигателей с производственными агрегатами? Преимущества и недостатки способов?
28. Какие виды электрических защит асинхронных электродвигателей должны быть реализованы на практике применения
ЭП производственных машин и механизмов?
29. Мероприятия, выполняемые при пуске электродвигателя в работу на производственном механизме.
30. Наиболее часто встречаемые неисправности электрических двигателей на практике и способы их обнаружения?
31. Произвести расшифровку обозначения приведённых типов электродвигателей: 1. 4АА50А4У3; 2. 4АН200L2У3; 3.
4А132S6/4/2У3; 4. 4АНК280М4У3; 5. 4АР160S2У3; 6. 4А90L2ХУ3; 7. 4А132S2Т2; 8. 4А160М6НУ3; 9. 4А112М6ЕУ3; 10.
4А132SХЛ2; 11. 4АС200L6У3; 12. 4А160М4СХУ2; 13. АИР80А2; 14. АИР80В4; 15. 5АМХ132S4; 16. АИР100S4; 17.
АИР90L4; 18. RA160M4; 19. RA100LB4; 20. RA160MB8.
32. Перечислить номинальные высоты оси вращения электродвигателей серии 4А, 5А, RA основного исполнения.
33. Чем определяется допустимая температура нагрева электродвигателя?
34. Какие существуют модификации и исполнения асинхронных двигателей?
35. Что такое степень защиты двигателя?
36. Что такое способ монтажа двигателя?
37. Чем отличаются друг от друга закрытые электродвигатели от защищённых электродвигателей?
38. Перечислить стандартный ряд мощностей асинхронных двигателей.
39. Какие существуют категории мест размещения двигателей при эксплуатации?
40. Какие существуют способы охлаждения электродвигателей?
41. Требования, предъявляемые к фундаментам двигателей?
42. К чему приводит повышенный уровень вибрации двигателя при работе?
43. Для чего требуется соблюдать правильный порядок сборки резьбового контактного соединения в клеммной коробке
электродвигателя?
44. Для какой цели должна проводиться проверка сопротивления изоляции электродвигателя?
45. Почему встроенная температурная защита электродвигателей является более действенной по сравнению с внешними
аппаратами защиты от перегрузок (тепловыми реле, автоматическими выключателями)?
46. Перечислить правильный порядок разборки двигателя при замене подшипников.
47. По каким критериям производится определение дефектов подшипников электродвигателей?
48. По какой причине нагревают соединительную муфту до температуры не более +80 0 С при посадке на вал двигателя?
49. Для чего требуется соблюдать плоскостность монтажных поверхностей фундамента и двигателя?
50. Почему недопустимо подключение жил силового питающего кабеля без специальных (кабельных) наконечников к
выводам обмоток двигателя?
74.
ПРИМЕРЭЛЕКТРИЧЕСКОЙ
ПРИНЦИПИАЛЬНОЙ
РЕЛЕЙНОЙ
СХЕМЫ
УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДА
Э
П
Р
С
У
ЭП
ТРЁХСЕКЦИОННОГО КОНВЕЙЕРА
Функциональные возможности ЭПРСУ,
режимы работы,
техническая реализация,
схемные решения
75.
В составе конвейера имеется три секции (звена)индивидуальными электрическими двигателями в качестве приводов.
Секции конвейера
двигателей М1, М2 и М3.
приводятся
в
движение
при
с
помощью
Двигатели М1, М2 и М3 – трёхфазные АД с короткозамкнутым
ротором.
При
установке
переключателя
SA
в
положение
осуществляется раздельное (местное) управление двигателями.
При установке ключа SA в положение
централизованное (автоматическое) управление.
«3»
«1»
реализуется
При выборе местного режима работы двигатели включаются
раздельно кнопками «ПУСК» SB2, SB4 и SB6, а отключаются,
соответственно, кнопками «СТОП» SB3, SB5 и SB7.
В автоматическом режиме пуск конвейера осуществляется кнопкой
SB1 и сопровождается подачей звукового сигнала перед пуском на время
∆t звуковой сигнализацией.
Положение «2» переключателя SA соответствует режиму отдыха
(режим блокировки работы ЭП).
76.
РАБОТА КОНВЕЙЕРА В МЕСТНОМ РЕЖИМЕ.Переключатель SA необходимо установить в положение «1».
При нажатии кнопки SB2 питание поступает на обмотку контактора
КМ1, он срабатывает, и замыкаются все его контактов в силовой и
слаботочной цепях управления.
