











 physics
physicsSimilar presentations:

")






")

Кинематика
1.
Кафедра физикиФИЗИКА
КИНЕМАТИКА
Подготовила Тенчурина А.Р.
2. План лекции:
Основные моделиКинематические уравнения движения
Скорость
Ускорение
Графики
Вращательное движение
Угловые скорость и ускорение
Связь между линейными и угловыми
величинами
3.
Материальная точка − тело размерамикоторого можно пренебречь в условиях
данной задачи.
4.
Абсолютно твёрдое тело ни при какихусловиях не может деформироваться и при всех
условиях расстояние между двумя частицами
этого тела остаётся постоянным.
5.
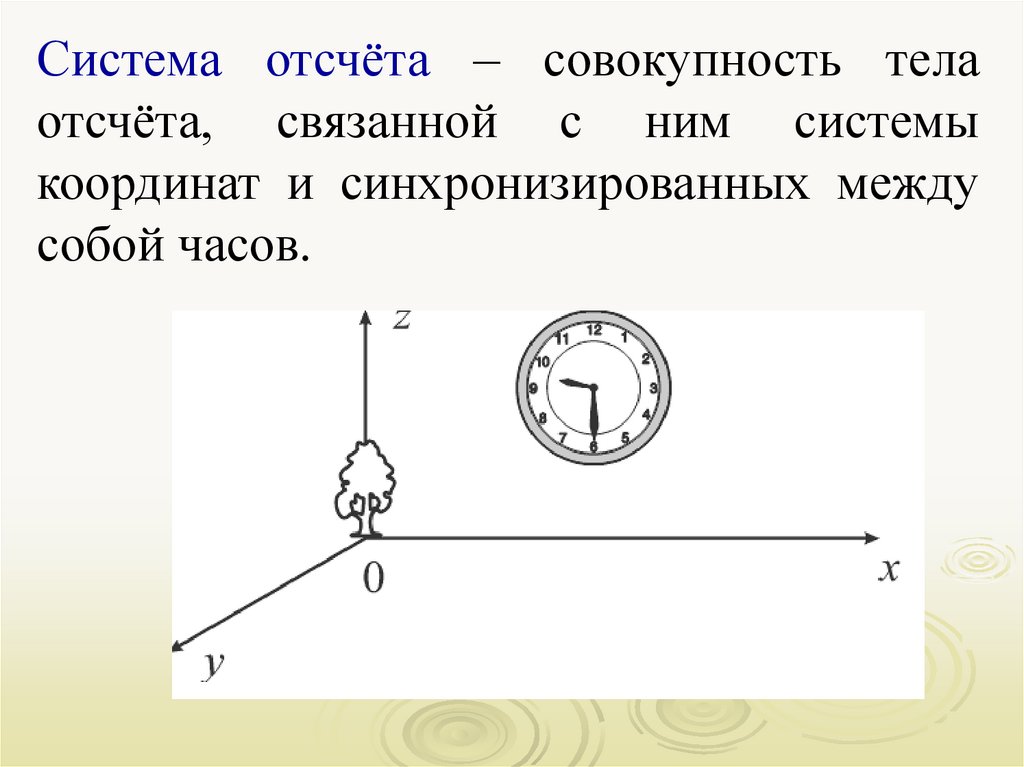
Система отсчёта – совокупность телаотсчёта, связанной с ним системы
координат и синхронизированных между
собой часов.
6.
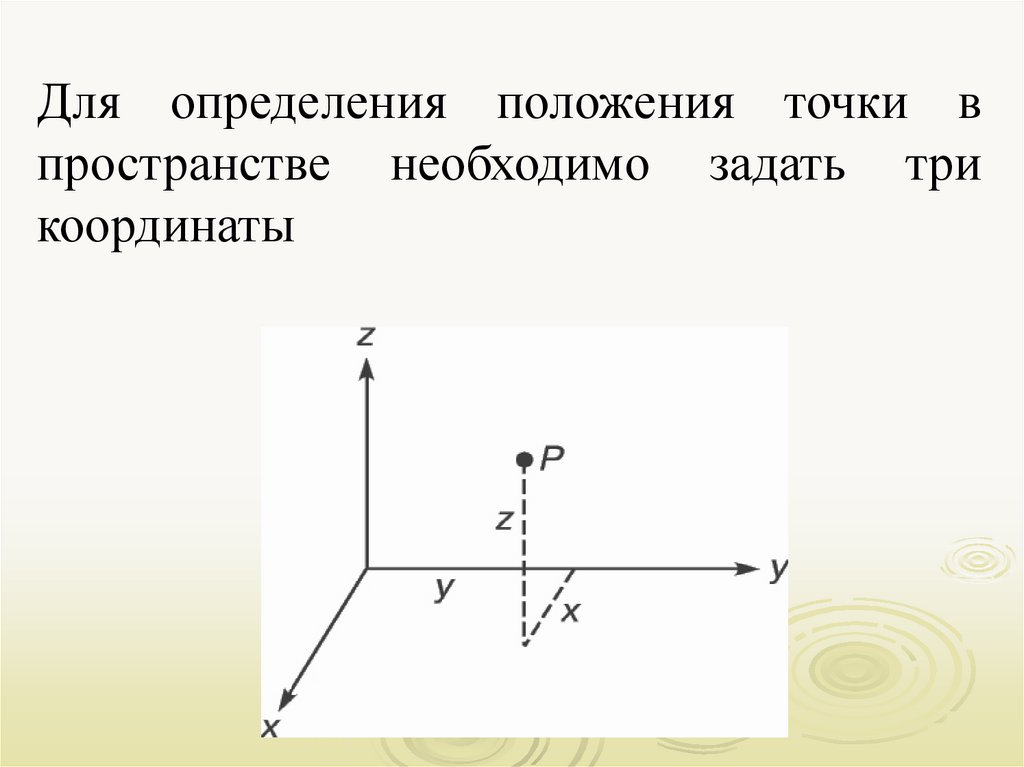
Для определения положения точки впространстве необходимо задать три
координаты
7. Радиус-вектор − проводится из начала координат точки О в точку где находится тело в данный момент времени.
r r (t )8.
Кинематические уравнения движенияx x(t )
y y (t )
z z (t )
r r (t )
Верхняя система уравнений записана в
скалярном виде, нижнее в векторном виде
9.
