



























 physics
physicsSimilar presentations:










Механическое движение
1.
ЛЕКЦИИ ПРЕЗЕНТАЦИИПО ДИСЦИПЛИНЕ «ФИЗИКА»
РАЗДЕЛ «МЕХАНИКА»
2.
Введение.Механическое движение.
3.
Физические законы устанавливаются ипроверяются экспериментально путем
накопления и сопоставления опытных
данных, представляемых набором чисел,
формулируются законы языком математики,
т.е. с помощью формул, связывающих
функциональной зависимостью числовые
значения физических величин. Поэтому,
физика - наука экспериментальная,
физика - наука количественная.
4.
Физи́ческая величина́ — свойствоматериального объекта или явления.
Физические величины объектов — масса,
объём, плотность, удельное электрическое
сопротивление.
Физические величины явлений — сила тока,
напряжённость магнитного поля, сила
тяжести.
Задачей физического эксперимента
является определение числового значения
измеряемых физических величин с заданной
точностью. Эта задача решается с помощью
прямых или косвенных измерений.
5.
При прямом измерении осуществляетсяколичественное сравнение физической
величины с соответствующим эталоном при
помощи измерительных приборов.
При косвенных измерениях интересующая нас
физическая величина находится при помощи
математических операций над непосредственно
измеренными физическими величинами (по
формулам).
При измерении любой физической величины
принципиально невозможно определить ее
истинное значение. Разность между
измеренным и истинным значениями
физической величины называется
погрешностью (ошибкой) измерения.
6.
Погрешности измерений могут быть связаныс техническими трудностями
(несовершенство измерительных приборов,
ограниченные возможности зрительного
аппарата человека, с помощью которого во
многих случаях регистрируются показания
приборов, и т.д.), а также с целым рядом
факторов, которые трудно или невозможно
учесть (колебания температуры воздуха,
движение потоков воздуха вблизи
измерительного прибора, вибрации
измерительного прибора вместе с
лабораторным столом и т.п.).
7.
Различают абсолютную (∆X) и относительную(δ) погрешности измерений.
Абсолютная погрешность измерения – это
погрешность средства измерений, выраженная
в единицах измеряемой физической величины,
характеризующая абсолютное отклонение
измеряемой величины от действительного
значения физической величины: ∆X = X – XД.
Относительная погрешность измерения – это
погрешность измерения, выраженная
отношением абсолютной погрешности
измерения к действительному значению
измеряемой величины. Обычно относительную
погрешность выражают в процентах:
δ = (∆X / Xд) * 100%.
8.
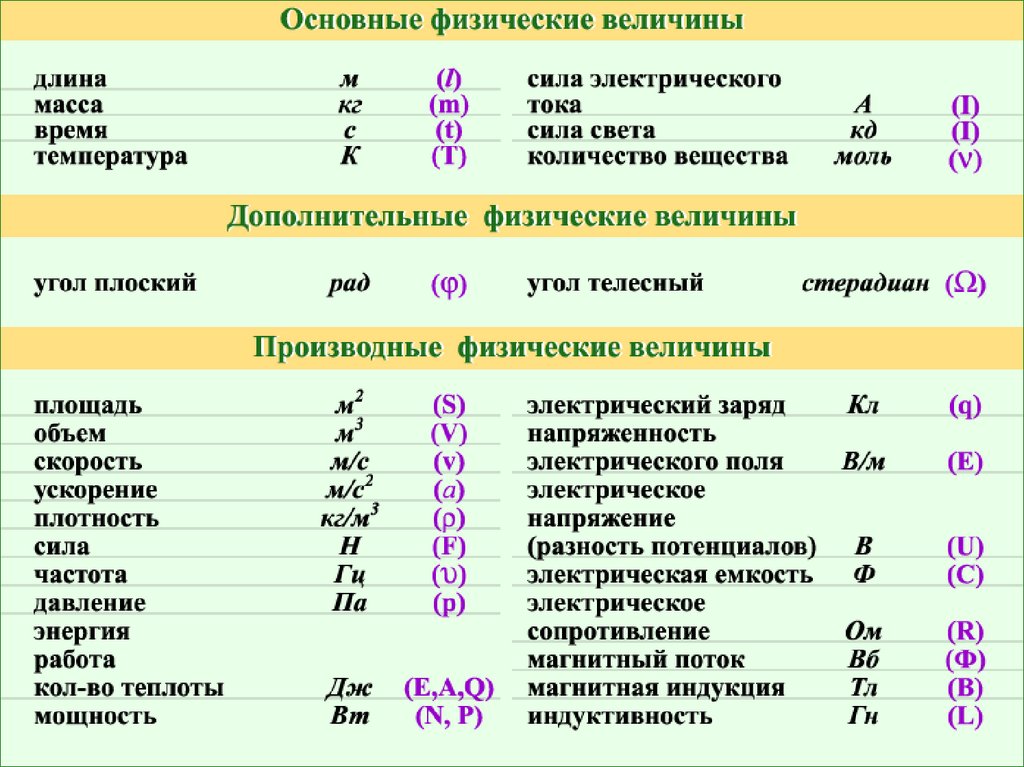
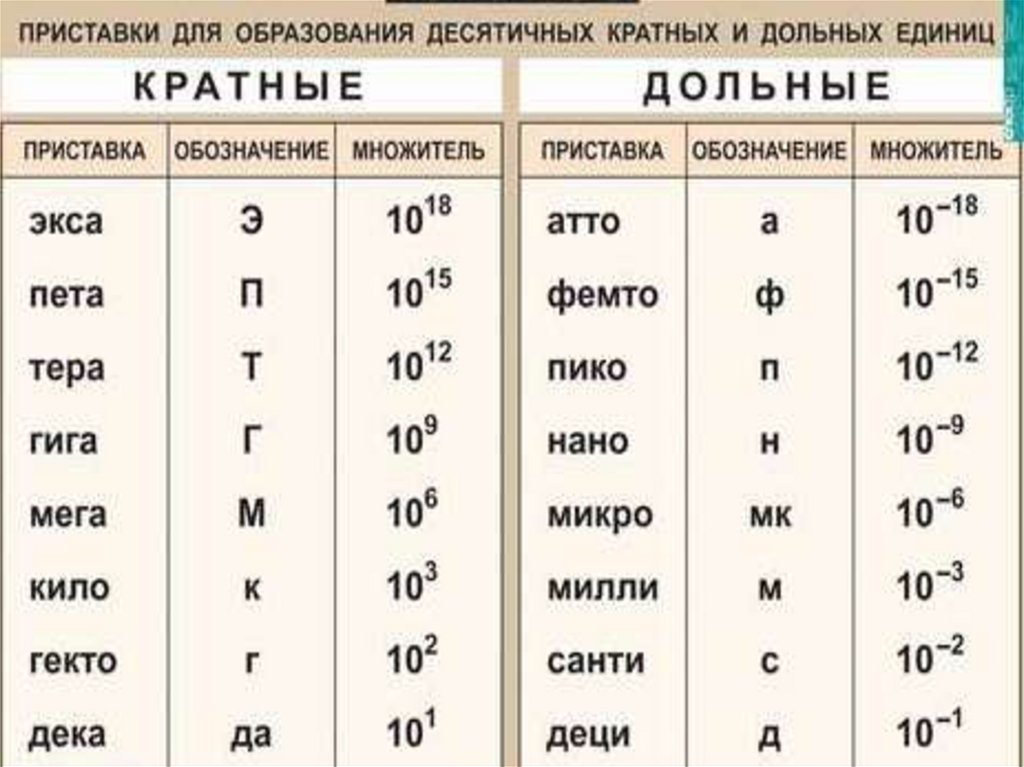
МЕЖДУНАРОДНАЯ СИСТЕМА ЕДИНИЦ СИ9.
10.
11.
Механика изучает различные механическиедвижения тел, и причины их вызывающие.
Механику подразделяют на кинематику,
динамику и статику.
12.
Механическим движением тела называетсяперемещение данного тела относительно
других тел, принятых нами за неподвижные.
Относительность
—
зависимость
механического движения тела от системы
отсчёта.
Система отсчета представляет собой
совокупность
системы
координат
для
определения
положения
тела
в
пространстве и часов для определения
времени.
13.
Виды систем отсчёта: неподвижная,подвижная, инерциальная, неинерциальная.
Системы отсчета, в которых выполняется
закон инерции, стали
называть инерциальные системы
отсчета (ИСО).
Системы, которые вращаются или
ускоряются, неинерциальные.
Принцип относительности: механические
законы физики должны быть одинаковыми
во всех ИСО при одинаковых начальных
условиях.
14.
Принцип относительности Галилея исходитиз некоторых допущений, которые
опираются на наш повседневный опыт.
В классической
механике пространство и время считаются
абсолютными. Предполагается, что длина
тел одинакова в любой системе отсчета и
что время в различных системах отсчета
течет одинаково. Предполагается,
что масса тела, а также все
силы остаются неизменными при
переходе из одной ИСО в другую.
15.
Принцип относительности Галилея: всеинерциальные системы отсчета
равноправны; ход времени, масса,
ускорение и сила в них записываются
одинаково.
Не существует эксперимента, с помощью
которого можно было бы установить, какая
система отсчета действительно покоится, а
какая движется.
Нет систем отсчета в состоянии абсолютного
покоя.
16.
Не указав систему отсчёта, не имеет смыслаговорить о движении.
Механическое движение можно наблюдать
только относительно других тел.
Обнаружить изменение положения тела,
если не с чем сравнивать невозможно.
В различных системах отсчета физические
величины
(скорость,
ускорение,
перемещение,
характер
движения,
траектория
движения
и
т.д.),
характеризующие движение одного и того же
тела, могут быть различными.
17.
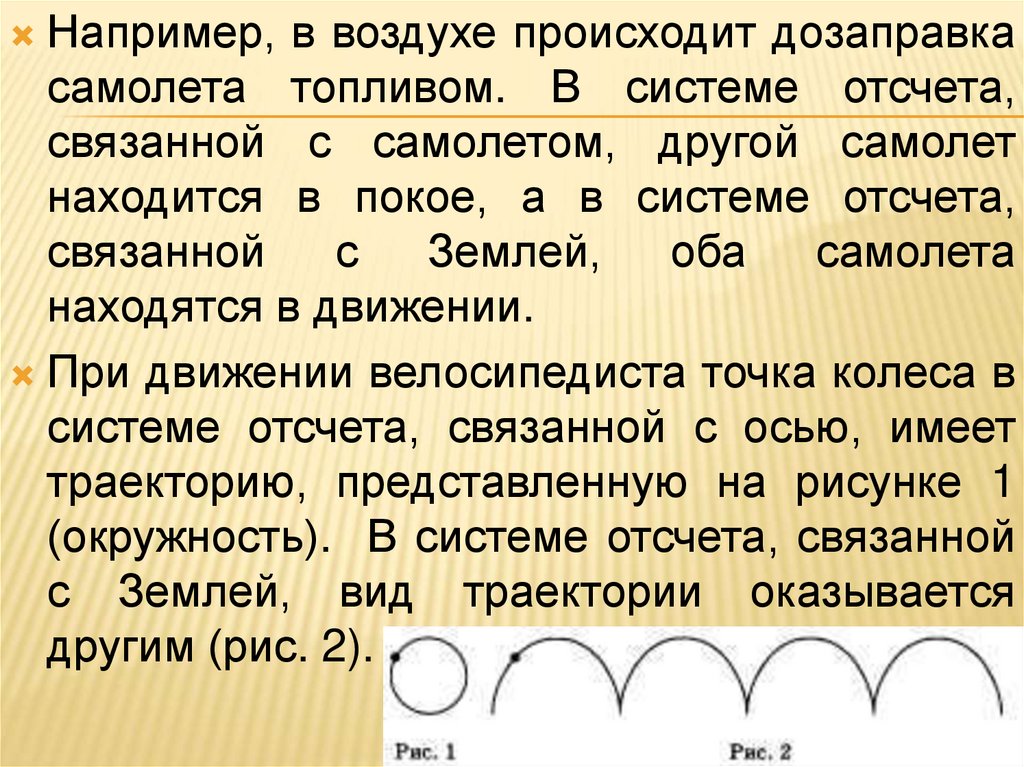
Например, в воздухе происходит дозаправкасамолета топливом. В системе отсчета,
связанной с самолетом, другой самолет
находится в покое, а в системе отсчета,
связанной
с
Землей,
оба
самолета
находятся в движении.
При движении велосипедиста точка колеса в
системе отсчета, связанной с осью, имеет
траекторию, представленную на рисунке 1
(окружность). В системе отсчета, связанной
с Землей, вид траектории оказывается
другим (рис. 2).
18.
