



")






")









































 physics
physicsSimilar presentations:










Системы автоматического регулирования (САР). Лекция 5
1.
Первое высшее техническое учебное заведение РоссииСанкт-Петербургский горный университет
императрицы Екатерины II
Основы автоматизации
технологических процессов
нефтегазового производства
Лекция 5
Системы автоматического регулирования (САР)
НИКИТИНА Л.Н., к.т.н., доцент кафедры АТПП
г. Санкт-Петербург
2024
1|61
2. Автоматика – «самодействие»
Автомат по продаже святой воды2|61
3. Автоматика – «самодействие»
Регулятор уровня водяных часов3|61
4. Автоматика – «самодействие»
Машина №37 для привлечения людей в храмыГерона Александрийского
4|61
5. Автоматоны
5|616. Термостат Дреббеля (нач. XVII в.)
1 - камера инкубатора,2 - спиртовка
3 - чувствительный элемент - сосуд
со спиртом 3,
4 - U-образная трубка, заполненная
ртутью
5 - поршень,
6 - рычаг клапана вентиляционного
отверстия.
Перегрев камеры приводит к
расширению спирта и открытию
вентиляции. Регулятор был снабжен
винтовым устройством выставки
температуры.
6|61
7. Регулятор Ползунова
Паровой котел ПолзуноваРегулятор Ползунова (1765 г.)
1 – паровой котел
2 – кладка
3 – топка
4 – водяная труба
5 – отводной патрубок
6 - поплавок
7|61
8. Регулятор Ползунова
8|619. Регулятор Уатта
Паровая машина с регулятором Уатта1 — паровой цилиндр; 2 — золотниковый распределитель; 3 —
заслонка подачи пара; 4 — центробежный чувствительный элемент
9|61
10. Регулятор Уатта
Регулятор частоты вращения (1788 г.)10|61
11. Регулятор Эри
Регулятор поворота телескопа1 - труба телескопа
2 - блок механических редукторов
3 - двигатель в виде барабана с грузом, снабженным
фрикционным регулятором с расходящимися шарами 4,
трущимися о поверхность неподвижной муфты 5 в случае, когда
скорость вращения телескопа
11|61превышает заданную.
12. Регулятор Дженкина
1 - заслонка2 - груз
3 - подвижная муфта фрикционного регулятора с
подпружиненными шарами 4
5 - вал
6 - катаракт
12|61
13. Сервопривод Фарко (1873 г.)
Регулятор непрямого действия без обратной связи1 - заслонка; 2 - серводвигатель; 3 - золотниковый
распределитель; 4 - центробежный регулятор с пружиной
13|61
14. Регуляторы
Паровая машина потребовала ряда автоматических устройств, такихкак клапан давления, регулятор уровня, золотниковый
парораспределитель и регулятор скорости вращения, что поставило
перед изобретателями первые серьезные задачи автоматического
управления.
Наибольшее распространение получили центробежные регуляторы
скорости прямого действия, в которых чувствительный элемент
обладал непосредственным воздействием на заслонку (регулятор
Уатта) либо создавал переменный нагрузочный момент трения
(регулятор Эри)
В регуляторах непрямого действия, первый из которых был создан
Фарко, чувствительный элемент управлял дополнительным
сервомотором заслонки, что не только повышало мощность регулятора,
но и обеспечивало астатизм регулирования скорости.
14|61
15. Регуляторы, классификация
Регулятор - устройство, которое следит за состоянием объектауправления как системы и вырабатывает для неё управляющие
сигналы
Регуляторы разделяют по нескольким признакам:
По общему принципу функционирования: адаптивные,
модальные, робастные регуляторы и т. д.
По линейности закона регулирования: линейные и нелинейные
регуляторы.
По виду потребляемой энергии
пневматические
электрические
гидравлические
По наличию статической ошибки
статические
астатические
15|61
16.
