

 informatics
informatics mechanics
mechanicsSimilar presentations:






")


")
Структурна схема автоматичного управління транспортними засобами на дорозі
1.
ПОСТАНОВКА ЗАДАЧІОб‘єкт - транспортний засіб.
Предмет – процес управління рухом транспортного засобу у
заданому напрямку.
Мета роботи - розробка системи управління рухом
транспортного засобу у заданому напрямку.
Задачі:
– проаналізувати існуючі системи управління рухом;
– розглянут супутникові навігаційні системи;
– спроектувати гіроскоп, що динамічно настроюється;
– провести моделювання динамічних властивостей РВГ.
Задачі дослідження вирішити методами аналізу та синтезу
систем автоматичного управління методом найменших
квадратів.
3
2.
СТРУКТУРНА СХЕМААВТОМАТИЧНОГО УПРАВЛІННЯ
ТРАНСПОРТНИМИ ЗАСОБАМИ НА
ДОРОЗІ
Виток виявлення
Антена
Полотно
дороги
Кабель зі струмом
високої частоти
Індикатор
Сигнальний
генератор
Індикатор
Сигнальний
генератор
Індикатор
Сигнальний
генератор
Сигнальний
генератор
4
3.
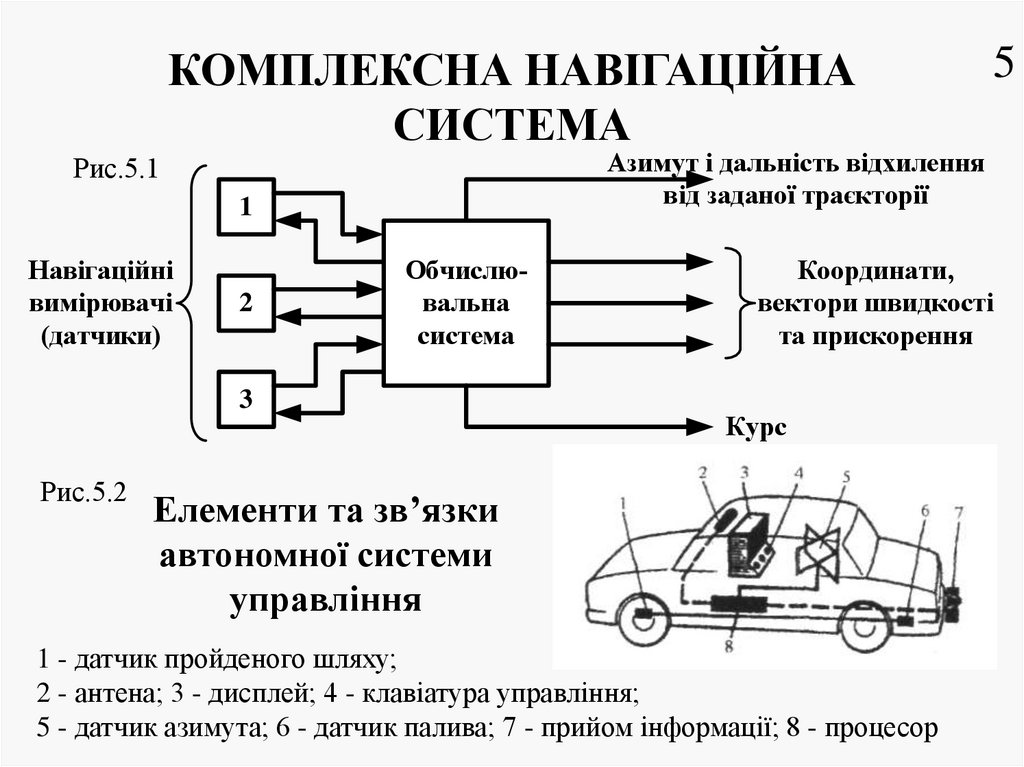
КОМПЛЕКСНА НАВІГАЦІЙНАСИСТЕМА
Азимут і дальність відхилення
від заданої траєкторії
Рис.5.1
1
Навігаційні
вимірювачі
(датчики)
2
Обчислювальна
система
3
Рис.5.2
5
Координати,
вектори швидкості
та прискорення
Курс
Елементи та зв’язки
автономної системи
управління
1 - датчик пройденого шляху;
2 - антена; 3 - дисплей; 4 - клавіатура управління;
5 - датчик азимута; 6 - датчик палива; 7 - прийом інформації; 8 - процесор
4.
