



















, ПЕДАЛЕЙ И РУЛЕВЫХ ПОВЕРХНОСТЕЙ САМОЛЕТА")

 управления самолетом")









 industry
industrySimilar presentations:








 в авиации")

Лекция №1. История развития представлений об управлении. Тема 1. Летательный аппарат как объект управления. Тема 2
1. ЛЕКЦИЯ № 1 ТЕМА 1: ИСТОРИЯ РАЗВИТИЯ ПРЕДСТАВЛЕНИЙ ОБ УПРАВЛЕНИИ
Автоматическое устройство, автомат (греч. Automatos –самодействующий) – устройство, выполняющее все операции по
заданной программе без непосредственного участия человека.
1. Этапы становления автоматических устройств
Первые
АУ
Простейшие
АУ
Промышленные
АУ
Появление
науки
автоматика
IV этап
I этап
II этап
Оптимальные АУ
V этап
VI этап
Адаптивные АУ
III этап
Литература
Кулик А.С. Приложение теории линейных систем управления. – Харьков:
ХАИ, 1994.
Черепнев А.И. Истоки атоматизации.- М.:Наука,1975.
Кулик А.С., Гордин А.Г. и др. Словарь терминов по системам управления
летательных аппаратов. – Харьков: ХАИ, 2000. - 224 с.
2.
Известные ловушкипервобытных народов были
весьма разнообразны и
современным учёным не
всегда удаётся понять
принципы работы
остроумных ловушек, а
порой и сомневаться в своих
знаниях механики .
По конструктивным и механическим
принципам эти ловушки разделяют на
четыре основные группы:
-западня;
-ловушки, основанные на применении
силы тяжести;
-пружинные ловушки;
-крутильные ловушки.
Индейцы монтанье и наскапи на Лабрадоре, например, строят медвежьи
западни, которые обрушивают на животное четыре-пять тяжелых
древесных стволов, но для немедленного приведения западни в
действие достаточно лёгкого прикосновения медвежьего носа,
обнюхивающего приманку.
3.
Античный учёный Герон Александрийский в «Механике»описывает простые машины и их комбинации, использует понятие момента.
Описываются также и некоторые механизмы: системы зубчатых колёс, системы
блоков. Герон создал большое количество машин и механизмов, которые
сопровождались не меньшим количеством изобретений.
Фонтан Герона
Шар «эола»
Эолипил –шар «эола»- прообраз паровой
турбины, для вращения используется
реактивное действие струи пара. Паровой
двигатель - относят к наиболее известным
изобретениям Герона. Изобретение парового
двигателя, вызвавшего революцию в
транспорте и промышленности в XVIII в., на
самом деле было известно две тысячи лет
назад, если не в прямом виде, то уж точно
как понимание потенциала энергии пара.
Система управления в древнем Риме
Древнеримский акведук Пон-дю-Гар
4.
Дальнейшее развитие получает механика Леонардо да Винчи,он знал практически все разновидности зубчатых зацеплений,
кулачковые, гидравлические и винтовые механизмы, передачи с гибкими
звеньями …Он изобрёл несколько типов экскаваторов и придумал
организацию земляных работ одновременно на нескольких горизонтах,
изобрёл несколько гидравлических машин разных конструкций, прядильный
и волочильный станки, станок для насечки напильников, приспособления
для нарезки резьбы, прокатный стан, станок для свивки канатов, крутильный
станок и несколько веретен, машину для шлифовки оптических стёкол,
камерные шлюзы.
Некоторые из его изобретений настолько опередили своё время, что
остались недоступными для техники той эпохи. Например, центробежный
насос, гидравлический пресс, огнестрельное нарезное оружие. Он изобрёл
также летательный аппарат тяжелее воздуха и пришёл к выводу, что такой
аппарат летать без двигателя не может. В своих записных книжках и
рукописях (около 7 тыс. листов) Леонардо оставил наброски изобретений,
которые не могли быть поняты в его время, в частности, аэроплан,
подводная лодка.
5.
ВинтокрылСнаряд
со стабилизатором
Тележка с арбалетным приводом