Регуляторы, классификацияПо осуществляемому закону регулирования (для линейных
регуляторов). Под законом регулирования понимается основная,
принципиальная аналитическая зависимость выходного воздействия
регулятора на объект регулирования от изменения входного сигнала,
получаемого регулятором от объекта регулирования. В соответствии
с этим различают:
пропорциональный (П-регулятор)
интегрирующий (И-регулятор)
дифференцирующий (Д-регулятор)
пропорционально-интегрирующий (ПИ-регулятор)
пропорционально-дифференцирующий (ПД-регулятор)
пропорционально-интегрально-дифференцирующий (ПИДрегулятор)
По принципу действия
прямого действия
непрямого действия
16|61
17. Статические регуляторы
Статическим или пропорциональным (П) называется такойрегулятор, величина перемещения регулирующего органа которого
пропорциональна отклонению регулируемого параметра.
Пропорциональная зависимость достигается за счет действия
жесткой обратной связи.
Статический регулятор частоты вращения прямого действия
17|61
18. Статические регуляторы
Статический регулятор частоты вращения непрямого действия(с жесткой обратной связью)
18|61
19. Астатические регуляторы
Автоматические регуляторы, у которых при отклонениирегулируемой величины от заданного значения регулирующий
орган перемещается со скоростью, пропорциональной этому
отклонению, называются астатическими.
Астатический регулятор частоты вращения непрямого действия
19|61
20. Астатические регуляторы
Астатический регулятор давления прямого действия20|61
21. Изодромный регулятор
Изодромный регулятор (ПИ-регулятор)Изодромом называют устройство, обеспечивающее гибкую обратную
связь (коэффициент обратной связи меняется во времени) в
автоматических регуляторах
21|61
22. Схема регулятора
22|6123.
Чувствительные элементы измеряют величину регулируемойкоординаты или возмущающего воздействия. Мощность их больше
мощности чувствительных органов измерительных приборов, так,
как обычно они приводят в действие последующий элемент
регулятора. Особенно это относится к чувствительным элементам
регуляторов прямого действия.
Задающие элементы изменяют настройку регулятора, задавая
значение регулируемой координаты.
Сравнивающие элементы служат для выявления разности двух
величин, из которых одна может задаваться механизмом настройки,
а другая определяется положением регулирующего органа.
23|61
24.
Преобразующие элементы предназначены для преобразованияодной физической величины в другую без сообщения
дополнительной энергии. Например в емкостном преобразователе
угол поворота пластины преобразуется в емкость между
пластинами. Преобразование происходит в чувствительном
элементе. Так, если выработанная им физическая величина
неудобна по каким-либо причинам для дальнейшего использования,
то в регулятор вводят преобразователь.
В усилительных устройствах сигнал сравнения, равный разности
измеренной и заданной величин, воздействует на управляющий
элемент усилителя, в результате чего происходит усиление сигнала,
передаваемого на его силовые элементы. В гидромеханических
регуляторах силовыми элементами обычно являются поршневые
гидравлические серводвигатели, в электрических регуляторах –
электродвигатели.
24|61
25.
Регулирующие органы перемещаются силовыми элементами иизменяют энергетическое состояние объекта регулирования так,
что величина регулируемой координаты приближается к заданному
значению.
Стабилизирующие устройства служат для гашения колебаний
регулируемой величины в процессе ее регулирования. В
гидромеханических регуляторах стабилизирующие устройства
часто выполняются в виде жестких и изодромных обратных связей.
Жидкостные успокоители (демпферы) способствуют гашению
колебаний тех звеньев, которые обладают значительной массой.
Обратные связи между регулирующим органом или силовым
элементом усилителя и его управляющим элементом приводят к
«предварительному отключению» гидро- или электродвигателя, что
способствует затуханию колебаний регулируемой величины.
25|61
26.
Регулирование может вестись или только по величине координаты(параметру рабочего процесса двигателя), или по величине
координаты и ее производной по времени. При этом в регуляторе
должен быть второй чувствительный элемент, который измеряет
скорость изменения координаты.