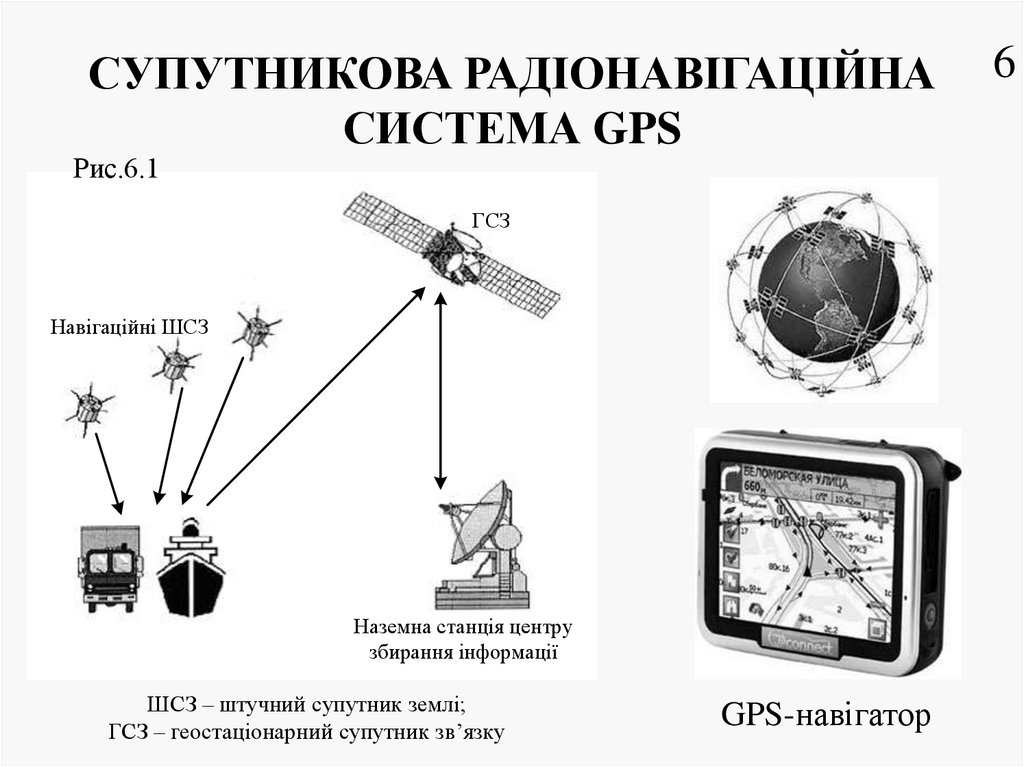
СУПУТНИКОВА РАДІОНАВІГАЦІЙНАСИСТЕМА GPS
Рис.6.1
ГСЗ
Навігаційні ШСЗ
Наземна станція центру
збирання інформації
ШСЗ – штучний супутник землі;
ГСЗ – геостаціонарний супутник зв’язку
GPS-навігатор
6
5.
АПАРАТНО-ПРОГРАМНИЙ КОМПЛЕКС 76.
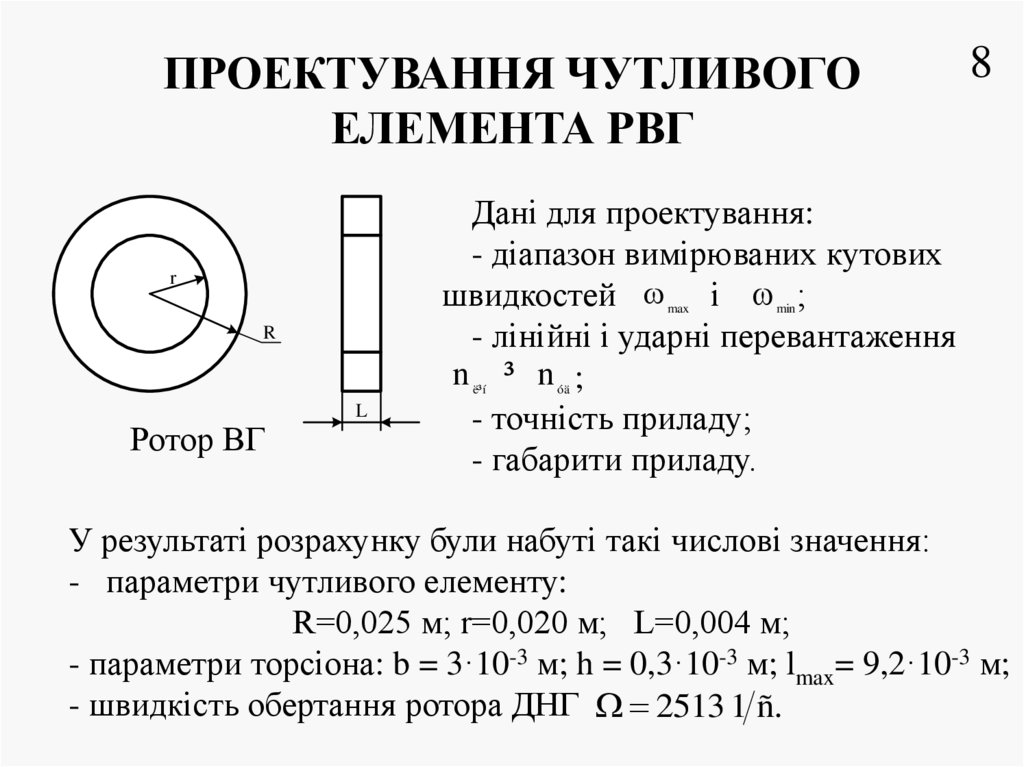
ПРОЕКТУВАННЯ ЧУТЛИВОГОЕЛЕМЕНТА РВГ
r
Дані для проектування:
- діапазон вимірюваних кутових
швидкостей і ;
- лінійні і ударні перевантаження
n ³ n ;
- точність приладу;
- габарити приладу.
