

 mechanics
mechanicsSimilar presentations:







")

Планування польотних випробувань безпілотного літального апарату для ідентифікації його параметрів
1.
ПЛАНУВАННЯ ПОЛЬОТНИХ ВИПРОБУВАНЬБЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТУ ДЛЯ
ІДЕНТИФІКАЦІЇ ЙОГО ПАРАМЕТРІВ
ВИКОНАВ:
ЗДОБУВАЧ ВИЩОЇ ОСВІТИ 4-ГО КУРСУ
СО «БАКАЛАВР» СПЕЦІАЛЬНОСТІ 173
«АВІОНІКА»
СТУДЕНТ ГРУПИ АС-91, НН ІАТ
КОБИЛОЧНИЙ АНДРІЙ ПАВЛОВИЧ
2.
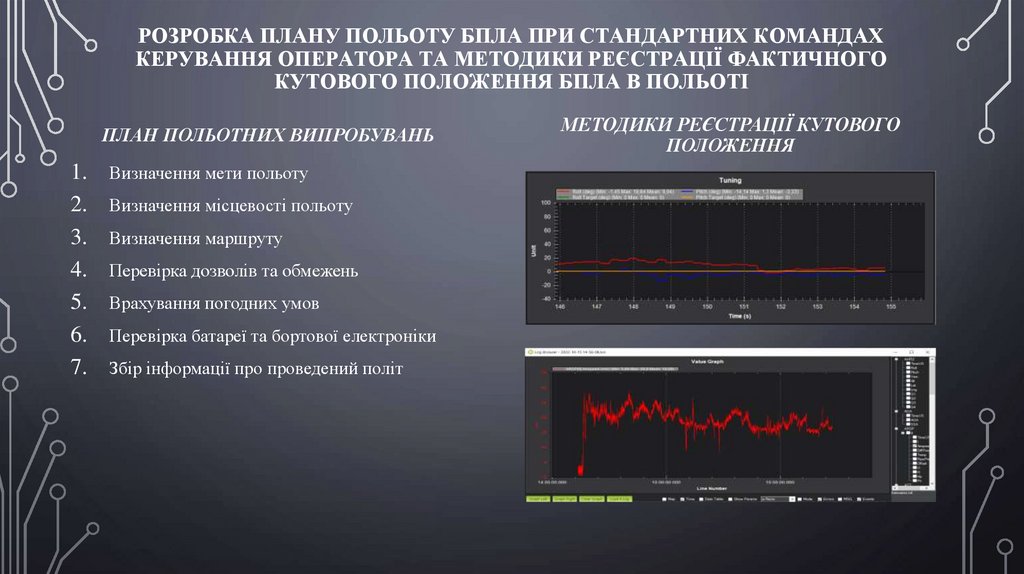
РОЗРОБКА ПЛАНУ ПОЛЬОТУ БПЛА ПРИ СТАНДАРТНИХ КОМАНДАХКЕРУВАННЯ ОПЕРАТОРА ТА МЕТОДИКИ РЕЄСТРАЦІЇ ФАКТИЧНОГО
КУТОВОГО ПОЛОЖЕННЯ БПЛА В ПОЛЬОТІ
ПЛАН ПОЛЬОТНИХ ВИПРОБУВАНЬ
1.
2.
3.
4.
5.
6.
7.
Визначення мети польоту
Визначення місцевості польоту
Визначення маршруту
Перевірка дозволів та обмежень
Врахування погодних умов
Перевірка батареї та бортової електроніки
Збір інформації про проведений політ
МЕТОДИКИ РЕЄСТРАЦІЇ КУТОВОГО
ПОЛОЖЕННЯ
3.