Отдельные элементы регулятора, например, чувствительный
элемент, задающее и сравнивающее устройства, конструктивно
могут быть объединены в одном узле. В регуляторах некоторых
типов отсутствуют усилители или стабилизирующие элементы.
26|61
27. Регулирование или управление
Управление – это процесс выработки управляющих воздействий попереводу объекта управления в желаемое состояние
Регулирование – это поддержание постоянным значения некоторой
заданной величины, характеризующей процесс, или изменение его по
заданному закону, осуществляемое с помощью изменения состояния
объекта или действующих на него возмущений и воздействия на
регулирующий орган объекта.
27|61
28. Классификация САУ
САУ – системы автоматического управления1.
по характеру изменения задающего воздействия (по алгоритму
функционирования).
а) системы стабилизации
б) системы программного управления
в) следящие системы
28|61
29. Классификация САУ
2.по принципу управления
по отклонению
по возмущению
комбинированные
29|61
30. Принципы управления
30|6131. Управление по отклонению
На выходе устанавливается датчик, который передает поцепи обратной связи значение управляемой величины y(t)
на орган сравнения (ОС) или сумматор, где оно
сравнивается с задающей величиной yзад(t), и на вход
управляющего устройства поступает разность двух
сигналов =Δ(t)= yзад(t) - y(t).
Управляющий сигнал u(t) формируется под воздействием
изменений самой управляемой величины.
31|61
32. Классификация САУ
по числу контуров управленияодноконтурные
многоконтурные – комбинированные и каскадные
3.
32|61
33. Классификация САУ
Комбинированные САУСистема содержит вспомогательное регулирующее устройство –
динамический компенсатор, который формирует корректирующий
импульс по наиболее сильному возмущению
33|61
34. Классификация САУ
Каскадные САУиспользуются для ОУ обладающих большой инерционностью по каналу
регулирования.
В этом случае САУ включает два регулятора:
• основной (внешний) – служит для стабилизации основной выходной
переменной у.
• вспомогательный (внутренний) – служит для регулирования
вспомогательной (промежуточной) переменной.
34|61
35. Классификация САУ
по числу управляемых переменныходномерные
многомерные
1) несвязное регулирование
2) связанное регулирование
4.
35|61
36. Классификация САУ
5.по виду и зависимости входных и выходных переменных
по свойствам в установившемся режиме (оценивается по
величине статической ошибки δ )
а) статические САУ – при yзад =const , δ ≠0 .
б) астатические САУ – при yзад =const , δ=0.
7.
по степени участия человека
ручного управления;
полуавтоматического управления;
автоматического управления
6.
36|61
37. Законы регулирования
Законом управления (регулирования) называютматематическую зависимость, в соответствии с которой
регулятор вырабатывает управляющее воздействие.
Основные законы управления –
пропорциональный
интегральный
дифференциальный
37|61
38. Законы регулирования
Пропорциональный закон управления (П-закон)где kp - коэффициент передачи (усиления), являющийся
параметром настройки регулятора, - ошибка
Регуляторы, осуществляющие этот закон, называются П –
регуляторами. К ним относятся регуляторы прямого
действия и с жесткой обратной связью.
Дает ненулевую статическую ошибку
38|61
39. Законы регулирования
Интегральный закон управления (И-закон)где Ти – постоянная времени интегрирования (время
изодрома), имеет размерность времени, - ошибка
Этот закон осуществляется в астатических регуляторах и
обеспечивает астатическое регулирование, так как процесс
регулирования заканчивается только тогда, когда отклонение
(ошибка регулирования) равна нулю
39|61
40. Законы регулирования
Дифференциальный закон управления (Д-закон)где Тд – постоянная времени дифференцирования (время
предварения), - ошибка
Д-закон реагирует на скорость изменения ошибки (на
тенденцию её изменения). Главный недостаток
дифференциального канала - большое влияние
высокочастотных помех, например, шумов измерений
40|61
41. Законы регулирования
Пропорционально-интегральный закон управленияИзодромный регулятор применяют при быстро и резко
меняющихся нагрузках
41|61
42. Законы регулирования
Пропорционально-интегрально-дифференциальный законуправления (ПИД)
ПИД-регулятор сочетает в себе достоинства всех трех
типовых регуляторов
42|61
43.
