


 electronics
electronicsSimilar presentations:
")


")






Классификация подсистем автоматического управления и проектирование на основе математических моделей (Часть 2)
1.
Тема 2. Классификацияподсистем автоматического
управления и
проектирование на основе
математических моделей
(Часть 2)
Дисциплина:
«АВТОМАТИКА В ЭЛЕКТРОННЫХ
СИСТЕМАХ БЕЗОПАСНОСТИ»
2.
Способы анализа САУ, законы управления иметоды синтеза
Цель любого управления является изменение
состояния объекта нужным образом. Теория
автоматического регулирования должна ответить на
вопрос: «как построить регулятор, который может
управлять данным объектом так, чтобы достичь цели?»
Модель – это объект, который мы используем для
изучения другого объекта (оригинала). Модель и
оригинал должны быть в чем-то похожи, чтобы выводы,
сделанные при изучении модели, можно было бы (с
некоторой вероятностью) перенести на оригинал.
3.
В целом можно выделить четыре основных требования:• точность – в установившемся режиме система должна
поддерживать заданное значение выхода системы,
причем ошибка (разница между заданным и
фактическим значением) не должна превышать
допустимую;
• устойчивость – система должна оставаться
устойчивой на всех режимах, не должна идти
«вразнос» (корабль не должен идти по кругу при
смене курса);
4.
• качество переходных процессов – при сменезаданного значения система должна переходить в
нужное состояние по возможности быстро и плавно;
• робастность – система должна сохранять
устойчивость и приемлемое качество даже в том
случае, если динамика объекта и свойства внешних
возмущений немного отличаются от тех, что
использовались при проектировании.
5.
Любой объект взаимодействует с внешней средой спомощью входов и выходов. Входы – это возможные
воздействия на объект, выходы – это те сигналы,
которые можно измерить. вала, температура.
Входы независимы, они «приходят» из внешней среды.
Существует некоторое правило, по которому элемент
преобразует вход «x» в выход « y». Это правило
называется оператором. Запись y = U[x] означает, что
выход y получен в результате применения оператора U
ко входу x.
Построить модель – это значит найти оператор,
связывающий входы и выходы. С его помощью можно
предсказать реакцию объекта на любой входной
сигнал.
6.
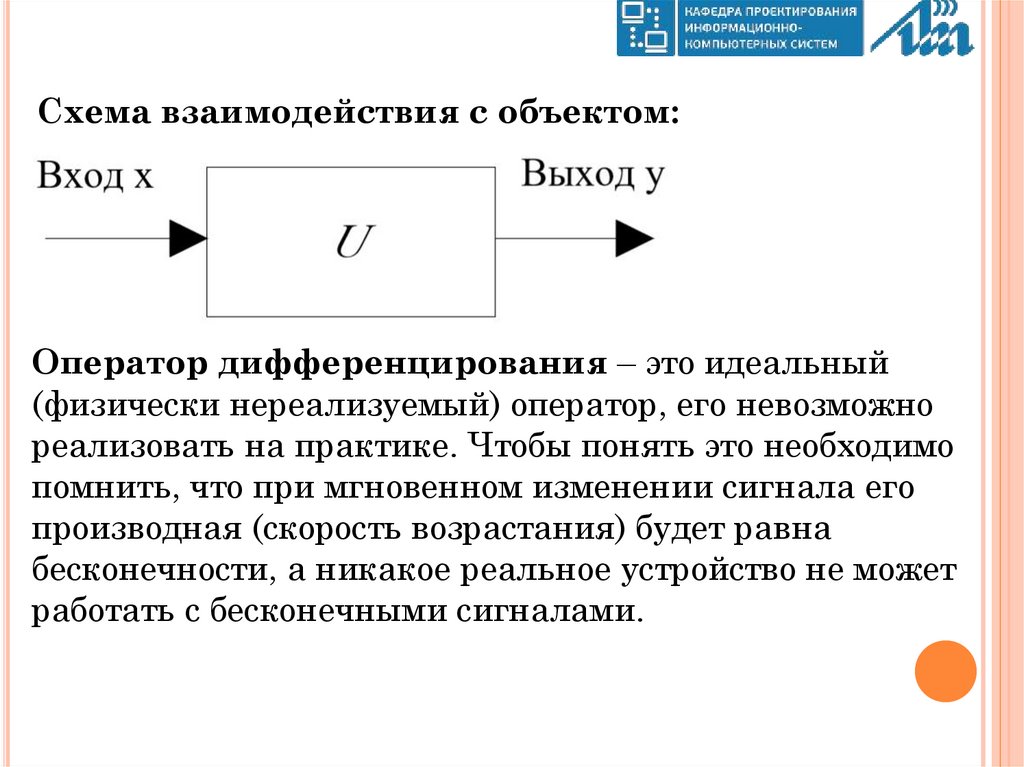
Схема взаимодействия с объектом:Оператор дифференцирования – это идеальный
(физически нереализуемый) оператор, его невозможно
реализовать на практике. Чтобы понять это необходимо
помнить, что при мгновенном изменении сигнала его
производная (скорость возрастания) будет равна
бесконечности, а никакое реальное устройство не может
работать с бесконечными сигналами.
