





 electronics
electronicsSimilar presentations:


")







Асинхронные машины. Лекция 13
1.
БГТУ «ВОЕНМЕХ» им. Д.Ф. Устиновакафедра электротехники, О8
Лекция 13
Асинхронные машины
2.
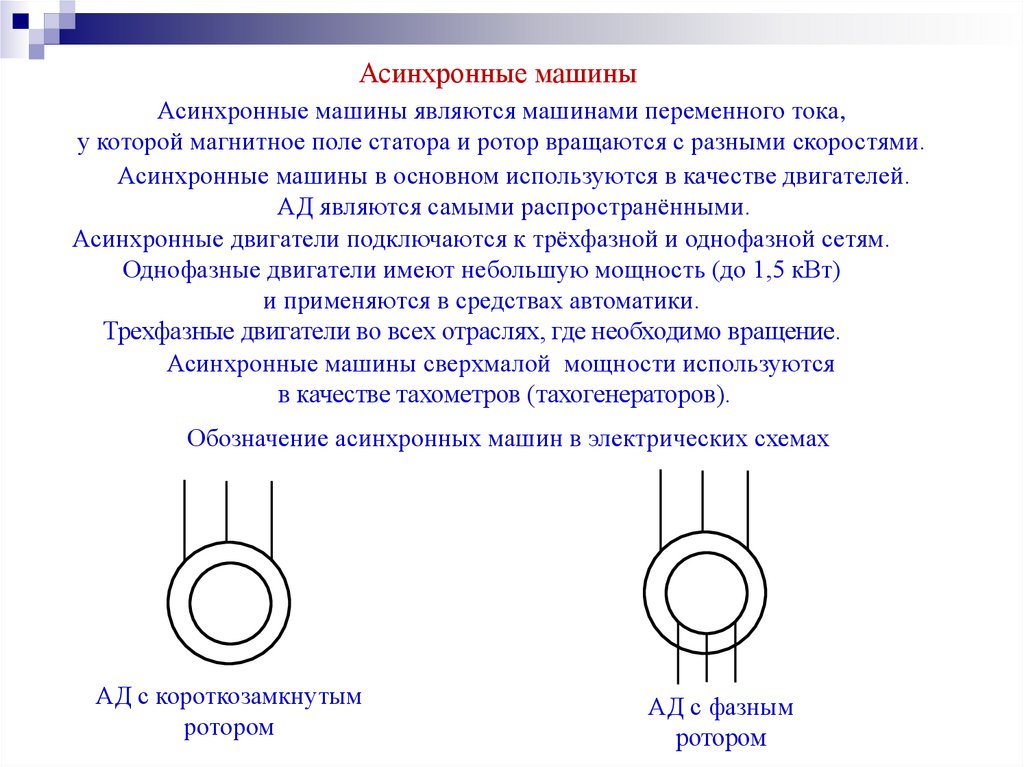
Асинхронные машиныАсинхронные машины являются машинами переменного тока,
у которой магнитное поле статора и ротор вращаются с разными скоростями.
Асинхронные машины в основном используются в качестве двигателей.
АД являются самыми распространёнными.
Асинхронные двигатели подключаются к трёхфазной и однофазной сетям.
Однофазные двигатели имеют небольшую мощность (до 1,5 кВт)
и применяются в средствах автоматики.
Трехфазные двигатели во всех отраслях, где необходимо вращение.
Асинхронные машины сверхмалой мощности используются
в качестве тахометров (тахогенераторов).
Обозначение асинхронных машин в электрических схемах
АД с короткозамкнутым
ротором
АД с фазным
ротором
3.
Устройство асинхронного двигателяАсинхронные двигатели состоят из статора и ротора.
Сердечник статора представляет собой полый цилиндр,
собранный из листов электротехнической стали и имеет пазы.
В пазы уложены обмотки возбуждения.
Устройство статора асинхронной машины
4.
Устройство асинхронного двигателяКороткозамкнутый ротор асинхронного двигателя
(типа «беличьей клетки»)
1 – магнитопровод, из листов электротехнической стали;
2 – проводники алюминиевые, залитые в пазы магнитпровода.
