
 industry
industrySimilar presentations:









")
Разработка мехатронной системы автоматического перемещения крана-штабелера копрового цеха ПАО «ЧМК»
1.
Министерство науки и высшего образования Российской ФедерацииФедеральное государственное автономное образовательное учреждение высшего
образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Политехнический институт факультет Машиностроения
Кафедра «Мехатроника и автоматизация»
Направление «Мехатроника»
РАЗРАБОТКА МЕХАТРОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО
ПЕРЕМЕЩЕНИЯ КРАНА-ШТАБЕЛЕРА КОПРОВОГО ЦЕХА ПАО «ЧМК»
Руководитель: Е.А. Гартлиб
Автор работы: студент группы П-264 Д.А. Курушкин
1
2.
Цель выпускной квалификационной работы• Разработать систему автоматического перемещения крана-штабелера
копрового цеха ПАО «ЧМК»
Задачи выпускной квалификационной работы
• Проанализировать технологический процесс склада копрового цеха;
• Разработать систему автоматического перемещения крана;
• Смоделировать систему автоматического регулирования
технологической координаты;
• Разработать HMI панель;
• Разработать электрические чертежи;
• Рассчитать технико-экономические показатели.
2
3.
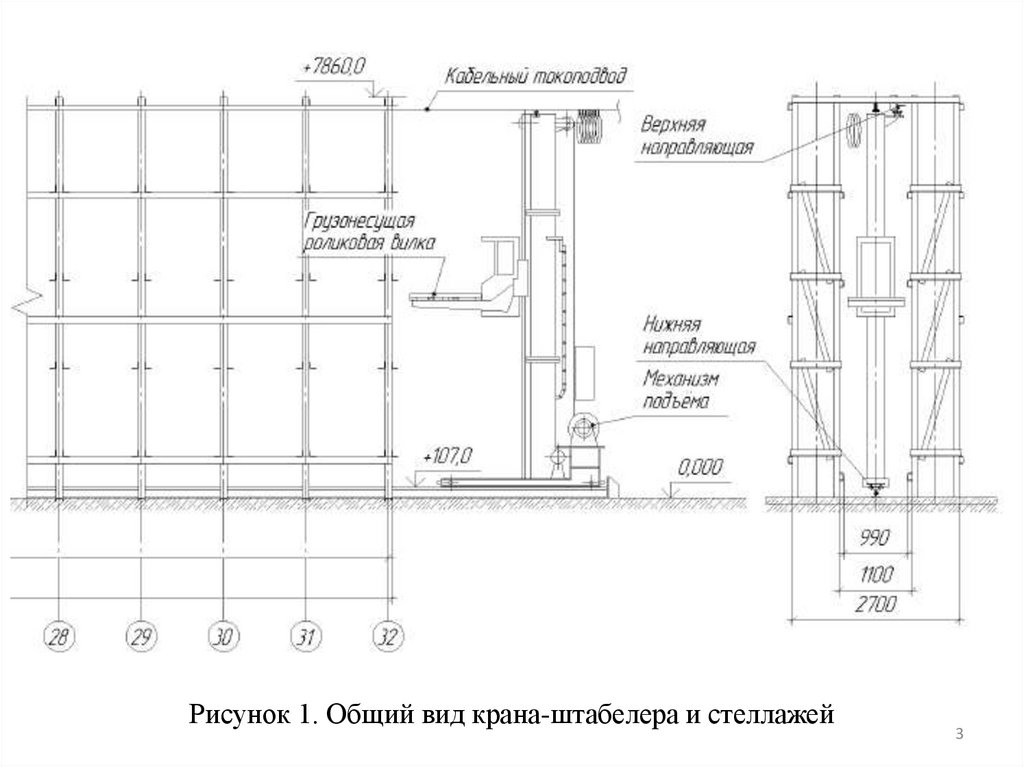
Рисунок 1. Общий вид крана-штабелера и стеллажей3
4.