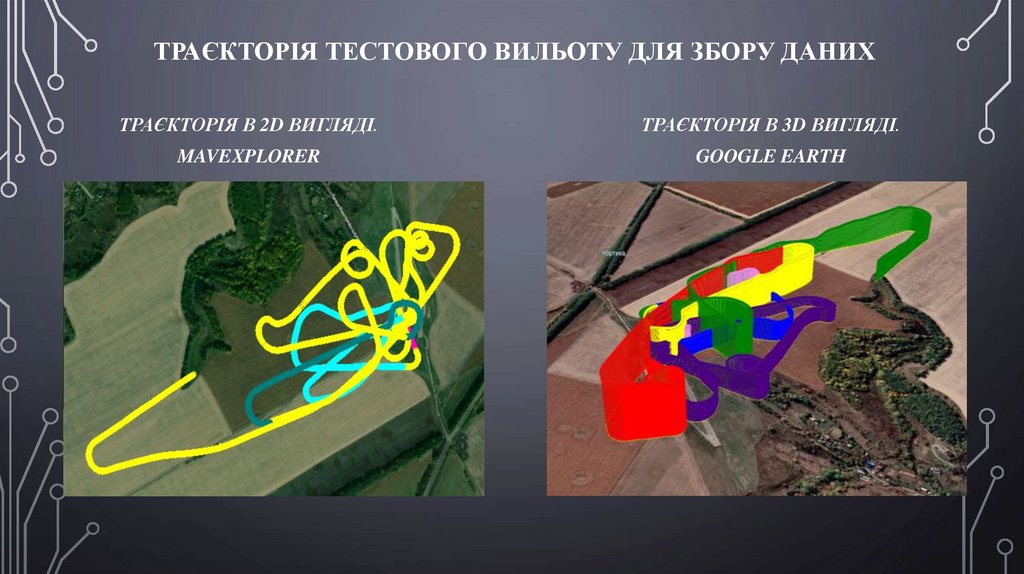
ТРАЄКТОРІЯ ТЕСТОВОГО ВИЛЬОТУ ДЛЯ ЗБОРУ ДАНИХТРАЄКТОРІЯ В 2D ВИГЛЯДІ.
ТРАЄКТОРІЯ В 3D ВИГЛЯДІ.
MAVEXPLORER
GOOGLE EARTH
4.
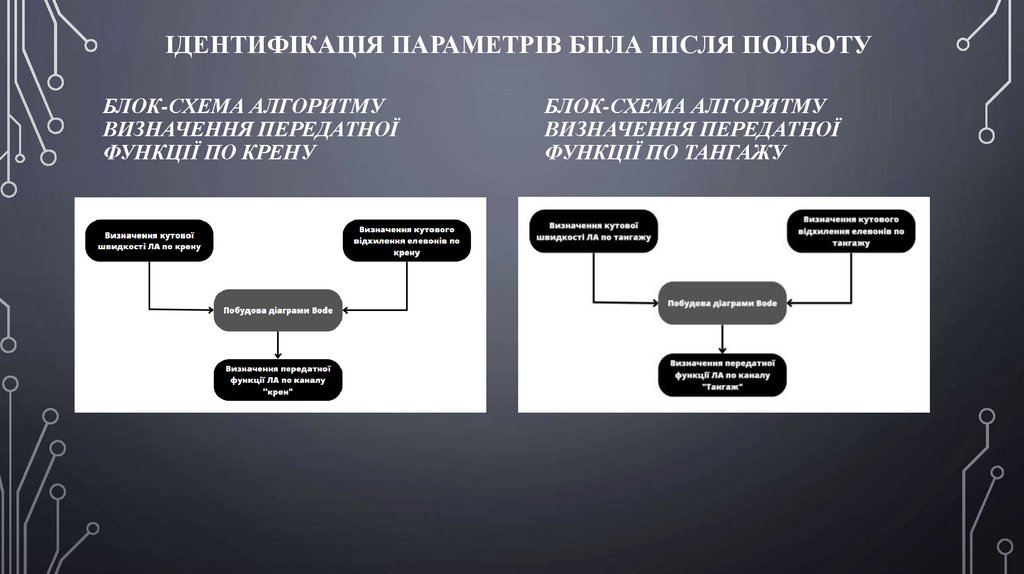
ІДЕНТИФІКАЦІЯ ПАРАМЕТРІВ БПЛА ПІСЛЯ ПОЛЬОТУБЛОК-СХЕМА АЛГОРИТМУ
ВИЗНАЧЕННЯ ПЕРЕДАТНОЇ
ФУНКЦІЇ ПО КРЕНУ
БЛОК-СХЕМА АЛГОРИТМУ
ВИЗНАЧЕННЯ ПЕРЕДАТНОЇ
ФУНКЦІЇ ПО ТАНГАЖУ
5.