5.
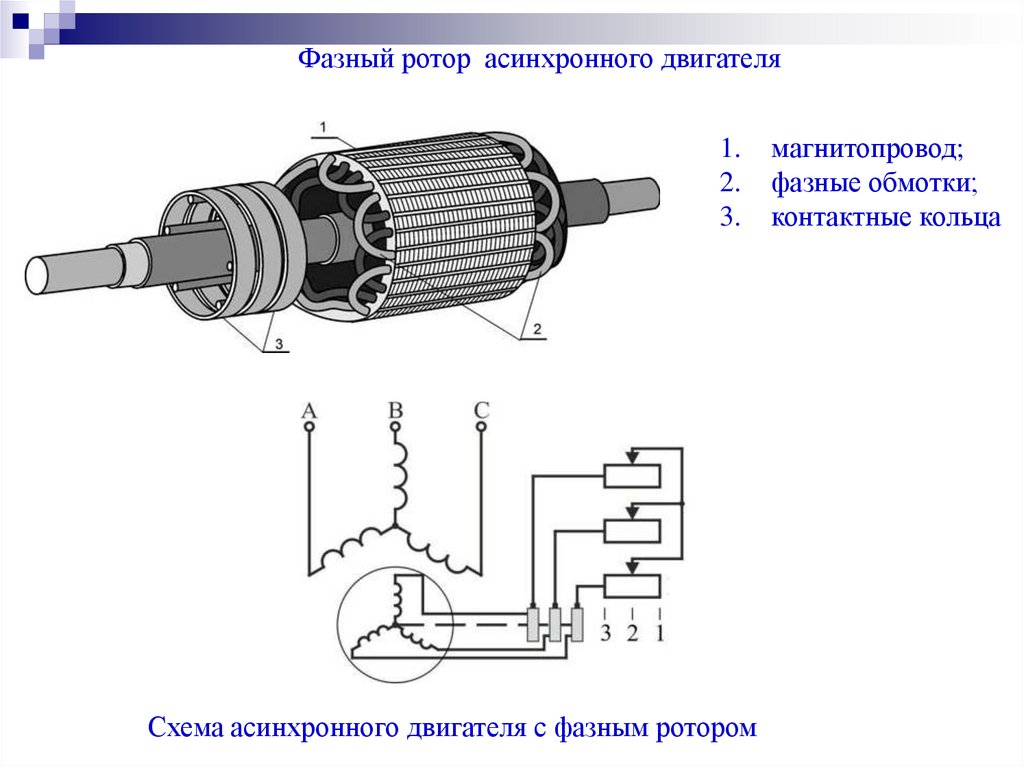
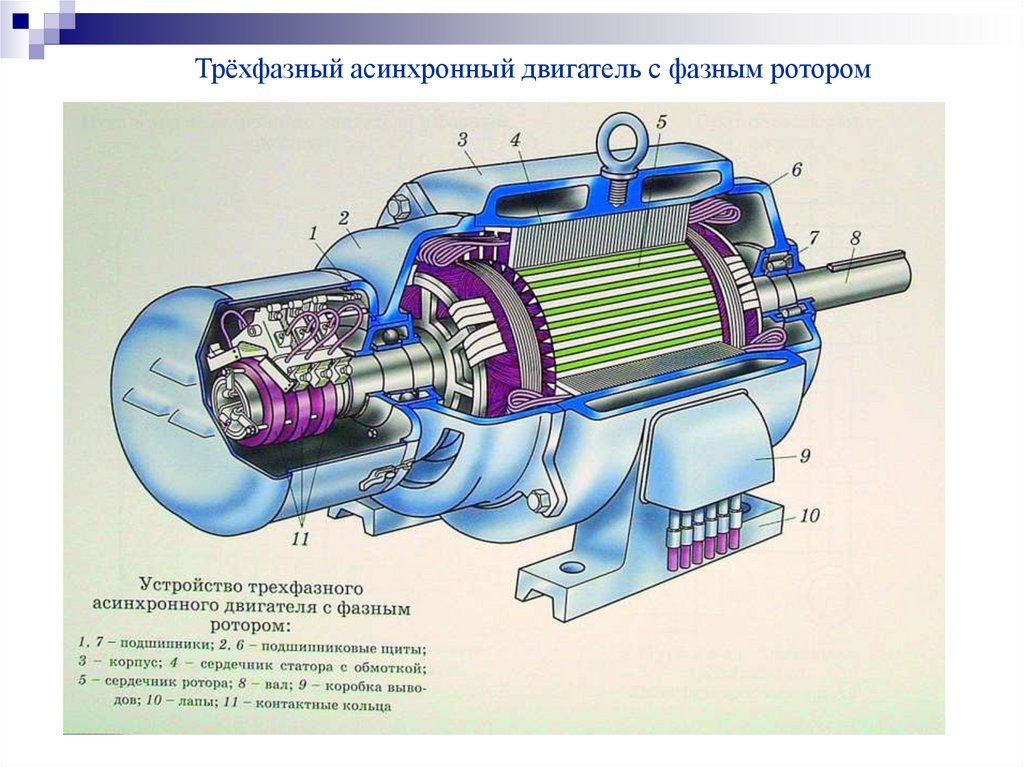
Фазный ротор асинхронного двигателя1.
2.
3.
Схема асинхронного двигателя с фазным ротором
магнитопровод;