Требования к приводуОграничение скорости при перемещении крана по X - 1,6 м/c;
Ограничение по ускорению по X – 0,4 м/с2;
Ограничение скорости при перемещении крана по Y – 0,35 м/c;
Ограничение ускорения по Y – 0,25 м/с2;
Ограничение скорости при перемещении крана по Z – 0,3 м/c.
Ограничение ускорения по Z – 0,25 м/с2;
Точность остановки в заданной позиции не более ±10мм;
Привод работает в реверсе.
Требования к системе автоматизации
Быстродействие системы на уровне контроллера не более 30 мс;
Система автоматизация должна быть открытой;
Система автоматизации должна работать в реальном времени;
Система автоматизации должна обеспечивать сбор, хранение, передачу
данных.
4
5.
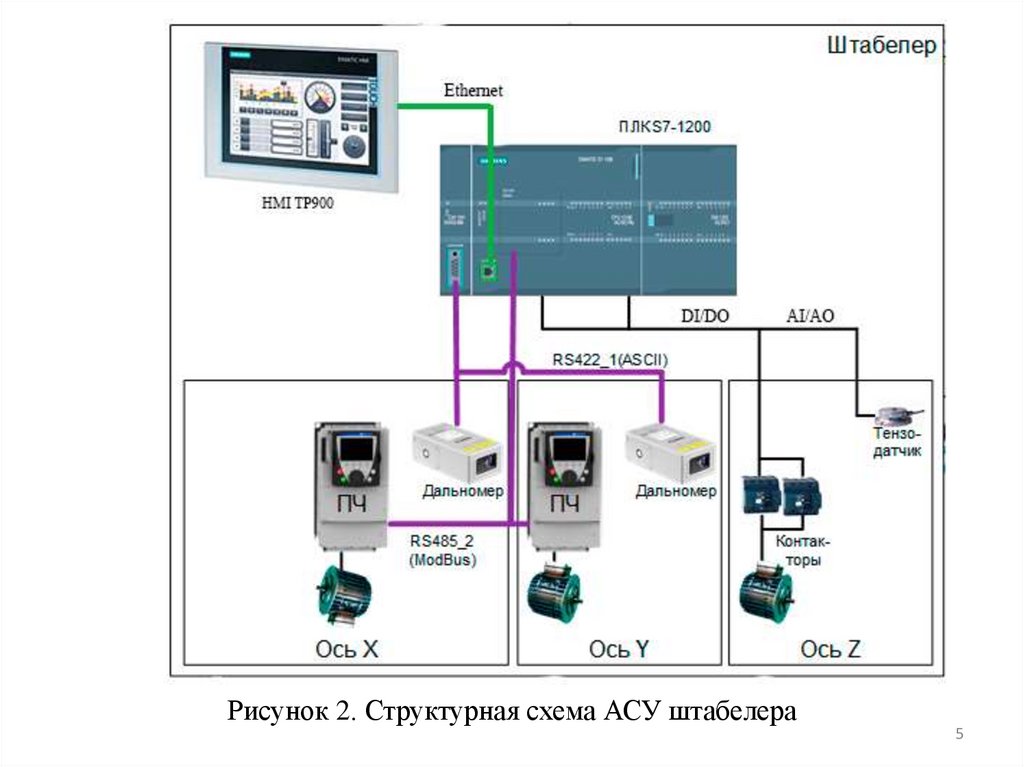
Рисунок 2. Структурная схема АСУ штабелера5
6.