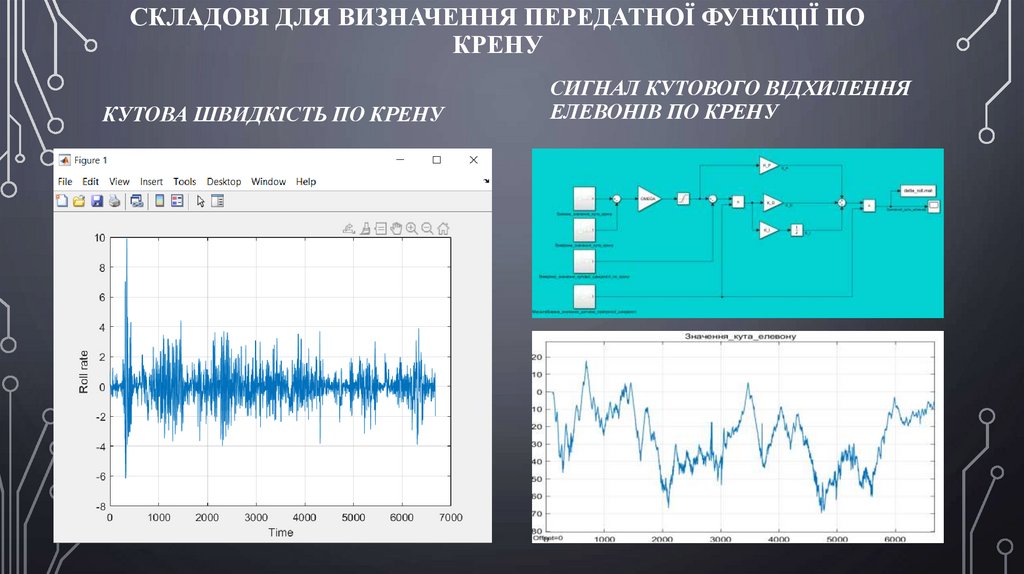
СКЛАДОВІ ДЛЯ ВИЗНАЧЕННЯ ПЕРЕДАТНОЇ ФУНКЦІЇ ПОКРЕНУ
КУТОВА ШВИДКІСТЬ ПО КРЕНУ
СИГНАЛ КУТОВОГО ВІДХИЛЕННЯ
ЕЛЕВОНІВ ПО КРЕНУ
6.
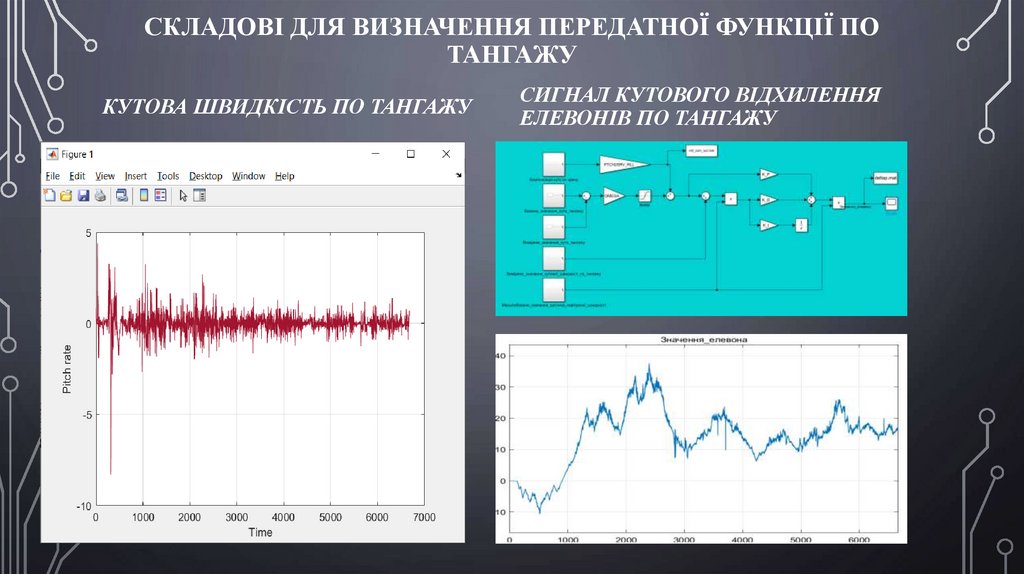
СКЛАДОВІ ДЛЯ ВИЗНАЧЕННЯ ПЕРЕДАТНОЇ ФУНКЦІЇ ПОТАНГАЖУ
КУТОВА ШВИДКІСТЬ ПО ТАНГАЖУ
СИГНАЛ КУТОВОГО ВІДХИЛЕННЯ
ЕЛЕВОНІВ ПО ТАНГАЖУ
7.