фазные обмотки;
контактные кольца
6.
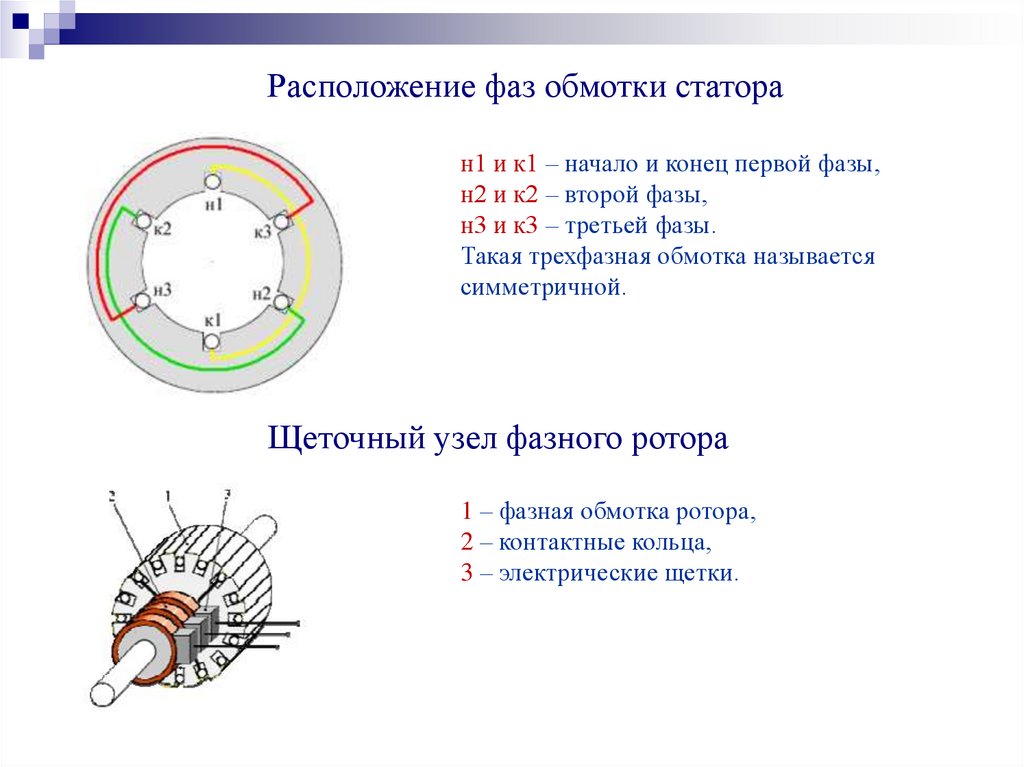
Расположение фаз обмотки статоран1 и к1 – начало и конец первой фазы,
н2 и к2 – второй фазы,
н3 и к3 – третьей фазы.