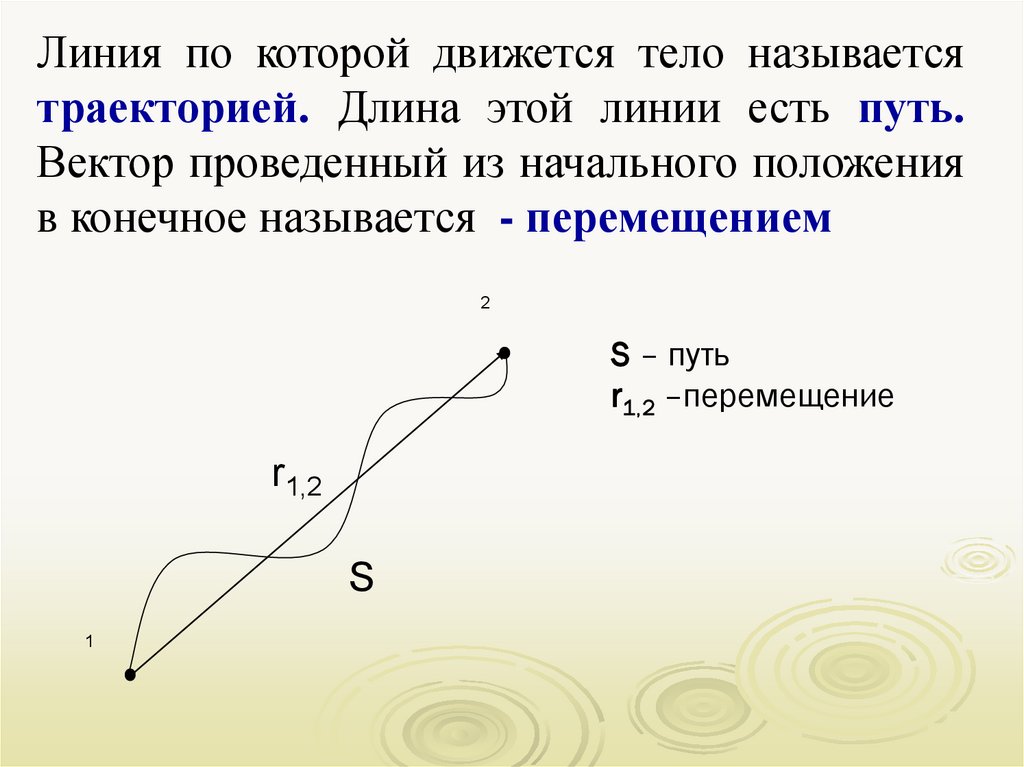
Линия по которой движется тело называетсятраекторией. Длина этой линии есть путь.
Вектор проведенный из начального положения
в конечное называется - перемещением
2
S – путь
r1,2 –перемещение
r1,2
S
1
10.
Припрямолинейном
движении
вектор
перемещения совпадает с траекторией и модуль
перемещения Δr равен пройденному пути ΔS
При поступательном движении любая прямая
жестко связанная с телом и проведённая через
две произвольные точки данного тела остается
параллельной самой себе
11.
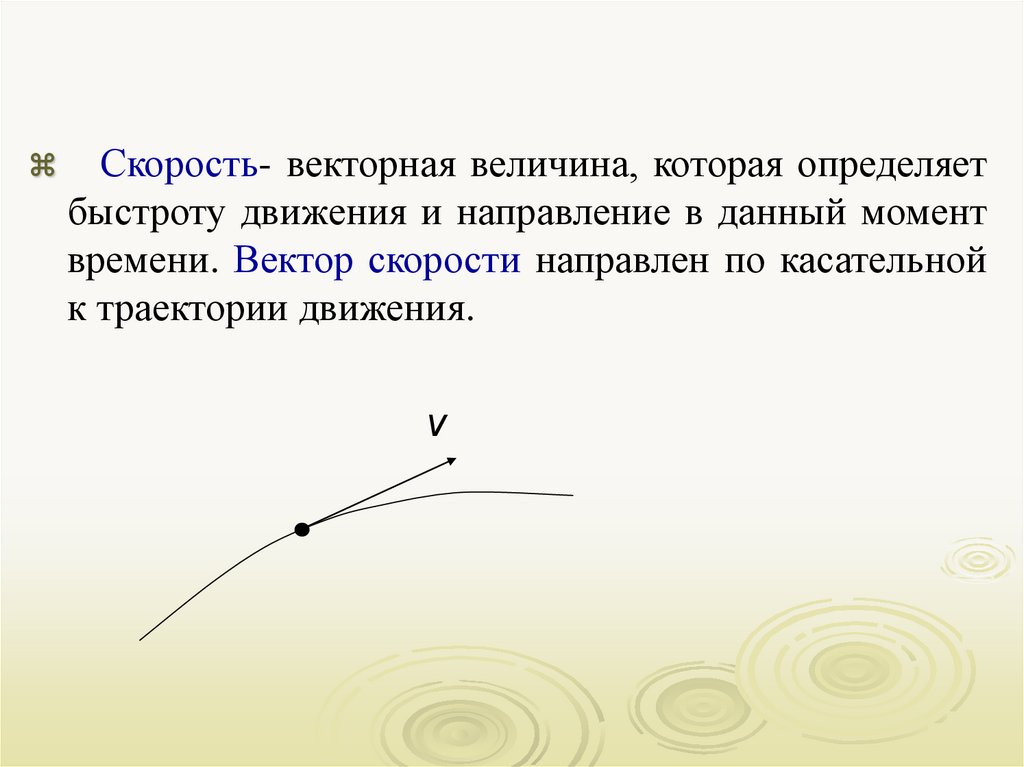
Скорость- векторная величина, которая определяетбыстроту движения и направление в данный момент
времени. Вектор скорости направлен по касательной
к траектории движения.
v
12.
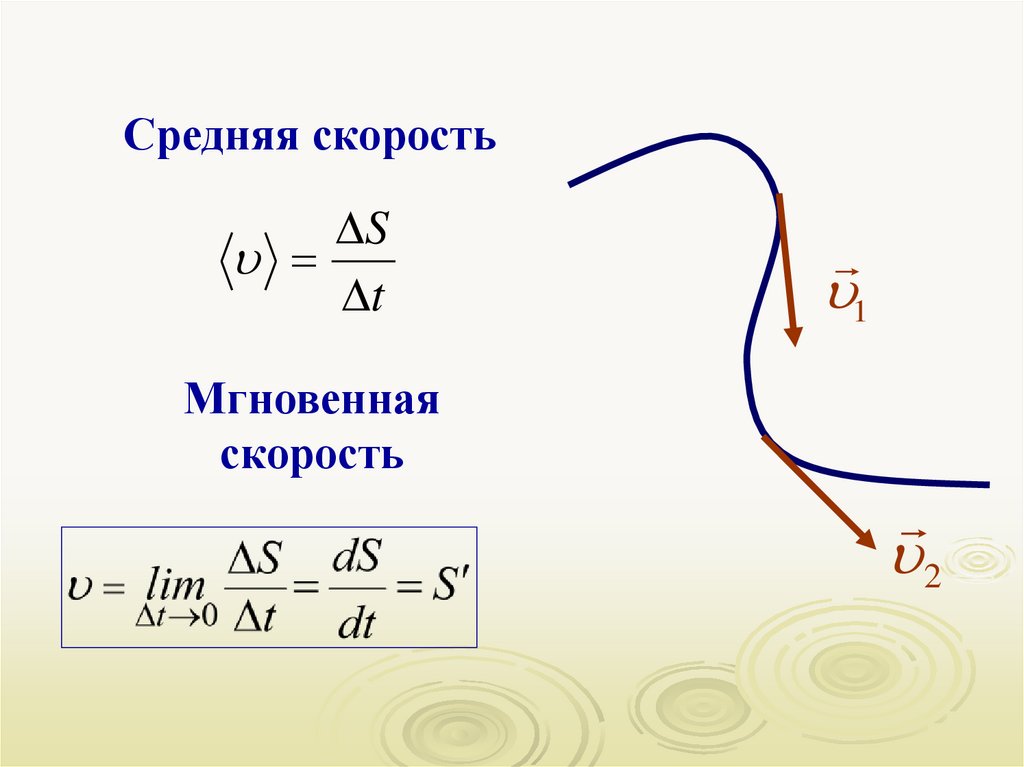
Средняя скоростьS
t
1
Мгновенная
скорость
2
13.
При прямолинейном равномерном движении телоза
равные промежутки времени проходит
одинаковый путь
14.
График скоростиconst
S
15.
График путиS
t
s
t
tg
16.