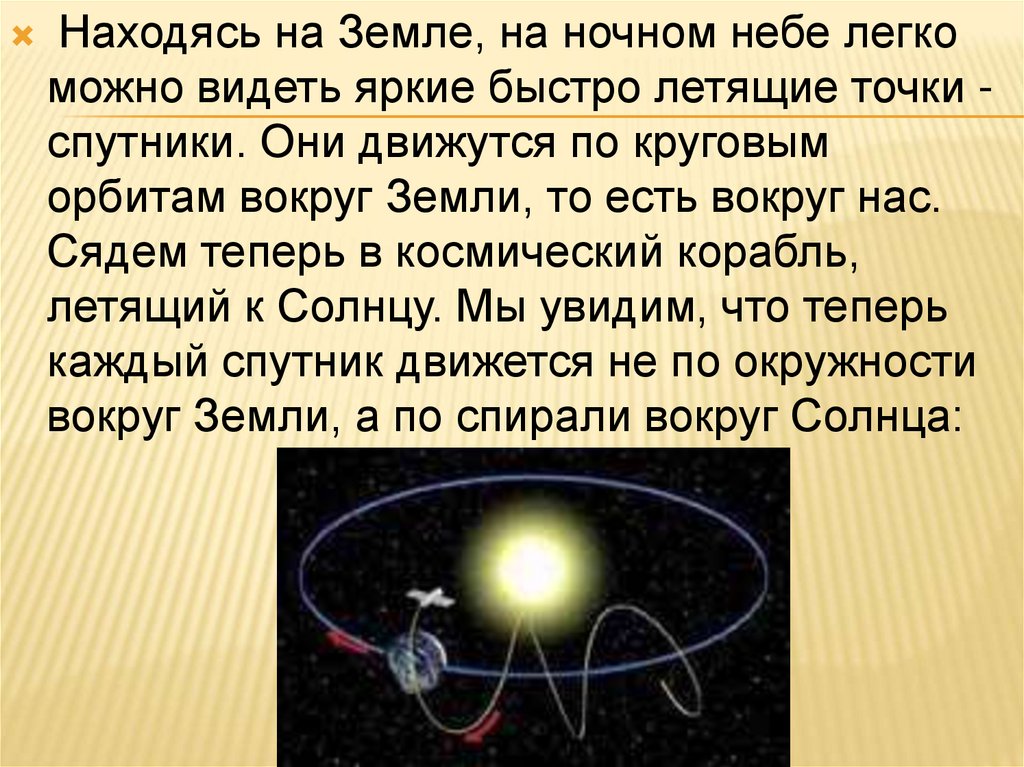
Находясь на Земле, на ночном небе легкоможно видеть яркие быстро летящие точки спутники. Они движутся по круговым
орбитам вокруг Земли, то есть вокруг нас.
Сядем теперь в космический корабль,
летящий к Солнцу. Мы увидим, что теперь
каждый спутник движется не по окружности
вокруг Земли, а по спирали вокруг Солнца:
19.
В системе отсчета, связанной с Землей, тоесть, с точки зрения наземного наблюдателя
груз, сброшенный с самолета, летит по
некоторой криволинейной траектории. А в
системе отсчета, связанной с самолетом,
наблюдатель, то есть летчик, увидит, что груз
падает по прямой.
Лодка пересекает реку перпендикулярно
течению реки двигаясь с некоторой
скоростью относительно воды. За
движением лодки следят 2 наблюдателя:
один неподвижный на берегу, другой на
плоту, плывущем по течению. Относительно
воды плот неподвижен, а по отношению к
берегу он движется со скоростью течения.
20.
С каждым наблюдателем свяжем системукоординат.
X0Y – неподвижная система координат.
X’0’Y’ – подвижная система координат.
21.
S – перемещение лодки относительнонеподвижной СО
S1 – перемещение лодки относительно
подвижной СО
S2 – перемещение подвижной системы
отсчета относительно неподвижной СО.
По закону сложения векторов
S = S1 + S2
Скорость получим разделив S на t:
ט = ט1+ ט2
–טскорость тела относительно неподвижной
СО
22.
ט1 – скорость тела относительно подвижнойСО
ט2 – скорость подвижной системы отсчета
относительно неподвижной СО
Эта формула выражает классический
закон сложения скоростей: скорость тела
относительно неподвижной СО равна
геометрической сумме скорости тела
относительно подвижной СО и скорости
подвижной СО относительно неподвижной
СО.
В скалярном виде формула будет иметь
вид:
23.
Специальная, или частная теорияотносительности — это теория
структуры пространства-времени. Впервые
была представлена в 1905 году Альбертом
Эйнштейном в работе «К электродинамике
движущихся тел». Теория описывает
движение, законы механики, а также
пространственно-временные отношения,
определяющие их, при
любых скоростях движения, в том числе и
близких к скорости света. Классическая
механика Ньютона в рамках специальной
теории относительности является
приближением для малых скоростей.
24.
Эйнштейн изменил фундаментальныевзгляды на время и пространство. Согласно
теории относительности, время необходимо
воспринимать как почти равноправную
составляющую (координату) пространствавремени, которая может участвовать в
преобразованиях координат при изменении
системы отсчета вместе с обычными
пространственными координатами, подобно
тому, как преобразуются все три
пространственные координаты при повороте
осей обычной трехмерной системы
координат.
25.
Теория относительности значительнорасширила понимание физики в целом, а
также существенно углубила знания в
области физики элементарных частиц.
С помощью данной теории космология и
астрофизика сумели предсказать такие
необычные явления, как нейтронные
звезды, черные дыры и гравитационные
волны.
26.
Путь, перемещение, скорость.Равномерное прямолинейное движение.
Ускорение. Равнопеременное
прямолинейное движение.
27.
КИНЕМАТИКАКинематика
изучает движение тел в
пространстве без выяснения причин этого
движения.
По
форме
траектории
движения
разделяются
на
прямолинейные
и
криволинейные.
Прямолинейным
называется движение,
траекторией которого является прямая
линия.
Криволинейным
называется движение,
траекторией которого является кривая
линия.
28.
Траекториейназывается линия, которую
описывает тело (материальная точка) при
своем движении.
Под
материальной точкой в механике
понимают
тело,
обладающее
массой,
размерами
которого
можно
пренебречь.
Расстояние, измеряемое вдоль траектории,
называется путем. Единица пути — метр.
Путь является скалярной величиной, так как он
не указывает направления движения.
Путь определяется по формуле
S = טt,
где
– טскорость,
t – время.
29.
Путь не всегда может указывать положениетела.
Перемещением тела называется отрезок
прямой, направленный от начального
положения тела в его последующие
положения. Единица перемещения — метр.
Перемещение
величина
векторная,
определяемая по формуле
S = טt,
где
– טвектор скорости.
30.
РАВНОМЕРНОЕ ДВИЖЕНИЕДвижение, при котором за любые равные
промежутки времени тело проходит
одинаковые отрезки пути, называется
равномерным.
Формула пути равномерного движения
S=טt
Скорость
–
это
величина,
характеризующая движение и измеряемая
отношением пути ко времени, за которое
пройден этот путь:
S
=ט
t
31.
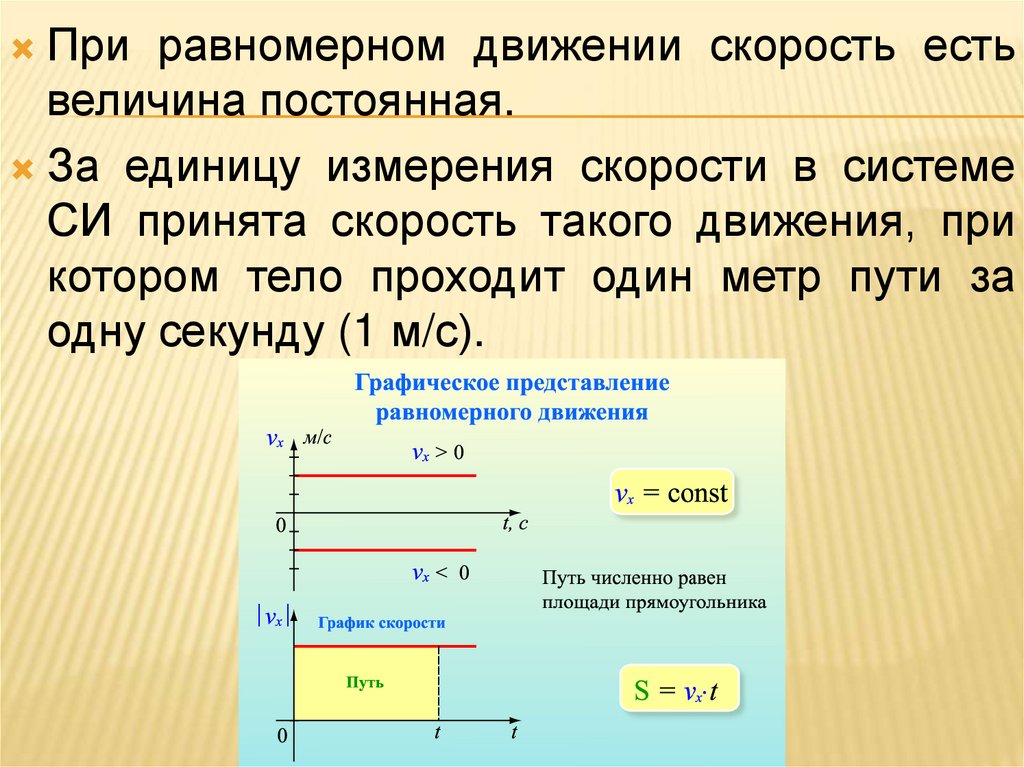
Приравномерном движении скорость есть
величина постоянная.
За единицу измерения скорости в системе
СИ принята скорость такого движения, при
котором тело проходит один метр пути за
одну секунду (1 м/с).
32.
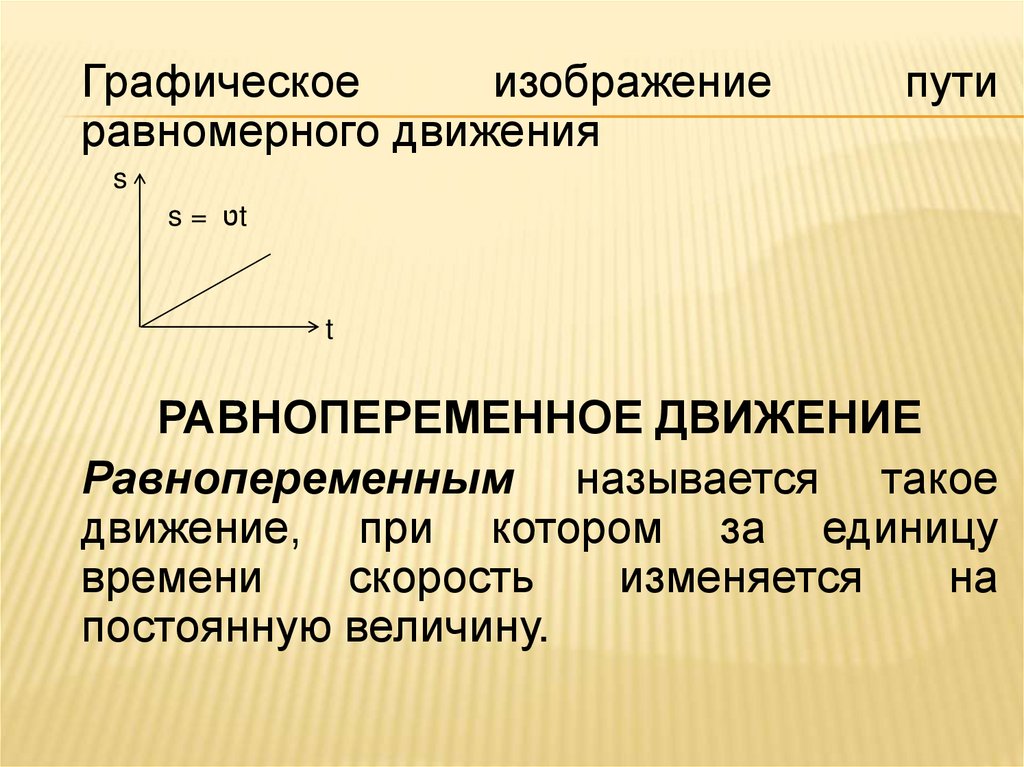
Графическоеизображение
равномерного движения
пути
s
s = טt
t
РАВНОПЕРЕМЕННОЕ ДВИЖЕНИЕ
Равнопеременным называется такое
движение, при котором за единицу
времени
скорость
изменяется
на
постоянную величину.
33.
Величина, характеризующая изменениескорости за единицу времени, называется
ускорением.
(ט – טо )
а=
,
t
где
– טконечная скорость;
טо – начальная скорость;
t – время, за которое произошло данное
изменение скорости.
Ускорение и скорость являются векторными
величинами.
34.
Если скорость равнопеременного движениявозрастает,
движение
называется
равноускоренным.
Если скорость равнопеременного движения
уменьшается,
движение
называется
равнозамедленным.
За
единицу измерения в системе СИ
принято такое ускорение, при котором
скорость изменяется на один метр в
секунду за секунду (1 м/с2).