Автоматическая система
зажигания с огнивом
Автоматическая система
зажигания с запалом
6.
Схема парового двигателя7.
Ткацкий станокПечатный станок Гутенберга
Печатный станок Кенинга
8.
ТЕМА 2: ЛЕТАТЕЛЬНЫЙ АППАРАТКАК ОБЪЕКТ УПРАВЛЕНИЯ
Летательный аппарат (ЛА) – устройство (аппарат), предназначенное для
полетов в атмосфере или космическом пространстве.
Объект управления (ОУ) - часть окружающего мира (среды),
выделенная таким образом, что выполняется три условия:
1) на объект можно воздействовать;
2) это воздействие позволяет изменить состояние в желаемом для
нас направлении;
3) изменение состояния объекта можно наблюдать.
Объект
автоматического
управления (ОАУ) - подсистема, для
Летательный
которой
выполняются следующие
аппарат
условия:
1) на ОАУ можно воздействовать
Рулевые
Датчики
при помощи сигнала управления;
поверхинформации
ности
2) сигнал управления позволяет
переводить ОАУ из одного состояния в
другое за конечное время;
Исполнительные
Бортовой цифровой
3) переход ОАУ из одного состояния
органы
вычислительный
в другое можно оценивать с помощью
комплекс
( приводы)
измерений.
9.
Аэродинамические схемы самолетов•нормальная аэродинамическая
схема;
•«утка»;
•«бесхвостка»;
•«летающее крыло»;
•тандемная схема.
10.
Аэродинамическиеорганы управления самолета
К аэродинамическим ОУ относятся:
• руль направления (РН);
• руль высоты (PB);
• элероны (Э);
• элевоны (ЭB);
• дифференциально отклоняющийся
стабилизатор (рули высоты) (ОС);
• триммеры (Т);
• роллероны (Р);
• интерцепторы (И);
• аэродинамические
щитки.
Р
11.
Авионика (от авиация и электроника) – совокупность всехэлектронных систем, разработанных для использования в авиации:
системы навигации,
системы стабилизации,
системы коммуникации,
системы отображения информации и
системы управления различными бортовыми устройствами – от
простейших до сложных.
Термин «авионика» появился в начале 70-х годов, когда произошло
появление интегральных микроэлектронных технологий и создание на их
основе компактных бортовых высокопроизводительных компьютеров, а
также принципиально новых автоматизированных систем контроля и
управления.
Первоначально основным потребителем авиационной электроники были
военные. Боевые самолеты превратились в летающие платформы для
датчиков и электронных комплексов.
На современных самолетах и вертолетах установлено большое
количество разнообразного оборудования и автоматических систем.
Авионика составляет большую часть затрат при производстве летательного
аппарата. Общая масса такого оборудования составляет около 30% от
общей массы летательного аппарата, а его стоимость – более 50%
стоимости, например, самолета.
12.
Лабораторный стенд на базе модели Т-1013.
Аппаратные средства комплекса14.
Кабина пилота современного самолета15.
Кабина пилота маневренного самолета16.
Кабина пилота и штурмана бомбардировщика17.
Система управления – система, состоящая из объектауправления, органов и средств, обеспечивающих в совокупности
желаемое поведение объекта управления.
f t
Э3 t
ИО
U t
y t
ОУ
Э2 t
e t
ВУ
z t
ŷ t
Д
Э1 t
ИО – исполнительный орган; ВУ – вычислительное устройство; Д – датчик;
z t - задающее воздействие;
e t - управляющее воздействие на ИО;
ŷ t
- результат измерений;
Э i t , i 1 ,3 - энергия, подводимая к элементам системы управления.
18.
Общая структура системы управленияa)
Замкнутая СУ
b)
Разомкнутая СУ
Регулятор
Регулятор
Объект
управления
Объект
управления
Возмущающие
воздействия
Возмущающие
воздействия
c)
Разомкнутая с элементами регулятора
Система
обработки
информации
Система
измерителей
Приводы
Объект
управления
Органы
управления
Возмущающие
воздействия
