















 electronics
electronicsSimilar presentations:










Вводный курс по БПЛА
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
Винтомоторная группа(ВМГ)Винт
Двигатель
Узел крепления
12.
Винт. Маркировка. Характеристики.Маркировка пропеллеров состоит из 3 чисел: DP5х4.5х3V
5 – диаметр винта, 4.5 – шаг винта, 3 – кол-во лопастей
Краткая запись маркировки будет выглядеть так: 5045
50 – 5 дюймов, 45 – шаг 4.5.
Маркировка пропеллеров состоит из 3 чисел: D11х6х2V
11 – диаметр винта, 6 – шаг винта, 2 – кол-во лопастей
Краткая запись маркировки будет выглядеть так: 1160
11 – 11 дюймов, 60 – шаг 6.
Диаметром винта называется диаметр
окружности, описываемой концами
лопастей при вращении винта.
Имеется прямая зависимость тяги от
D винта, при равнозначных других
параметрах.
Двухлопастные
Шаг винта
Диаметр винта
2
3
Геометрический шаг винта - это
расстояние, которое винт должен
пройти за один свой полный
оборот, если бы он двигался в
воздухе как в твердой среде.
Больше шаг – выше скорость.
Меньше шаг – выше грузоподьемность.
Четырехлопастные
Трехлопастные
Многолопастные
Материал изготовления
Пластик – не самый удачный вариант, но обладает
низкой ценой и очень широки ассортиментом.
Углеродное волокно – Очень дорого, но очень круто.
Великолепная жёсткость, лёгкость. Легко сбалансировать.
Композит – внутри пластик, снаружи покрытие из
углеродного волокна. Дешевизна пластика, жёсткость и
износостойкость (почти) как у карбоновых пропеллеров.
Также не очень высокая цена.
13.
Двигатель. Маркировка. Характеристики.Обычно это 4-значное число, которое выглядит
примерно как «2205». Первые две цифры этого числа —
это диаметр (в мм) статора, а второй — это высота (также
в мм).
2205 – самые популярные моторы, на них можно
ставить 5-и дюймовые трехлопастные пропеллеры.
2206 – набирающая популярность модель двигателей,
имеет немного большие габариты за счет увеличения
мощности на 15% в сравнении с 2205.
Размер двигателя – чем габаритнее, тем больше мощности
двигатель может обрабатывать и чем больше крутящего
момента он будет генерировать. Однако нюанс заключается в
том, что большие цифры означают более тяжелый двигатель —
в основном благодаря тому, что он просто «больше».
Вал. Должен быть достаточно длинным, но не менее 13
мм в длину и 5мм в диаметре. 5мм это самый
распространённый диаметр у пропеллеров, в
противном случае вам придется рассверливать или
покупать новые пропы, так как они или не налезут или
Kv - показывает максимальное количество оборотов в минуту, будут маленькие.
которое сможет выдать ваш мотор. Можно узнать, если Энергоэффективность (КПД) - Комплексное понятие,
умножить kV на напряжение аккумулятора. Так, если у вас которое зависит ещё и от батареи, контроллера,
двигатель 2300kV и батарея lipo 4s, то будет такая формула, так пропеллера, и даже проводов. Чем выше, тем лучше.
как у 4s lipo напряжение 16.8 вольт:
Двигатель с КПД 90% тратит 90% потреблённой энергии
16.8 * 2300 = 38640RPM.
на полёт, а 10% на обогрев окружающей.
Вес. Тяжелые моторы обычно
компенсируют свой вес тягой.
довольно
мощные
и Температура нагрева в работе.
Как уже понятно - напрямую зависит от КПД. Чем
Цена - одно из важных значений, чем выше цена, тем больше греется, тем больше тратит энергии впустую.
0
качественнее компоненты и сборка, а значит и большие Не желательно греть двигатель > 80 С, из -за этого
результаты по мощности, скорости, долговечности, надежности. теряются магнитные свойства ферромагнетиков.
14.
ЭлектроникаПолетный контроллер
Аккумулятор
Система видеопередачи
Регулятор оборотов
FPV камера
Система управления
Антенны
15.