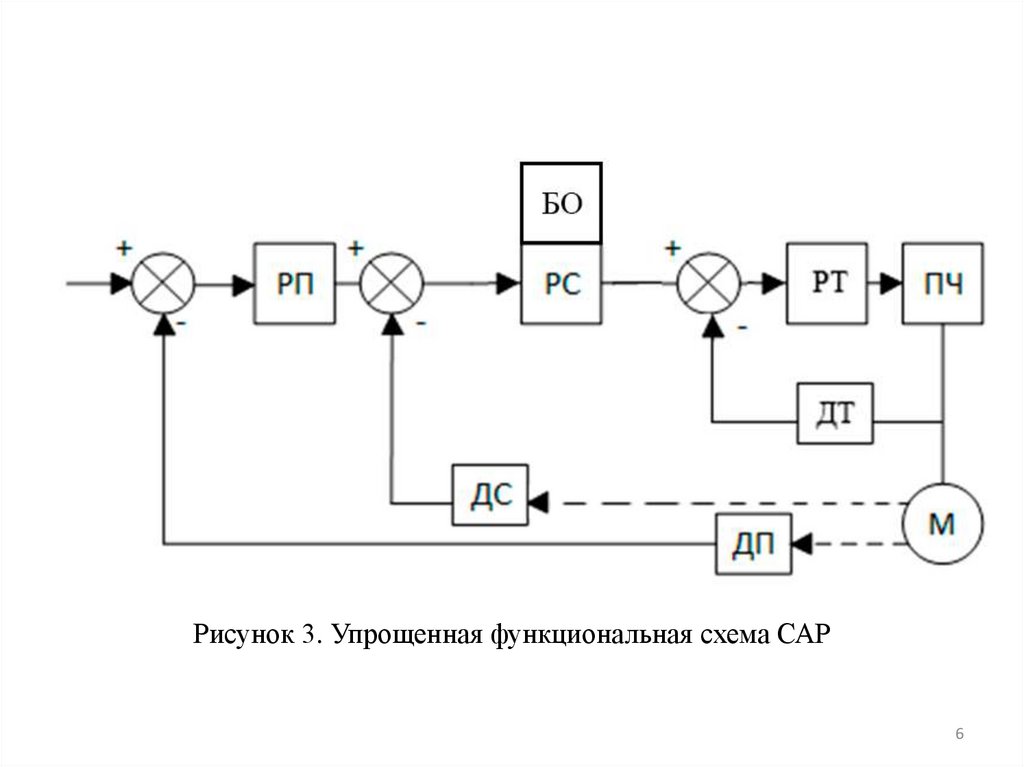
Рисунок 3. Упрощенная функциональная схема САР6
7.
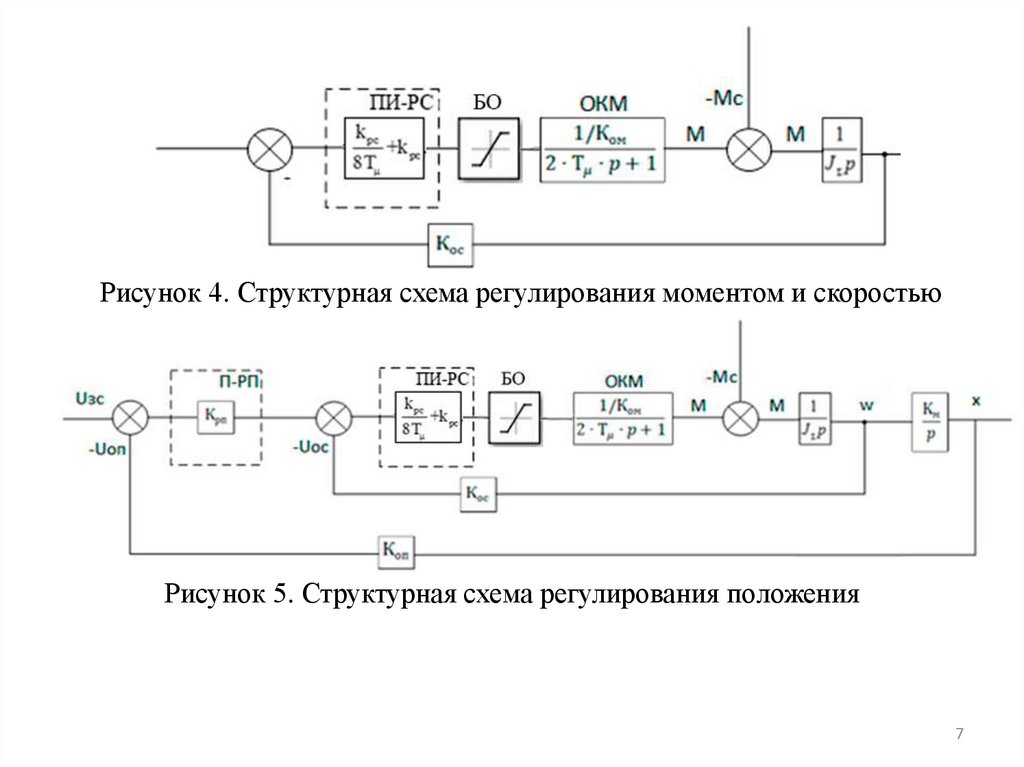
Рисунок 4. Структурная схема регулирования моментом и скоростьюРисунок 5. Структурная схема регулирования положения
7
8.
