

Similar presentations:







")


Подготовка модели исследований: система управления с ПИД - регулятором
1. . Подготовка модели исследований: система управления с ПИД - регулятором.
2. 1.1.Формирование модели в пакете Simulink
Параметрический анализ системы управления проводится для примера модели сименем model1, набранной в пакете Simulink.
Модель относится к классу систем с обратной связью.
Для представления модели используется блочно-иерархический подход.
Система имеет ряд вложенных подсистем.
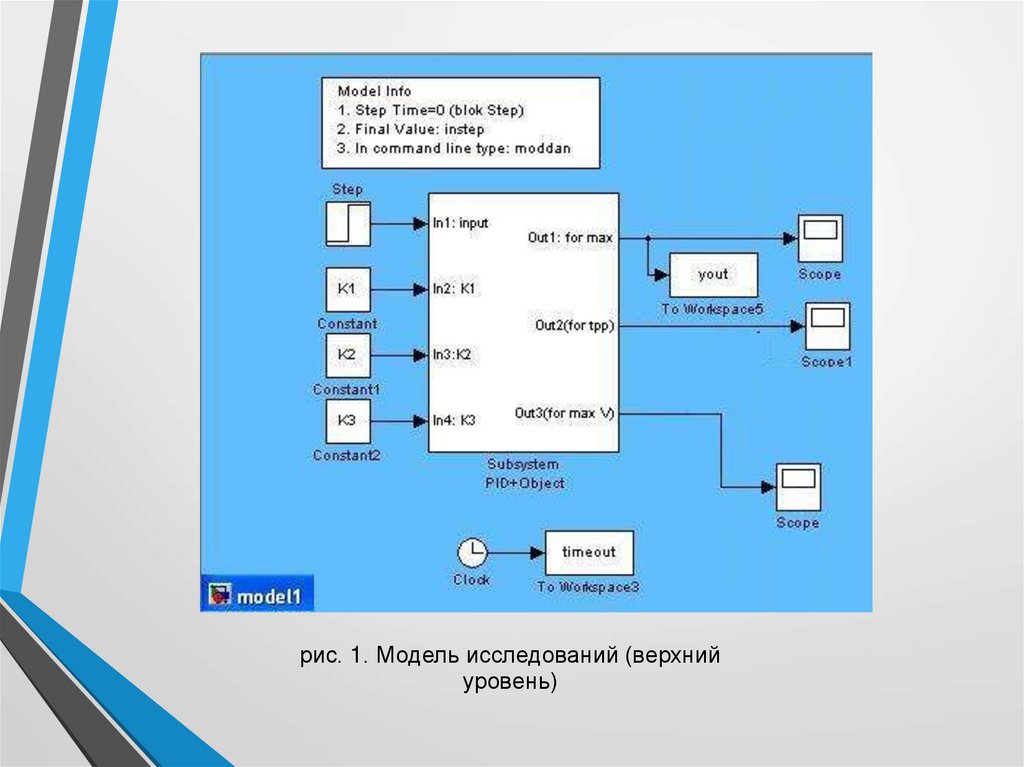
Структурная схема верхнего уровня представлена на рис.1.
Входное воздействие — ступенчатая функция step с величиной ступеньки instep,
подаваемая в нулевой момент времени (Step Time=0)
Для оперативного отображения переходного процесса по управляемой координате
используется осциллограф Scope1.
Параметрические исследования проводятся для оценки влияния параметров ПИДрегулятора K1,K2,K3.
3.
рис. 1. Модель исследований (верхнийуровень)
4.
Для последующей графической интерпретации и численныхобработок значения критериев загружаются в рабочее
пространство workspace пакета MATLAB с помощью блоков
ToWorkspace. Используется представление выходной
информации типа array. На первом этапе исследований
запоминаются следующие массивы чисел в зависимости от
времени:
yout — управляемая координата
timeout- текущее время.
5.