max
R
ë³í
Ротор ВГ
L
8
min
óä
У результаті розрахунку були набуті такі числові значення:
- параметри чутливого елементу:
R=0,025 м; r=0,020 м; L=0,004 м;
- параметри торсіона: b = 3·10-3 м; h = 0,3·10-3 м; lmax= 9,2·10-3 м;
- швидкість обертання ротора ДНГ 2513 1 ñ.
7.
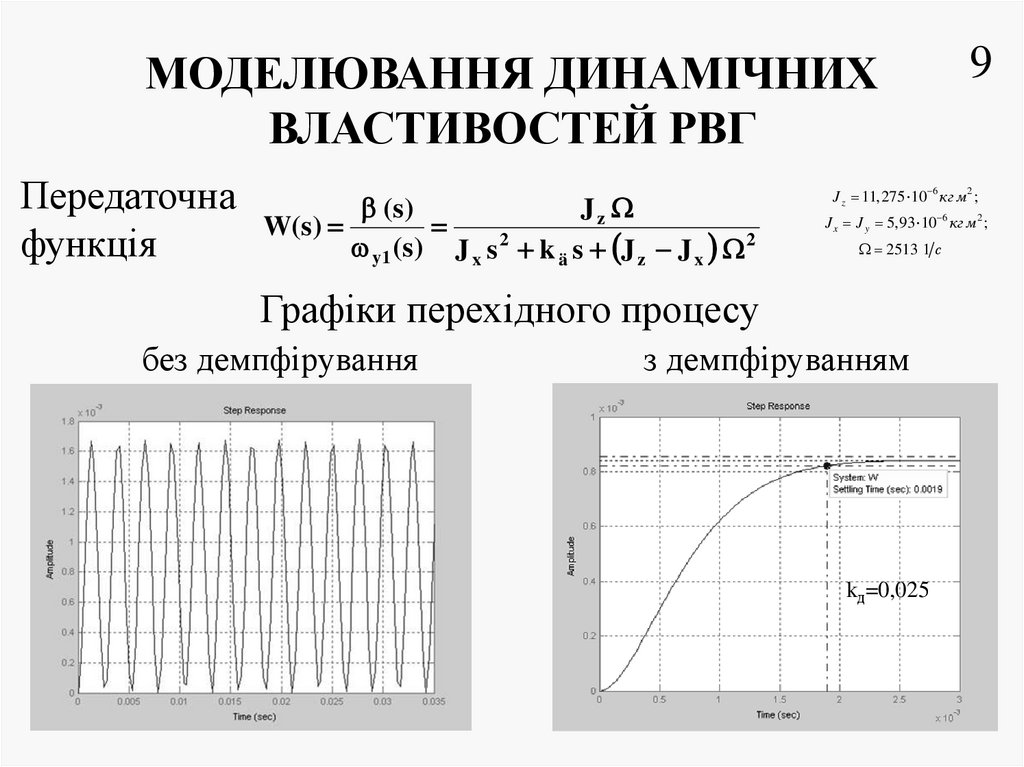
МОДЕЛЮВАННЯ ДИНАМІЧНИХВЛАСТИВОСТЕЙ РВГ
Передаточна
Jz
(s )
W(s)
y1 (s) J x s 2 k ä s J z J x 2
функція
J z 11, 275 10 6 кг м 2 ;
J x J y 5,93 10 6 кг м 2 ;
2513 1 с
Графіки перехідного процесу
без демпфірування
9
з демпфіруванням
kд=0,025
8.
ВИСНОВКИ10
Розробка систем автоматичного водіння є однією з основних
проблем створювання автотранспортних засобів.
Супутникові навігаційні системи широко використовуються
для визначення місця розташування і супроводження рухомих
об'єктів.
Різні фірми активно створюють нові GPS – пристрої,
застосовувані на дорожніх машинах.
Навігаційна апаратура споживачів, встановлювана на
наземному рухомому об’єкті, обов’язково повинна містити датчик
кутової швидкості повороту в азімуті (наприклад, вібраційний
гіроскоп).
Одержані результати свідчать про можливість створення
системи управління руху транспортного засобу у відповідності до
вимог завдання.