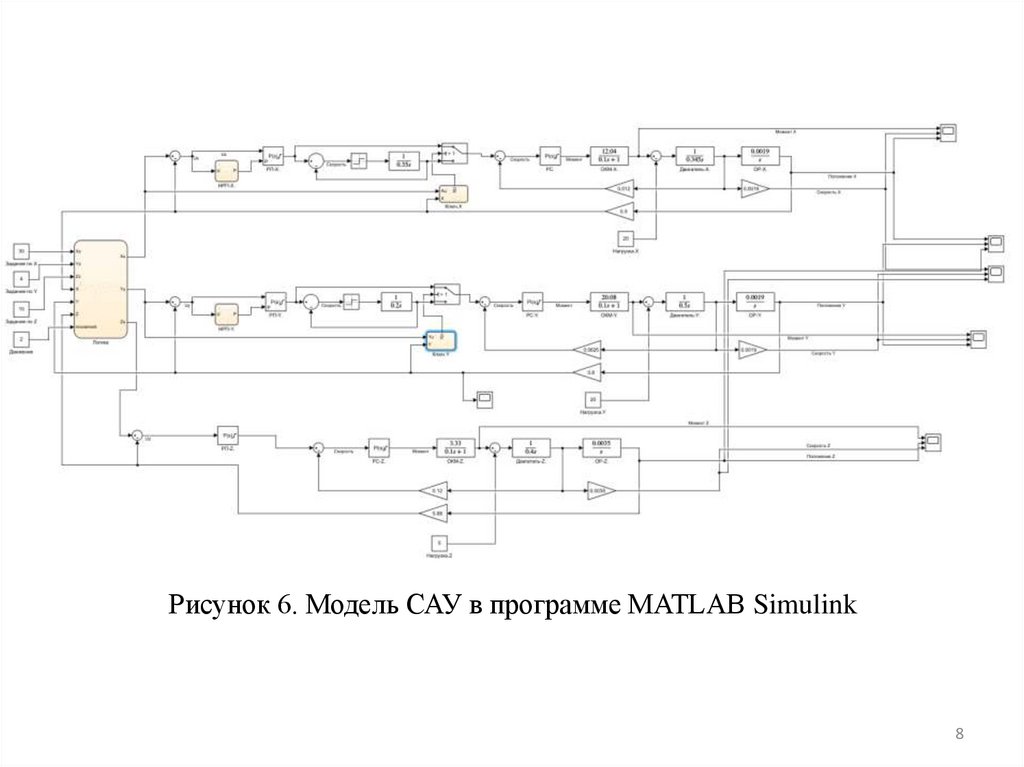
Рисунок 6. Модель САУ в программе MATLAB Simulink8
9.