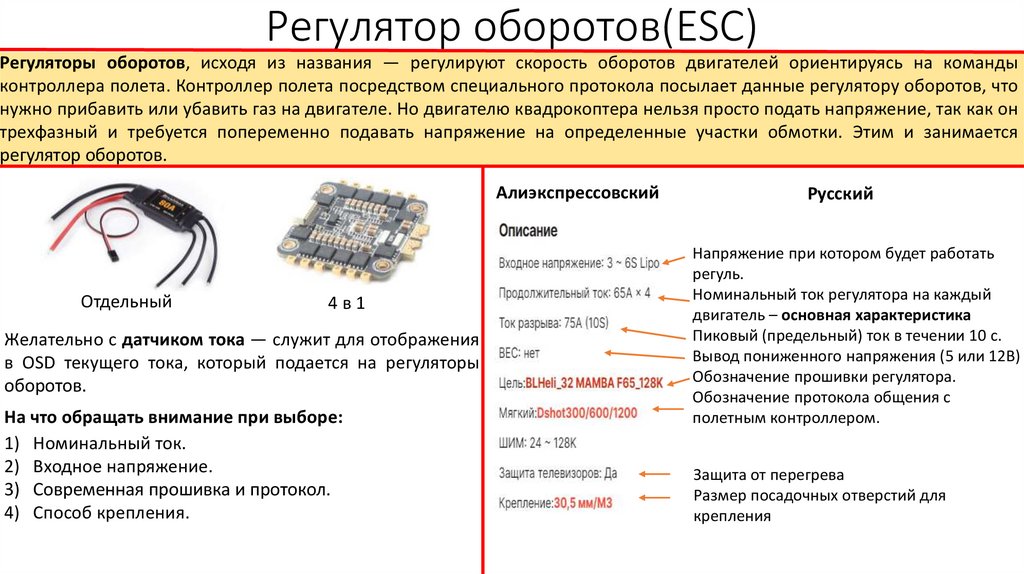
Регулятор оборотов(ESC)Регуляторы оборотов, исходя из названия — регулируют скорость оборотов двигателей ориентируясь на команды
контроллера полета. Контроллер полета посредством специального протокола посылает данные регулятору оборотов, что
нужно прибавить или убавить газ на двигателе. Но двигателю квадрокоптера нельзя просто подать напряжение, так как он
трехфазный и требуется попеременно подавать напряжение на определенные участки обмотки. Этим и занимается
регулятор оборотов.
Алиэкспрессовский
Отдельный
4в1
Желательно с датчиком тока — служит для отображения
в OSD текущего тока, который подается на регуляторы
оборотов.
На что обращать внимание при выборе:
1) Номинальный ток.
2) Входное напряжение.
3) Современная прошивка и протокол.
4) Способ крепления.
Русский
Напряжение при котором будет работать
регуль.
Номинальный ток регулятора на каждый
двигатель – основная характеристика
Пиковый (предельный) ток в течении 10 с.
Вывод пониженного напряжения (5 или 12В)
Обозначение прошивки регулятора.
Обозначение протокола общения с
полетным контроллером.
Защита от перегрева
Размер посадочных отверстий для
крепления
16.
