






 electronics
electronicsSimilar presentations:



")




")

Автономная мобильная платформа для научных исследований
1.
ПРОЕКТАВТОНОМНАЯ МОБИЛЬНАЯ ПЛАТФОРМА ДЛЯ
НАУЧНЫХ ИССЛЕДОВАНИЙ
Новосибирск 2016
2.
ЦЕЛИ И ЗАДАЧИ ПРОЕКТАЦель: Разработка прототипа компактной автономной мобильной
платформы для научных исследований
Задачи:
Изучение основ программирования современных микроконтроллеров
и одноплатных компьютеров
Изучение
способов
управления
моторами
постоянного
тока,
шаговыми моторами и сервоприводами, механизмов работы с
датчиками
Сборка прототипа мобильной платформы
Разработка платы управления
3.
НАЗНАЧЕНИЕ ПЛАТФОРМЫ И АКТУАЛЬНОСТЬИсследование алгоритмов движения робота в заранее неизвестном
окружении
Исследование методов навигации и построения плана местности
Исследование механизмов коммуникации и взаимодействия между
роботами
Исследование алгоритмов совместного координированного движения
группы роботов
Актуальность обусловлена отсутствием готовых отечественных
аналогов
и
высокой
ценой
ограниченных возможностях.
на
зарубежные
роботы
при
их
4.
АРХИТЕКТУРА СИСТЕМЫ УПРАВЛЕНИЯ АВТОНОМНОЙМОБИЛЬНОЙ ПЛАТФОРМЫ
Верхний уровень
Одноплатный компьютер Rasbperry Pi
3
Операционная система Linux
Коммуникация, алгоритмы движения
и взаимодействия, трансляция и
обработка видео
Нижний уровень
Микроконтроллер STM32F103C8T6
5.
ТЕМА 1РАЗРАБОТКА МОБИЛЬНОЙ ПЛАТФОРМЫ С
УПРАВЛЕНИЕМ ОТ МИКРОКОНТРОЛЛЕРА
6.
1 СРАВНЕНИЕ МИКРОКОНТРОЛЛЕРОВArduino UNO
ATMEGA328P
STM32F103C8T6
К1986ВЕ92QI
Страна
США
Швейцария
Россия
Процессор
8 бит AVR
32 бит ARM
32 бит ARM
Частота
до 20 МГц
до 72 МГц
до 80 МГц
Оперативная память
2 Кб
20 Кб
32 Кб
Постоянная память
32 Кб
64 Кб
128 Кб
7.
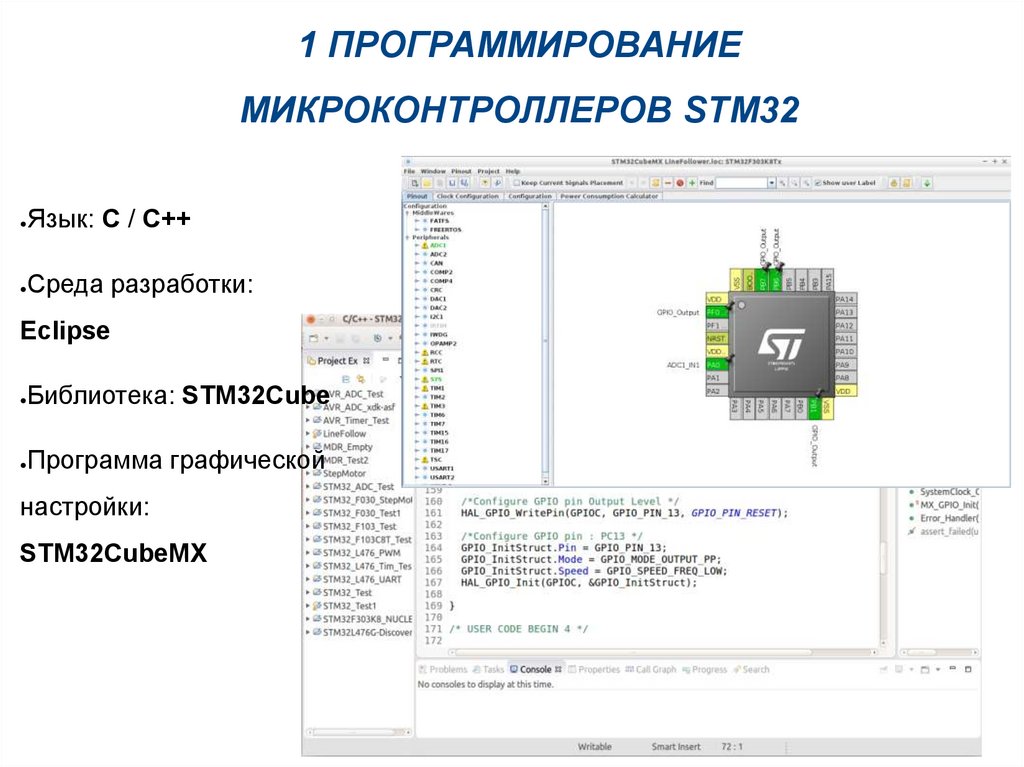
1 ПРОГРАММИРОВАНИЕМИКРОКОНТРОЛЛЕРОВ STM32
Язык: C / C++
Среда разработки:
Eclipse
Библиотека: STM32Cube
Программа графической
настройки:
STM32CubeMX
8.
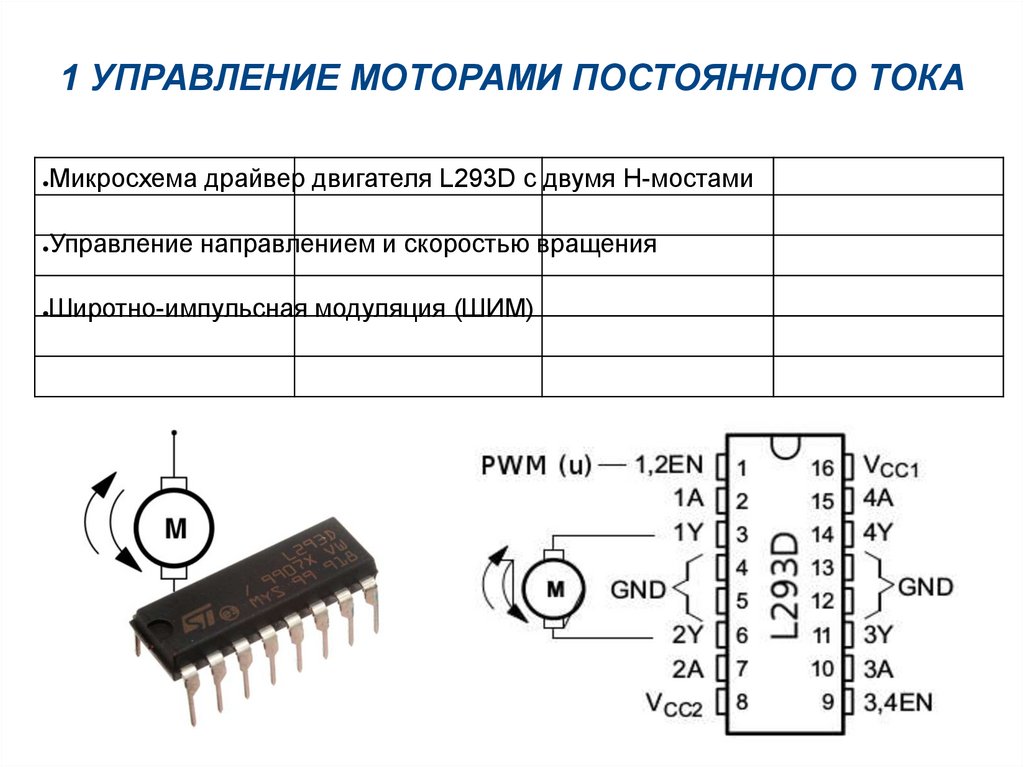
1 УПРАВЛЕНИЕ МОТОРАМИ ПОСТОЯННОГО ТОКАМикросхема драйвер двигателя L293D с двумя H-мостами
Управление направлением и скоростью вращения
Широтно-импульсная модуляция (ШИМ)
9.