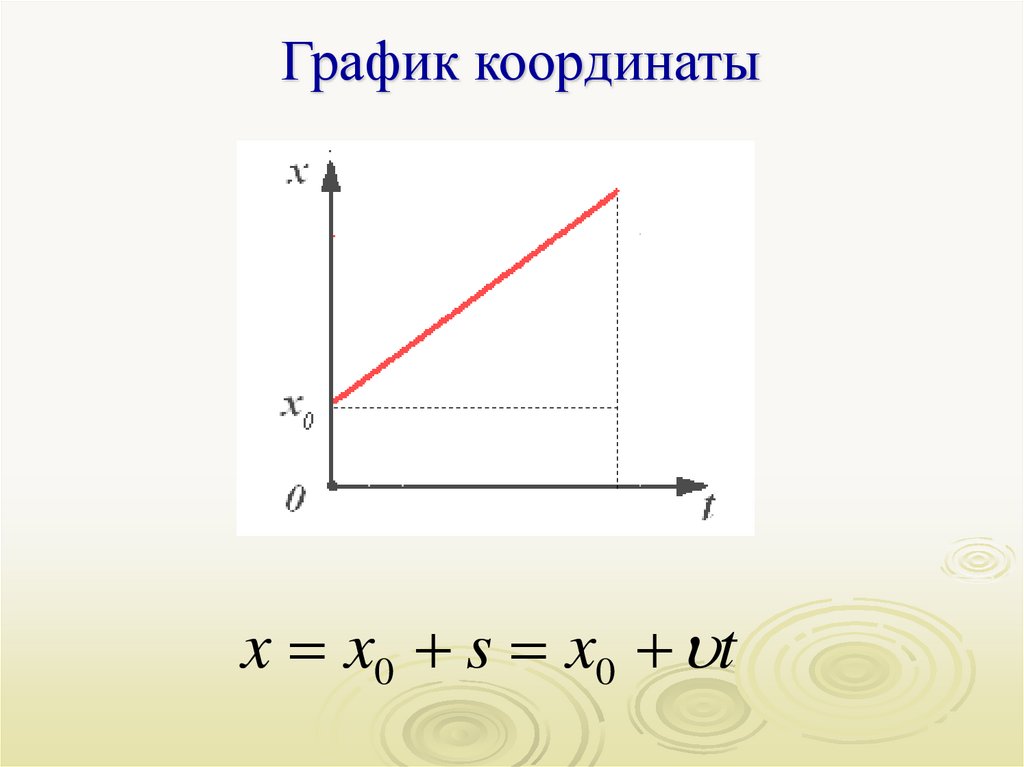
График координатыx x0 s x0 t
17.
Ускорение – характеристика неравномерного движения, определяющая быстротуизменения скорости Δυ за время Δt по
модулю и направлению
a
t
м
2
с
18.
Мгновенное ускорение − векторная величина,определяемая первой производной скорости
по времени или второй производной пути по
времени
d d S
а
2
dt
dt
2
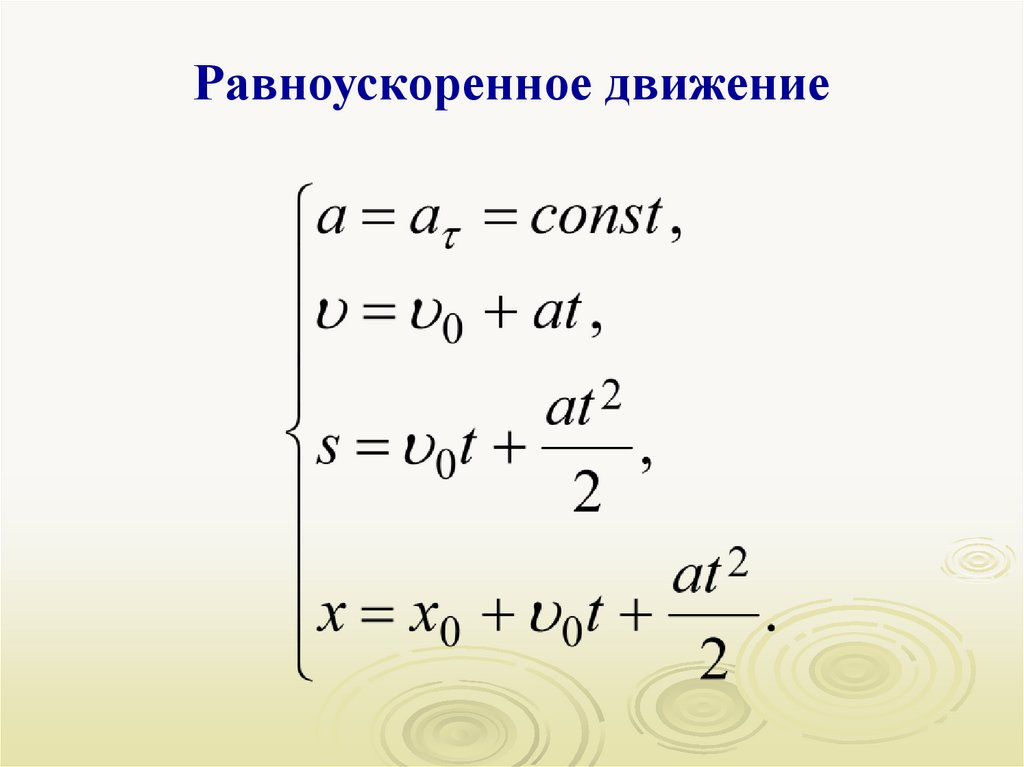
19.
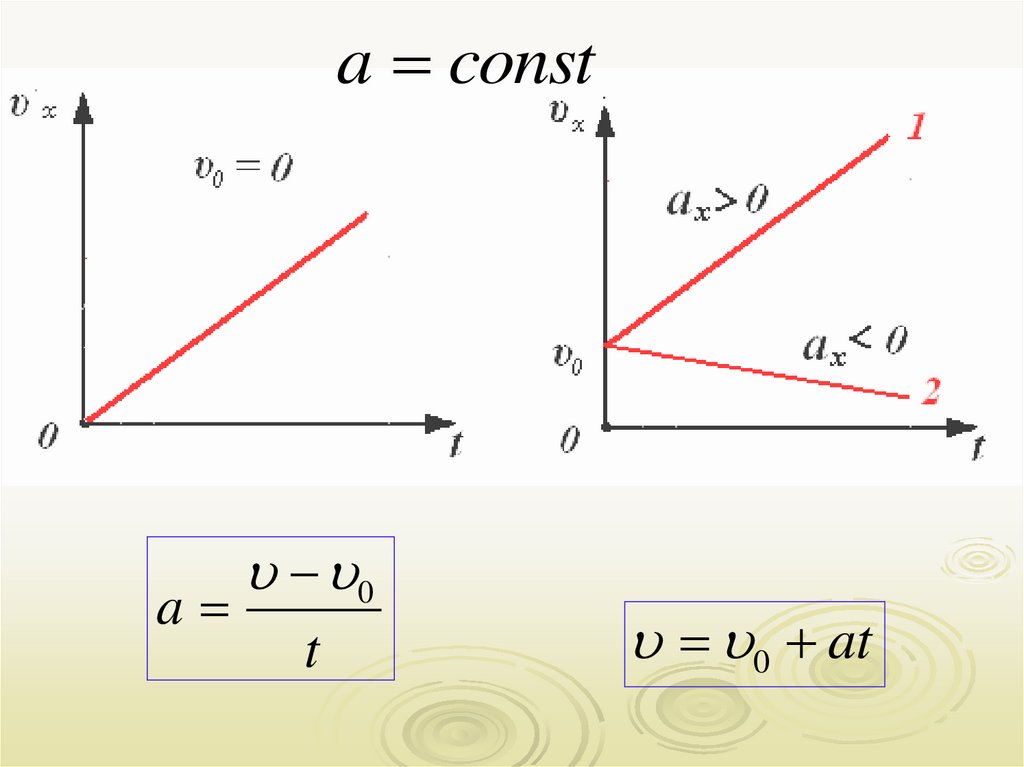
a consta
0
t
0 at
20.