Новый этап в развитии автоматического регулирования наступилс применением в регуляторах электронных элементов, в частности
вычислительных устройств, что существенно расширило возможность
усовершенствования алгоритмов регулирования введением воздействий
по высшим производным, интегралам и более сложным функциям.
Преимущества электронных регуляторов особенно проявились в
самонастраивающихся системах, первыми из которых были
экстремальные регуляторы: регулятор топки парового котла по
минимуму потерь в дымовой трубе (1926), электрический регулятор
КПД (1940), авиационные регуляторы (1944).
43|61
44. Динамические свойства ОУ
Емкость ОУ – характеризует его инерционность, т.е. степеньвлияния входной переменной на скорость изменения выходной
Емкость (инерционность) ОУ характеризуется постоянной времени T
Самовыравнивание ОУ – характеризует устойчивость ОУ, т.е.
способность самостоятельно приходить после нанесения возмущения в
новое установившееся состояние
Отсутствие самовыравнивания ухудшает возможности управления
объектом.
Запаздывание ОУ - свойство объекта изменять регулируемую величину не
сразу после возмущения, а через некоторый промежуток времени – время
запаздывания (сек).
Различают
1) Транспортное (передаточное или чистое).
2) Переходное (емкостное)
3) Полное
44|61
45. Оценка качества регулирования
Показатели качества систем управления различают прямые и косвенныеПрямые показатели качества:
а) время регулирования tр
Характеризует быстродействие системы: чем меньше tр, тем лучше
система реагирует на изменение задания и внешние возмущения.
45|61
46. Прямые показатели качества
б) перерегулирование σПеререгулирование не должно превышать 10-30%. Характеризует
колебательность системы.
46|61
47. Прямые показатели качества
в) статическая ошибка (точность) δ – величина отклоненияустановившегося значения регулируемой величины y(∞) от заданного
(называют остаточное отклонение) δ = yзад – y(∞) .
Характеризует точность системы: чем меньше δ, тем точнее система
устанавливает выходную переменную y на заданное значение
47|61
48. Прямые показатели качества
г) колебательность m – число колебаний регулируемой величины завремя переходного процесса.
д) степень затухания φ – отклонение разности двух соседних амплитуд
колебаний направленных в одну сторону к первой из них
при φ = 0 – возникают незатухающие колебания с постоянной
амплитудой, при φ = 1 – переходный процесс стремится к
апериодическому (т.е. без колебаний).
48|61
49. Косвенные показатели качества
Косвенные оценки качества переходного процесса подразделяютсяна 3 группы:
• интегральные;
• частотные;
• корневые.
49|61
50. Интегральные показатели качества
50|6151. Частотные показатели качества
показатель колебательности М, определяемый отношением величинымаксимальной АЧХ к величине АЧХ при нулевой частоте ω = 0.
Качество регулирования уменьшается при увеличении показателя
колебательности М, при этом растет колебательность системы,
величина перерегулирования и время регулирования. Допустимым
значением показателя колебательности считают 1,1 ≤ M ≤ 1,5.
резонансная частота ωр - частота, при которой АЧХ системы имеет
экстремум. Существуют системы, не имеющие резонансной частоты
или имеющие несколько резонансных частот.
51|61
52. Частотные показатели качества
полоса пропускания ω0 - зона допустимых отклонений, которая обычнопредставляет собой полосу не более 5% отклонения от
установившегося значения. Быстродействие системы может зависеть
от ширины полосы пропускания.
частота среза ωcр - частота, при которой АЧХ с увеличением частоты
уменьшается, переходя от величин, больших единицы, к величинам,
меньшим единицы, и остается в этих пределах далее, независимо от
увеличения частоты.
52|61
53. Корневые показатели качества
Корневые оценки определяются по расположению полюсов(корней характеристического уравнения) системы на комплексной плоскости.