Основным ОАУ дисциплины будем считать систему управления полетом
(СУП)– важнейший функциональный комплекс ЛА.
19.
Система управления представляет собой совокупностьзамкнутых или разомкнутых структур, включающих в свой
состав объект управления и элементы регулятора:
-система измерителей,
- система обработки информации,
- исполнительные устройства,
- органы управления,
- объект управления.
20.
Управление летательным аппаратомРучка
управления
самолетом
Л
Проводка
управле
ния
Рулевой
привод
Рулевая
поверхность
Система управления полетом
Схема управления самолетом
Л
Ручка
управления
самолетом
Пульты и
орг. упр.
САУ
Механич.
часть СУ
Сервопривод
САУ
Структура системы управления самолета
Рулевой
привод
21. ОТКЛОНЕНИЯ РУКОЯТКИ (ШТУРВАЛА), ПЕДАЛЕЙ И РУЛЕВЫХ ПОВЕРХНОСТЕЙ САМОЛЕТА
22.
ОТКЛОНЕНИЯ ОСНОВНЫХРУЛЕВЫХ ПОВЕРХНОСТЕЙ САМОЛЕТА
Y
X
−
н
Z
в
−
е
−
23. Структура ручного (штурвального) управления самолетом
Виды управления ЛА:1) ручное (штурвальное);
2) автоматическое;
3) полуавтоматическое (директорное);
4) совмещенное.
Структура ручного (штурвального)
управления самолетом
Образ полета
Система отображения
информации;
закабинная информация
X P
Л
Система ручного
управления
Ручка
управления
самолетом
Действия
летчика
- оценка ситуации;
- вибор режима полета;
- формирование управляющего сигнала;
- отработка управляющего воздействия.
Рулевой
привод
Рулевая
поверхность
в
24. Структура автоматического и директорного управления самолетом
Внешниедатчики
информации
От летчика:
Бустер (РП)
заданные
значения
параметров;
переключение
режимов.
САУ
Внутренние
датчики
информации
АУ
САУ
U упр
Исполнит.
часть САУ
Вычислитель
САУ
U упр
ДУ
Команднопилотажные
индикаторы
дс
25.
Схема ручного управления самолетом26.
Неавтоматизированныеобратимая механическая (а) и необратимая гидромеханическая (б)
системы основного управления самолетом
27.
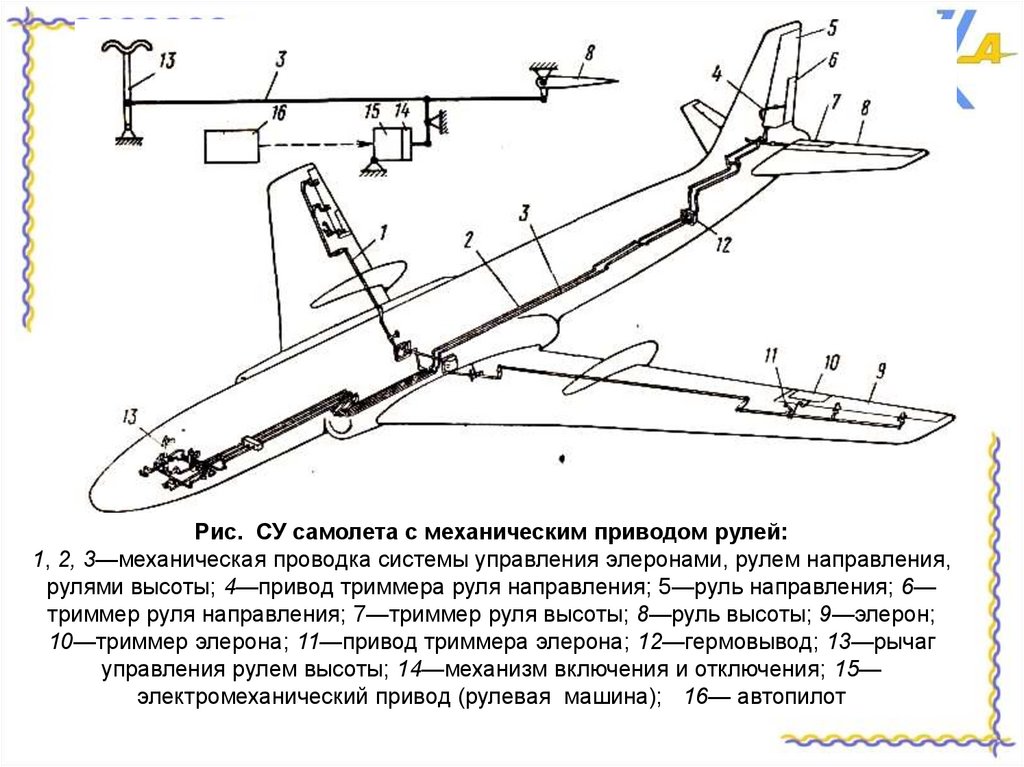
Рис. СУ самолета с механическим приводом рулей:1, 2, 3—механическая проводка системы управления элеронами, рулем направления,
рулями высоты; 4—привод триммера руля направления; 5—руль направления; 6—
триммер руля направления; 7—триммер руля высоты; 8—руль высоты; 9—элерон;
10—триммер элерона; 11—привод триммера элерона; 12—гермовывод; 13—рычаг
управления рулем высоты; 14—механизм включения и отключения; 15—
электромеханический привод (рулевая машина); 16— автопилот
28.
Рис. СУ самолета с гидромеханическим приводом руля направления:1—педали; 2—устройство отключения механизма загрузки педалей при выключении
гидромеханического привода; 3-механизм загрузки педалей; 4-механическая проводка; 5-устройство
переключения на аварийное управление; 6-гидромеханический привод; 7-руль направления;8аварийное (без усиления мощности) управление; 9-устройство включения исключения
электромеханического привода; 10-электромеханический привод;11-автопилот;12электромеханический привод стабилизатора; 13-руль высоты;14 — элероны; 15 — интерцепторы;
16 — гермовыводы
29.
Рис. СУ самолета с электрогидромеханическим приводом руля высоты30.
Рис. СУ самолета «Конкорд» с электрогидравлическим приводом рулей,резервированным гидромеханическим приводом.
31.
Агрегаты самолета СУ-271) РПД1Б-100:
2) РПД1Б-500: гидроцилиндр
четырехканальный рулевой рулевого привода ЭДСУ ГО
привод ЭДСУ ГО
3) ПМ15БА: многоканальная
рулевая машина РН
8) РМ-190: рулевая машина
носков
13)РМ-130Б: рулевая машина
управления флаперонами
4)МР60Б: распределительный
механизм привода РН
32.
33.
Комплект агрегатов вертолета МИ – 8(17)1. КАУ-30Б - комбинированный
рулевой привод управления по
тангажу, крену и высоте (шаг-газ)
2. РА-60Б - комбинированный агрегат
управления по курсу