Включается (запускается) двигатель М1.
Для отключения двигателя М1 используется кнопка «СТОП» SB3.
Аналогично включаются и отключаются все другие электрические
двигатели М2 и М3 звеньев (секций) конвейера соответствующими
кнопками управления.
Порядок включения двигателей произвольный, по усмотрению
оператора.
В местом режиме работы количество работающих (включенных)
двигателей также может быть произвольным.
НЕОБХОДИМОСТЬ НАЛИЧИЯ МЕСТНОГО РЕЖИМА РАБОТЫ ЭП ПТС
Проведение наладочных, диагностических и ремонтных видов работ
с ЭП и рабочими органами производственного механизма (машины).
77.
АВТОМАТИЧЕСКИЙ РЕЖИМ РАБОТЫ ЭП КОНВЕЙЕРА.Работа конвейера в автоматическом режиме начинается
установки (переключения) переключателя SA в положение «3».
После нажатия кнопки SB1 включается
звуковая сигнализация – звучит сирена НА.
с
предупредительная
Напряжение поступает на обмотку реле времени КТ.
С задержкой во времени замыкается его контакт, и питание
подается на реле сигнализации К1.
Замыкаются три контакта реле сигнализации К1, один контакт К1
обеспечивают включение катушки управления КМ1, два других контакта К1
подготавливают к дальнейшему включению цепи питания контакторов КМ2
и КМ3.
Питание поступает на катушку управления контактора КМ1.
Контактор КМ1 срабатывает, замыкаются его контакты, включается
(начинает работать) двигатель М1, левая секция приводится в движение .
78.
При включении контактора КМ1 контактом КМ1 включается релеК2, замыкаются два его контакта (один контакт К2 обеспечивает
самопитание катушки КМ1, второй контакт К2 обеспечивает питание в цепи
управление катушки КМ2), питание подается на обмотку контактора КМ2,
замыкаются его контакты, запускается двигатель М2 (средняя секция
приводится в движение).
При включении контактора КМ2 контактом КМ2 включается реле
К3, замыкаются два его контакта, срабатывает контактор КМ3, замыкаются
его контакты, запускается двигатель М3 (правая секция приводится в
движение).
Реле К4 и его контакт необходим для самопитания катушки
управления контактора КМ3 после отпускания кнопки автоматического
пуска SB1 и последующего отключения реле сигнализации К1 и
размыкания его контактов в цепях управления.
При ручном отключении контакторов управления в данном
режиме при помощи переключателя SA, все электродвигатели
отключаются одновременно.
При аварийном отключении контакторов управления в данном
режиме
соблюдается
избирательный
принцип
отключения
электродвигателей (определённый порядок).
Легко видеть, что все принципы управления конвейерами в данной ЭПРСУ соблюдаются.
79.
Схемауправления
ЭП
трехсекционного
конвейера
80.
НЕДОСТАТКИПРЕДСТАВЛЕННОГО ВАРИАНТА
ЭПРСУ
ПТС
1.
2.
3.
4.
5.
КОНКРЕТНЫЕ
ТЕХНИЧЕСКИЕ и СХЕМНЫЕ
РЕШЕНИЯ ПО МОДЕРНИЗАЦИИИ
ПРЕДСТАВЛЕННОГО ВАРИАНТА
ЭПРСУ ПТС
81.
2. СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМАПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
Точки подачи груза
Точка
доставки
груза
Точка
доставки
груза
1
3
SQ1
SQ2
2
4
SQ1
SQ4
ПУ № 1
ПУ № 2
82.
3. Разработать электрическую принципиальную релейную схемууправления (ЭПРСУ) электроприводом ленточного односекционного
реверсивного конвейера:
Функциональные возможности ЭПРСУ:
3.1 предусмотреть наличие двух режимов работы ЭП: ручной
дистанционный/автоматический (выбор режима работы должен осуществляться
ключом управления);
3.2 ручное дистанционное управление ЭП с двух рабочих мест;
3.3 работа ЭП в длительном режиме работы при перемещении груза из точки 1
в точку 3 и из точки 2 в точку 4 при выборе любого режима работы (п.1);
3.4 автоматический останов ЭП в функции «пути» в двух точках доставки груза
(точки 3, 4) при выборе любого режима работы (п.1);
3.5 наличие предупредительной световой и звуковой сигнализации перед
пуском ЭП на время действия Δt1 периодического вида действия с регулируемыми
периодами времени импульса ΔtИ и паузы ΔtП (диаграмма работы реле времени № 8);
3.6 автоматическое включение ЭП по окончанию времени действия
предупредительной звуковой и световой сигнализации (промежуток времени действия
Δt1 ) при выборе любого режима работы (п.1).