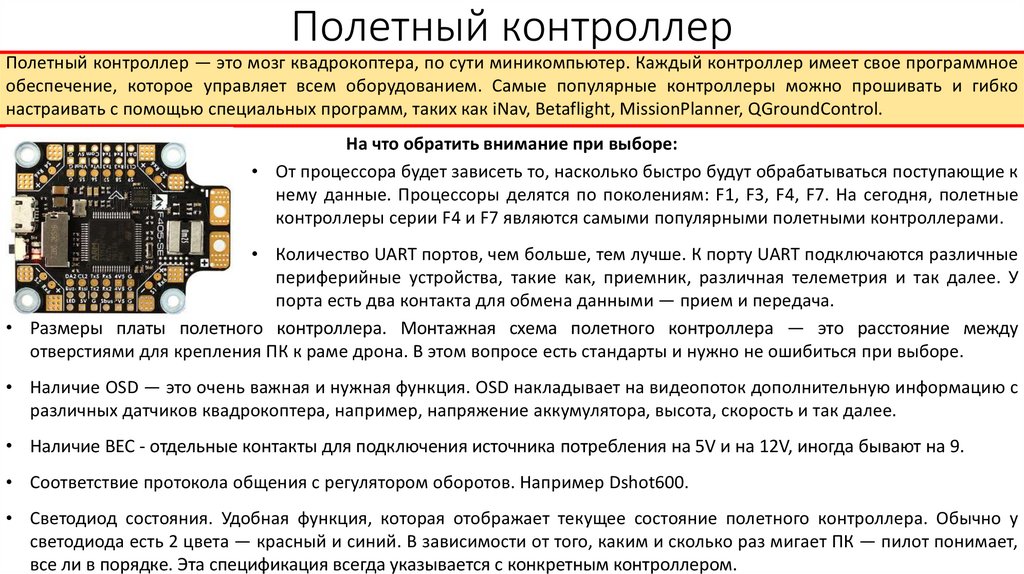
Полетный контроллерПолетный контроллер — это мозг квадрокоптера, по сути миникомпьютер. Каждый контроллер имеет свое программное
обеспечение, которое управляет всем оборудованием. Самые популярные контроллеры можно прошивать и гибко
настраивать с помощью специальных программ, таких как iNav, Betaflight, MissionPlanner, QGroundControl.
На что обратить внимание при выборе:
• От процессора будет зависеть то, насколько быстро будут обрабатываться поступающие к
нему данные. Процессоры делятся по поколениям: F1, F3, F4, F7. На сегодня, полетные
контроллеры серии F4 и F7 являются самыми популярными полетными контроллерами.
• Количество UART портов, чем больше, тем лучше. К порту UART подключаются различные
периферийные устройства, такие как, приемник, различная телеметрия и так далее. У
порта есть два контакта для обмена данными — прием и передача.
• Размеры платы полетного контроллера. Монтажная схема полетного контроллера — это расстояние между
отверстиями для крепления ПК к раме дрона. В этом вопросе есть стандарты и нужно не ошибиться при выборе.
• Наличие OSD — это очень важная и нужная функция. OSD накладывает на видеопоток дополнительную информацию с
различных датчиков квадрокоптера, например, напряжение аккумулятора, высота, скорость и так далее.
• Наличие BEC - отдельные контакты для подключения источника потребления на 5V и на 12V, иногда бывают на 9.
• Соответствие протокола общения с регулятором оборотов. Например Dshot600.
• Светодиод состояния. Удобная функция, которая отображает текущее состояние полетного контроллера. Обычно у
светодиода есть 2 цвета — красный и синий. В зависимости от того, каким и сколько раз мигает ПК — пилот понимает,
все ли в порядке. Эта спецификация всегда указывается с конкретным контроллером.
17.
Система видеопередачи и камераСистема видеопередачи состоит из FPV камеры, передающего устройства(передатчика) и принимающего
устройства(приемника), зачастую, уже встроенного в FPV шлем или очки. Бывают цифровые и аналоговые устройства.
В случае с аналоговым сигналом приемник и передатчик должны поддерживать одинаковую частотную сетку и разбивку
по каналам “A”, “B”, “C”, “D”, или “R”. Если цифровые, то устройства должны поддерживать общий протокол связи.
Камера — это зрение системы
FPV. Записывает видео в
реальном времени, передает
визуальную
информацию,
которая является обратной
связью для оператора.
1. Разрешение и качество
изображения
2. Поле обзора (FOV)
3. Эффективность при слабом
освещении
4. Задержка
5. Форм-фактор
Видеопередатчик — это устройство,
которое принимает аналоговый или
цифровой видеосигнал с FPV камеры,
обрабатывает его и транслирует на
ваше принимающее устройство.
1.
2.
3.
4.
Выходная мощность
Радиодиапазон для передачи видео
Каналы и группы
Совместимость видеопередатчика с
аппаратурой
5. Форм-фактор
6. Разъем для антенны
7. Напряжение
Принимающее устройство — это место, где
пилот просматривает видео в реальном
времени. Они варьируются от простых
экранов до сложных очков, обеспечивающих
эффект погружения.
1.