7.
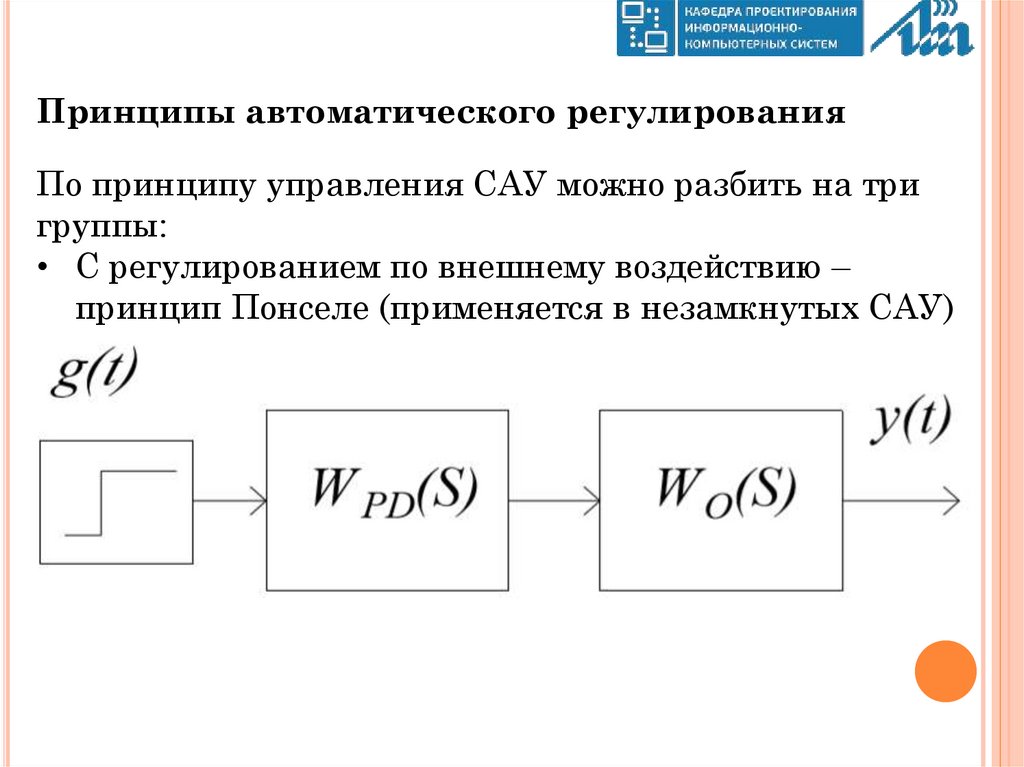
Принципы автоматического регулированияПо принципу управления САУ можно разбить на три
группы:
• С регулированием по внешнему воздействию –
принцип Понселе (применяется в незамкнутых САУ)
8.
В структуре обязательны датчики возмущения.Система описывается передаточной функцией
разомкнутой системы.
Достоинства:
можно добиться полной инвариантности к
определенным возмущениям;
не возникает проблема устойчивости системы, т.к. нет
ОС.
Недостатки:
большое количество возмущений требует
соответствующего количества компенсационных
каналов;
изменения параметров регулируемого объекта
приводят к появлению ошибок в управлении;
можно применять только к тем объектам, чьи
характеристики четко известны.
9.
