



 warfare
warfareSimilar presentations:










Стабилизатор орудийной установки
1.
Стабилизатор орудийной установкиВыполнил Курчатов Максим Сергеевич,
группа И981
Руководитель: Лосев Сергей Александрович
2.
Актуальность темыСтабилизатор орудийной установки предназначен для
стабилизации прицеливания оружия при перемещении
(движении, качке) платформы, на которой установлено
орудие. Наличие стабилизатора упрощает процесс
прицеливания при движении платформы и повышает
точность огня с ходу. Стабилизатор орудийной
установки широко распространён в современной
бронетехнике и корабельной артиллерии, являясь
составной частью системы управления огнём этих видов
вооружения.
2
3.
Цели и задачи– анализ прототипов и уточнение технического задания
– разработка структурной схемы,
– выбор элементной базы.
3
4.
Анализ прототипов: Стабилизаторвооружения «Лев»
«Лев» предназначается для стабилизированного наведения в
двух плоскостях танковой пушки и спаренного с ней пулемета и
обеспечения прицельного огня с места и на ходу всеми типами
снарядов в реальных условиях эксплуатации. Используется в
качестве системы стабилизации и наведения вооружения
танков Т-84, Т-72, Т-64.
4
5.
Анализ прототипов: Стабилизаторвооружения 2Э36-3
Стабилизатор вооружения 2Э36-3 предназначен для
наведения
и
стабилизации
автоматической
пушки
калибра 30 мм и спаренного с ней пулемета калибра 7,62
мм (спаренной установки) в вертикальной плоскости и
башни в горизонтальной плоскости при ведении
стрельбы с места и с ходу по наземным и воздушным
целям.
Стабилизатор
обеспечивает
вооружения
вооружения
2Э36-3
полуавтоматическое
в
горизонтальной
и
также
наведение
вертикальной
плоскости.
5
6.
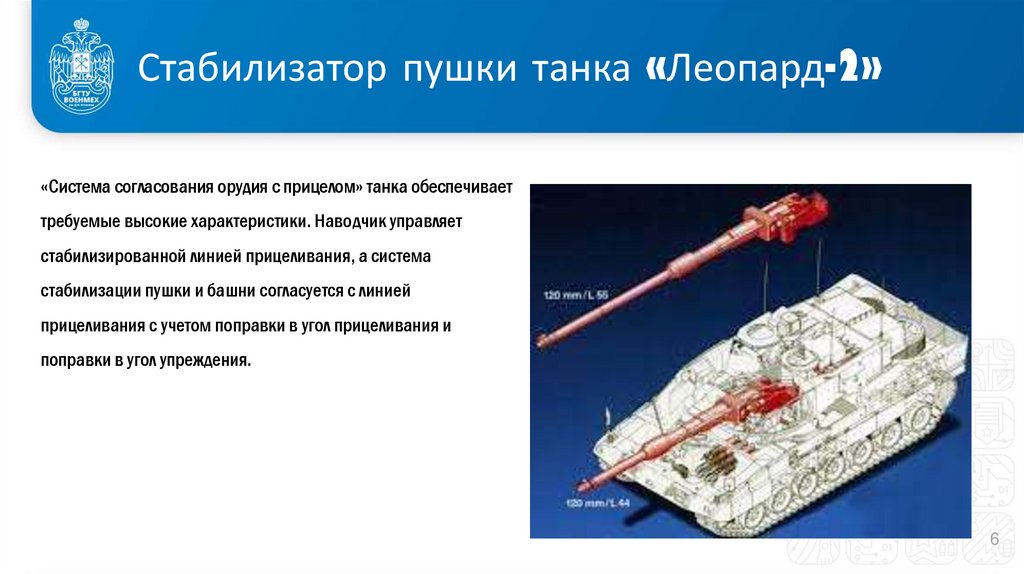
Стабилизатор пушки танка «Леопард-2»«Система согласования орудия с прицелом» танка обеспечивает
требуемые высокие характеристики. Наводчик управляет
стабилизированной линией прицеливания, а система
стабилизации пушки и башни согласуется с линией
прицеливания с учетом поправки в угол прицеливания и
поправки в угол упреждения.