2.
3.
4.
5.
6.
Совместимость с видеопередатчиком
Чувствительность
Разрешение
Поле обзора очков
Комфорт и посадка
Регулировки
18.
Система связиСистема связи состоит из аппаратуры управления(пульт) и принимающего устройства(приемник). Оба устройства
обязательно должны работать в одном частотном диапазоне и поддерживать одинаковый протокол общения на уровне
железа. Разрешенные сертифицированные частоты для использования в сфере БПЛА на территории РФ 2.4 ГГц и 5.8 ГГц.
Аппаратура управления (TX) —
это устройство, которое позволяет
пилоту удаленно управлять БПЛА.
Обратить внимание при выборе:
1. Бюджет и число каналов. Чем
больше каналов – тем более
универсальна аппаратура.
2. Рабочий протокол связи.
3. Железо
и
функционал.
Например наличие экрана,
какие установлены стики и
какого они качества.
4. Эргономика
—
вещь
достаточно личная, никто не
сможет сказать вам, какой
передатчик
будет
лучше
лежать именно в ваших руках.
5. Возможность
установки
внешнего радиомодуля
Приемник устанавливается на коптере, принимает
сигнал с пульта и передаёт его в полётный
контроллер. Для усиления сигнала используют
специальные антенны. Антенна принимает сигнал
и подаёт его на колебательный контур, в котором
работает приёмник.
Протоколы передачи данных используются устройствах,
использующих радиосвязь. Их можно разбить на две
основные группы:
✅ Протоколы, применяемые в приемниках (связь между
приемником сигнала и полетным контроллером)
✅ Протоколы в передатчиках (обмен данными между
передатчиком и приемником).
Некоторые протоколы в приемниках очень широко
распространены и используются большинством
производителей (PWM, PPM, PCM), другие же являются
закрытыми(ERLS, FrSky, TBS).
19.
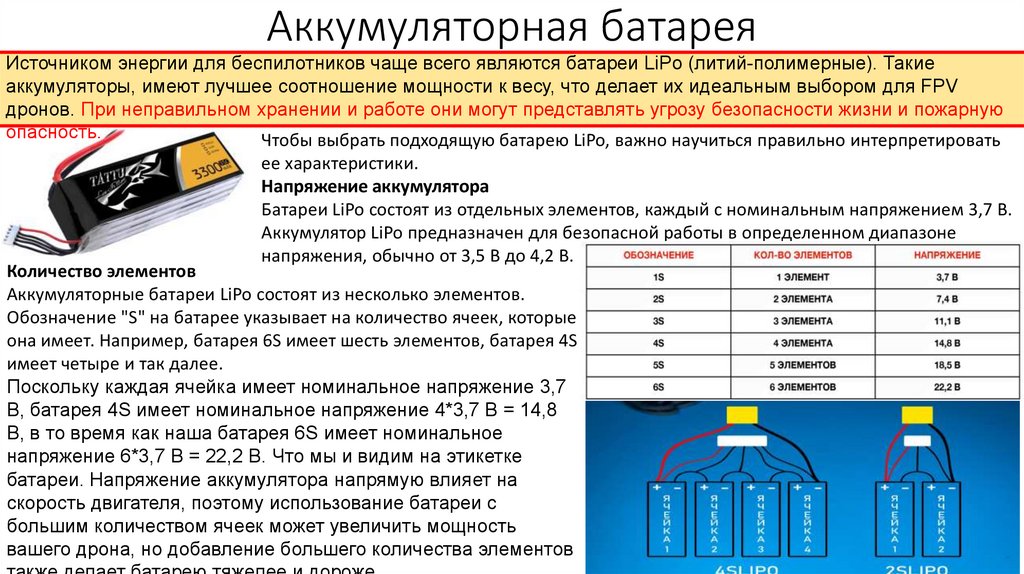
Аккумуляторная батареяИсточником энергии для беспилотников чаще всего являются батареи LiPo (литий-полимерные). Такие
аккумуляторы, имеют лучшее соотношение мощности к весу, что делает их идеальным выбором для FPV
дронов. При неправильном хранении и работе они могут представлять угрозу безопасности жизни и пожарную
опасность.