Примечание к п,6: Отключение сигнализации при включении ЭП;
3.7 невозможность ручного дистанционного пуска ЭП при отсутствии груза в
точках подачи 1 или 2 (наличие технологической блокировки);
3.8 возможность исключения действия технологической блокировки при
помощи ключа управления при управлении ЭП при выборе ручного режима работы
(функциональная возможность изложенная в пункте 7);
83.
3.9 автоматическое включение ЭП при выборе режима «автоматический» приналичии груза в точках подачи 1 или 2 после выполнения требований, изложенных в
п.5;
3.10 автоматическое отключение ЭП в функции времени Δt2 после включения
ЭП в том случае, если время работы ЭП по перемещению груза из точек подачи груза 1
или 2 в точки доставки груза 3 или 4 превышает стандартное время перемещения груза
при работе установки;
3.11 возможность блокирования действий, изложенных в п. 3.10 задания;
3.12 невозможность повторного ручного дистанционного пуска ЭП в любом
направлении подачи груза в случае останова ЭП конвейера в функции времени Δt2 без
осуществления предварительного ручного дистанционного одновременного снятия
сигнала запрета и отключения тревожной световой и звуковой сигнализации (п. 3.14);
3.13 наличие и схемная реализация электрических защит и блокировок
электропривода и схемы управления, согласно режима работы и обеспечения
безопасных условий работы обслуживающего персонала;
3.14 наличие световой сигнализации:
1 – направления движения ЭП;
2 – нахождения груза в точках подачи груза 1 и 2;
3 – нахождения груза в точках доставки 3 и 4;
4 – выбора режима включения/отключения действия технологической
блокировки (п. 7/8);
3.15 наличие звуковой и световой сигнализации срабатывания режима
отключения ЭП в функции времени Δt2 после включения.
84.
4. Произвести расчёт параметров и определить требуемые техническиехарактеристики и параметр электрической аппаратуры, используемой в схеме
управления.
5. Осуществить выбор электрической аппаратуры по каталогам заводов
изготовителей.
Исходными данными для расчёта параметров и определения технических
характеристик электрической аппаратуры являются:
- мощность ЭП;
- схемные и аппаратные решения (реализации) принятые при разработке
электрической
принципиальной
релейной
схемы
управления
электропривода
производственной установки.
Автоматические включатели (QF, SF)
Электротепловые реле (КК)
Реле времени (KT)
Ключи управления (SA )
Звуковая и световая аппаратура
сигнализации (HA, HL)
Магнитные пускатели (KM)
Промежуточные реле (KL)
Кнопки управления (SB)
Конечные (путевые)
включатели (SQ)
Кабельно-проводная продукция
6. Разработать логическую программу управления электропривода в
LOGO!Soft Comfort (V7.0).
85.
УСЛОВИЯ ВЫБОРА АППАРАТУРЫ УПРАВЛЕНИЯЭЛЕКТРИЧЕСКИМИ ЦЕПЯМИ
Общими условиями выбора аппаратуры данной группы является
выполнение следующих условий:
• номинальный ток главной цепи аппарата IНОМ.АП. должен быть
больше или равен длительно действующему номинальному току
нагрузки IНАГР. (двигателя, нагревателя, светильника, звонка и т.д.), т.е.
должно выполняться условие
IНОМ.АП ≥ IНАГР.;
• номинальное (рабочее) напряжение главной цепи аппарата
UНОМ.АП. должно быть больше или равно рабочему напряжению
(напряжению питания) нагрузки UНАГР., т.е. должно выполняться
условие
UНОМ.АП. ≥ UНАГР.;
• коммутируемая мощность главных цепей аппарата РКОМ.ГЛ.Ц. должна
быть больше или равна мощности потребления нагрузки РПОТР.НАГР., т.е.
должно выполняться условие
РКОМ.ГЛ.Ц. ≥ РПОТР.НАГР.;
86.
• исполнение и число контактных групп должно отвечатьвыполняемым функциям (включение, отключение или переключение
электрических цепей (участков));
• степень защиты аппаратов (IP**) от внешних воздействий
окружающей среды должна соответствовать условиям эксплуатации
аппаратуры (пыле-, брызго-, влагозащищённое исполнение и т.д.);
• способ
управления
аппаратом
должен
предъявляемым
требованиям
(ручное,
автоматическое управление).