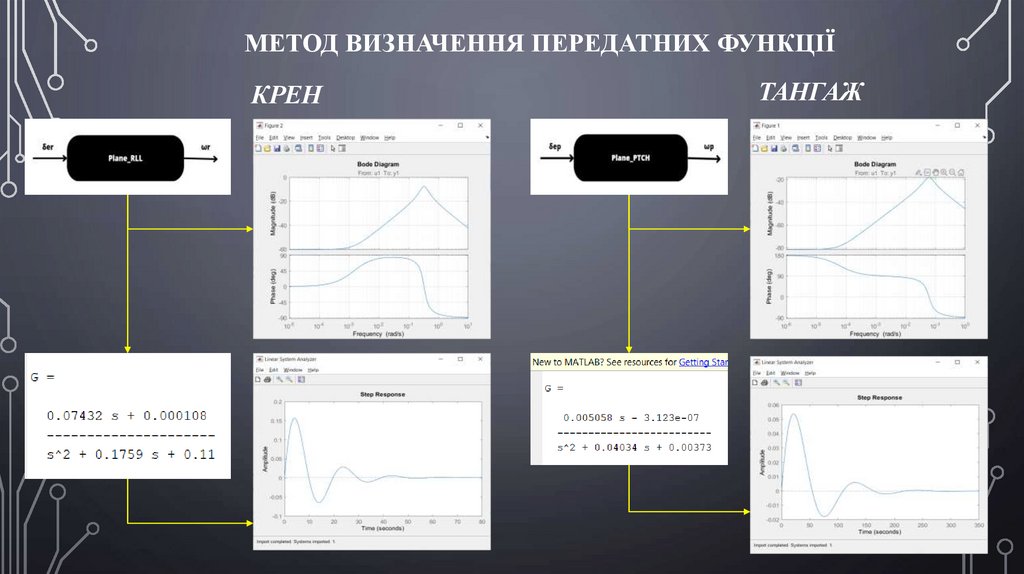
МЕТОД ВИЗНАЧЕННЯ ПЕРЕДАТНИХ ФУНКЦІЇКРЕН
ТАНГАЖ
8.
МЕТОДИ НАЛАШТУВАННЯ ПАРАМЕТРІВ СИСТЕМИ КЕРУВАННЯЛІТАЛЬНОГО АПАРАТУ
Враховуючи те, що ПІД-регулятор як система придумана дуже давно і
відповідно методів налаштувань є також багато. Основні методи були
виявлені емпіричним шляхом, тобто на практичній основі досліджень.