Чтобы выбрать подходящую батарею LiPo, важно научиться правильно интерпретировать
ее характеристики.
Напряжение аккумулятора
Батареи LiPo состоят из отдельных элементов, каждый с номинальным напряжением 3,7 В.
Аккумулятор LiPo предназначен для безопасной работы в определенном диапазоне
напряжения, обычно от 3,5 В до 4,2 В.
Количество элементов
Аккумуляторные батареи LiPo состоят из несколько элементов.
Обозначение "S" на батарее указывает на количество ячеек, которые
она имеет. Например, батарея 6S имеет шесть элементов, батарея 4S
имеет четыре и так далее.
Поскольку каждая ячейка имеет номинальное напряжение 3,7
В, батарея 4S имеет номинальное напряжение 4*3,7 В = 14,8
В, в то время как наша батарея 6S имеет номинальное
напряжение 6*3,7 В = 22,2 В. Что мы и видим на этикетке
батареи. Напряжение аккумулятора напрямую влияет на
скорость двигателя, поэтому использование батареи с
большим количеством ячеек может увеличить мощность
вашего дрона, но добавление большего количества элементов
20.
Аккумуляторная батареяЁмкость аккумулятора
Емкость LiPo аккумулятора измеряется в мАч (миллиампер-час). Этот параметр указывает на количество тока, которое вы
можете потреблять непрерывно в течение часа. Представим, что вбатарее - 1500 мАч (1,5 Ач). Нам потребуется один час
чтобы полностью разрядиться потребляя непрерывно ток равный 1,5 А. Ток в 3 ампера разрядит батарею за полчаса.
Аккумуляторы большой емкости могут обеспечить более высокие токи разряда.
Незабываем: 1000 мАч = 1Ач
Максимальный разрядный ток (Токоотдача)
Токоотдача С - это показатель максимального тока, который можно безопасно извлекать из LiPo аккумулятора,
не нанося никаких повреждений.Не рекомендуется использовать больший ток, чем указано в показателе C, так
как батарея может перегреться, увеличить внутреннее сопротивление, сократить срок службы или загореться.
Батареи с более высоким показателем C, как правило, тяжелее и больше даже при равной емкости.
Зная размеры моторов и пропеллеров которые мы установили, можем определить характеристики.
Например, квадрокоптер с установленными моторами и винтами имеет токоотдачу при 100% газа - 51.2 А на
мотор.
Общий максимальный ток для дрона с четырьмя двигателями составит 51,2 x 4 = 204,8 А при 100% газа.
Но, мы редко летаем на 100% газа более нескольких секунд, по этому снизим расчетный ток на 30% и получим
значение 143,36 А.
Теперь рассчитаем теоретический безопасный максимальный разрядный ток нашего аккумулятора с
показателем 150С по формуле: Макс.ток разряда = С * Ёмкость/1000 = 150*1,2=180А. Аккумуляторная батарея
21.
Несущая конструкцияИдеальная рама для квадрокоптера должна быть легкой и прочной, но, как обычно бывает у квадрокоптеров — это
требует жертв, например, в балансе. Конструкция и материал рамы определяют, насколько она устойчива к ударам.
Крепкие рамы обычно тяжелые, но более стабильны в воздухе, в то время как легкие наоборот быстрые и проворные.
Требования: Крепкая и устойчивая; Легкая и аэродинамичная; Эстетичный и продуманный дизайн.
Материал рамы квадрокоптера
Рама для квадрокоптера может быть сделана из любых материалов:
дерево, пластик 3D-принтера, литейный пластик, стекловолокно,
алюминий, и даже ПВХ-трубы. Но самым популярным и
рекомендуемым материалом считается карбон, он имеет
малый вес, требуемую прочность, необходимую жесткость.
Жесткость очень важна для стабильности и эффективности полета.
Но не все так идеально, у карбона тоже есть определенные
недостатки:
Карбон это электропроводящий материал. Если у вашей модели есть
оголенные провода, это может привести к короткому замыканию
через раму.
Карбон блокирует радиочастоты, например, 2,4 ГГц и 5,8 ГГц,
поэтому не прячьте антенны в корпусе, их нужно выводить наружу.