21.
tt
t
t
0
0
0
0
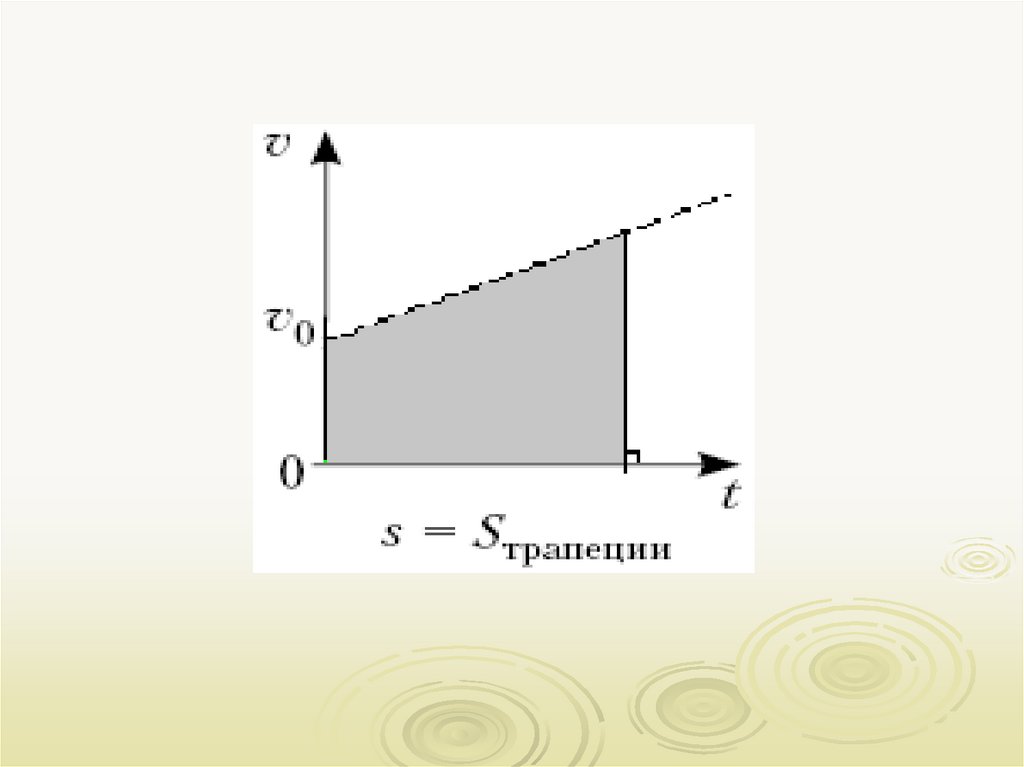
S dt 0 at dt 0 dt atdt
2
at
0t
2
2
at
S 0t
2
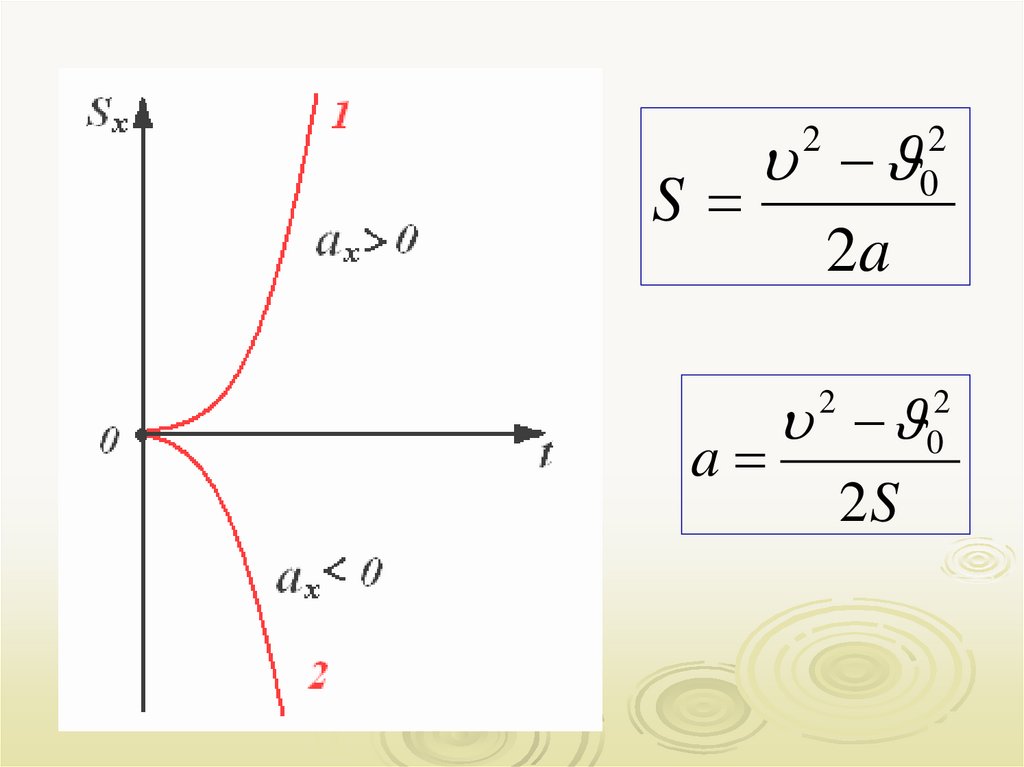
22.
Sa
2
2
0
2a
2
2S
2
0
23.
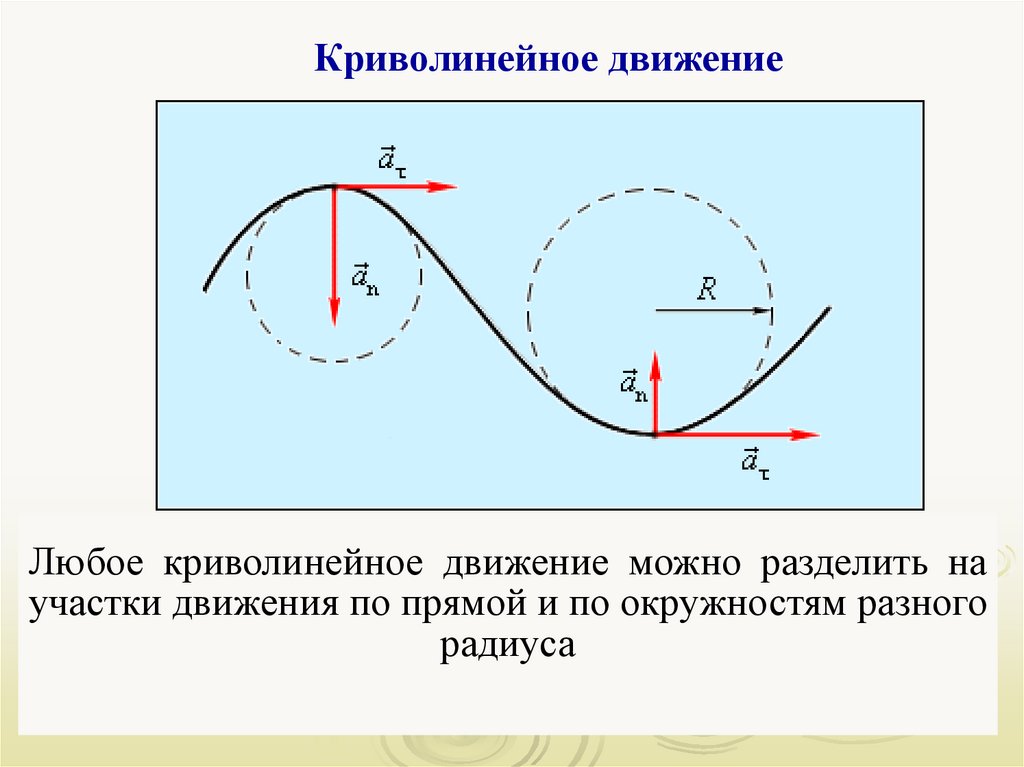
Криволинейное движениеЛюбое криволинейное движение можно разделить на
участки движения по прямой и по окружностям разного
радиуса
24.
