











 industry
industrySimilar presentations:





")




Роль промышленных роботов в производстве
1.
РОЛЬ ПРОМЫШЛЕННЫХ РОБОТОВВ ПРОИЗВОДСТВЕ
Реферативная работа
на интеллектуальный форум молодежи
"Шаг в будущее"
Авторы:
Неструев Макар Иванович,
г.Челябинск, МАОУ «Лицей № 97 г.
Челябинска», класс 1
2018 г.
Руководитель:
Нестерова Ираида Витальевна,
учитель начальных классов,
МАОУ
«Лицей № 97 г. Челябинска».
2.
СОДЕРЖАНИЕОпределение и типы промышленных роботов.
Применение промышленных роботов
Привила безопасности при работе с промышленным роботом
Коллаборативный робот
Экспериментальная часть.
Заключение
3.
ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВПромышленный робот совсем не
похож на человека - это
автоматическое устройство, состоящее
из манипулятора и программируемого
устройства управления, которое задает
требуемые движения органов
манипулятора. Применяется для
перемещения предметов и
выполнения различных
технологических операций.
4.
ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВСтандартный манипулятор выполнен из нескольких
сегментов, которые соединяются с помощью суставов.
Каждый сегмент выполнен из металлического корпуса
и проводов. В каждом сегменте присутствуют
двигатели, которые заставляют суставы двигаться.
Управление суставами и роботом в целом
осуществляется с помощью компьютера, который
заставляет вращаться конкретный двигатель.
5.
ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВУправляемы робот – управляется
человеком (оператором)
Полуавтономный робот – действуют
строго по заданной программе,
зачастую не имеют сенсоров и не
способны корректировать свои
действия, не могут обойтись без
участия рабочего.
Автономный робот – могут работать
без участия человека, согласно
заданным алгоритмам и корректируя
свои действия по мере
необходимости.
6.
ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ• Промышленные роботы выполняют сложную и
тяжелую работу, заменяют людей в опасном
производстве, способны работать длительное время
без остановки.
• Выполняют усилия нескольких рабочих.
• Роботы не ошибаются и не опаздывают на работу.
• Не требуют постоянного контроля за работой.
Применяются – в производстве
автомобилей, авиации,
сложных станков,
кораблестроении.
7.
ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВСварка
Погрузка
Раскрой материала
-
плазменная резка
лазерная резка
гидроабразивная резка
Литейное и
кузнечнопрессовое
производство
8.
ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВГибка труб
Фрезерование и
сверление
Шлифование
9.
ПРАВИЛА БЕЗОПАСНОСТИРоботов устанавливают в
специально отведенных местах,
окрашивают в яркие цвета и
монтируют ограждения в зоне
действия робота, чтобы не
подвергать опасности людей.
При любом физическом
взаимодействии человека с
промышленным роботом механизм
необходимо предварительно
отключить.
10.
КОЛЛАБОРАТИВНЫЙ РОБОТ (КОБОТ)Коллаборативный робот (кобот) — это автоматическое устройство,
которое может работать совместно с человеком для производства
различных продуктов.
Коботы могут работать рядом с человеком, а иногда и вместе с ним —
например, завинчивать шурупы, когда человек удерживает предмет
руками. В некоторых случаях работу можно разделить: роботы делают
одно, а люди — другое.
11.
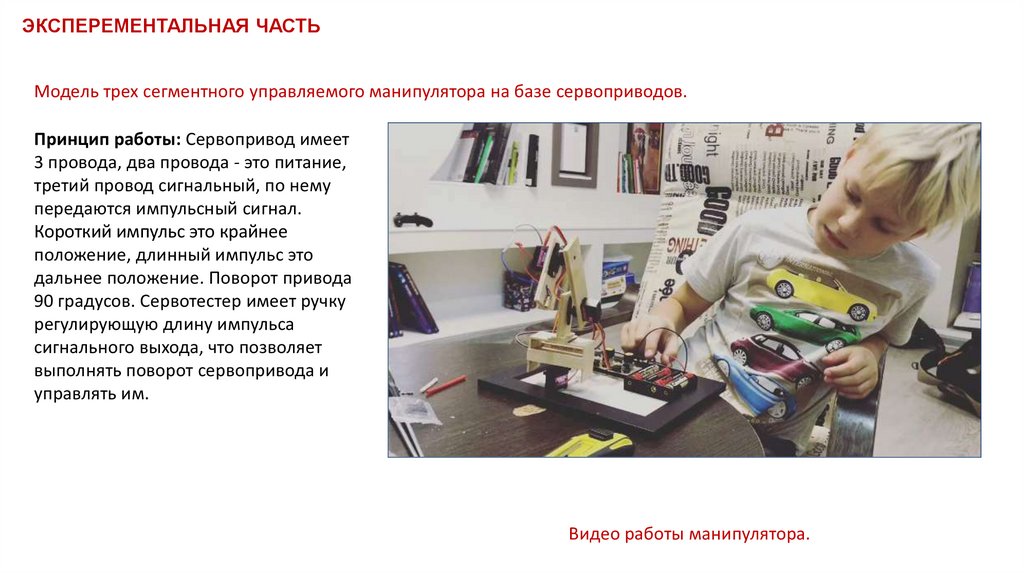
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬМодель трех сегментного управляемого манипулятора на базе сервоприводов.
Материалы:
• 3 сервопривода,
• 3 сервотестера,
• батарейный блок (на 4 шт тип АА),
• кнопка (вкл/выкл),
• лазер,
• кнопка замыкания,
• деревянные линейки,
• рамка для фотографии.
12.
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬМодель трех сегментного управляемого манипулятора на базе сервоприводов.
В качестве площадки для манипулятора была взята
рамка для фотографии, на которую при помощи
клеевого пистолета закрепили сервотестеры и
батарейный блок. При помощи проводов и разъемов
подали напряжение на них, установили кнопку
включения. Далее из деревянных линеек подготовил
основание манипулятора и два сегмента
манипулятора. В сегментах закрепил сервопривода.
Один сервопривод приклеил на площадку и
установил на него основание. Затем на основание
закрепил первый сегмент и к нему второй сегмент.
На конце второго сегмента установил лазер.
Подключил сервопривода к сервотестерам. А на
лазер на провод питания лазера установил кнопку
замыкания. Приклеил кнопку на площадку.
13.
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬМодель трех сегментного управляемого манипулятора на базе сервоприводов.
Принцип работы: Сервопривод имеет
3 провода, два провода - это питание,
третий провод сигнальный, по нему
передаются импульсный сигнал.
Короткий импульс это крайнее
положение, длинный импульс это
дальнее положение. Поворот привода
90 градусов. Сервотестер имеет ручку
регулирующую длину импульса
сигнального выхода, что позволяет
выполнять поворот сервопривода и
управлять им.
Видео работы манипулятора.
14.
ЗАКЛЮЧЕНИЕПрименение роботов в промышленном производстве имеет ряд преимуществ:
• Дольше и больше работает!
• Уменьшает производственные потери!
• Рационально использует оборудования и производственные помещения!
• Улучшает качество продукции, связанное с повышением точности выполнения технологических операций!
• Не устает!
• Выполняет опасную для людей работу!
15.
СПАСИБО ЗА ВНИМАНИЕ!2018 г.