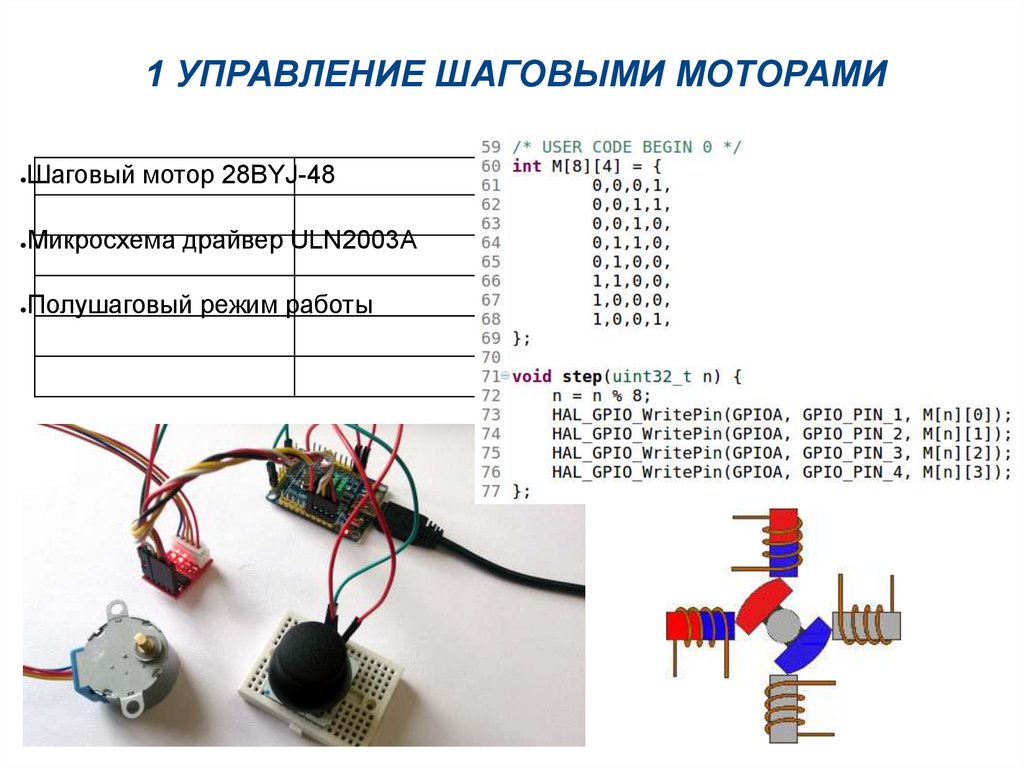
1 УПРАВЛЕНИЕ ШАГОВЫМИ МОТОРАМИШаговый мотор 28BYJ-48
Микросхема драйвер ULN2003A
Полушаговый режим работы
10.
1 РАБОТА С АНАЛОГОВЫМИ ДАТЧИКАМИИнфракрасный дальномер Sharp
Инфракрасный датчик линии и преграды на
элементе TCRT5000
АЦП в режиме одиночных измерений
11.
1 ОЖИДАЕМЫЕ РЕЗУЛЬТАТЫИзучение
основ
программирования
современных
микроконтроллеров.
Изучение
способов
управления
моторами
постоянного
тока,
шаговыми моторами и сервоприводами, механизмов работы с
аналоговыми датчиками.
Создание первого прототипа автономной платформы с управлением
от микроконтроллера
12.
ТЕМА 2РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ И
ВЗАИМОДЕЙСТВИЯ РОБОТОВ В СОСТАВЕ ГРУППЫ
13.
2 ПРОГРАММИРОВАНИЕ ОДНОПЛАТНОГОКОМПЬЮТЕРА RAPSPBERRY PI 3
Язык: Python
Операционная система: Linux
Получение данных и передача команд
микроконтроллерой системе
Алгоритмы управления движением
Алгоритмы взаимодействия между
роботами
Передача и обработка видео
14.