соответствовать
дистанционное,
87.
При реализации максимально-токовой защиты при помощивоздушных автоматических выключателей условиями выбора уставок
расцепителей являются следующие условия :
• для АД с короткозамкнутым ротором (QF) ЗХ - К
Iуст. э. м. р. ≥ ( 1,2 1,3) Iпуск. дв ,
• для потребителей схем управления (SF) ЗХ - Z
Iуст. э. м. р. = 2,5 Iу. ∑ ,
где
Iуст.э.м.р. – ток уставки электромагнитного расцепителя автоматического выключателя, А;
Iпуск.дв – пусковой ток электродвигателя, А;
Iу.∑ - суммарный ток максимального количества одновременно
включенных потребителей в схеме управления, А.
Меньшие значения коэффициентов выбираются для нормальных
(лёгких) условий пуска, большие значения – для тяжёлых условий пуска.
88.
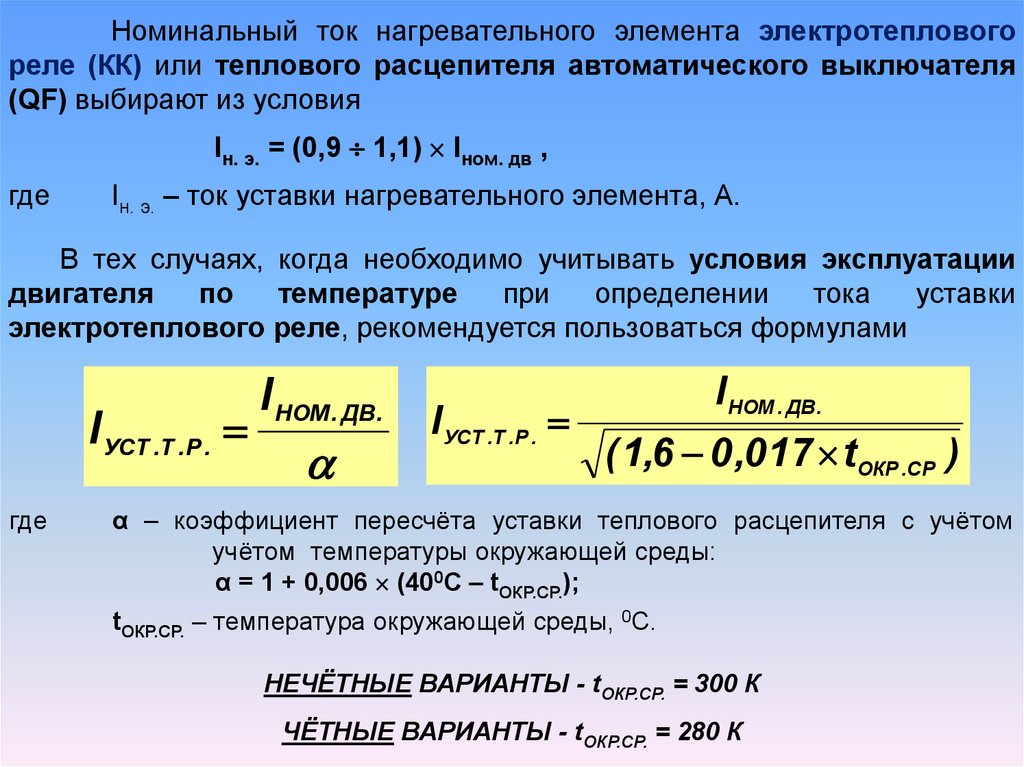
Номинальный ток нагревательного элемента электротепловогореле (КК) или теплового расцепителя автоматического выключателя
(QF) выбирают из условия
Iн. э. = (0,9 1,1) Iном. дв ,
где
Iн. э. – ток уставки нагревательного элемента, А.
В тех случаях, когда необходимо учитывать условия эксплуатации
двигателя
по
температуре
при
определении
тока
уставки
электротеплового реле, рекомендуется пользоваться формулами
I УСТ .Т .Р .
где
I НОМ . ДВ.
I УСТ .Т .Р .
I НОМ . ДВ.
( 1,6 0 ,017 t ОКР .СР )
α – коэффициент пересчёта уставки теплового расцепителя с учётом
учётом температуры окружающей среды:
α = 1 + 0,006 (400С – tОКР.СР.);
tОКР.СР. – температура окружающей среды, 0С.