2 125.
Полное ускорение26.
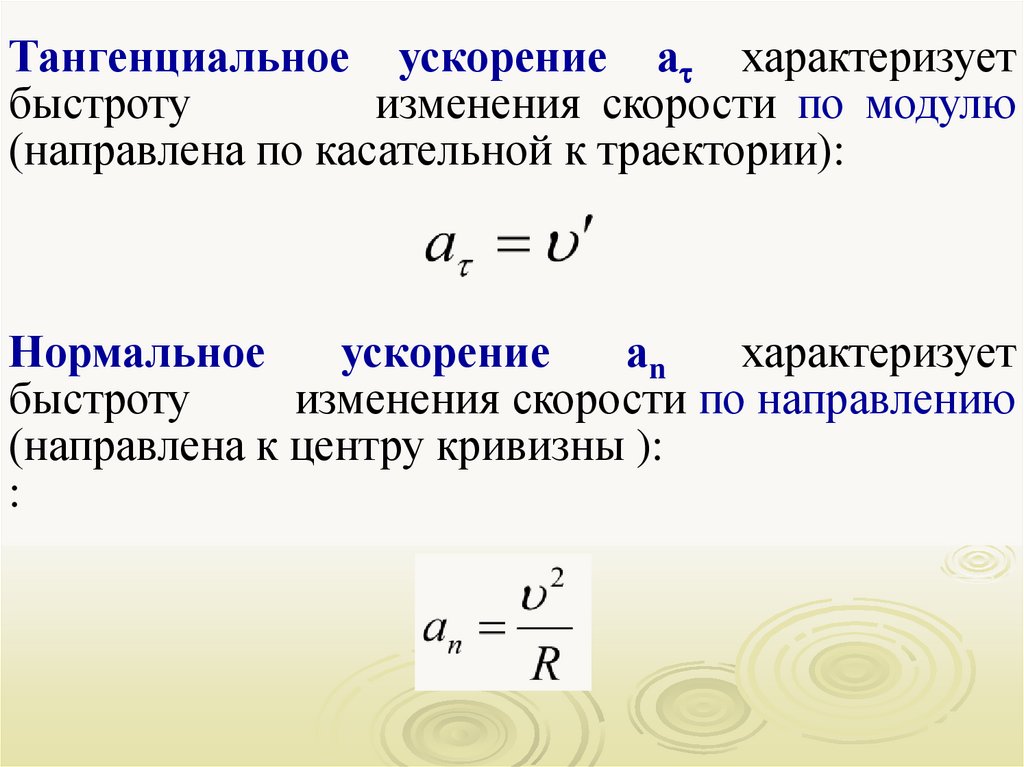
Тангенциальное ускорение а характеризуетбыстроту
изменения скорости по модулю
(направлена по касательной к траектории):
Нормальное
ускорение
аn
характеризует
быстроту
изменения скорости по направлению
(направлена к центру кривизны ):
:
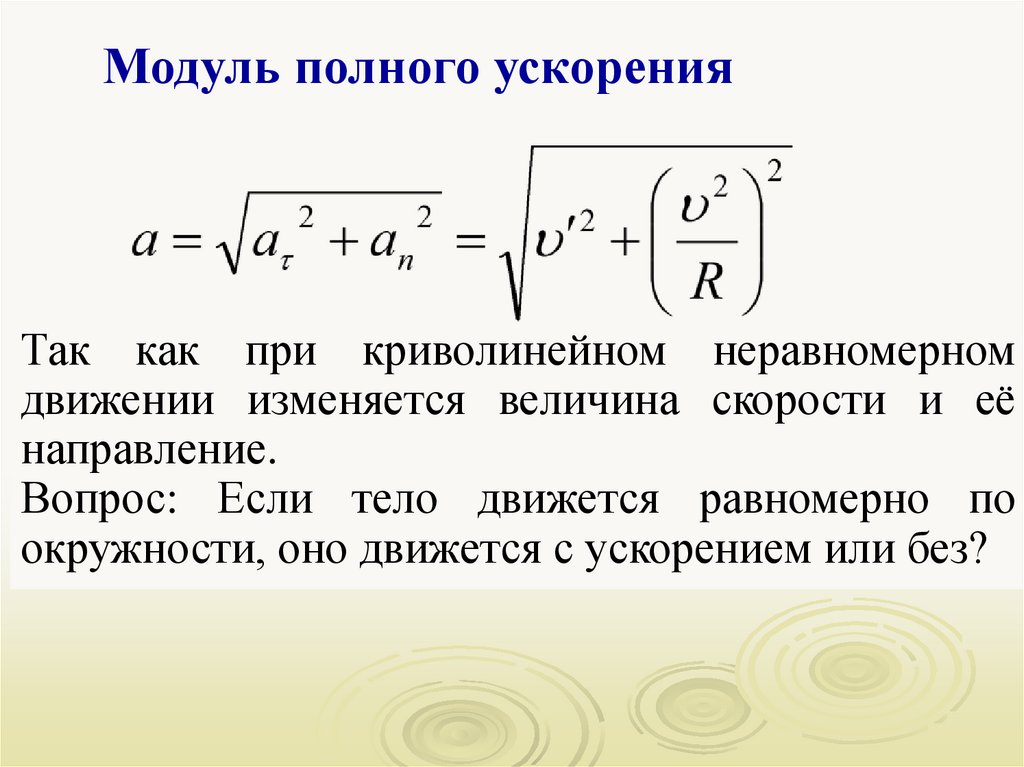
27.
Модуль полного ускоренияТак как при криволинейном неравномерном
движении изменяется величина скорости и её
направление.
Вопрос: Если тело движется равномерно по
окружности, оно движется с ускорением или без?
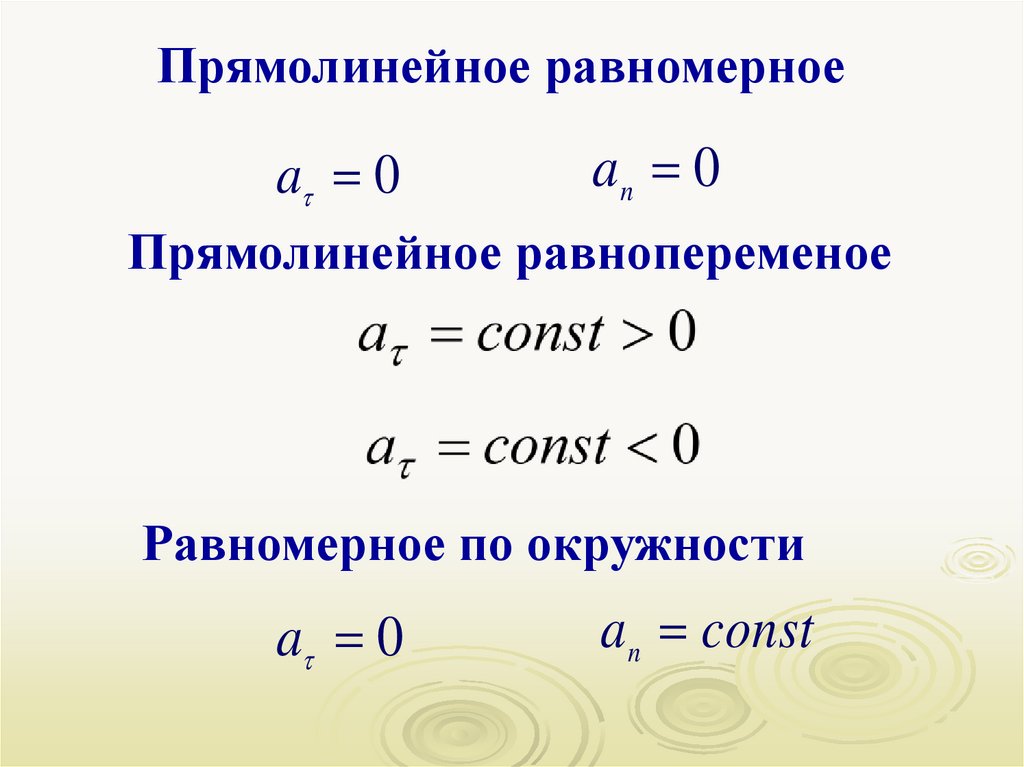
28.