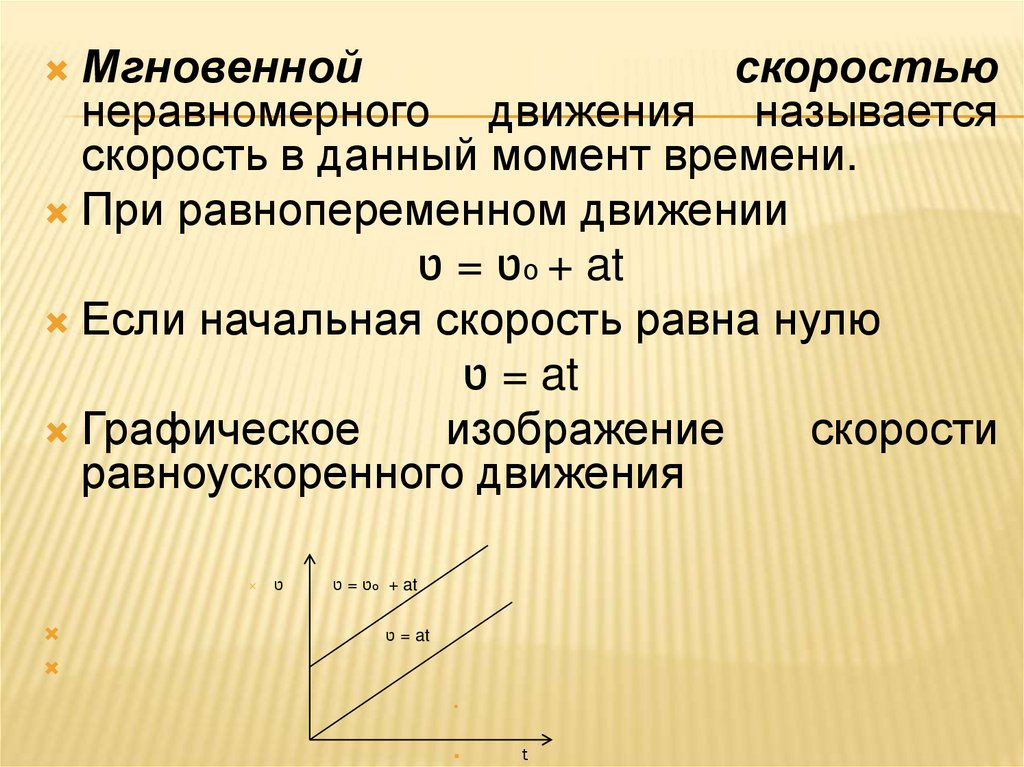
35.
Мгновеннойскоростью
неравномерного движения называется
скорость в данный момент времени.
При равнопеременном движении
ט = טо + at
Если начальная скорость равна нулю
= טat
Графическое
изображение
скорости
равноускоренного движения
ט
ט = טо + at
= טat
t
36.
Среднейскоростью неравномерного
движения называется скорость такого
равномерного движения, при котором тело
проходит такой же путь и за такое же
время, как при данном неравномерном
движении
s
טср =
t
Для равнопеременного движения средняя
скорость определяется как среднее
арифметическое начальной и конечной
скоростей
(ט0+ )ט
טср =
2
37.
или, подставивט = טо + at
аt
טср = טо +
2
Путь
равнопеременного движения
начальной скоростью:
S = טср t,
или
аt2
S =טо t +
2
Если начальная скорость равна нулю
аt2
S=
2
с
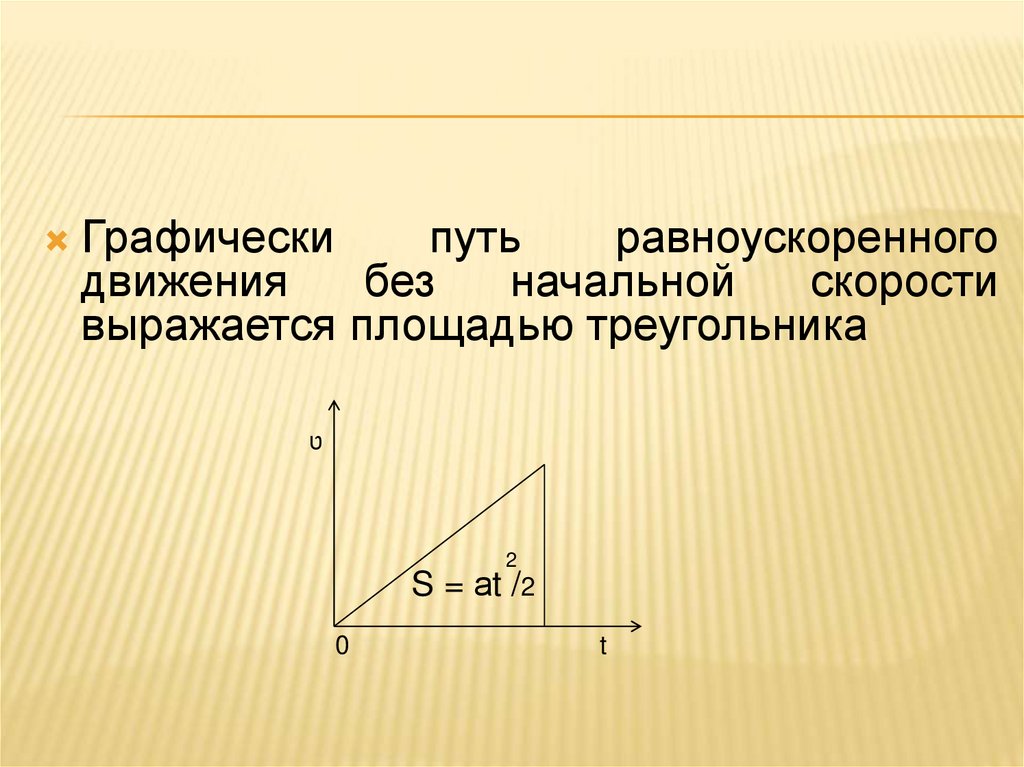
38.
Графическипуть
равноускоренного
движения
без
начальной
скорости
выражается площадью треугольника
ט
2
S = аt /2
0
t
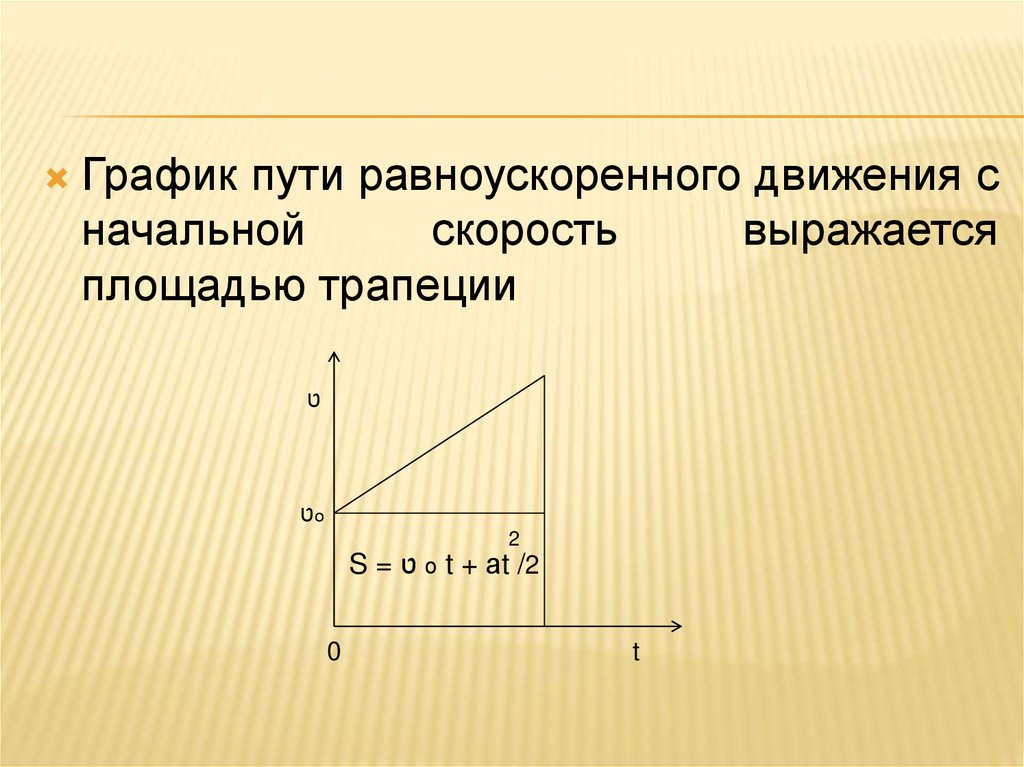
39.
График пути равноускоренного движения сначальной
скорость
площадью трапеции
выражается
ט
טо
2
S = טо t + аt /2
0
t
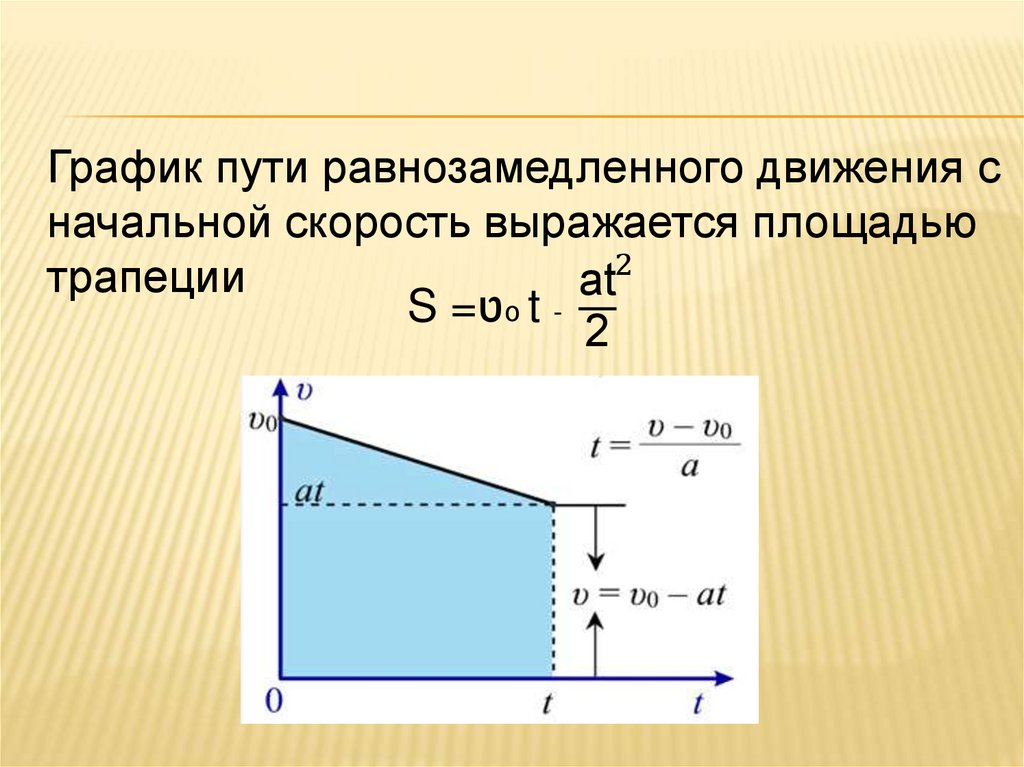
40.
График пути равнозамедленного движения сначальной скорость выражается площадью
2
трапеции
аt
S =טо t 2
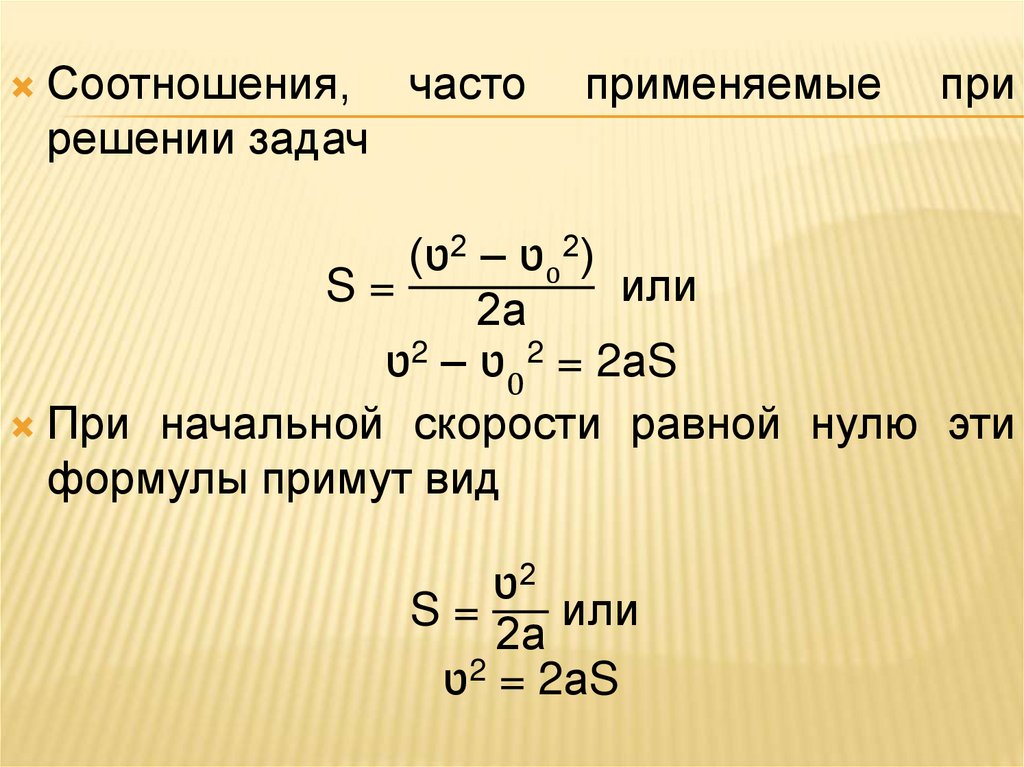
41.
Соотношения,часто
применяемые
при
решении задач
(ט2 – ט02)
S=
или
2а
ט2 – ט0 2 = 2аS
При начальной скорости равной нулю эти
формулы примут вид
ט2
S=
или
2а
ט2 = 2аS
42.
43.
Свободное падение тел. Движение тела,брошенного под углом к горизонту.