6
7.
Стабилизатор пушки танка «Леопард-2»Электродвигатели приводятся в действие с помощью электронного блока управления энергией,
который соединен с 24-вольтовым источником питания. Функции управления и переключения всех
режимов реализованы в электрическом блоке стабилизации.
Датчиками стабилизации являются гироскопы с двумя степенями свободы, два– на пушке и один для
определения направления перемещения башни – в башне.
Электронный блок управления состоит из трех контуров управления, один для включения
электродвигателя, другой – для определения угловой скорости и третий – для согласования положений.
Если блок управления вышел из строя, то для перемещения пушки и башни необходимо использовать
аварийный контур
7
8.
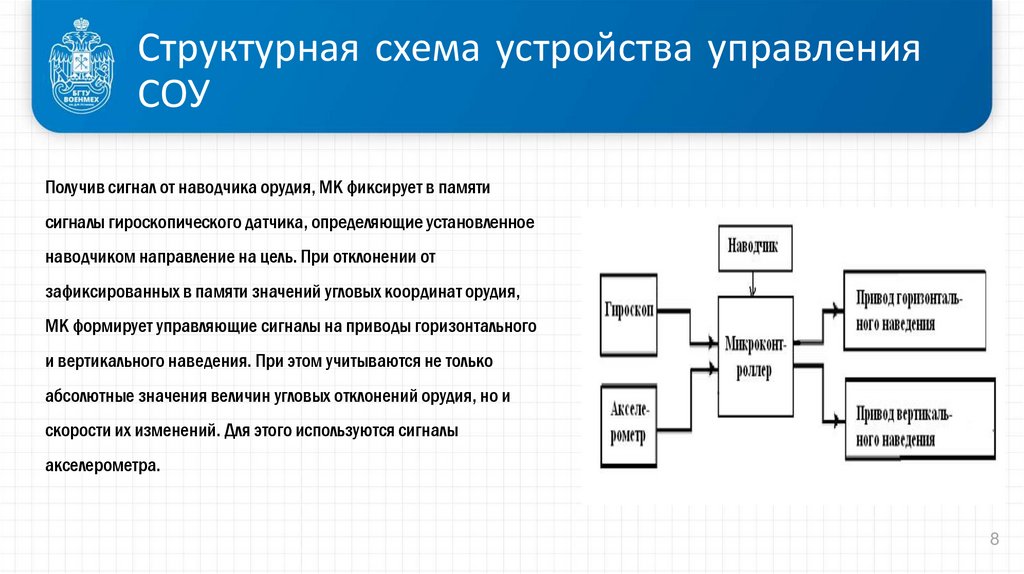
Структурная схема устройства управленияСОУ
Получив сигнал от наводчика орудия, МК фиксирует в памяти
сигналы гироскопического датчика, определяющие установленное
наводчиком направление на цель. При отклонении от
зафиксированных в памяти значений угловых координат орудия,
МК формирует управляющие сигналы на приводы горизонтального
и вертикального наведения. При этом учитываются не только
абсолютные значения величин угловых отклонений орудия, но и
скорости их изменений. Для этого используются сигналы
акселерометра.
8
9.
