
























 physics
physicsSimilar presentations:







")

")
Физика. Рекомендуемые учебники
1.
ФИЗИКА2. Рекомендуемые учебники:
1. Курс физики – Яворский Б.М.2.Курс общей физики –Савельев И.В.
company name
3. Курс физики – Трофимова Т.И.
3.
Предмет физикиФизика — область естествознания, наука, изучающая
наиболее общие и фундаментальные закономерности,
определяющие структуру и эволюцию материального
мира.
Физика - наука, изучающая общие свойства и законы
движения вещества и поля .
company name
Материя – это объективная реальность, данная нам в
ощущениях.
Поле, наряду с веществом, является одной из форм
существования материи.
4.
Методы физического исследованияОсновными методами физического исследования являются: построение
гипотез, их экспериментальная проверка и разработка теорий.
Гипотеза – это научное предположение, выдвигаемое для объяснения
какого-либо явления (опыта) и требующее проверки и доказательства.
company name
Аристотель (384-322 до н.э.),
древнегреческий философ и учёный.
Эксперимент - метод исследования некоторого явления в управляемых
условиях. Отличается от наблюдения активным взаимодействием с
изучаемым объектом. Обычно эксперимент проводится в рамках
научного исследования и служит для проверки гипотезы.
5.
Методы физического исследованияcompany name
Галилео Галилей (1564-1642 г.),
итальянский физик, астроном и философ
Успешно прошедшая проверку и доказанная гипотеза, превращается в
научный закон или теорию. Физическая теория дает объяснение целой
области явлений природы с единой точки зрения. Физическая теория
предсказывает новые физические законы, которые проверяются в
эксперименте. Таким образом появляется цепочка.
6.
МеханикаМеханика - часть физики, которая изучает закономерности
механического движения и причины, вызывающие или
изменяющие это движение.
company name
Механическое движение - это изменение с течением времени
взаимного расположения тел или их частей.
Галилео Галилей
Исаак Ньютон
Архимед (287–212г. до н.э.) (1564-1642г.)
(1643-1727г.)
основатель механики
окончательно сформировали механику
7.
МеханикаРазделы механики
1.
Кинематика: Рассматривается движение идеализированных тел, без
рассмотрения причин движения.
2.
Динамика: Рассматриваются причины возникновения механического
движения.
3.
Статика: Рассматриваются условия равновесия механических
систем под действием приложенных к ним сил и моментов.
Простейшие физические модели:
company name
• материальная точка - тело, обладающее массой, размерами которого в
данной задаче можно пренебречь.
• абсолютно твердое тело - тело, которое ни при каких условиях не может
деформироваться и при всех условиях расстояние между двумя точками
(или точнее между двумя частицами) этого тела остается постоянным.
8.
КинематикаПоступательное движение - это движение, при котором любая прямая,
жестко связанная с движущимся телом, остается параллельной своему
первоначальному положению.
Вращательное движение - это движение, при котором все точки тела
движутся по окружностям, центры которых лежат на од-ной и той же
прямой, называемой осью вращения.
Любое движение твердого тела можно представить как комбинацию
поступательного и вращательного движений.
company name
Положение материальной точки определяется по отношению к какомулибо другому, произвольно выбранному телу, называемому телом
отсчета.
С телом отсчета связывается система отсчета - совокупность системы
координат и часов.
9. Система отсчета
Система отсчета - совокупность часов, системы координат инекоторого набора тел, по отношению к которым рассматривается
движение тела
Система отсчета:
1. точка отсчета О,
2.связанная
с
ней
координат,
3. хронометр (часы).
company name
Положение точки
задать:
1. координатами x,y,z,
2. радиус-вектором
r
система
М
можно
10. Пространство и время в классической механике
Пространство отражает порядок сосуществованияотдельных объектов, время – порядок смены
явлений.
company name
В классической механике пространство и время:
1) не связаны друг с другом
2) не зависят от объектов и протекающих процессов
11. Свойства пространства и времени
company nameПространство:
1) изотропно – все направления равноправны
2) однородно – все точки равноправны
3) трехмерно и евклидово
4) тела на свойства пространства не влияют
Единое абсолютное мировое время:
1) течет одинаково и равномерно во всех
системах отсчета
2) независимо от состояния движения тел
12.
Декартова система координатЧисло независимых величин,
полностью определяющих
положение точки в
пространстве, называется
числом степеней свободы.
Кинематические уравнения
движения материальной точки
company name
x=x(t) y=y(t) z=z(t)
где i,j,k – координатные орты, т.е.
единичные векторы, направленные
вдоль положительного направления
координатных осей x,y,z
13.