Такая трехфазная обмотка называется
симметричной.
Щеточный узел фазного ротора
1 – фазная обмотка ротора,
2 – контактные кольца,
3 – электрические щетки.
7.
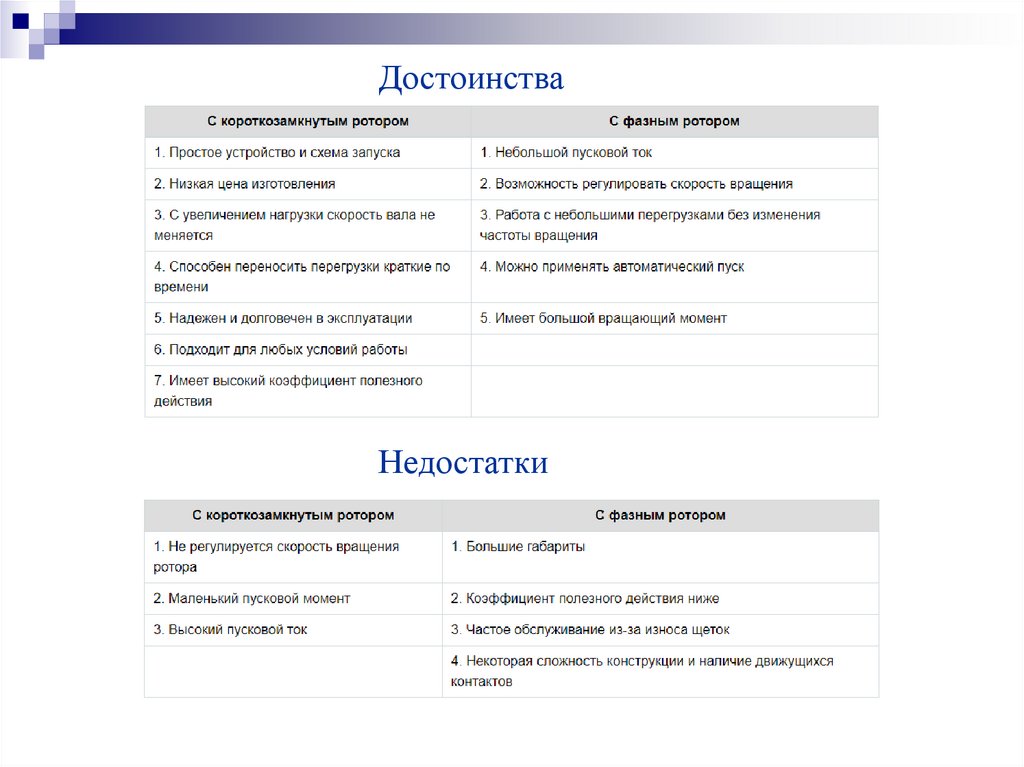
ДостоинстваНедостатки
8.
Трёхфазный асинхронный двигатель с фазным ротором9.
Принцип действия асинхронного двигателяПеременный ток в фазных обмотках создает вращающее магнитное поле с
угловой скоростью 1. (или n1).
Вращающее магнитное поле пересекает витки ротора (якоря) и индуцирует в них ЭДС.
Так как концы проводников замкнуты накоротко, то в них возникает ток.
Возникший ток взаимодействует с вращающимся магнитным потоком, появляется пара
сил Ампера, действующих на проводники, приводят во вращение ротор.
10.