НЕЧЁТНЫЕ ВАРИАНТЫ - tОКР.СР. = 300 К
ЧЁТНЫЕ ВАРИАНТЫ - tОКР.СР. = 280 К
89.
ВЫБОР: АВТОМАТИЧЕСКИЕ ВЫКЛЮЧАТЕЛИКаталог КЭАЗ ОПТИМА 2022
Страница 10 - 12 – АВ МОДУЛЬНОГО ТИПА OptiDin BM63 IНОМ до 63 А
СТРУКТУРА УСЛОВНОГО ОБОЗНАЧЕНИЯ – страница 10.
АРТИКУЛ ЗАКАЗА АВ – страница 16.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ – страница 12, 17 .
ПРОВЕРКА ПРАВИЛЬНОСТИ ВЫБОРА РАСЦЕПИТЕЛЯ ПО ВТХ
(время-токовая характеристика) – страница 127.
Страница 314 – АВ защиты двигателя OptiStart MP
СТРУКТУРА УСЛОВНОГО ОБОЗНАЧЕНИЯ – страница 314
АРТИКУЛ ЗАКАЗА АВ / РУКОВОДСТВО ВЫБОРА – страница 316.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ – страница 317.
90.
ВЫБОР: ЭЛЕКТРОТЕПЛОВЫЕ РЕЛЕ (КК)Каталог КЭАЗ ОПТИМА 2022
страница 384 – OptiStart TU в комплекте с
OptiStart K Контакторы электромагнитные
СТРУКТУРА УСЛОВНОГО ОБОЗНАЧЕНИЯ – страница 384.
АРТИКУЛ ЗАКАЗА ЭТР – страница 386.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ – страница 386.
ВЫБОР: ЭЛЕКТРОТЕПЛОВЫЕ РЕЛЕ
Каталог КЭАЗ 2023
страница 370 – РТЛ (KK) в комплекте с
ПМЛ/ПМ12
СТРУКТУРА УСЛОВНОГО ОБОЗНАЧЕНИЯ – страница 370.
АРТИКУЛ ЗАКАЗА ЭТР – страница 373.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ – страница 372.
91.
ВЫБОР: ЭЛЕКТРОМАГНИТНЫЕ КОНТАКТОРЫ (КМ)Каталог КЭАЗ ОПТИМА 2022 - OptiStart K Контакторы
электромагнитные
страница 408
Каталог КЭАЗ 2023 – ПМЛ / ПМ12 Контакторы
электромагнитные
страница 320 – ПМЛ
страница 346 – ПМ12
Контактные приставки ПКЛ
страница 382 - 384
ВЫБОР: КНОПКИ УПРАВЛЕНИЯ (SB)
Каталог КЭАЗ 2023
страница 405 - кнопки серия КЕ
страница 409 – кнопочные посты ПКЕ
92.
ВЫБОР: СВЕТОСИГНАЛЬНЫЕ ИНДИКАТОРЫ (HL)Каталог КЭАЗ 2023
страница 414 - серия AD22DS
ВЫБОР : ВЫКЛЮЧАТЕЛИ ПУТЕВЫЕ (КОНЦЕВЫЕ)
Каталог КЭАЗ 2023
страница 416- серия ВПК, ВП 15
ВЫБОР: КЛЮЧИ УПРАВЛЕНИЯ
(SА)
Каталог Ключи управления 4G 2019
страница 24- серия 4G
схема 54, 55, 56
(SQ)
93.
ВЫБОР: КАБЕЛЬНАЯ И ПРОВОДНАЯ ПРОДУКЦИЯКаталог Азовская кабельная компания 2019
страница 82 - марка ВВГ
Каталог REMZ (г. Рыбинск)
страница 18 / 21 / 24 – ВВГ / ВВГнг(А) / ВВГнг (А)- LS
Каталог Севкабель
страница 265 – 267 – провод с ПВХ изоляцией (установочный
монтажный)
Марки: ПуВнг(В)-LS, ПуГВнг(В)-LS
H05V-R, H05V-K, H07V-R, H07V-K
94.
95.
96.
ВЫБОР РЕЛЕ ВРЕМЕНИДиаграмма работы № 8 реле времени
97.
98.
99.
100.