Равномерное движение по окружности
44.
Свободнымпадением
называется
падение тел в безвоздушном пространстве
под действием силы тяжести.
Свободное
падение
является
равноускоренным движением.
Среднее значение ускорения свободного
падения 9,8 м/с2.
45.
Формулы свободного падения телg t2
h =טо t +
,
2
ט = טо + gt,
ט2 – טо2 = 2gh
где
h-высота,
g-ускорение свободного падения,
если начальная скорость равна нулю:
gt2
h=
,
2
= טgt,
ט2 = 2gh
46.
Движение тела в поле тяготения.Если тело брошено горизонтально, то
оно одновременно движется вперед в
горизонтальном направлении по инерции и
падает вниз под действием силы тяжести.
Так как сила тяжести в каждой точке
траектории направлена под углом к вектору
скорости, то тело будет двигаться по кривой,
называемой параболой.
47.
48.
Скорость טтакого сложного движенияскладывается из скорости טх, направленной
горизонтально и скорости טу, направленной
вертикально вниз. Скорость тела в
горизонтальном направлении (без учета
сопротивления воздуха) является
постоянной. Скорость в вертикальном
направлении изменяется под действием
силы тяжести, т.е. является скоростью
свободного падения טу = gt.
49.
Дальность полета тела, брошенногогоризонтально с высоты h,
2h
s = טх t, s = טх
,
g
где t –время свободного падения с высоты h.
Если тело брошено под углом к
горизонту, то скорость ט0 раскладывается
на составляющую в горизонтальном
направлении ט0х и составляющую в
вертикальном направлении ט0у :
ט0х = ט0 cosα и ט0у = ט0 sinα
50.
Скорость тела в горизонтальномнаправлении (без учета сопротивления
воздуха) является постоянной. Скорость в
вертикальном направлении изменяется по
закону
טу = ט0 sin α – gt
Высота подъема тела, брошенного под углом
к горизонту
gt2
h = (ט0 sin α) t –
,
2
где t – время подъема тела.
51.
Максимальной высоты тело достигнет завремя, определяемое из уравнения
טh = 0, ט0 sin α – gt1 = 0,
ט0 sin α
t1 =
,
g
а формула максимальной высоты
max
(טо2 sin2 α)
hmax =
2g
Дальность полета тела, брошенного под углом
к горизонту:
smax =(ט0 cos α) 2t1,
следовательно:
(טо2 sin 2α)
smax =
g
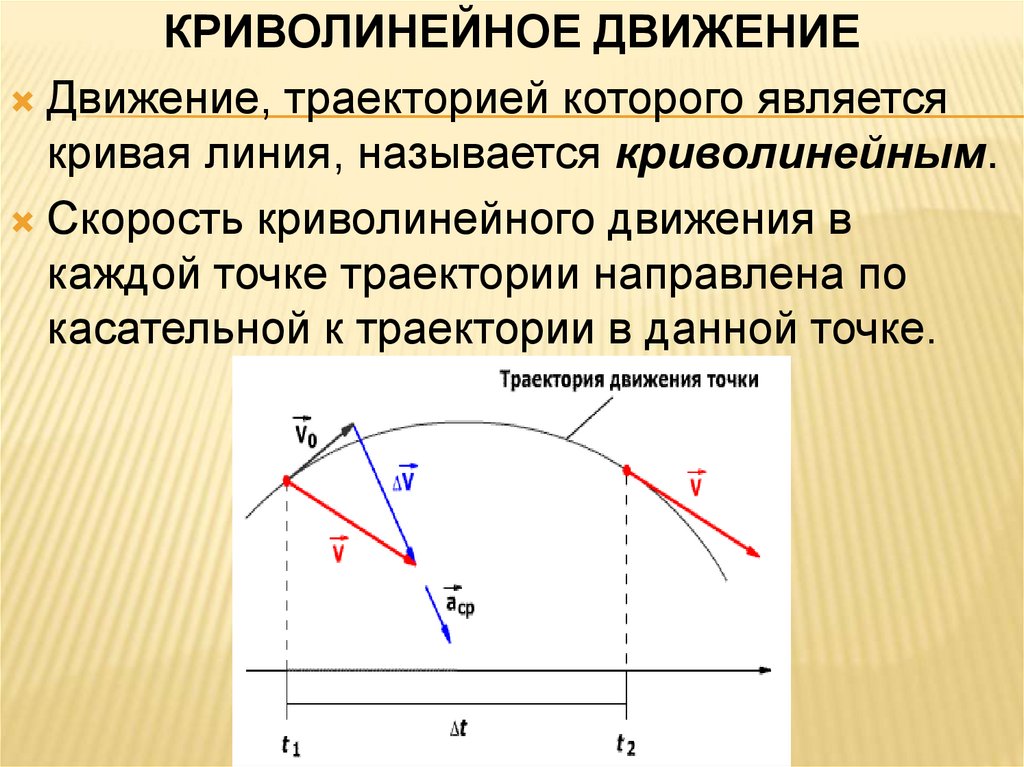
52.
КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕДвижение, траекторией которого является
кривая линия, называется криволинейным.
Скорость криволинейного движения в
каждой точке траектории направлена по
касательной к траектории в данной точке.
53.
Движение тела по окружностиТело движется равномерно по окружности в
том случае, когда сила, действующая на
тело, составляет прямой угол с вектором
скорости.
Силу, вызывающую равномерное движение
тела по окружности, называют
центростремительной, так как она
приложена к телу и направлена по радиусу к
центру окружности (сила тяготения, упругая
сила, сила трения, электромагнитные силы).
54.
55.
Линейной скоростью движения тела поокружности называется скорость перемещения
тела по окружности. Линейная скорость
определяется отношением пути, пройденного
по окружности, ко времени, за которое
совершился данный путь
S
=ט
t
2πr
1
=ט
, или = ט2πfr, т.к. Т =
f
T
где Т – период обращения (время одного
полного оборота) [ Т ] = [ 1с ],
1
f – частота [ f ] = [ ] = [ 1Гц ]
с
56.
Угловой скоростью при равномерномдвижении тела по окружности называется
скорость поворота радиус-вектора,
проведенного из центра окружности к телу,
движущемуся по окружности. Угловая
скорость определяется отношением угла
поворота радиус-вектора по времени, за
которое совершен этот поворот.
α
ω= ,
t
2π
или ω = , ω = 2πf
T
[ω] = [1рад/c]
57.
Линейная и угловая скорости связаны междусобой соотношением: = טωr
При равномерном движении тела по
окружности угловая скорость постоянна, а
линейная постоянна по величине, но
переменна по направлению.
При равномерном движении тела по
окружности существует ускорение, которое
называется центростремительным.
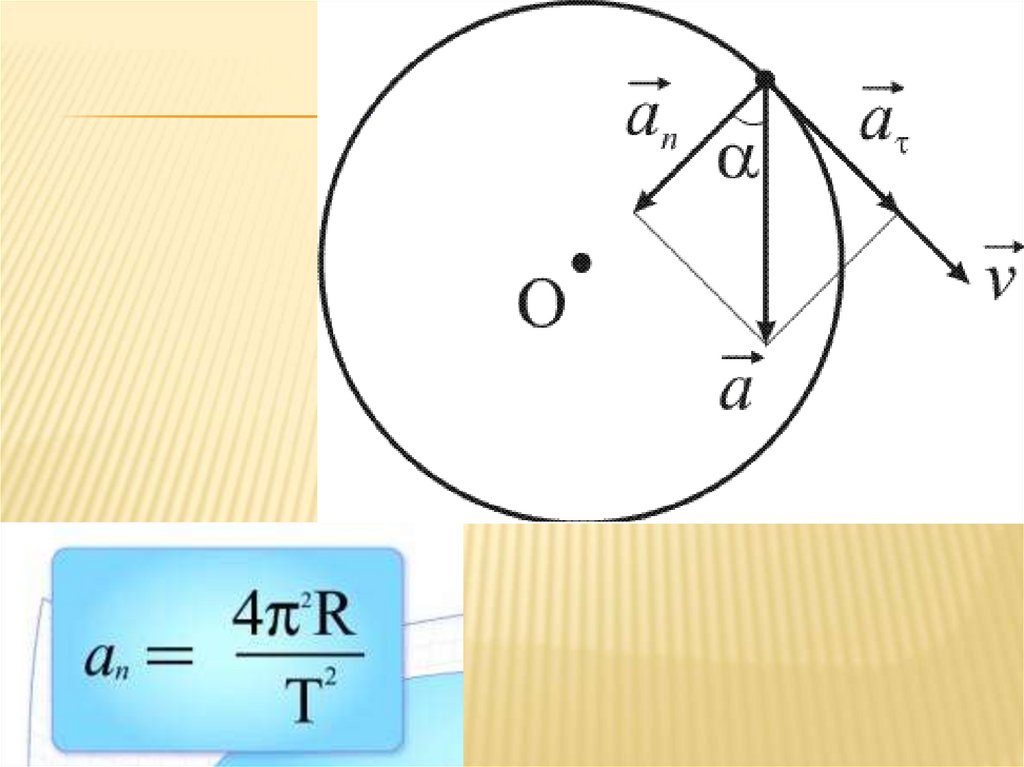
Центростремительное ускорение направлено
по радиусу к центру окружности:
ט2
ац = = ω2r
r
58.
59.
60.
Пе́рвая косми́ческая ско́рость (кругова́яско́рость) — минимальная скорость,
которую необходимо придать объекту, чтобы
вывести его на геоцентрическую орбиту.
Иными словами, первая космическая
скорость — это минимальная скорость, при
которой тело, движущееся горизонтально
над поверхностью планеты, не упадёт на
неё, а будет двигаться по круговой орбите.
Для Земли первая космическая скорость
равна 7,9 км/с.
Для Земли вторая космическая
скорость равна 11,2 км/с. Тело, имеющее
около Земли такую скорость, покидает
окрестности Земли и становится спутником.
61.
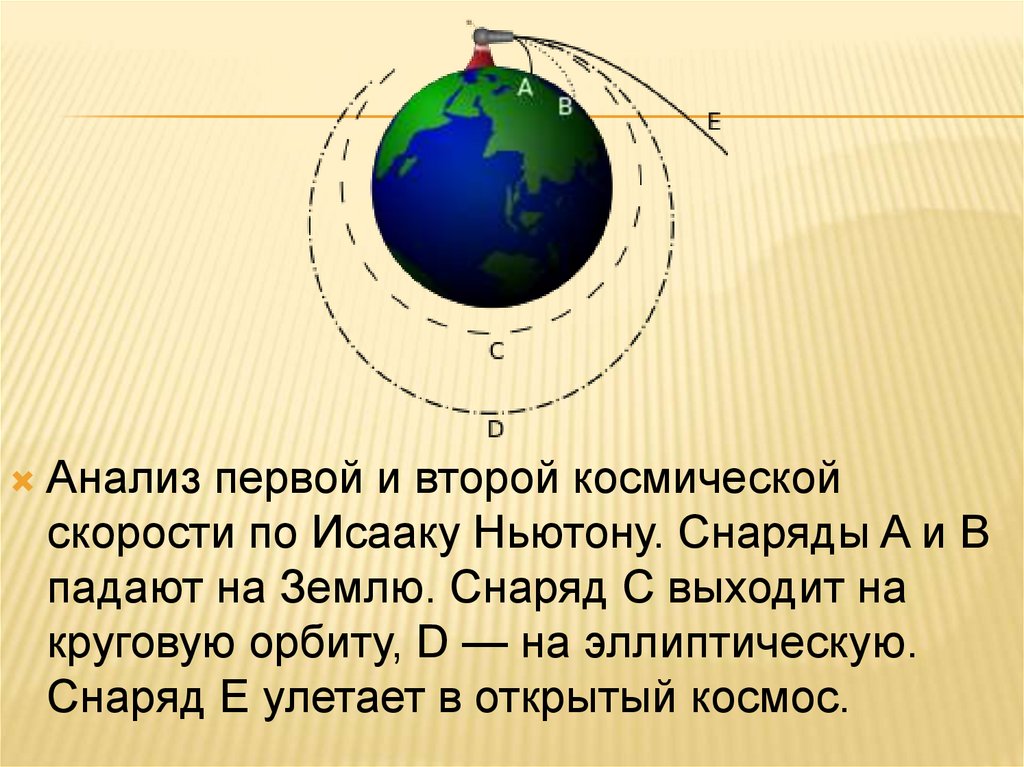
Анализ первой и второй космическойскорости по Исааку Ньютону. Снаряды A и B
падают на Землю. Снаряд C выходит на
круговую орбиту, D — на эллиптическую.
Снаряд E улетает в открытый космос.
62.
Законы Ньютона. Сила. Масса.Способы измерения массы тел.
Сила тяжести. Вес. Невесомость.
63.
Динамика рассматривает движение тел впространстве с изучением причин данного
движения. Причиной изменения состояния
движения (скорости) тел является сила.
Под словом сила в механике понимают
величину взаимодействия между телами и
полями, в результате которого происходит
изменение состояния движения этих тел или
их деформация. Сила – векторная величина,
характеризующаяся численным значением,
направлением и точкой приложения.