Рисунок 7. Результат моделирования движения (положения) впоследовательном режиме
9
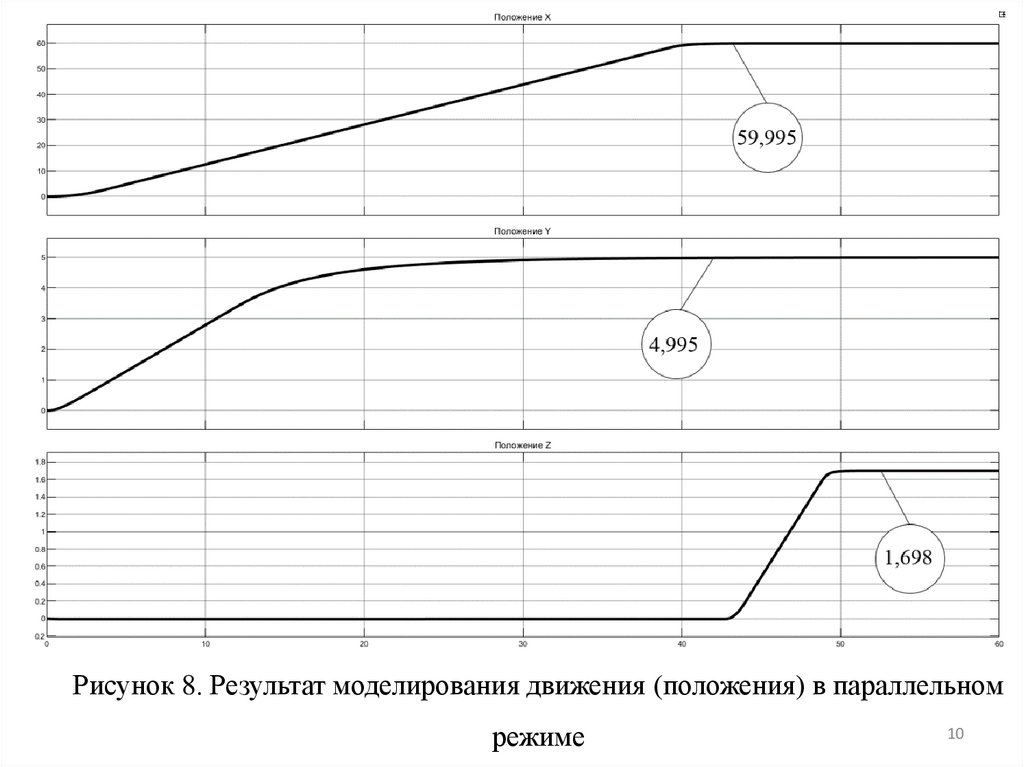
10.
Рисунок 8. Результат моделирования движения (положения) в параллельномрежиме
10
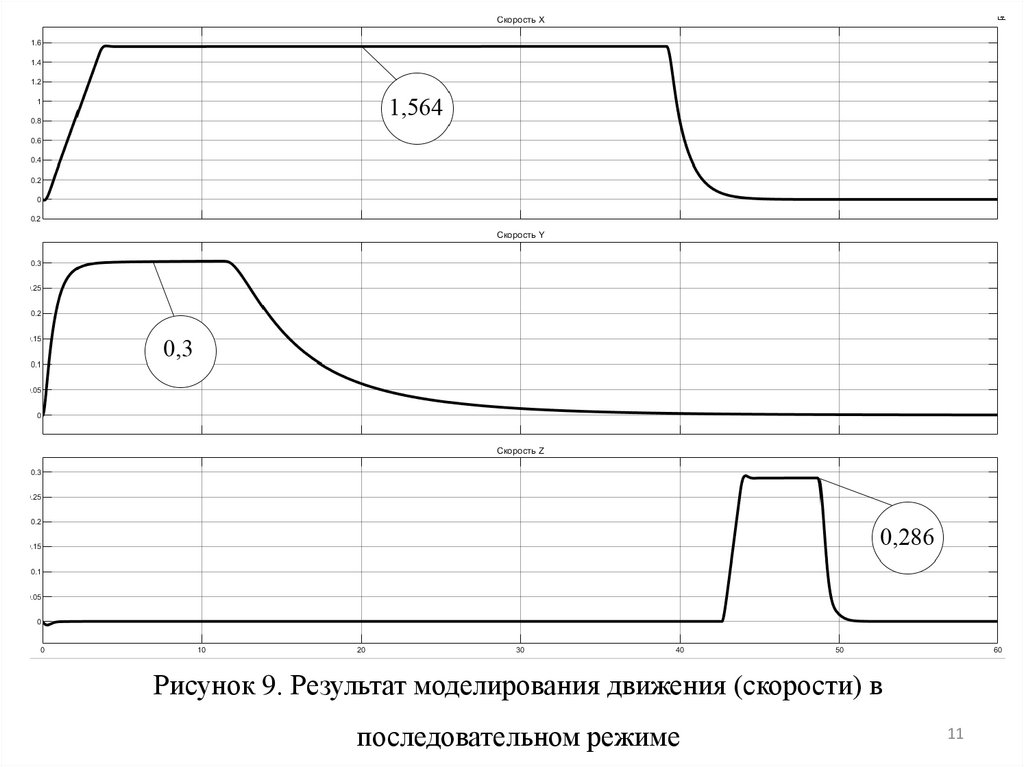
11.