Прямолинейное равномерноеa 0
an 0
Прямолинейное равнопеременое
Равномерное по окружности
a 0
a n const
29.
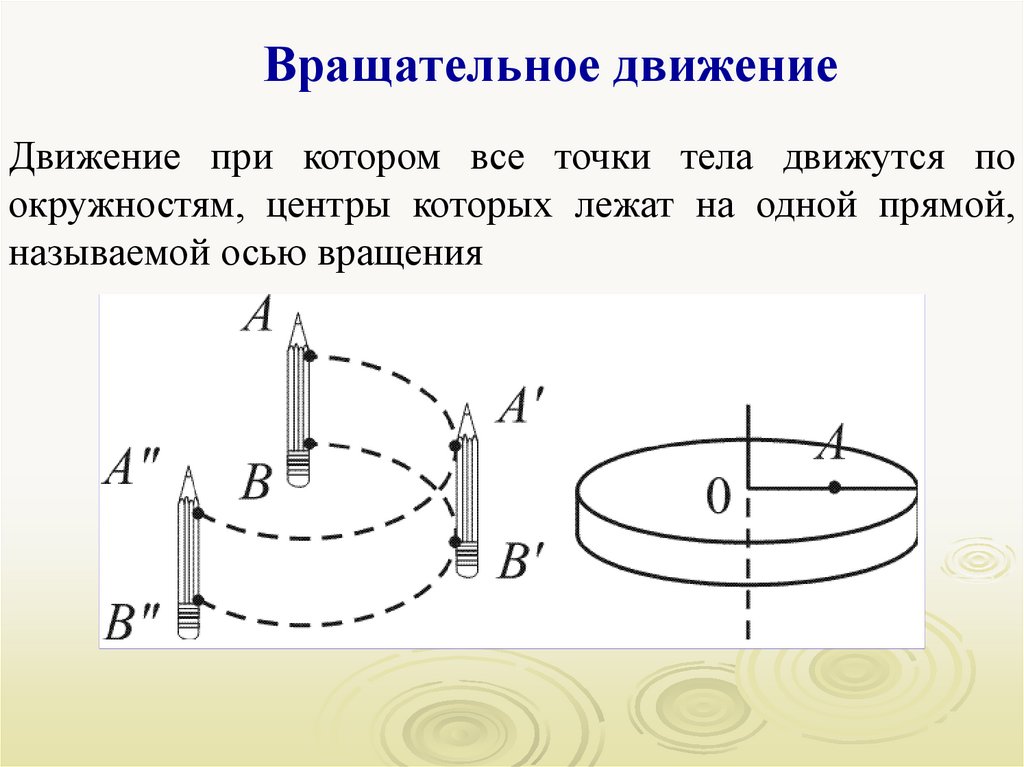
Равноускоренное движение30.
Вращательное движениеДвижение при котором все точки тела движутся по
окружностям, центры которых лежат на одной прямой,
называемой осью вращения
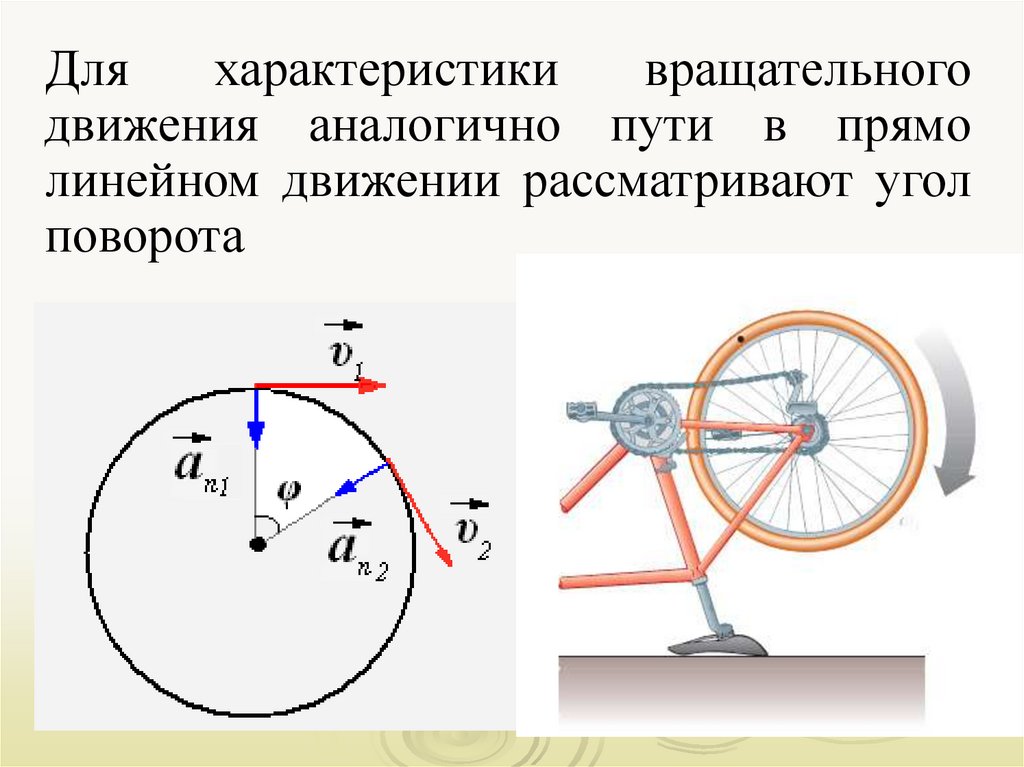
31.