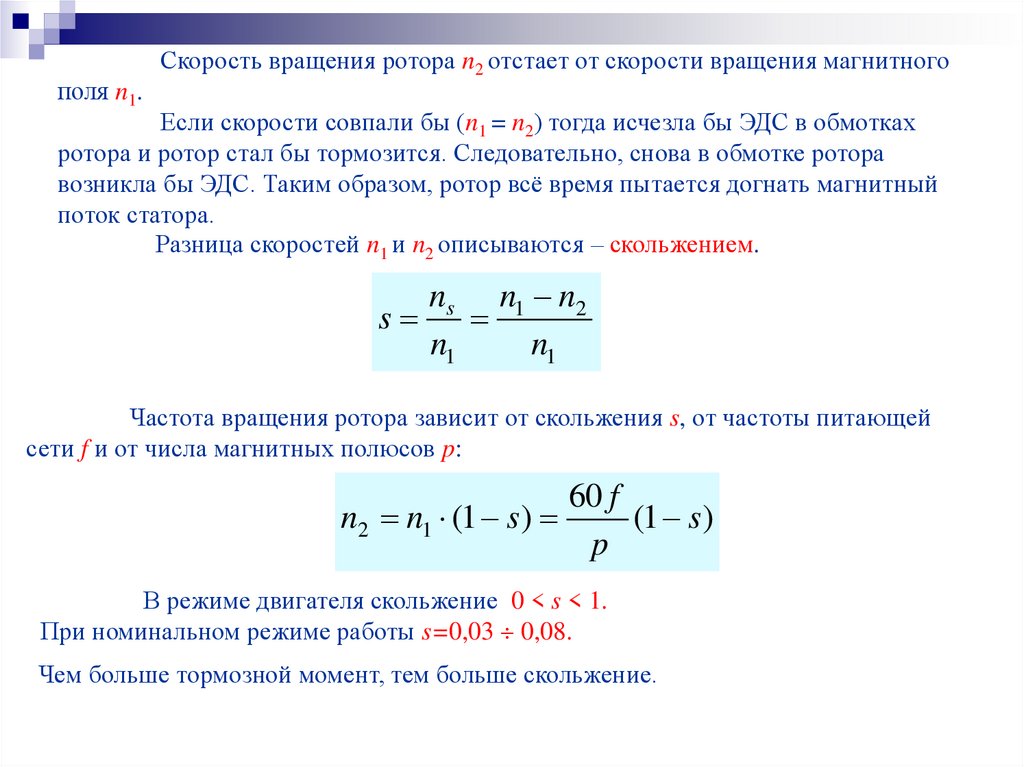
поля n1.Скорость вращения ротора n2 отстает от скорости вращения магнитного
Если скорости совпали бы (n1 = n2) тогда исчезла бы ЭДС в обмотках
ротора и ротор стал бы тормозится. Следовательно, снова в обмотке ротора
возникла бы ЭДС. Таким образом, ротор всё время пытается догнать магнитный
поток статора.
Разница скоростей n1 и n2 описываются – скольжением.
ns n1 n2
s
n1
n1
Частота вращения ротора зависит от скольжения s, от частоты питающей
сети f и от числа магнитных полюсов p:
n2 n1 (1 s )
60 f
(1 s )
p
В режиме двигателя скольжение 0 < s < 1.
При номинальном режиме работы s=0,03 0,08.
Чем больше тормозной момент, тем больше скольжение.
11.