УСЛОВИЯ ВЫБОРА АППАРАТУРЫ ЗАЩИТЫ ЭЛЕКТРОПРИВОДОВ ИСХЕМ УПРАВЛЕНИЯ
К данной группе аппаратуры относятся плавкие предохранители,
автоматические воздушные выключатели, реле защиты (электротепловые реле,
максимально-токовые реле, минимально-токовые реле, реле максимального
напряжения, реле минимального напряжения).
Единым условием выбора аппаратуры данной группы является выбор по
номинальному длительно действующему току и номинальному напряжению
главных цепей (токопроводящей арматуры) аппаратов (как и при выборе
аппаратуры управления электрическими цепями).
Численные значения данных величин должны быть больше или равны
одноимённым величинам защищаемых электрических цепей или их участков.
В электрических цепях аппараты защиты должны быть установлены таким
образом, чтобы через них проходил весь ток защищаемого участка электрической
цепи.
Более подробно вопрос выбора данной аппаратуры и условия выбора для
реализации различных видов защит рассмотрен в прилагаемом к заданию № 1
учебном пособии «Электропривод и автоматизация оборудования лесного
комплекса» для направления подготовки 15.03.02, в разделе 3 (пункт 3.1)
101.
УСЛОВИЯ ВЫБОРА ЗВУКОВОЙ И СВЕТОВОЙ АППАРАТУРЫ СИГНАЛИЗАЦИИ(ОПОВЕЩЕНИЯ)
Звукосигнальная аппаратура выбирается по:
- роду тока; переменного и постоянного тока;
- рабочему напряжению питания; 220, 127, 110, 36, 12 вольт;
- потребляемой мощности; ВА (Вт);
- режиму работы; длительный, повторно-кратковременный;
- времени непрерывной работы;
- силе звука (звуковому давлению) дБ;
- климатическое исполнение (диапазон рабочих температур)
- исполнение по степени защиты (IP**).
Светосигнальная арматура (аппаратура) выбирается по:
- роду тока; переменного и постоянного тока;
- рабочему напряжению питания; 220, 127, 110, 36, 12 вольт;
- потребляемой мощности; ВА (Вт);
- силе светового потока: кД;
- энергия импульса света: Дж;
- по виду источника света: светодиод, неоновая, люминесцентная лампа;
- способ монтажа: утопленный, на панели;
- варианту свечения: постоянный, мигающий;
- конфигурации поверхности (форме сигнального элемента): круглой, квадратной,
прямоугольной формы;
- исполнению корпуса: круглый, квадратный;
- цвету светофильтров (или цвету свечения);
- климатическое исполнение (диапазон рабочих температур)
- исполнение по степени защиты (IP**).
102.
Виды светосигнальной арматурыСовременная
светосигнальная
арматура
использует
следующие
источники света: СКЛ (светодиодные коммутаторные лампы), неоновые и
люминесцентные.
Самым популярным световым элементом является led-арматура, которая
отличается высоким качеством и изготавливается по самым инновационным
технологиям.
Светодиодные лампы гарантируют яркий свет, а также характеризуются
низким показателем отказа при работе. Последняя характеристика именуется
повышенной отказоустойчивостью.
Арматура СКЛ – это самая эффективная и надежная альтернатива
устаревшим классическим лампам накаливания, которые ранее использовались в
автоматике, регулирующих и контролирующих устройствах.
Звонки электрические громкого боя МЗМ-1 220В, предназначены для
подачи мощных звуковых сигналов, отличающихся от производственных шумов,
обеспечивающих хорошую слышимость сигналов на значительном расстоянии в
системах сигнализации, в том числе системах сигнализации электроприводов.
Оповещатель звуковой предназначен для работы при температуре
окружающего воздуха от -400С до +500С и относительной влажности 95±3% при
350С. Вид климатического исполнения УХЛ и категория размещения 1 по
ГОСТ15150 – 69.
Кроме звонков громкого боя применяются сирены сигнальные СС-1 или
взрывозащищённые посты сигнализации ПСВ-С-51 УХЛ5.
103.
УСЛОВИЯ ВЫБОРА КАБЕЛЬНО-ПРОВОДНОЙ ПРОДУКЦИИПравильный выбор кабельно-проводной продукции заключает в выборе
сечения жилы кабеля (провода), исполнения по условиям эксплуатации и
количества жил, которые должны отвечать предъявляемым требованиям в
зависимости от условия выбора.
Подробно о условиях выбора проводов и кабелей изложено в разделе 9
учебного пособия «Электропривод и автоматизация оборудования лесного
комплекса» для направления подготовки 15.03.02.