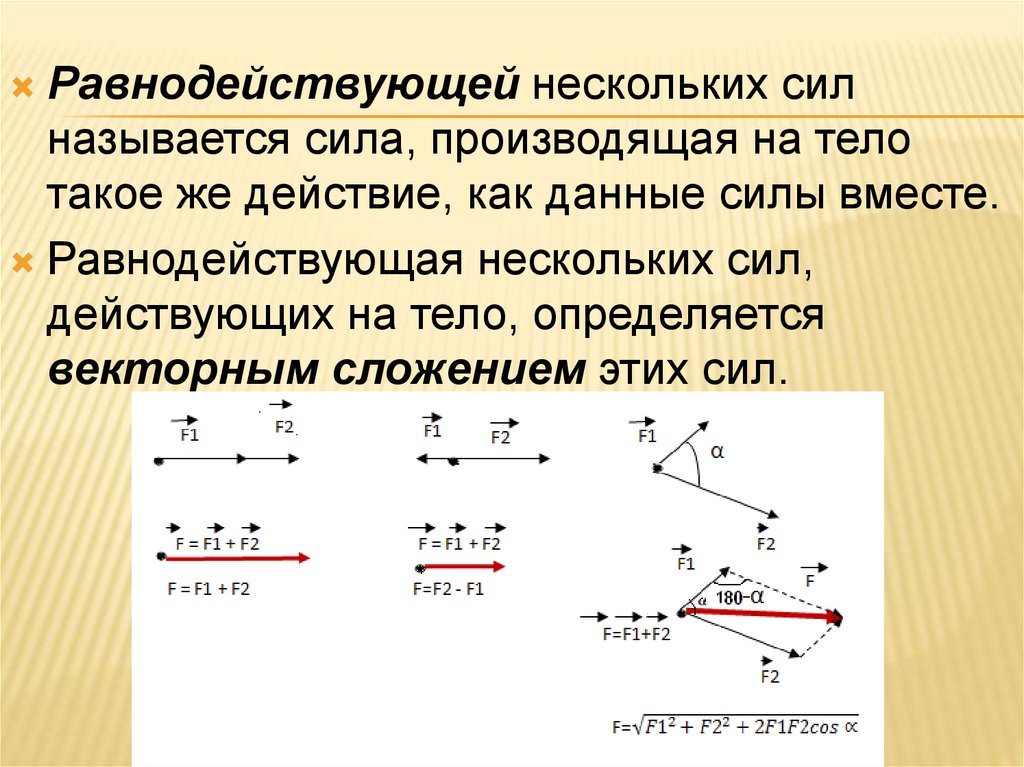
64.
Равнодействующей нескольких силназывается сила, производящая на тело
такое же действие, как данные силы вместе.
Равнодействующая нескольких сил,
действующих на тело, определяется
векторным сложением этих сил.
65.
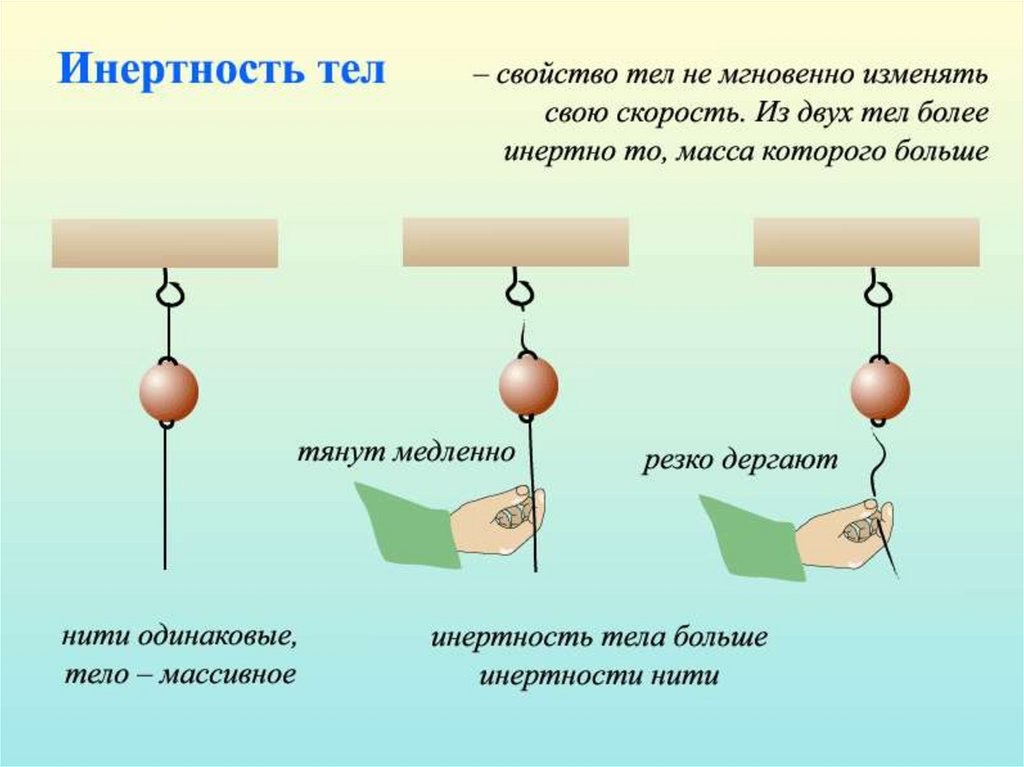
66.
МАССА — МЕРА ИНЕРТНОСТИ.Вследствие инертности тела сохраняют
свою скорость в отсутствие взаимодействия
с другими телами.
Инертность — свойство тела сохранять
состояние покоя или равномерного
прямолинейного движения, когда
действующие на него силы отсутствуют или
взаимно уравновешены.
Масса — это физическая величина,
являющаяся мерой инертности тела при
поступательном движении.
67.
68.
Масса — величина скалярная. Единицамассы — килограмм (кг).
В классической механике, или механике
Ньютона, т. е. когда скорость движения
макротел ϑ много меньше скорости света с
в вакууме (ϑ «Сс), считается, что масса тела
не зависит от скорости его движения.
Масса тела равна сумме масс всех частиц
(или материальных точек), из которых оно
состоит. Масса замкнутой системы тел
остается неизменной при любых процессах,
происходящих в системе.
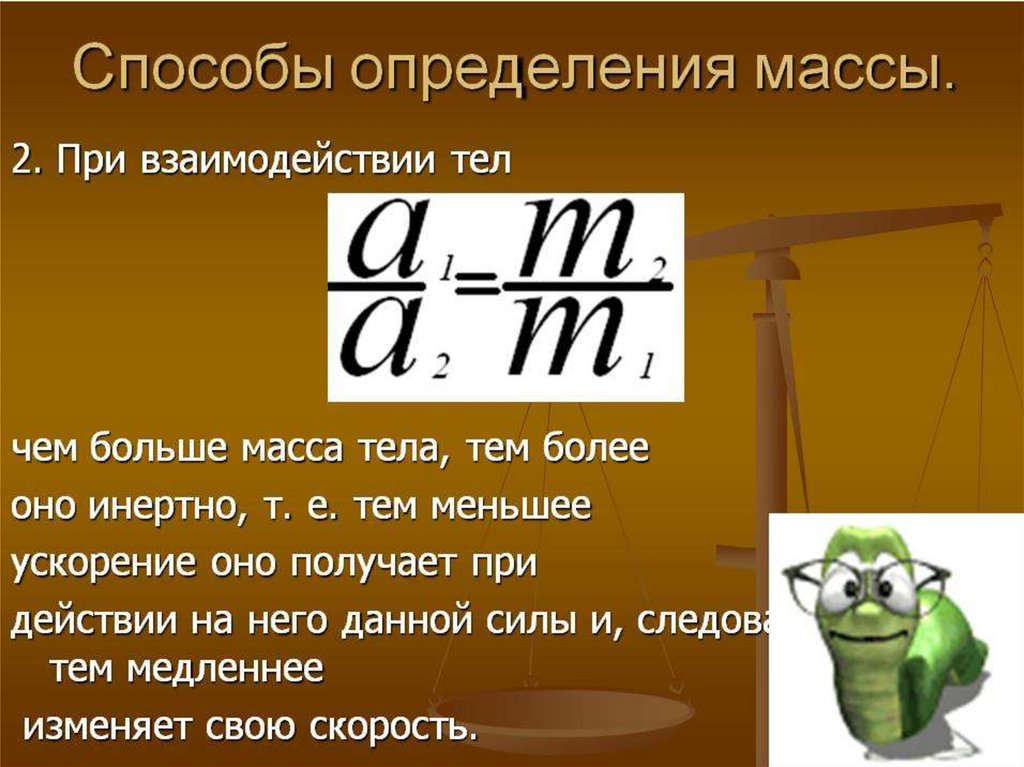
69.
70.
71.
Центр масс — это точка, в которой можетсчитаться сосредоточенной масса тела при
его поступательном движении.
При поступательном движении тела все его
точки движутся с одинаковой скоростью и
описывают параллельные друг другу
траектории. Поэтому можно рассматривать
поступательное движение не всего тела, а
одной точки — его центра масс, т. е.
материальной точки, в которой как бы
сосредоточена, вся масса тела.
72.
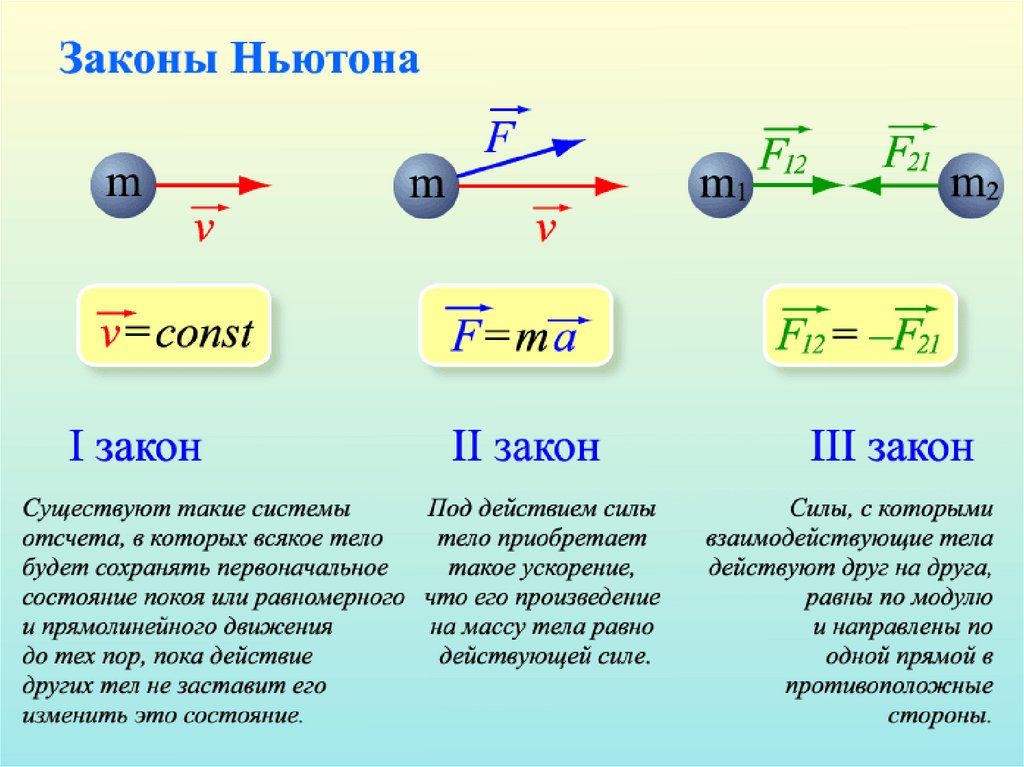
В основу динамики легли три законаНьютона.
Первый закон Ньютона. Всякое тело
сохраняет состояние покоя или
прямолинейного равномерного движения
пока на него не действуют никакие силы
или сумма действующих на него сил равна
нулю.
73.
74.
Первый закон Ньютона выполняется винерциальных системах отсчета.
Инерциальными называются системы
отсчета, которые покоятся или движутся
равномерно и прямолинейно друг
относительно друга.
Второй и третий законы Ньютона
справедливы также только в инерциальных
системах отсчета.
75.
Второй закон Ньютона. Ускорение,сообщаемое телу данной силой
(равнодействующей сил), прямо
пропорционально величине этой силы
(равнодействующей сил) и обратно
пропорционально массе тела:
F
F
а = , или а = , или F = ma,
m
m
где
а – ускорение,
F – действующая сила или
равнодействующая нескольких сил,
m –масса тела.
76.
Ускорение – величина векторная,совпадающая с направлением действующей
силы или результирующей сил.
За единицу измерения силы в системе СИ
принята такая сила, которая телу массой в
м
1 кг сообщает ускорение 1 2. Такая единица
с
силы называется Ньютоном (н).
( ט2 – ט1 )
Так как ускорение а =
, то формула
t
второго закона Ньютона запишется в виде:
m( ט2 – ט1 )
F=
или Ft = m ט2 – m ט1
t
77.
Произведение силы на время ее действияназывается импульсом силы, а
произведение массы движущегося тела на
скорость – количеством движения
(импульсом) тела.
Второй закон Ньютона (вторая
формулировка). Изменение количества
движения тела пропорционально импульсу
силы, действующей на тело.
78.
По второму закону Ньютона при движении телапо любой криволинейной траектории
центростремительная сила, направленная по
радиусу к центру кривизны, равна:
m ט2
F=
= m ω 2r
r
Третий закон Ньютона. Тела действуют
друг на друга с силами равными по
величине и противоположными по
направлению.
79.
80.
81.