• Ziegler-Nichols closed-loop tuning method
• Cohen-Coon Method
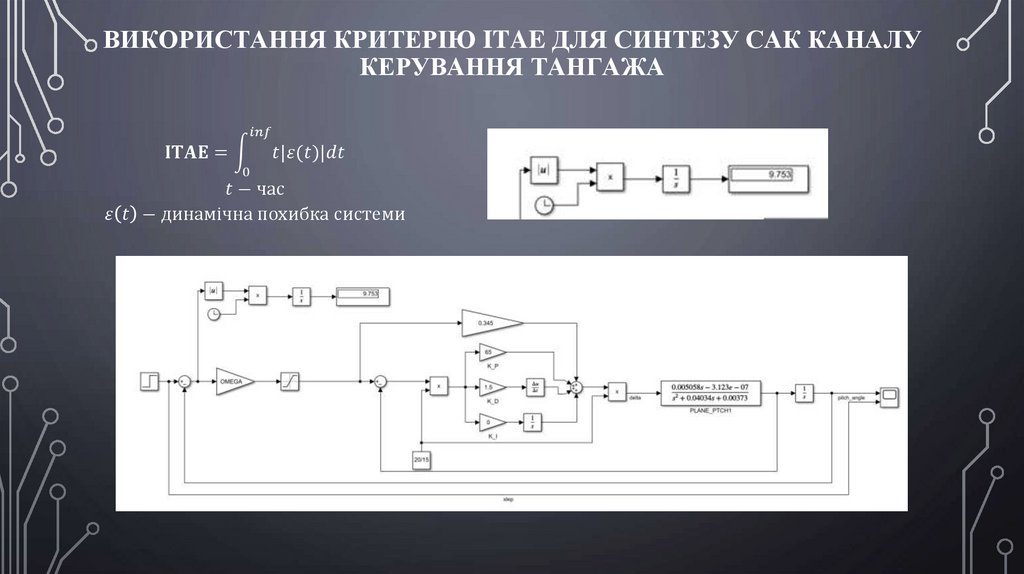
• ITAE (Integral of Time multiplied by Absolute Error)
9.
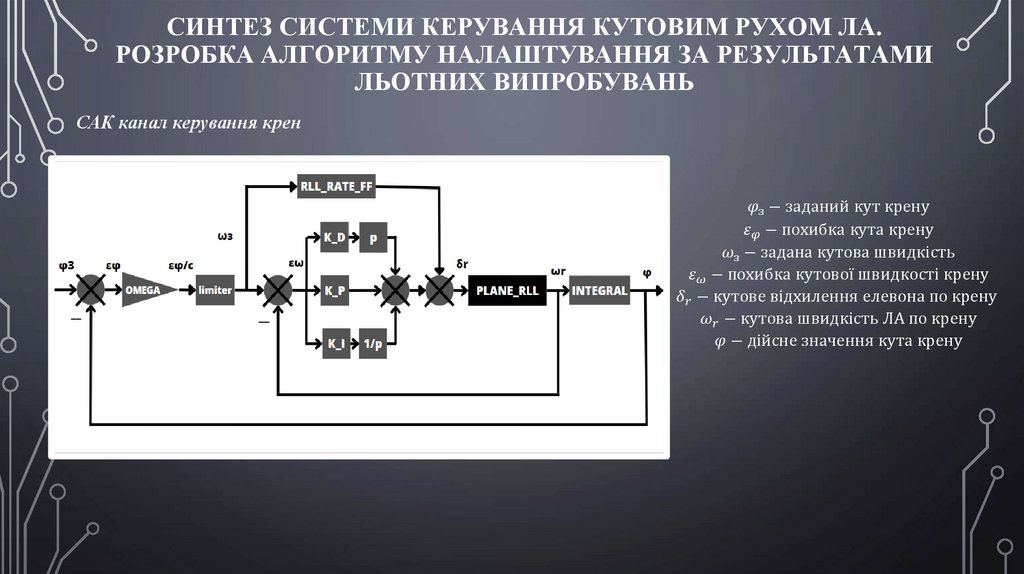
СИНТЕЗ СИСТЕМИ КЕРУВАННЯ КУТОВИМ РУХОМ ЛА.РОЗРОБКА АЛГОРИТМУ НАЛАШТУВАННЯ ЗА РЕЗУЛЬТАТАМИ
ЛЬОТНИХ ВИПРОБУВАНЬ
САК канал керування крен