Рисунок 9. Результат моделирования движения (скорости) впоследовательном режиме
11
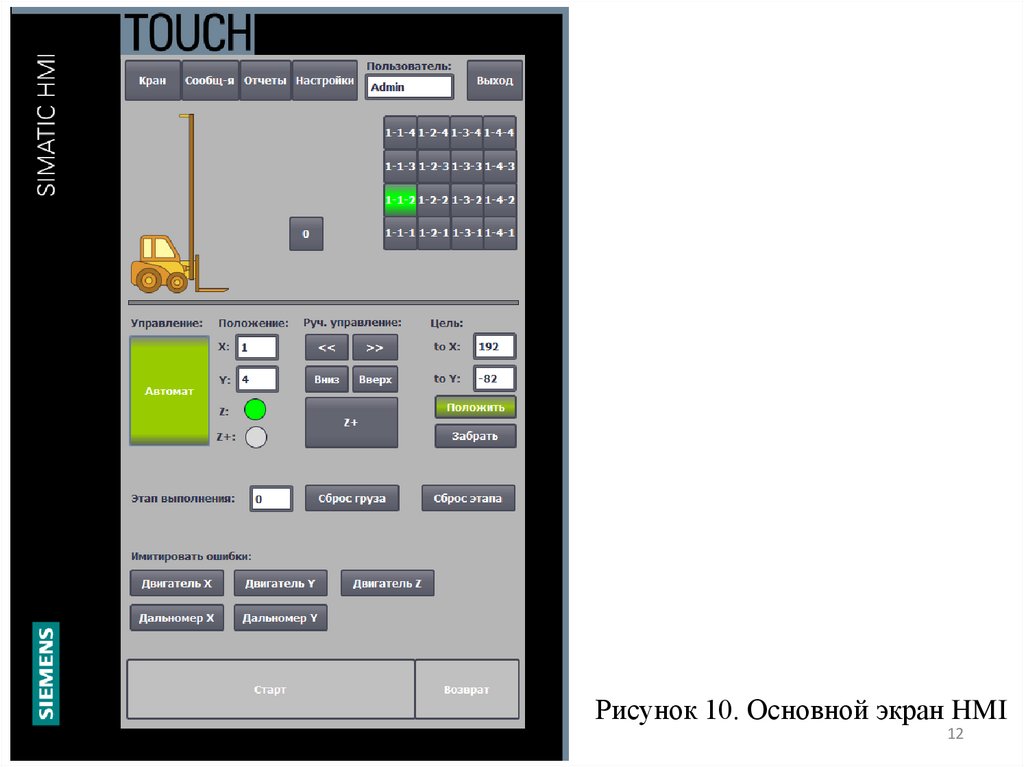
12.