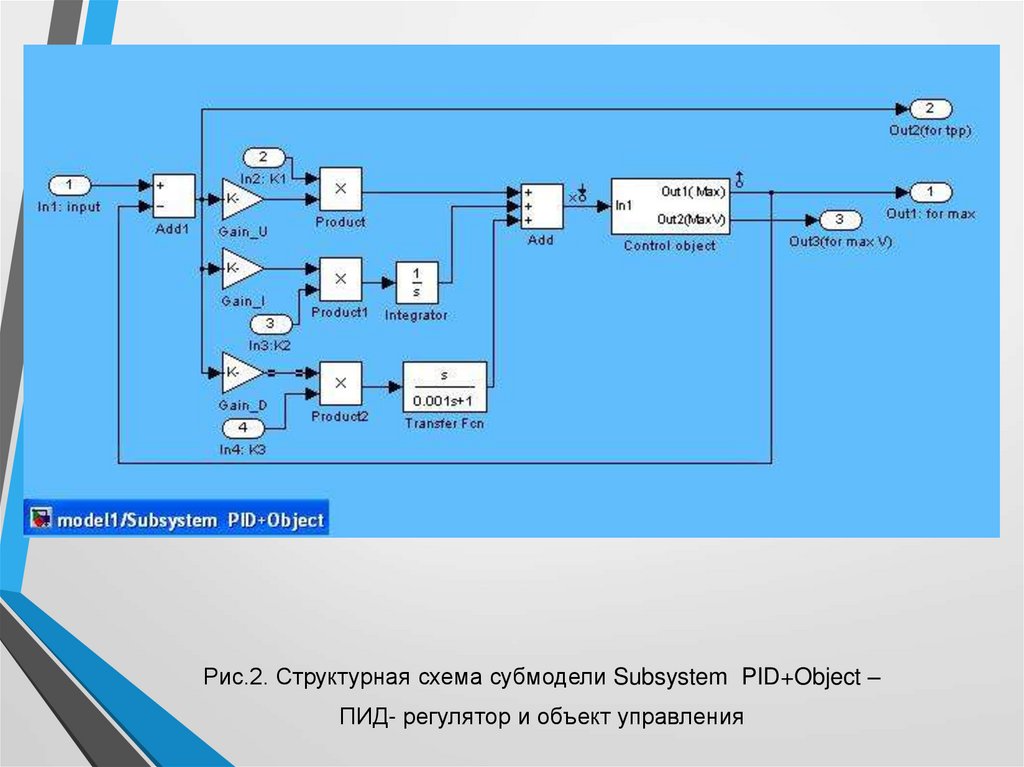
Рис.2. Структурная схема субмодели Subsystem PID+Object –ПИД- регулятор и объект управления
6.
Корректирующее устройство — ПИД-регулятор использует информацию обошибке системы (вход In1:input), управляющее воздействие формируется как
сумма трех составляющих (блок Add):
- ошибка (основной коэффициент усиления K1 и добавочный множитель
Gain_U)
- интеграл ошибки (основной коэффициент усиления K2 и добавочный
множитель Gain_I)
- дифференциал ошибки (основной коэффициент усиления K3 и добавочный
множитель Gain_D)
Параметрические исследования проводятся для оценки влияния параметров
ПИД- регулятора K1,K2,K3.
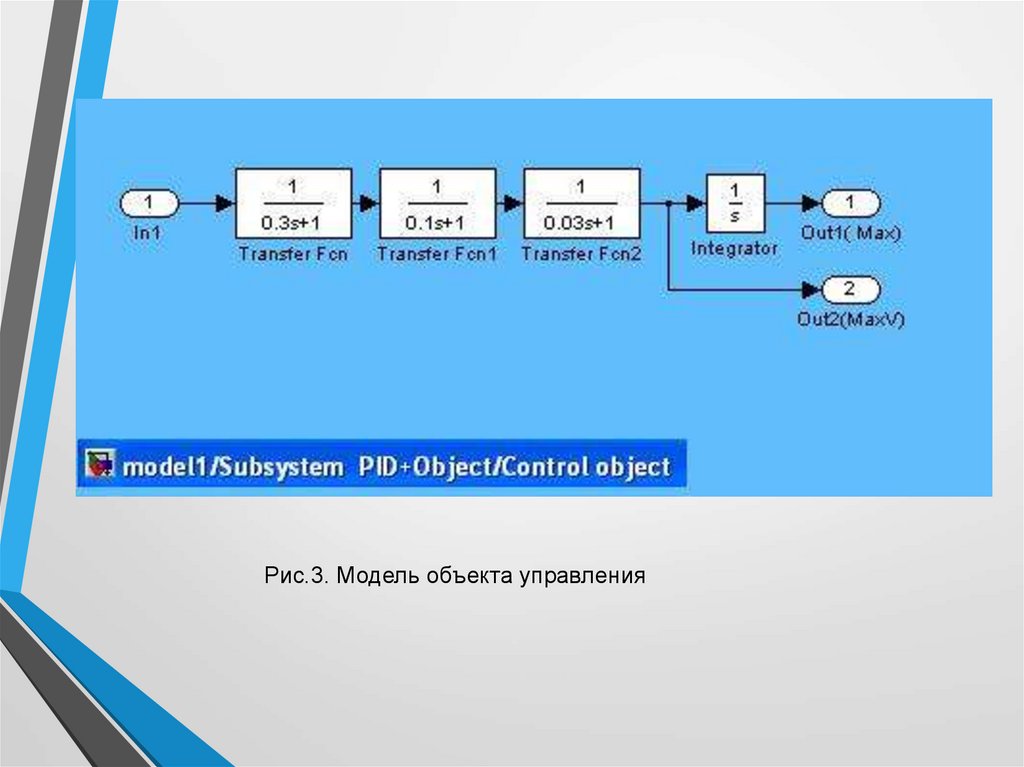
7.