Дляхарактеристики
вращательного
движения аналогично пути в прямо
линейном движении рассматривают угол
поворота
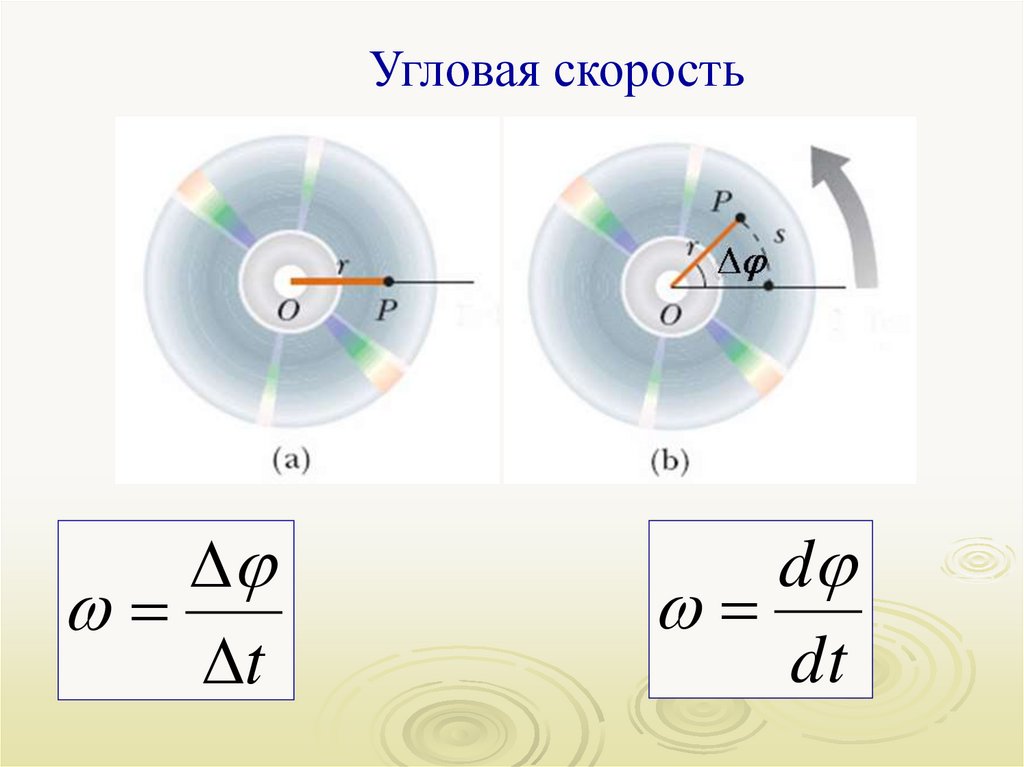
32.
Угловая скоростьt
d
dt
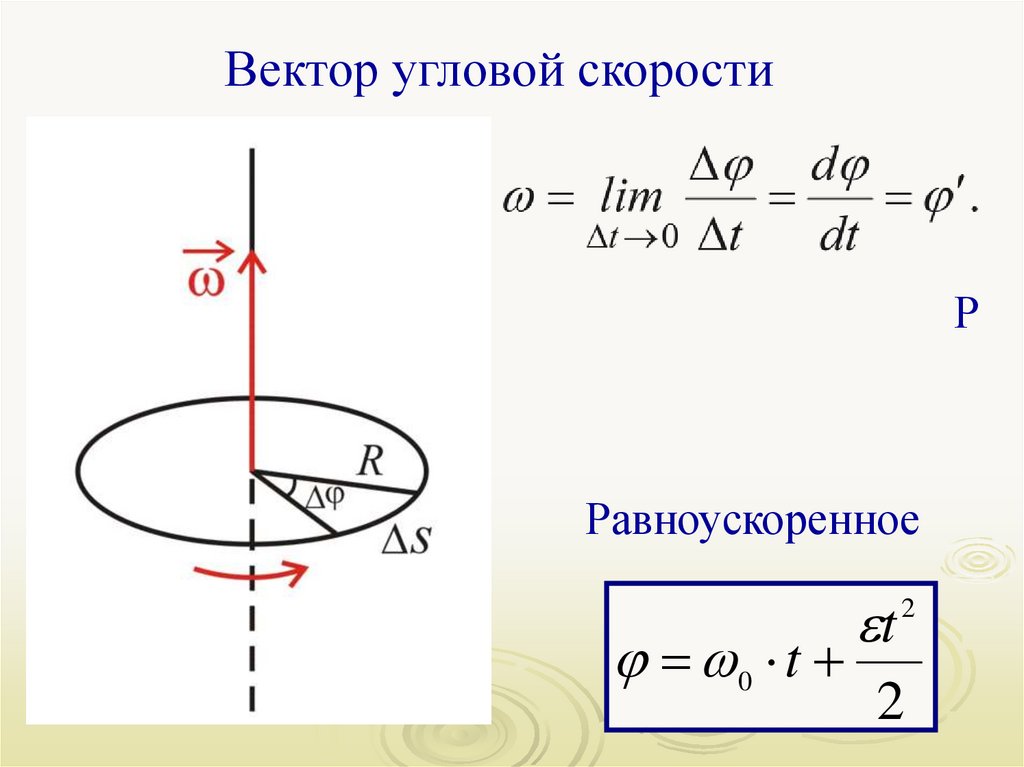
33.
Вектор угловой скоростиР
Равноускоренное
0 t
t
2
2
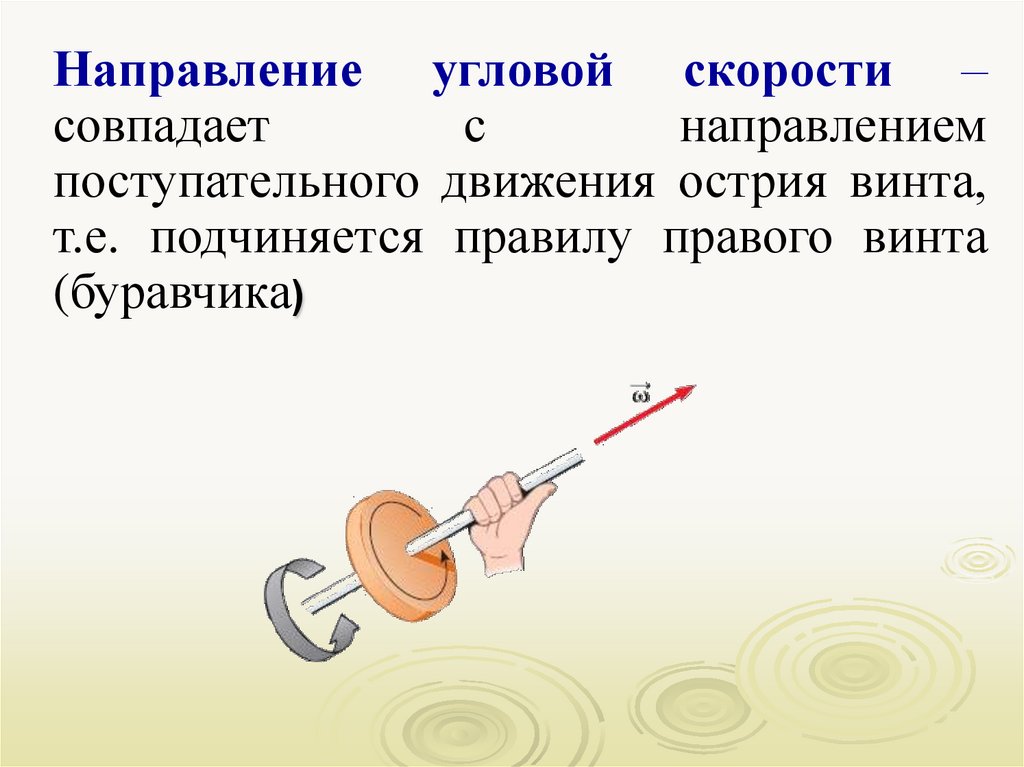
34.