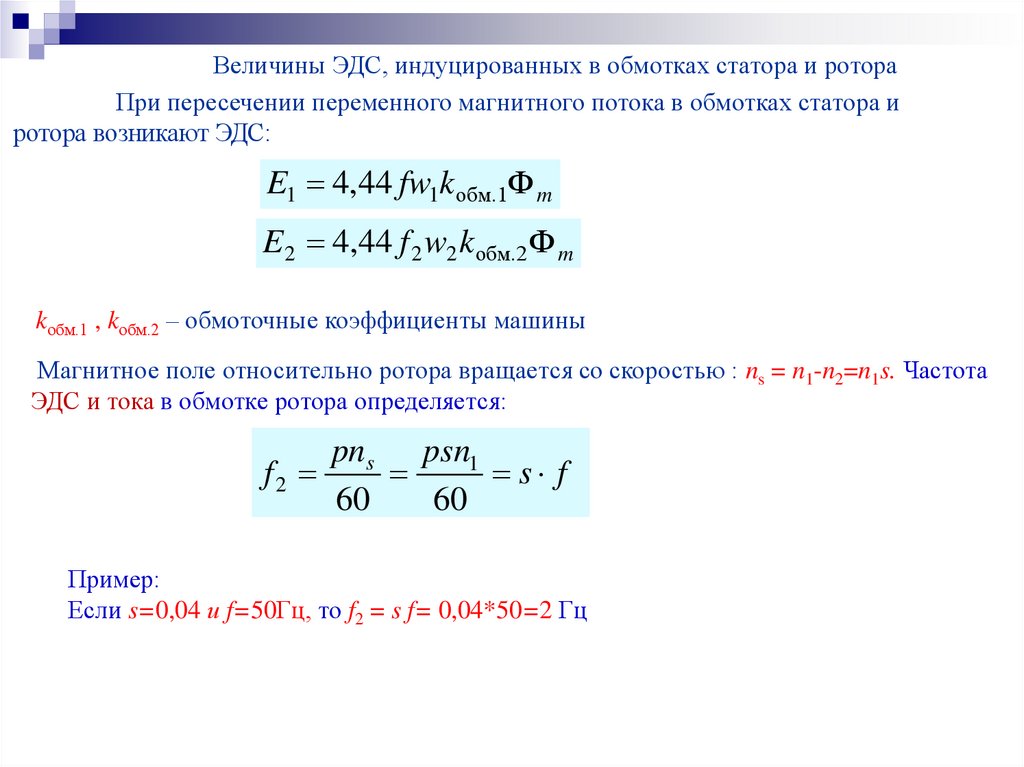
Величины ЭДС, индуцированных в обмотках статора и ротораПри пересечении переменного магнитного потока в обмотках статора и
ротора возникают ЭДС:
E1 4,44 fw1k обм.1Ф m
E2 4,44 f 2 w2 k обм.2 Ф m
kобм.1 , kобм.2 – обмоточные коэффициенты машины
Магнитное поле относительно ротора вращается со скоростью : ns = n1-n2=n1s. Частота
ЭДС и тока в обмотке ротора определяется:
f2
pns psn1
s f
60
60
Пример:
Если s=0,04 и f=50Гц, то f2 = s f= 0,04*50=2 Гц
12.
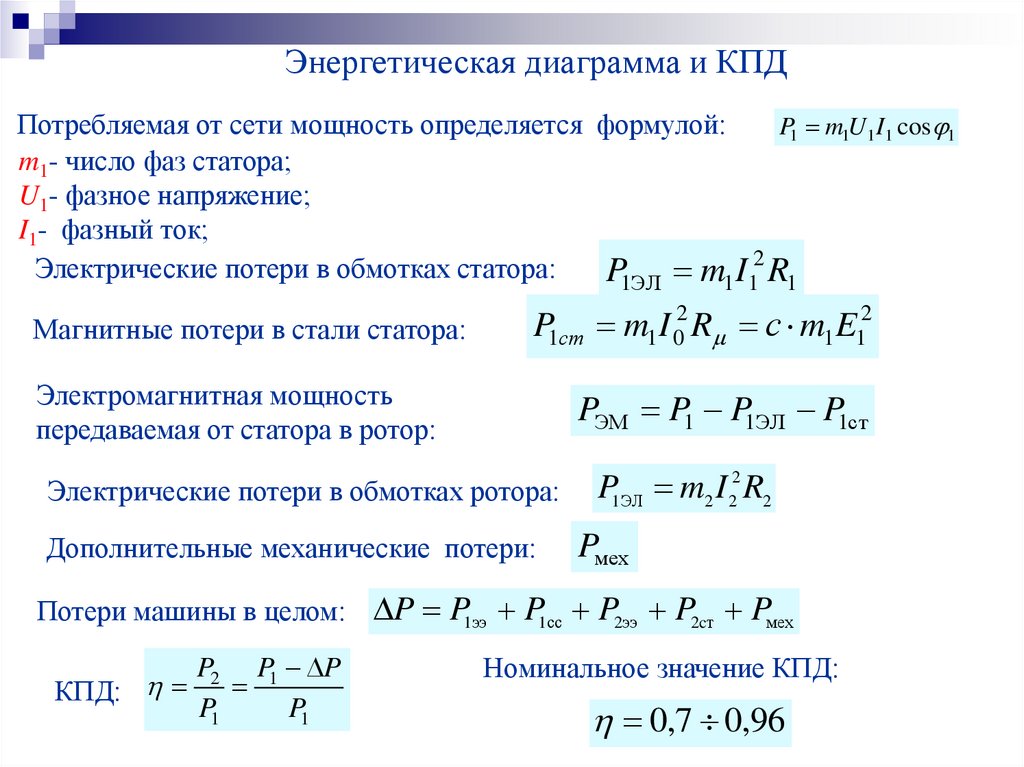
Энергетическая диаграмма и КПДПотребляемая от сети мощность определяется формулой:
P1 m1U1 I1 cos 1
m1- число фаз статора;
U1- фазное напряжение;
I1- фазный ток;
Электрические потери в обмотках статора:
P1ЭЛ m1 I12 R1
Магнитные потери в стали статора:
P1ст m1 I 02 R с m1 E12
Электромагнитная мощность
передаваемая от статора в ротор:
PЭМ P1 P1ЭЛ P1ст
Электрические потери в обмотках ротора:
Дополнительные механические потери:
P1ЭЛ m2 I 22 R2
Pмех
Потери машины в целом: P P1ээ P1сс P2ээ P2cт Pмех
P2 P1 P
КПД:
P1
P1
Номинальное значение КПД:
0,7 0,96
13.
Вращающий момент асинхронного двигателяЭлектромагнитная мощность двигателя определяется моментом
(механическая мощность на валу двигателя)
Pэм M 2
2 – угловая скорость вращения ротора (рад/сек)
2 n2
2
60
С учётом математических преобразований
M cм I 2 Фm cos 2
Вращающий момент асинхронного двигателя пропорционален
току ротора, амплитуде вращающего магнитного потока и косинусу угла
между током и напряжением в роторе.
В асинхронном двигателе вращающий момент создается только
активной составляющей тока!
Учитывая происходящие электромагнитные процессы получим
m1 pU12 R2 / s
M
2 f (( R1 R2 / s ) 2 ( x1 x2 ) 2 )
14.
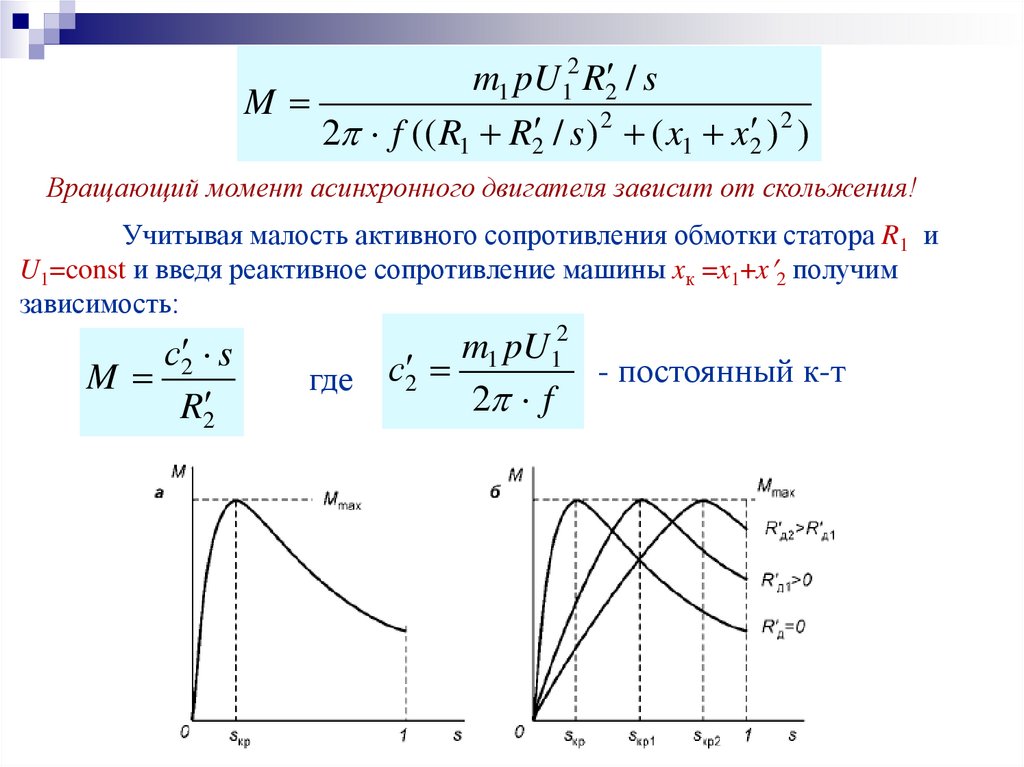
m1 pU12 R2 / sM
2 f (( R1 R2 / s ) 2 ( x1 x2 ) 2 )
Вращающий момент асинхронного двигателя зависит от скольжения!