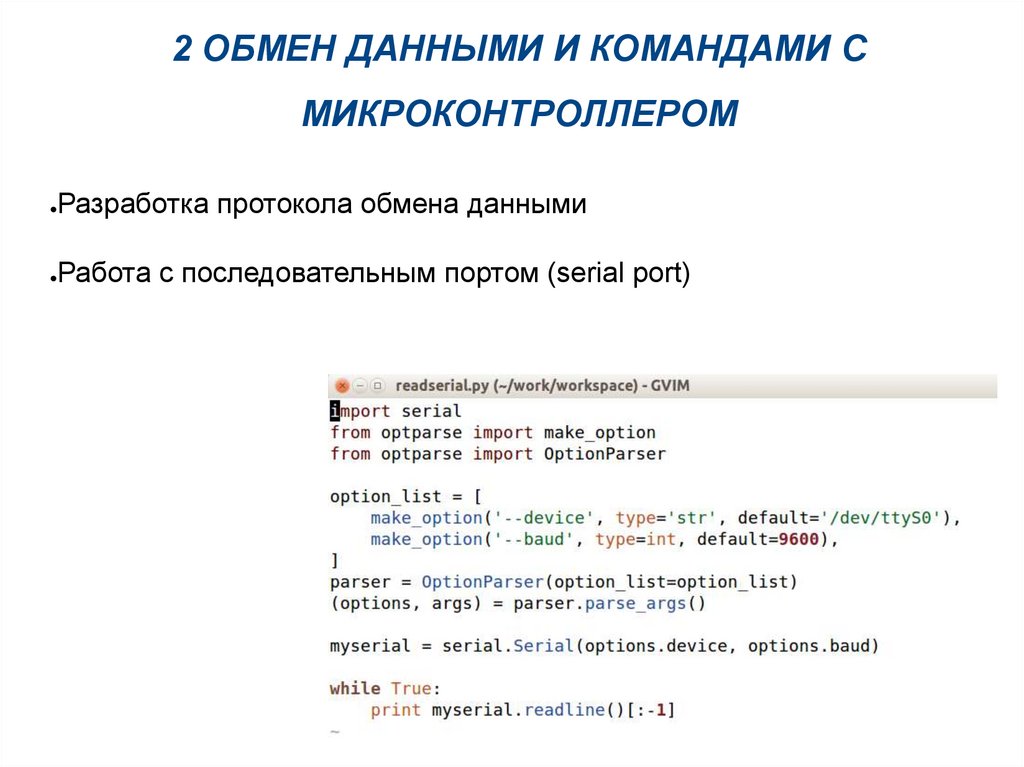
2 ОБМЕН ДАННЫМИ И КОМАНДАМИ СМИКРОКОНТРОЛЛЕРОМ
Разработка протокола обмена данными
Работа с последовательным портом (serial port)
15.
2 РАБОТА С ВИДЕОКАМЕРОЙТрансляция видео с бортовой камеры в сеть
Распознавание и отслеживание объектов
Rasbperry Pi Camera Board v2.1
Максимальное разрешение:
8 Мп (3280×2464)
Поддерживаемые видеоформаты:
1080p (30fps), 720p (60fps), 640×480p (
Размеры: 2592×1944
16.
2 СОВМЕСТНОЕ ДВИЖЕНИЕ ГРУППЫ РОБОТОВАлгоритмы совместного движения и взаимодействия на основе бортовых
датчиков
Алгоритмы автономного движения роботов в неизвестном окружении
Обследование и охрана помещений
17.
2 ОЖИДАЕМЫЕ РЕЗУЛЬТАТЫИзучение основ программирования на языке Python и работы в
операционной системе Linux
Реализация механизма обмена данными с микроконтроллером
Реализация системы трансляции видео с бортовых камер в сеть
Создание системы совместного движения роботов на остове данных
бортовых датчиков