Рисунок 10. Основной экран HMI12
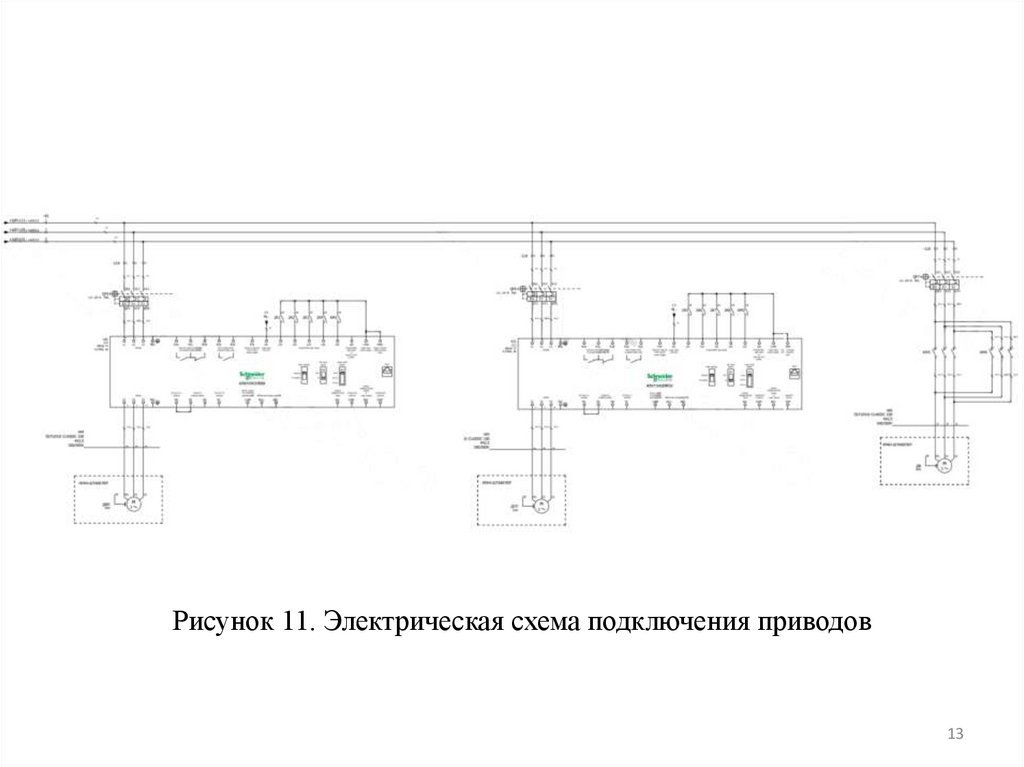
13.
Рисунок 11. Электрическая схема подключения приводов13
14.
ЗаключениеВ ходе проведенной выпускной квалификационной работы была выполнена разработка мехатронной
системы автоматического перемещения крана-штабелера для склада копрового цеха ПАО «ЧМК».
Были
определены
требования
к
электроприводу
и
системе
автоматизации,
смоделирована
математическая модель в программе MATLAB, разработана HMI панель в программе TIA PORTAL,
разработаны электрические чертежи в программе EPLAN.
Были выполнены все необходимые требования по приводу:
1. Ограничение скорости при перемещении крана по X - 1,6 м/c;
2. Ограничение по ускорению по X – 0,4 м/с2;
3. Ограничение скорости при перемещении крана по Y – 0,35 м/c;
4. Ограничение ускорения по Y – 0,25 м/с2;
5. Ограничение скорости при перемещении крана по Z – 0,3 м/c.
6. Ограничение ускорения по Z – 0,25 м/с2;
7. Точность остановки в заданной позиции не более ±10мм;
8. Привод работает в реверсе.
Были выполнены все необходимые требования по автоматизации:
1. Быстродействие системы на уровне контроллера не более 30 мс;
2. Система автоматизация должна быть открытой;
3. Система автоматизации должна работать в реальном времени;
4. Система автоматизации должна обеспечивать сбор, хранение, передачу данных.
14