53|61
54. Лабораторная работа №3
.54|61
55. Структурные схемы
Для наглядного представления сложной системы как совокупностиэлементов и связей между ними используются структурные схемы.
Структурной схемой называется схема САУ, изображенная в виде
соединения передаточных функций составляющих ее звеньев.
55|61
56. Структурные схемы
Структурная схема показывает строение автоматической системы, наличиевнешних воздействий и точки их приложения, пути распространения
воздействий и выходную величину.
Используются блоки суммирования и сравнения сигналов.
Суммироваться и сравниваться могут лишь сигналы одной и той же
физической природы.
Преобразование структурной схемы должно осуществляться на основании
правил.
56|61
57. Структурные схемы
.57|61
58. Структурные схемы
.58|61
59. Свертка структурной схемы
59|6160. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРЯМОГО ДЕЙСТВИЯ
РЕГУЛЯТОР ПОЛЗУНОВАРЕГУЛЯТОР УАТТА
ВОДА
ПАР
ОН
Паровая
турбина
Объект
нагрузки
Масса
Центробежный
механизм
ДАТЧИК УРОВНЯ
Регулирующий
орган
ПАР
Регулирующий
орган
ТОПКА
60|61
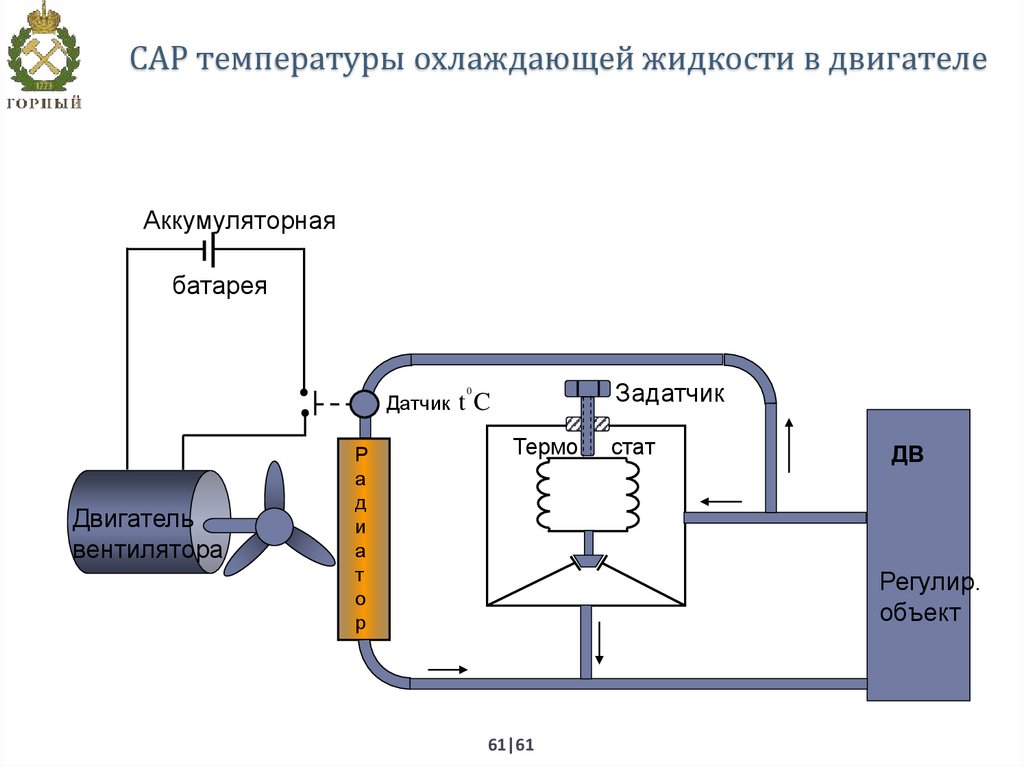
61.
САР температуры охлаждающей жидкости в двигателеАккумуляторная
батарея
Задатчик
0
Датчик t C
Двигатель
вентилятора
Р
а
д
и
а
т
о
р
Термо
стат
ДВ
Регулир.
объект
61|61