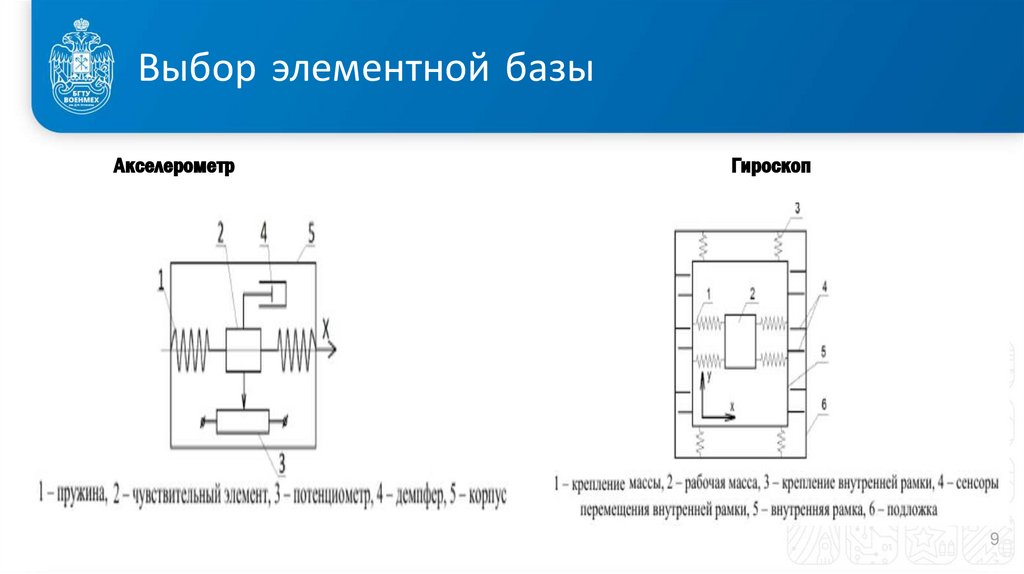
Выбор элементной базыАкселерометр
Гироскоп
9
10.
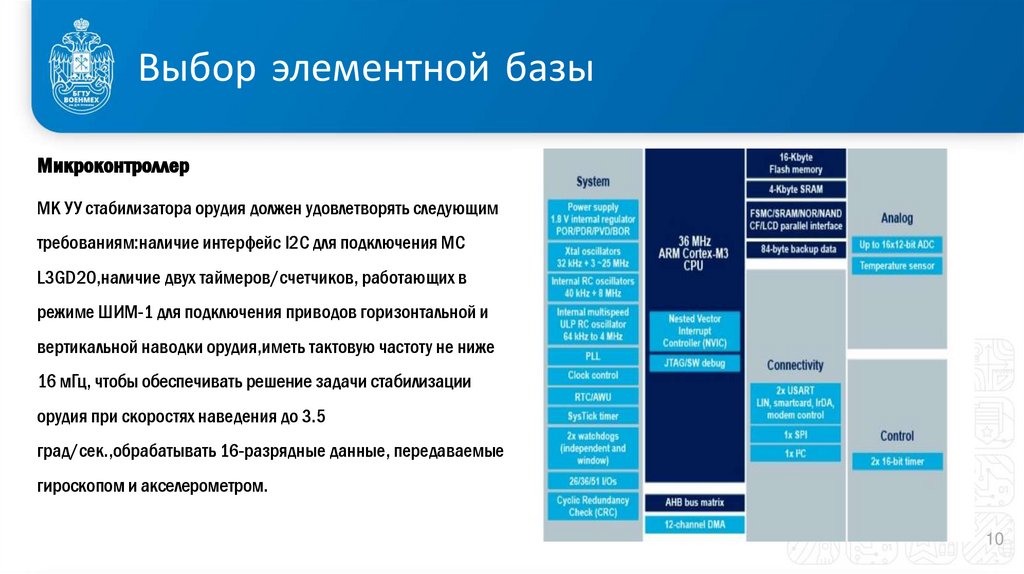
Выбор элементной базыМикроконтроллер
МК УУ стабилизатора орудия должен удовлетворять следующим
требованиям:наличие интерфейс I2C для подключения МС
L3GD20,наличие двух таймеров/счетчиков, работающих в
режиме ШИМ-1 для подключения приводов горизонтальной и
вертикальной наводки орудия,иметь тактовую частоту не ниже
16 мГц, чтобы обеспечивать решение задачи стабилизации
орудия при скоростях наведения до 3.5
град/сек.,обрабатывать 16-разрядные данные, передаваемые
гироскопом и акселерометром.
10
11.
ЗАКЛЮЧЕНИЕВ ходе выполнения учебной практики были получены следующие основные результаты:
- на основе анализа прототипов были сформулированы требования к составу аппаратных средств УУ СОУ и построена
функциональная спецификация, в которой перечислены входы, выходы и функции проектируемого УУ,
- разработана функциональная схема, включающая в себя перечень датчиков и исполнительных модулей УУ СОУ,
- произведен выбор аппаратных средств для построения УУ.
11