Траектория, путь, перемещениеТраектория — линия, описываемая в пространстве движущейся точкой.
company name
x=x(t) y=y(t) z=z(t)
Длина участка траектории, пройденного материальной точкой с
момента начала отсчета времени, называется длиной пути и
является скалярной функцией времени.
S S (t )
14. Виды траекторий
company nameПрямолинейная
Криволинейная
15.
Траектория, путь, перемещениеПеремещение - векторная величина.
r
Вектор
проведенный из начального положения движущейся точки в
company name
положение ее в данный момент времени (приращение радиуса-вектора
точки
за
рассматриваемый
промежуток
времени),
называется
перемещением.
При прямолинейном движении вектор перемещения совпадает с
соответствующим участком траектории и модуль перемещения r равен
пройденному пути S .
16.
Проекции вектора перемещенияВектор перемещения (или просто перемещение) – это направленный
отрезок прямой, соединяющий начальное положение тела с его
последующим положением. Перемещение – величина векторная. Вектор
перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который
соединяет начальную и конечную точки движения) может быть равен
пройденному пути или быть меньше пройденного пути. Но никогда
модуль вектора перемещения не может быть больше пройденного
пути.
проекция вектора перемещения
на ось ОХ:
company name
Sx = AxBx
Sx = x – x0
17.
Проекции вектора перемещенияпроекция вектора перемещения
на ось ОY и OZ:
Sy = y – y0
Sz = z – z0
company name
Здесь x0, y0, z0 - начальные координаты, или координаты начального
положения тела (материальной точки); x, y, z - конечные координаты,
или координаты последующего положения тела (материальной
точки).
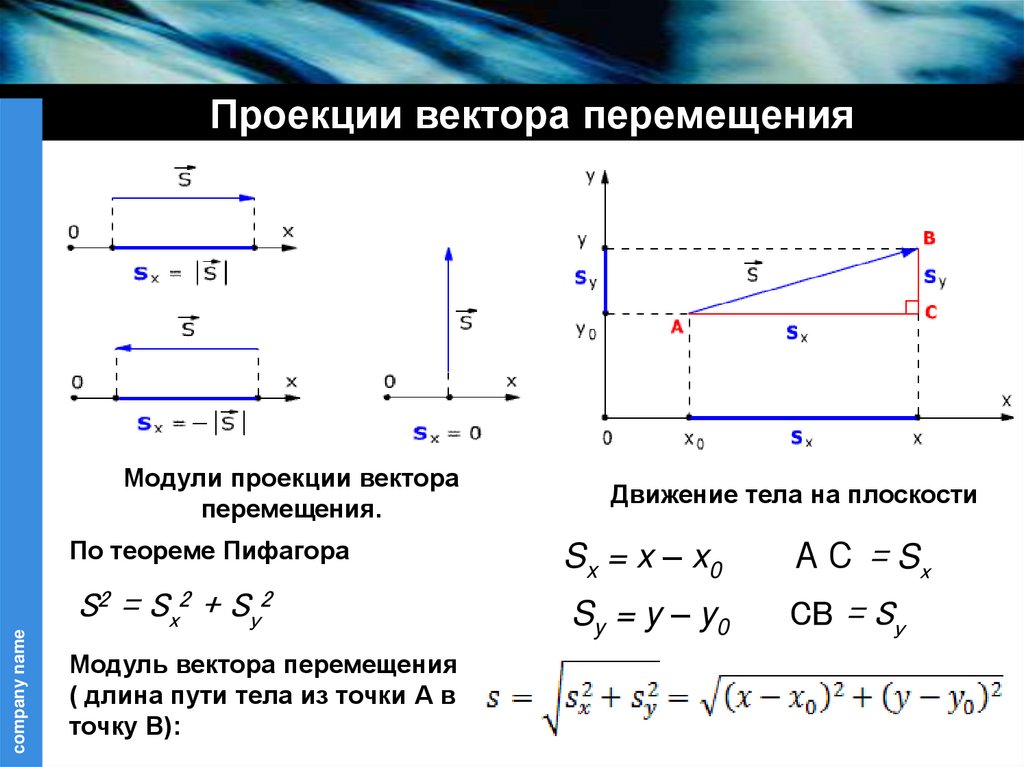
18.
Проекции вектора перемещенияcompany name
Модули проекции вектора
перемещения.
Движение тела на плоскости
По теореме Пифагора
Sx = x – x0
АС = Sx
S2 = Sx2 + Sy2
Sy = y – y0
CB = Sy
Модуль вектора перемещения
( длина пути тела из точки А в
точку В):
19.
СкоростьДля характеристики движения материальной точки вводится векторная
величина - скорость, которой определяется как быстрота движения, так и
его направление в данный момент времени.
Вектор средней скорости:
Вектор мгновенной скорости:
company name
t t
Следовательно:
При равномерном движении:
и
s vdt
s v t
t
20.