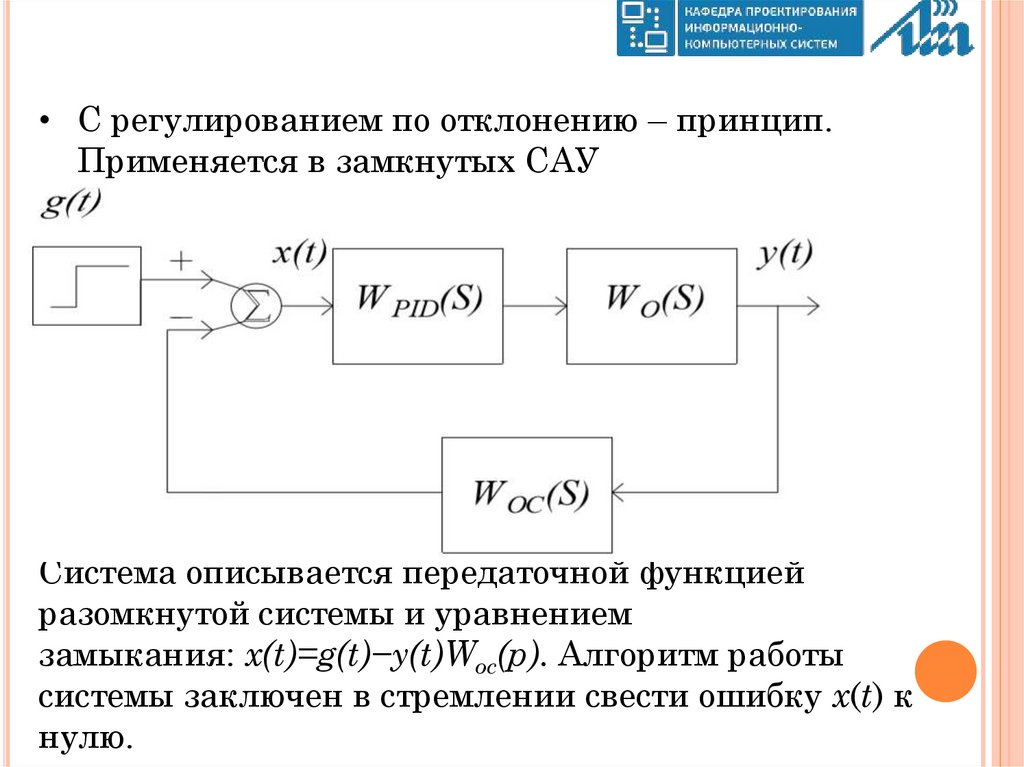
• С регулированием по отклонению – принцип.Применяется в замкнутых САУ
Система описывается передаточной функцией
разомкнутой системы и уравнением
замыкания: x(t)=g(t)−y(t)Wос(p). Алгоритм работы
системы заключен в стремлении свести ошибку x(t) к
нулю.
10.
Достоинства:ООС приводит к уменьшению ошибки не зависимо от
факторов, ее вызвавших (изменений параметров
регулируемого объекта или внешних условий).
Недостатки:
в системах с ОС возникает проблема устойчивости;
в системах принципиально невозможно добиться
абсолютной инвариантности к возмущениям.
Стремление добиться частичной инвариантности (не 1ыми ОС) приводит к усложнению системы и
ухудшению устойчивости.
11.
• С комбинированным регулированием. В этом случаеСАУ содержит замкнутый и разомкнутый контуры
регулирования.
12.
Достоинства:наличие ООС делает систему менее чувствительной к
изменению параметров регулируемого объекта;
добавление канала(ов), чувствительного к заданию или
к возмущению, не влияет на устойчивость контура ОС.
Недостатки:
каналы, чувствительные к заданию или к возмущению,
обычно содержат дифференцирующие звенья. Их
практическая реализация затруднена;
не все объекты допускают форсирование.
13.
Программы и законы регулированияПрограмма регулирования – план формирования
задающего воздействия g(t) на систему.
Программа регулирования может быть:
• временной: y=y(t);
• параметрической: y=y(s1,s2,s3,…,sn).
Закон регулирования – зависимость, по которой
формируется регулирующее воздействие u(t) на объект
из первичной информации: g(t) и(или) x(t) и,
возможно, f(t).
14.
Законы регулирования бывают:• линейные;
• нелинейные.
Классификация нелинейных законов регулирования:
• Функциональные.
• Логические.
• Параметрические.
• Оптимизирующие.
15.
Линейные непрерывные законы регулированияПод законом регулирования (управления) понимается
алгоритм или функциональная зависимость,
определяющая управляющее воздействие u(t):