Рис.3. Модель объекта управления8.
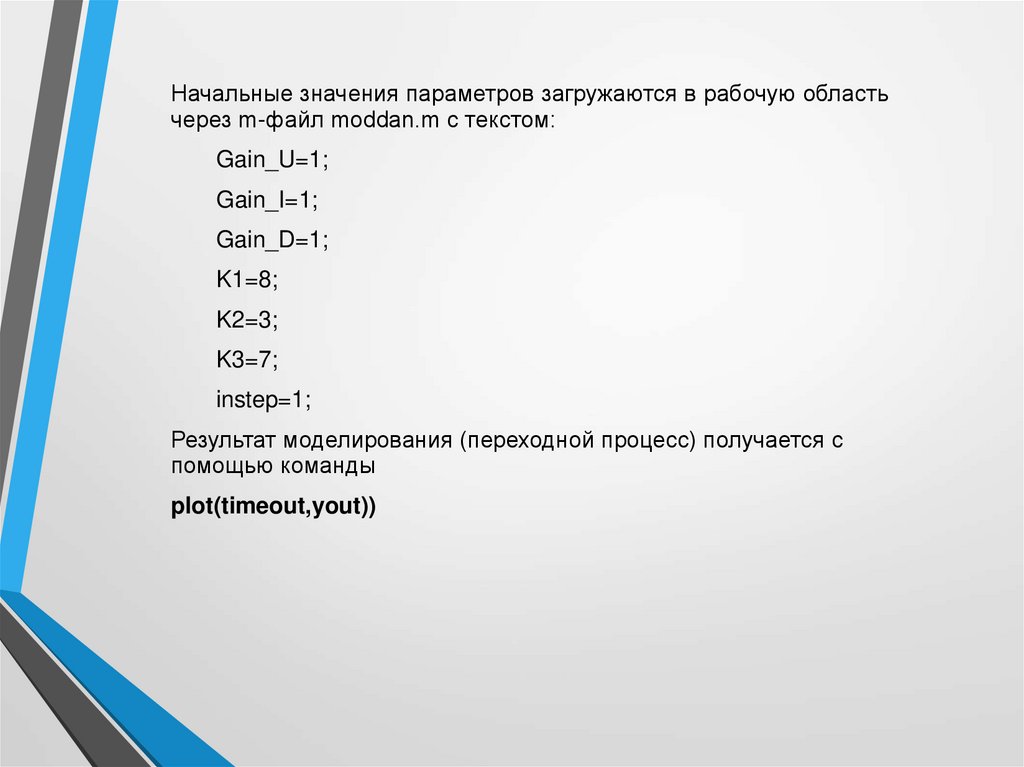
Начальные значения параметров загружаются в рабочую областьчерез m-файл moddan.m с текстом:
Gain_U=1;
Gain_I=1;
Gain_D=1;
K1=8;
K2=3;
K3=7;
instep=1;
Результат моделирования (переходной процесс) получается с
помощью команды
plot(timeout,yout))
9.
Задание № 11.1. Создать m-файл moddan.m
1.2. Набрать схему model1.mdl
1.3. Промоделировать в пакете Simulink
1.4. Получить график переходного процесса, набрав в командной
строке основного окна MATLAB команду plot…(см. слайд 9)
Отчет: график переходного процесса