СИЛА ТЯЖЕСТИ. ВЕС. НЕВЕСОМОСТЬСила, с которой все тела притягиваются к
земле называется силой тяжести
F = mg , где
F- сила тяжести,
m-масса тела,
g-ускорение свободного падения.
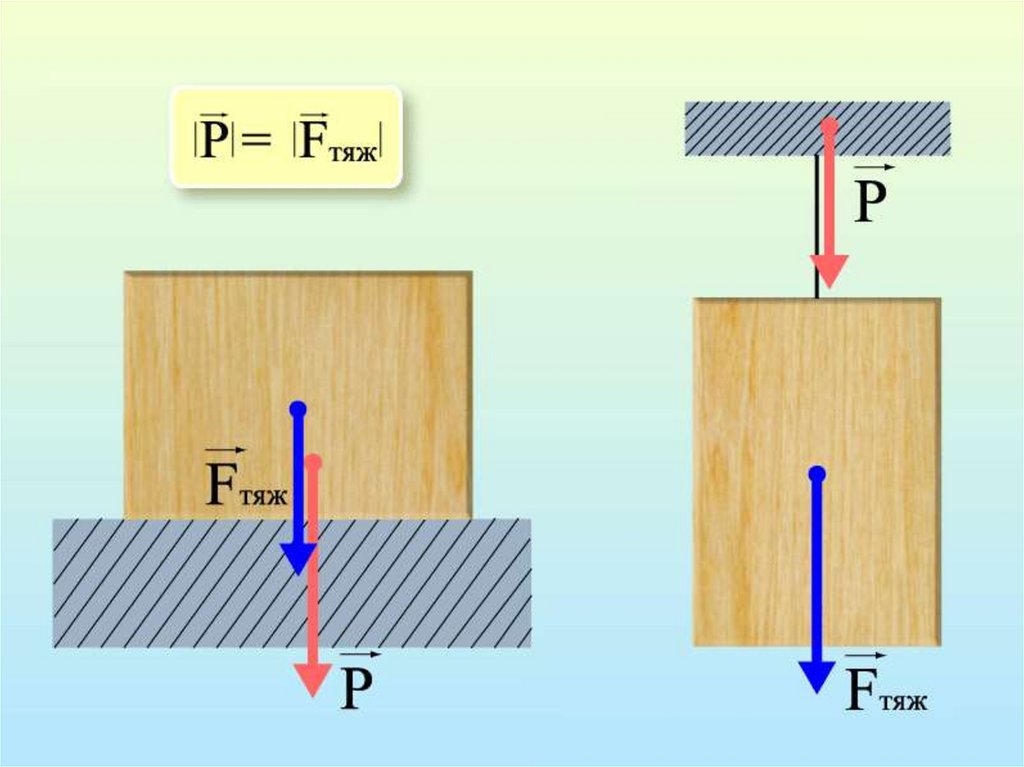
Весом тела называется сила, с которой
притягиваемое Землей тело давит на
горизонтальную опору или растягивает
вертикальный подвес.
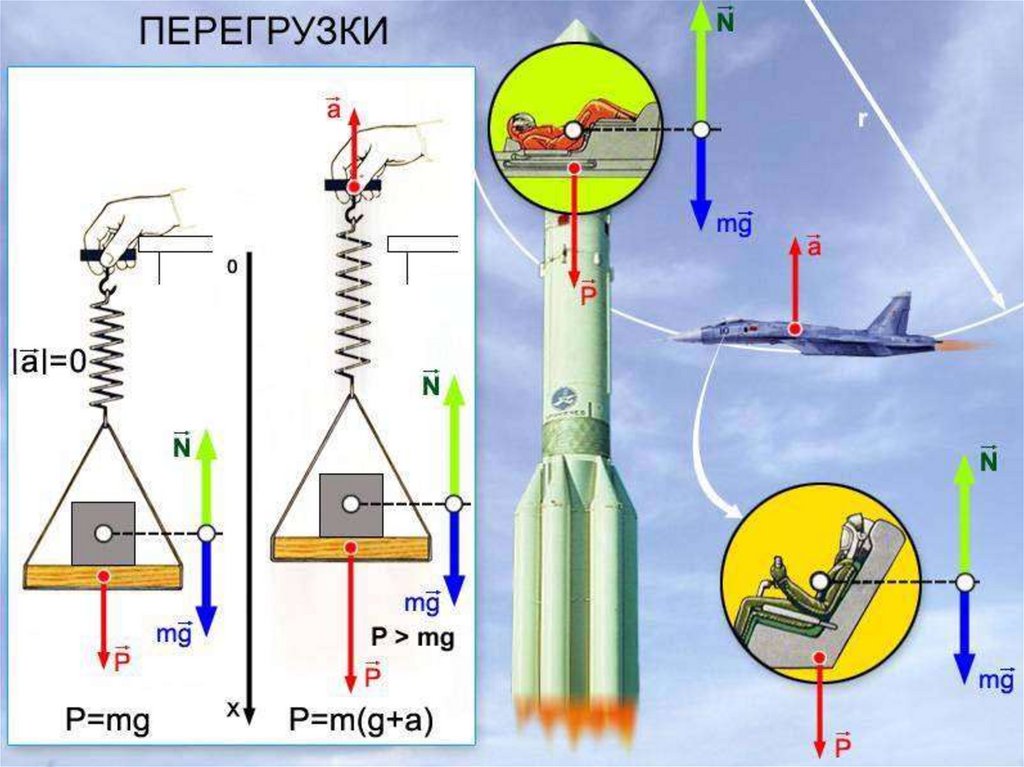
82.
83.
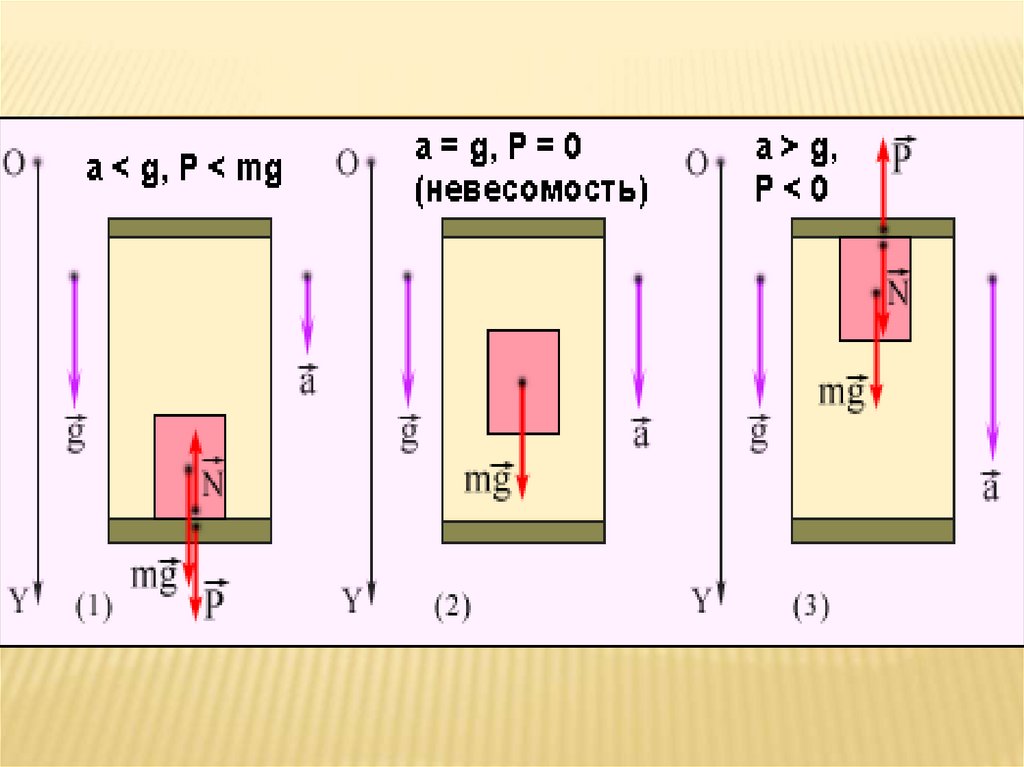
Если тело движется вверх с ускорением а,его вес:
P = m(g+а),
т.е. вес больше силы тяжести.
При движении тела вниз с ускорением а,
его вес
P = m(g-а),
т.е. вес меньше силы тяжести.
Тело испытывает невесомость, если а = g.
84.
85.
86.
Закон всемирного тяготения.Силы в механике.
87.
Законвсемирного тяготения. Два тела
притягиваются друг к другу с силой прямо
пропорциональной произведению их масс и
обратно
пропорциональной
квадрату
расстояния между ними:
m1 m2
F=G
,
2
r
где
r- расстояние между телами,
G – гравитационная постоянная.
G = 6,67 х 10-11 м 3/кг х с2.
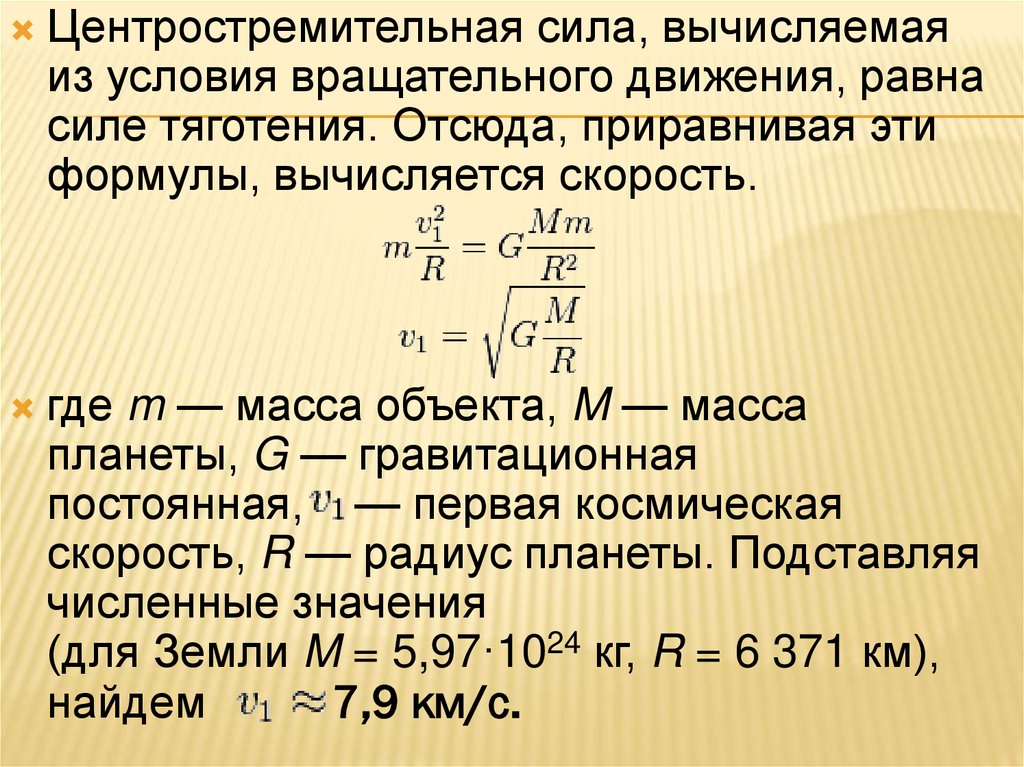
88.
Центростремительная сила, вычисляемаяиз условия вращательного движения, равна
силе тяготения. Отсюда, приравнивая эти
формулы, вычисляется скорость.
где m — масса объекта, M — масса
планеты, G — гравитационная
постоянная, — первая космическая
скорость, R — радиус планеты. Подставляя
численные значения
(для Земли M = 5,97·1024 кг, R = 6 371 км),
найдем
7,9 км/с.
89.
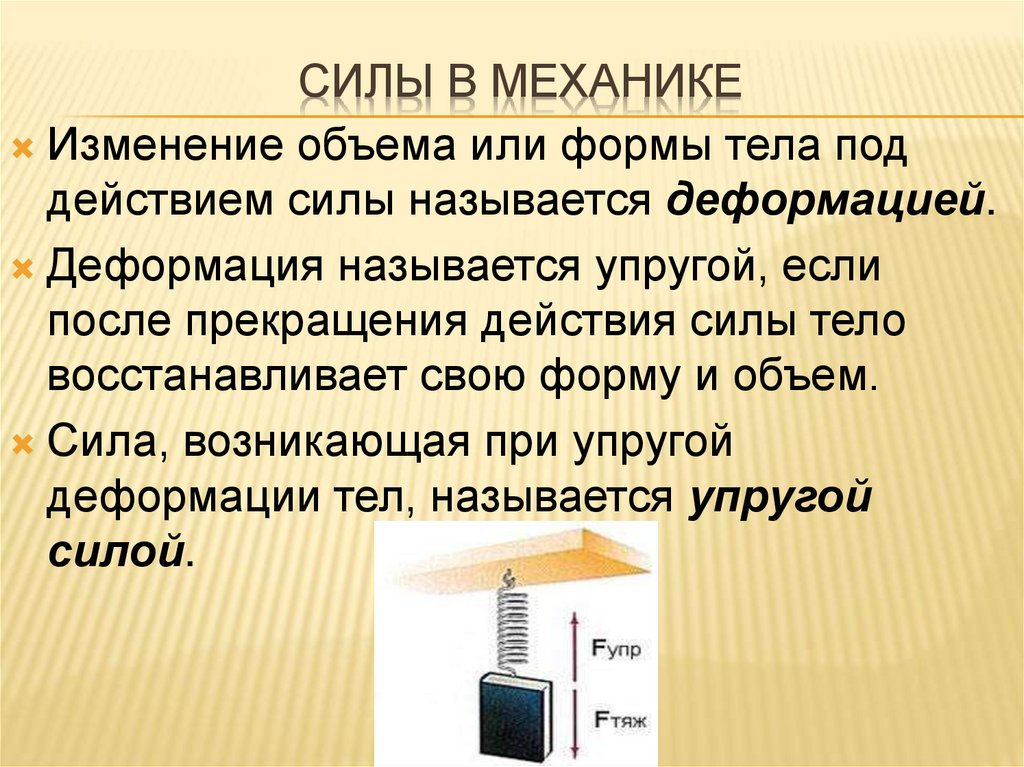
90.