Направление угловой скорости –совпадает
с
направлением
поступательного движения острия винта,
т.е. подчиняется правилу правого винта
(буравчика)
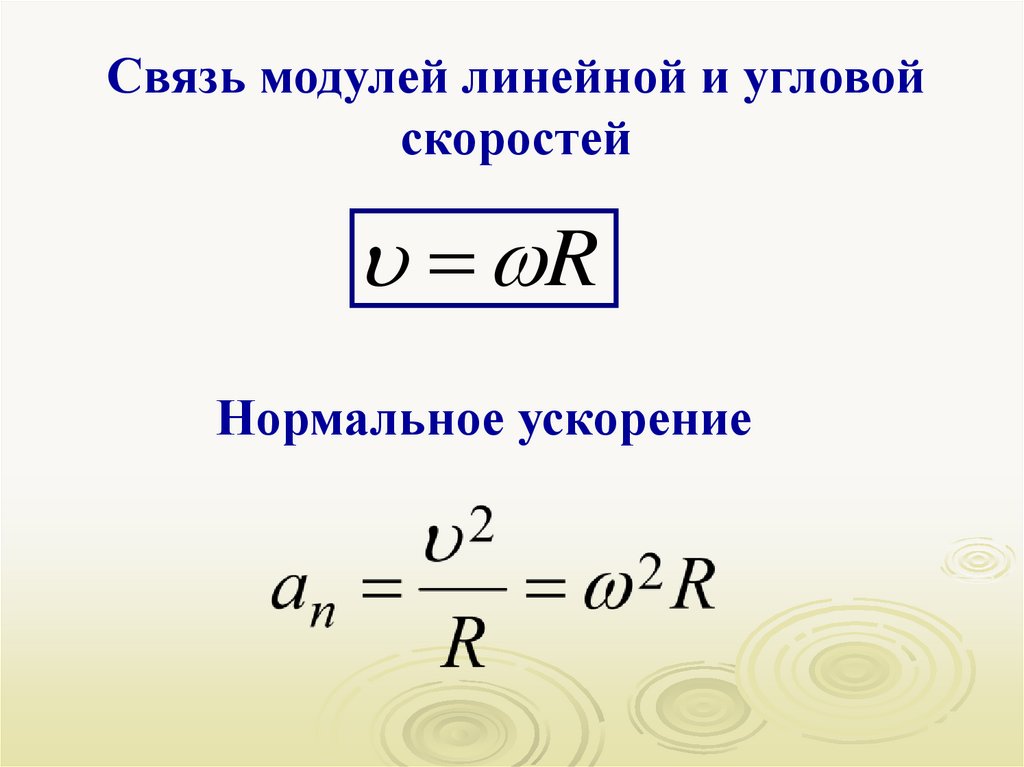
35.
Связь модулей линейной и угловойскоростей
R
Нормальное ускорение
36.
Угловое ускорениеt
d
dt
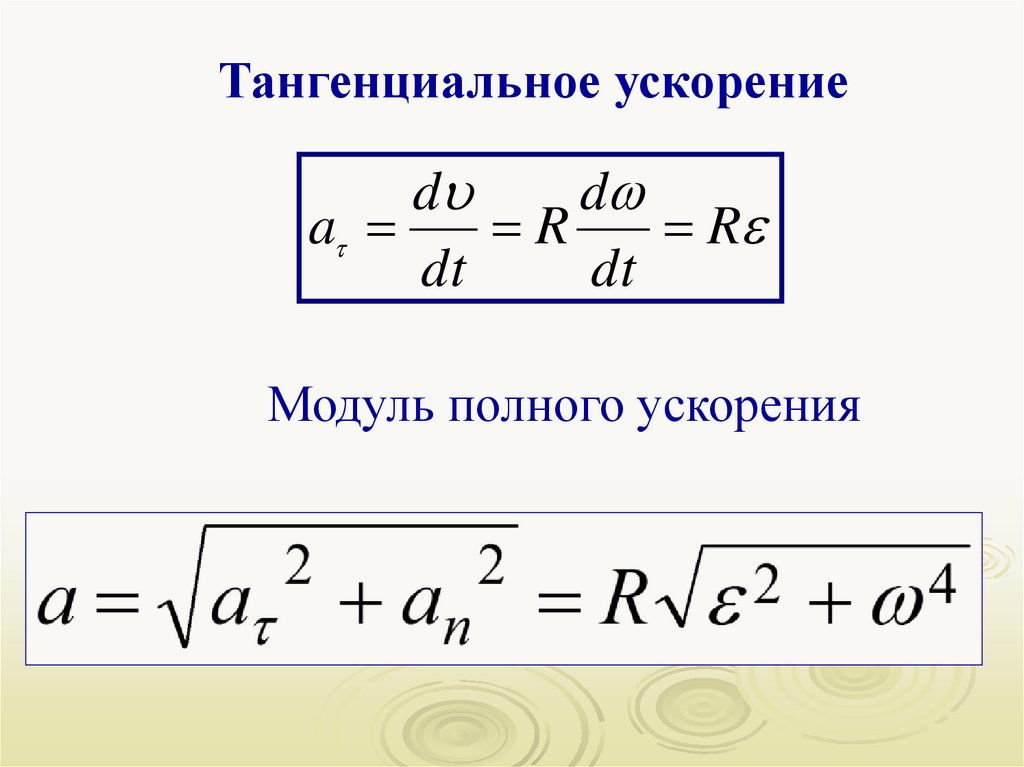
37.
Тангенциальное ускорениеd
d
a
R
R
dt
dt
Модуль полного ускорения
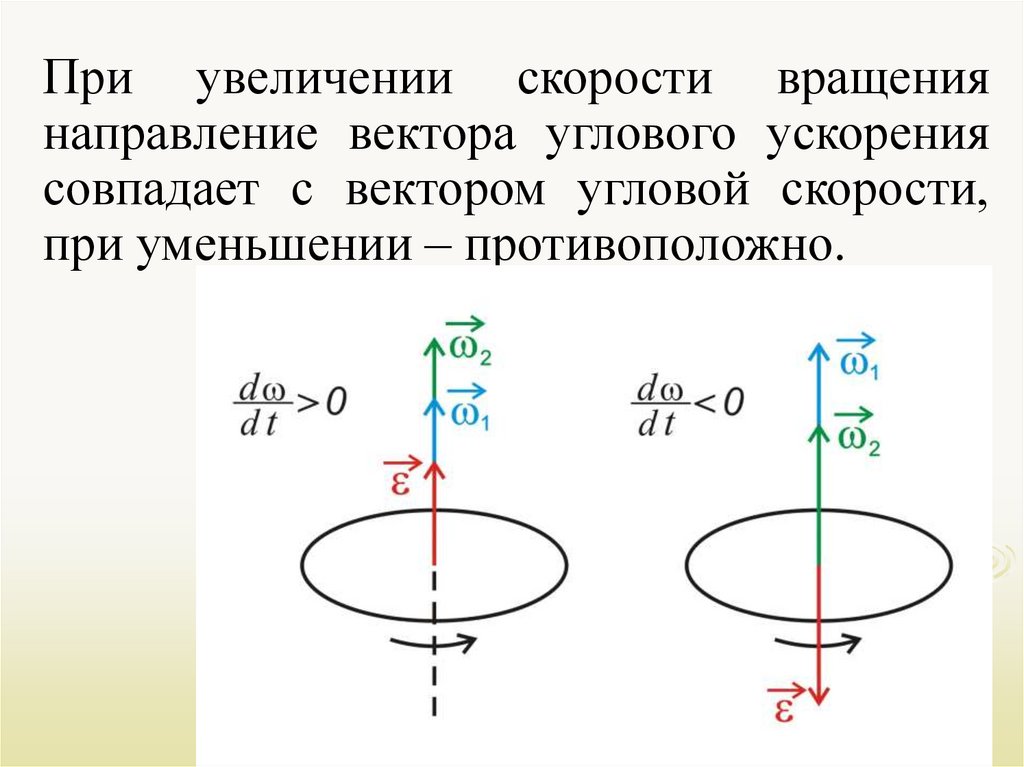
38.
При увеличении скорости вращениянаправление вектора углового ускорения
совпадает с вектором угловой скорости,
при уменьшении – противоположно.