УскорениеФизической величиной, характеризующей быстроту изменения скорости
по модулю и направлению,
является ускорение.
Вектор среднего ускорения:
v
a
t
Вектор мгновенного ускорения:
При прямолинейном равнопеременном движении:
company name
, следовательно
21.
Ускорение при вращательном движенииТангенциальная составляющая ускорения:
Нормальная составляющая ускорения:
company name
Также называют центростремительным ускорением
Полное ускорение:
22. Нормальное и тангенциальное ускорение
a a ancompany name
dV
a
dt
2
V
an
R
Тангенциальное
ускорение
направлено
по
касательной к траектории, характеризует
быстроту изменения скорости по модулю
Нормальное ускорение направлено всегда к
центру кривизны траектории, характеризует
быстроту изменения скорости по направлению
23.
Виды движений1) прямолинейное равномерное движение
2) прямолинейное равнопеременное движение
company name
Обозначив
24.
Виды движений3) прямолинейное движение с переменным ускорением
4)
равномерное движение по окружности
5) равномерное криволинейное движение
company name
6) криволинейное равнопеременное движение
7) криволинейное движение с переменным ускорением
25. Вращательное движение
угол поворота радcompany name
d угловая скорость
dt
d d
2
dt
dt
2
угловое ускорение
рад
с
рад
с2
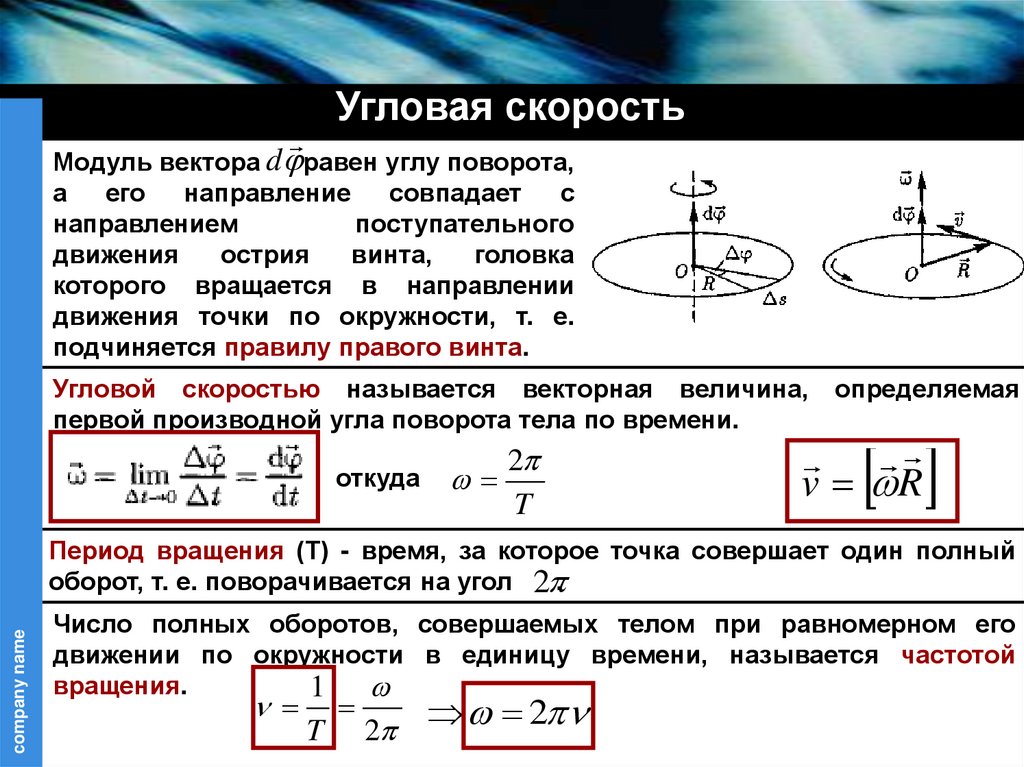
26.
Угловая скоростьМодуль вектора d равен углу поворота,
а его направление совпадает с
направлением
поступательного
движения
острия
винта,
головка
которого вращается в направлении
движения точки по окружности, т. е.
подчиняется правилу правого винта.
Угловой скоростью называется векторная величина,
первой производной угла поворота тела по времени.
2
откуда
T
определяемая
v R
company name
Период вращения (Т) - время, за которое точка совершает один полный
оборот, т. е. поворачивается на угол 2 .
Число полных оборотов, совершаемых телом при равномерном его
движении по окружности в единицу времени, называется частотой
вращения.
1
T
2
2
27.
Угловое ускорениеУгловым ускорением называется векторная величина, определяемая
первой производной угловой скорости по времени.
Зная, что v R
,
,
можно найти
company name
и
В случае равнопеременного движения точки по окружности:
28. Связь угловых и линейных величин
company nameСвязь угловых и линейных величин