СИЛЫ В МЕХАНИКЕИзменение объема или формы тела под
действием силы называется деформацией.
Деформация называется упругой, если
после прекращения действия силы тело
восстанавливает свою форму и объем.
Сила, возникающая при упругой
деформации тел, называется упругой
силой.
91.
Закон ГукаУпругая сила прямо пропорциональна величине
деформации и направлена в противоположную
сторону:
F = -k ∆l,
где
F – упругая сила,
н
k – коэффициент жесткости, измеряется в
м
∆l – величина деформации.
Знак минус указывает, что упругая сила и
деформация имеют противоположные
направления.
92.
93.
Тре́ние — процесс взаимодействия тел приих относительном движении (смещении)
либо при движении тела в газообразной или
жидкой среде.
Сила трения покоя – сила, возникающая
на границе соприкасающихся тел при
отсутствии их относительного движения.
Сила трения покоя направлена по
касательной к поверхности
соприкасающихся тел в сторону,
противоположную действующей на тело
силе F, и равна ей по величине: Fтр = - F
94.
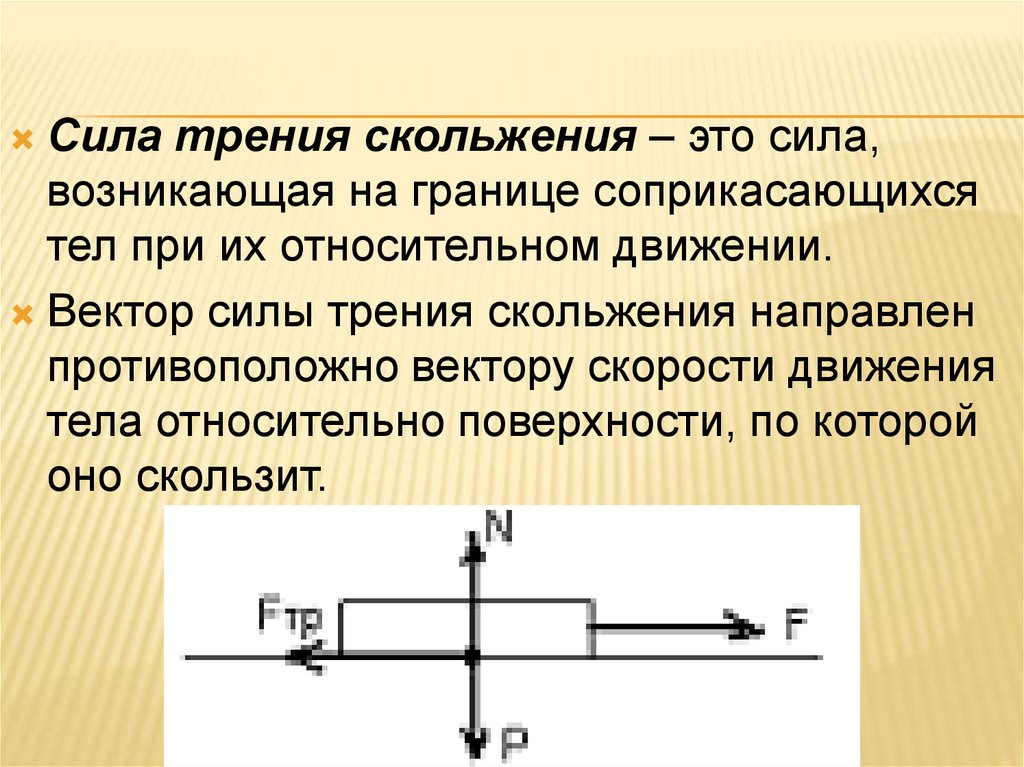
Сила трения скольжения – это сила,возникающая на границе соприкасающихся
тел при их относительном движении.
Вектор силы трения скольжения направлен
противоположно вектору скорости движения
тела относительно поверхности, по которой
оно скользит.
95.
Тело, скользящее по твёрдой поверхности,прижимается к ней силой тяжести Р,
направленной по нормали. В результате
этого поверхность прогибается и появляется
сила упругости N (сила нормального
давления или реакция опоры), которая
компенсирует прижимающую силу Р (N = P). Опыт показывает, что модуль силы
трения скольжения пропорционален силе
нормального давления:
Fтр = μ • N, где
N –сила нормального давления.
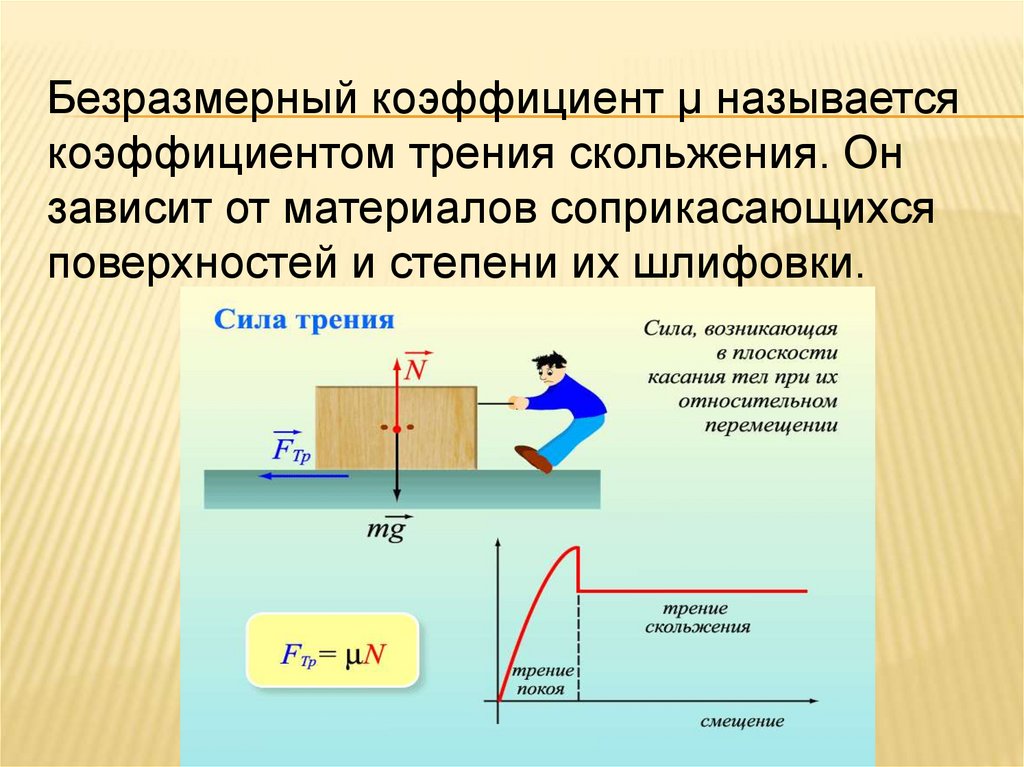
96.
Безразмерный коэффициент μ называетсякоэффициентом трения скольжения. Он
зависит от материалов соприкасающихся
поверхностей и степени их шлифовки.
97.
Например, при передвижении на лыжахкоэффициент трения зависит от качества
смазки (современные дорогостоящие
смазки), поверхности лыжни (мягкая,
сыпучая, уплотнённая, оледенелая) тем или
иным состоянием снега в зависимости от
температуры и влажности воздуха и др.
Большое количество переменных факторов
делает сам коэффициент непостоянным.
98.
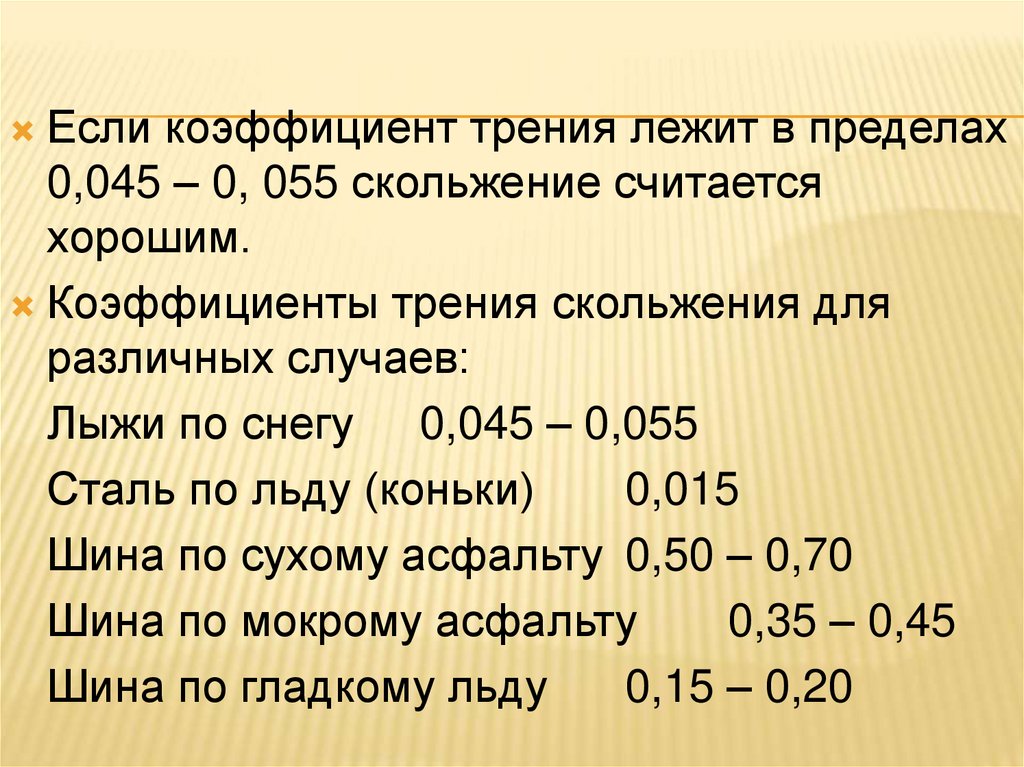
Если коэффициент трения лежит в пределах0,045 – 0, 055 скольжение считается
хорошим.
Коэффициенты трения скольжения для
различных случаев:
Лыжи по снегу 0,045 – 0,055
Сталь по льду (коньки)
0,015
Шина по сухому асфальту 0,50 – 0,70
Шина по мокрому асфальту
0,35 – 0,45
Шина по гладкому льду
0,15 – 0,20
99.
Роль силы трения во многих случаяхпозитивна. Именно благодаря этой силе
возможно передвижение человека, животных
и наземного транспорта. Так, при ходьбе
человек, напрягая мышцы опорной ноги,
отталкивается от земли, стараясь сдвинуть
подошву назад. Этому препятствует сила
трения покоя направленная в обратную
сторону – вперёд.
100.
Знание коэффициентов трения покоя итрения скольжения очень важно при
проектировании поверхностей спортивных
сооружений, спортивной обуви и
спортивного инвентаря.
Сила трения снижает спортивные
результаты в конькобежном, лыжном спорте
и других видах спорта, поэтому ведутся
непрерывные исследования по её
уменьшению.
101.
Тре́ние каче́ния — сопротивлениедвижению, возникающее при перекатывании
тел друг по другу т.е. сопротивление качению
одного тела (катка) по поверхности другого.
Причина трения качения — деформация
катка и опорной поверхности. Проявляется,
например, между элементами подшипников
качения, между шиной колеса автомобиля и
дорожным полотном.
102.
В большинстве случаев величина трениякачения гораздо меньше величины трения
скольжения при прочих равных условиях, и
потому качение является распространенным
видом движения в технике.
Трение качения возникает на границе двух
тел, и поэтому оно классифицируется как
вид внешнего трения.
103.
Импульс. Закон сохранения импульса.Реактивное движение.
Работа силы. Работа потенциальных сил.
Мощность. Энергия. Кинетическая
энергия. Потенциальная энергия.
Закон сохранения механической энергии
104.
И́мпульс (коли́чество движе́ния) —векторная физическая величина,
являющаяся мерой механического движения
тела.
В классической механике импульс тела
равен произведению массы m этого тела на
его скорость ט, направление импульса
совпадает с направлением вектора
скорости:
Р=mט
[P] = [ 1кг х м/с ]
105.
106.
Закон сохранения импульса:Векторная сумма импульсов
взаимодействующих тел, составляющих
замкнутую систему, остается неизменной.
m1 ט1 + m2 ט2 = m1 u1 + m2 u2
m1 ט1 и m2 ט2 - импульсы тел до
взаимодействия,
m1 u1 и m2 u2 - импульсы тел после
взаимодействия
Замкнутой называется система тел,
взаимодействующих только друг с другом и
не взаимодействующих с другими телами.
107.
108.
109.
.110.
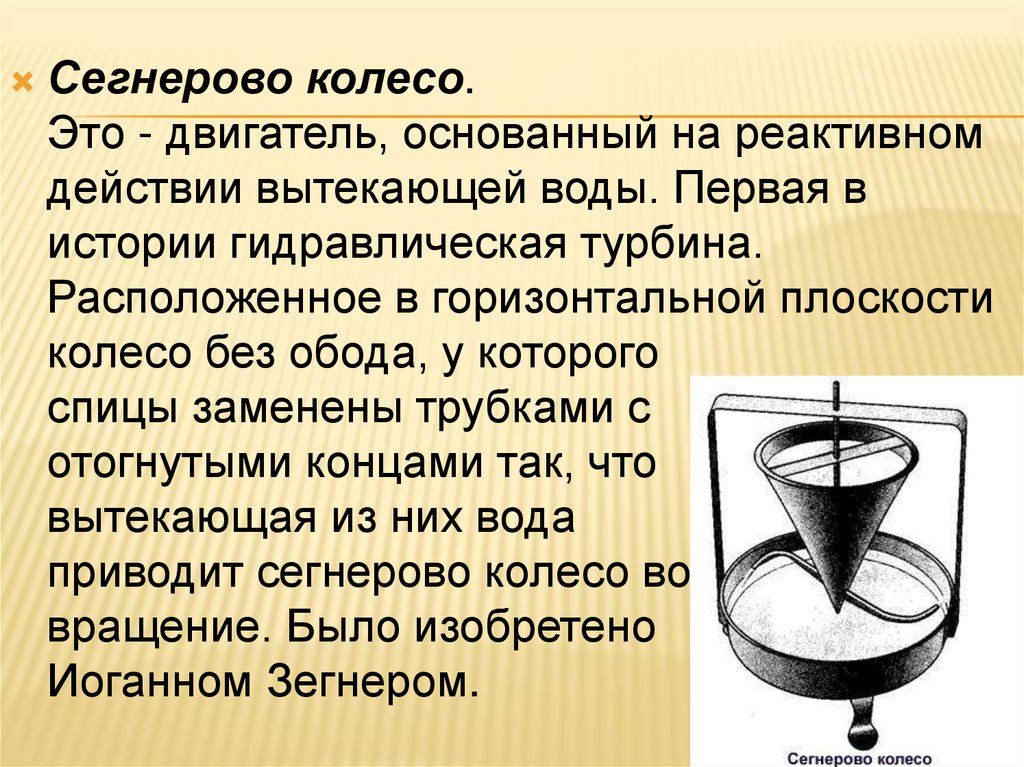
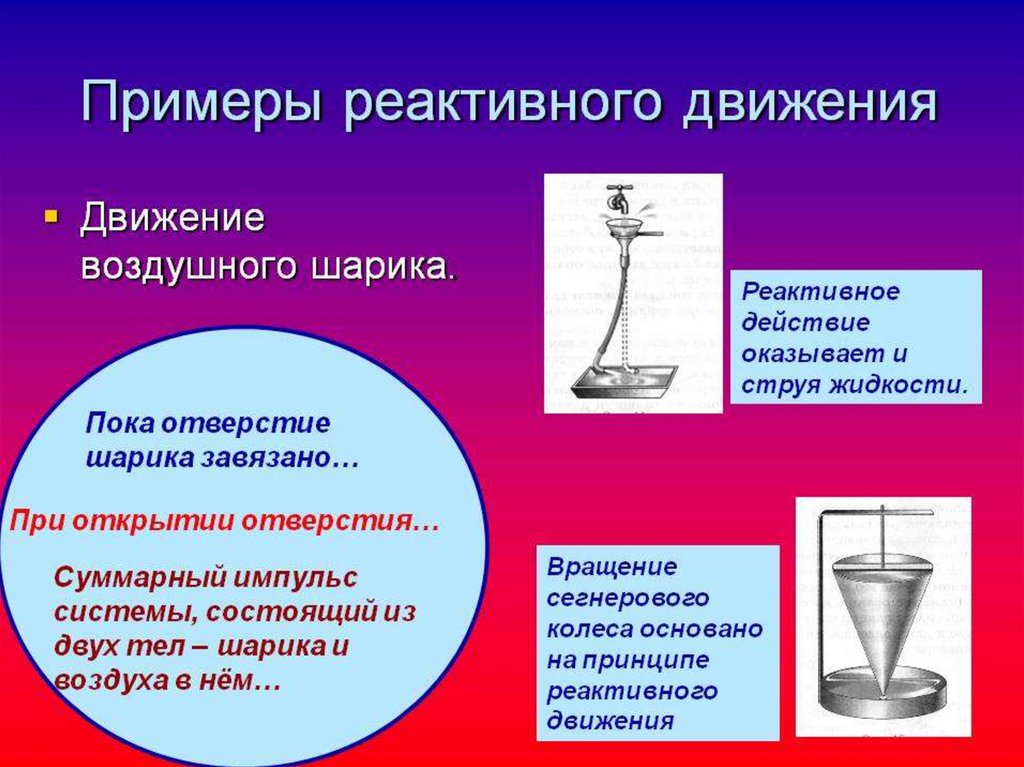
Сегнерово колесо.Это - двигатель, основанный на реактивном
действии вытекающей воды. Первая в
истории гидравлическая турбина.
Расположенное в горизонтальной плоскости
колесо без обода, у которого
спицы заменены трубками с
отогнутыми концами так, что
вытекающая из них вода
приводит сегнерово колесо во
вращение. Было изобретено
Иоганном Зегнером.
111.
112.
Реактивная техника позволила заглянутьчеловеку в глубины космоса. Впервые идею
использования реактивного движения для
космических полетов предложил ученыйинженер Николай Кибальчич. Значительный
вклад в разработку теории космической
техники сделал русский ученый Константин
Эдуардович Циолковский. Впервые
космический корабль с человеком на борту
был запущен в Советском Союзе в 1961 году.
113.
Строение ракеты.В составе любой ракеты, независимо от ее
конструкции, имеется оболочка и топливо с
окислителем.
114.
В технике реактивное движениеиспользуется не только в космонавтике, но
и на речном транспорте (катер с
водометным двигателем), в авиации,
военном деле.
Животный мир. Реактивное движение
присуще каракатицам, медузам, кальмарам,
осьминогам и другим живым организмам.
Каракатица забирает воду в жаберную
полость, а затем энергично выбрасывает
струю воды через воронку. Она направляет
трубку воронки в бок или назад и,
выдавливая из неё воду, может двигаться в
разные стороны.
115.
116.
117.
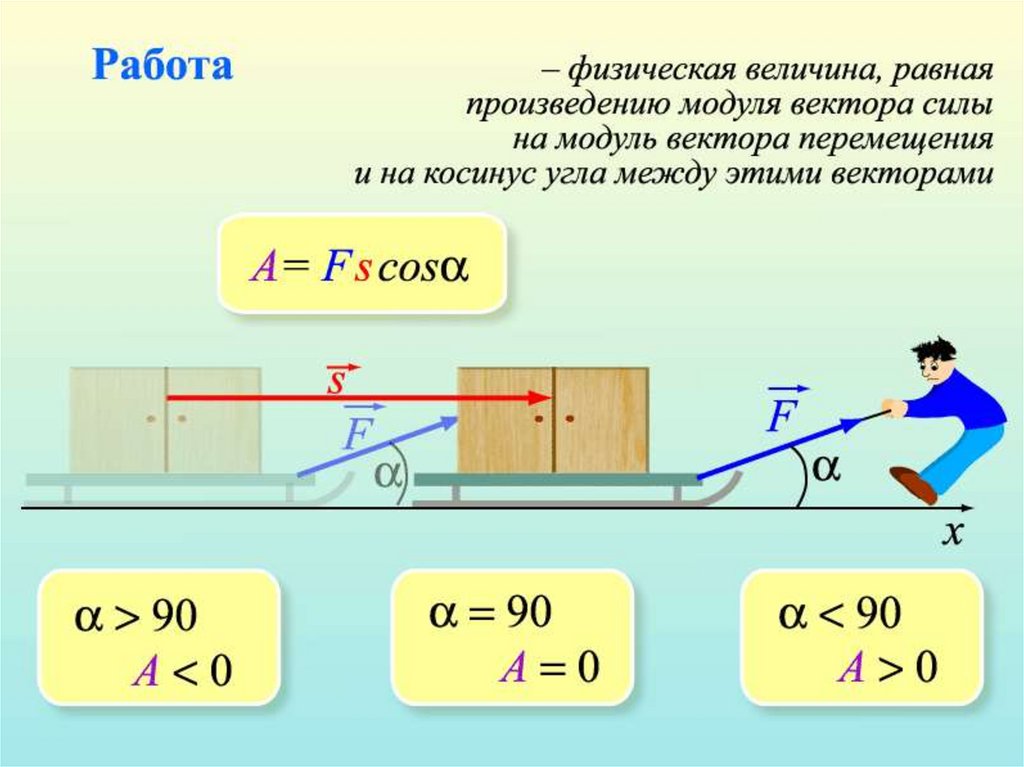
Работой в механике называется величина,равная произведению действующей силы
на перемещение тела и косинус угла между
направлением силы и перемещения:
А = F S cos α,
где
F – сила,
S – перемещение,
α – угол между направлением силы и
перемещения.
118.
119.
В системе СИ за единицу работыпринимается Джоуль (Дж).
Джоуль – это работа, произведенная силой
в 1 н при перемещении тела на 1м вдоль
направления действия силы.
[ A ] =1 Дж = 1н х 1м = 1 н х м
120.
Мощностью называется величина,численно равная работе, совершенной в
единицу времени:
А
Р=
t
В системе СИ за единицу мощности
принимают ватт (Вт)
Ватт – это мощность, при которой за 1с
совершается работа в 1 Дж.
1Дж
[ P ] = 1Вт =
1с
121.
Энергией называется физическая величина,характеризующая способность тел
совершать работу. Работа служит мерой
изменения механической энергии:
А = Е2 - Е1
Механическая энергия измеряется в тех же
единицах, что и работа.
Потенциальная энергия – это энергия,
определяемая взаимным расположением
тел или частей одного и того же тела (тело
поднятое над Землей, растянутая или
сжатая пружина, сжатый газ).
122.
Потенциальная энергия тела, поднятого навысоту h относительно Земли:
Еп = mgh,
где
Еп - потенциальная энергия тела, поднятого
на высоту h,
m – масса тела,
g – ускорение свободного падения.
Потенциальная энергия упруго
деформированного тела равна работе,
совершаемой при упругой деформации тел :
k ∆x2
Еп = А =
2
123.
Кинетическая энергия – это энергия,которой обладает тело вследствие своего
движения.
mט2
Ек =
2
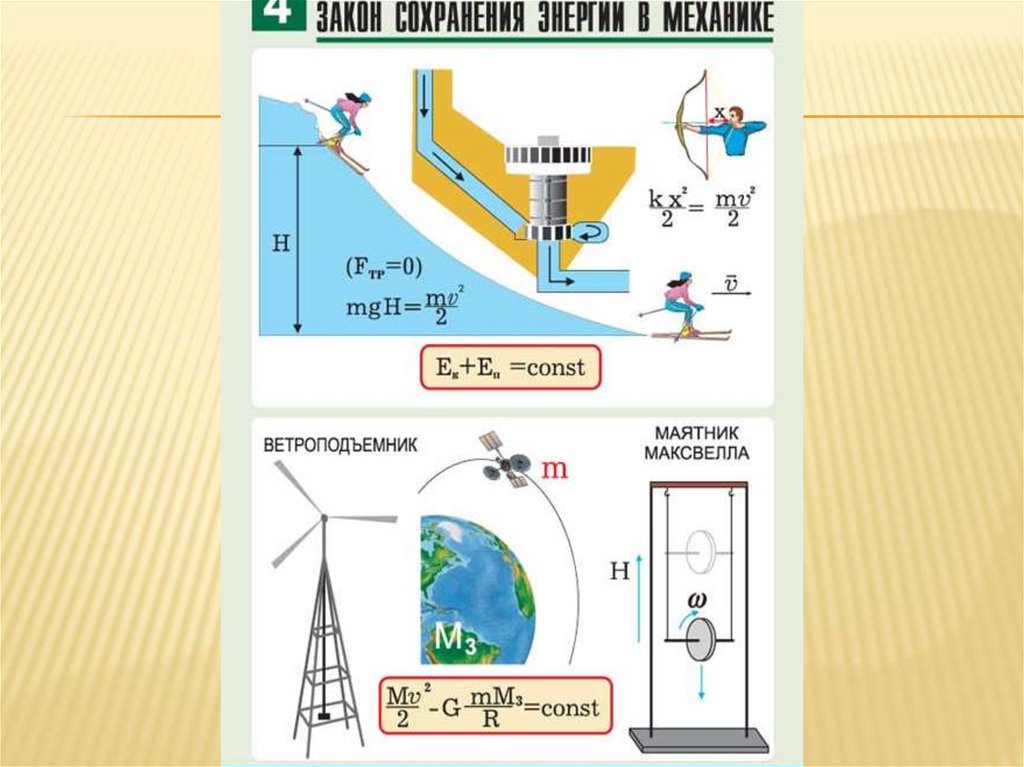
Закон сохранения энергии. Энергия не
исчезает и не создается, она лишь
переходит из одного вида в другой в равных
количествах.
Сумма потенциальной и кинетической
энергий тела при его падении есть величина
постоянная:
Еп + Ек = const