Учитывая малость активного сопротивления обмотки статора R1 и
U1=const и введя реактивное сопротивление машины xк =x1+x 2 получим
зависимость:
с2 s
M
R2
m1 pU12
- постоянный к-т
где с2
2 f
15.
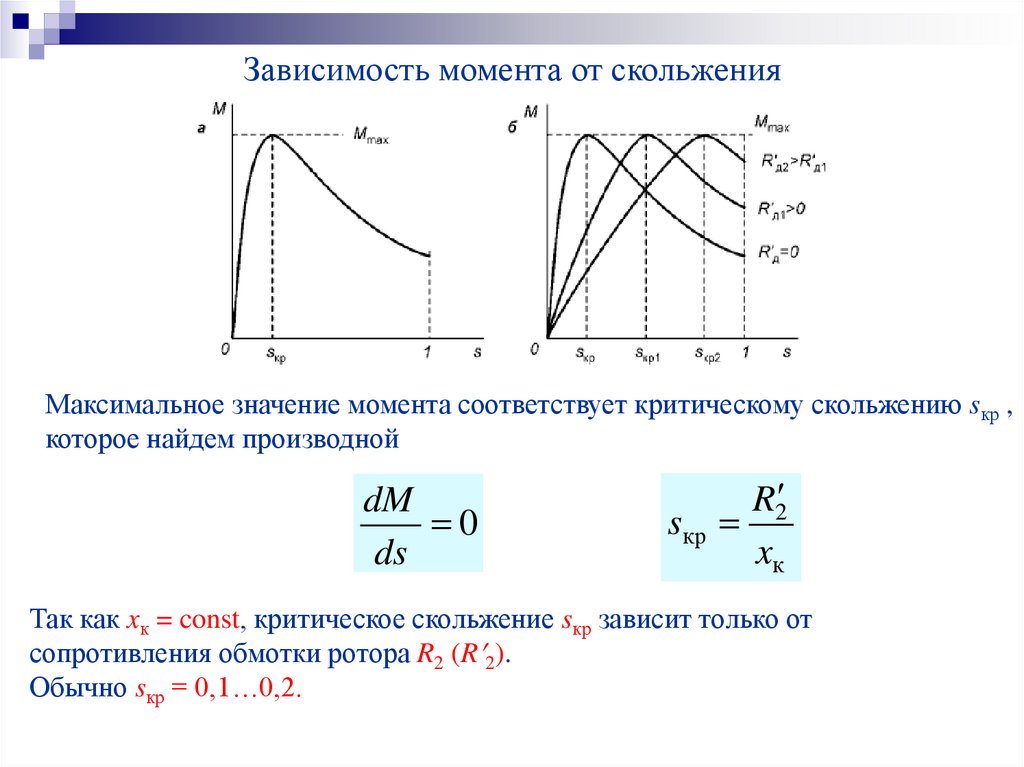
Зависимость момента от скольженияМаксимальное значение момента соответствует критическому скольжению sкр ,
которое найдем производной
dM
0
ds
R2
sкр
xк
Так как xк = const, критическое скольжение sкр зависит только от
сопротивления обмотки ротора R2 (R 2).
Обычно sкр = 0,1…0,2.
16.
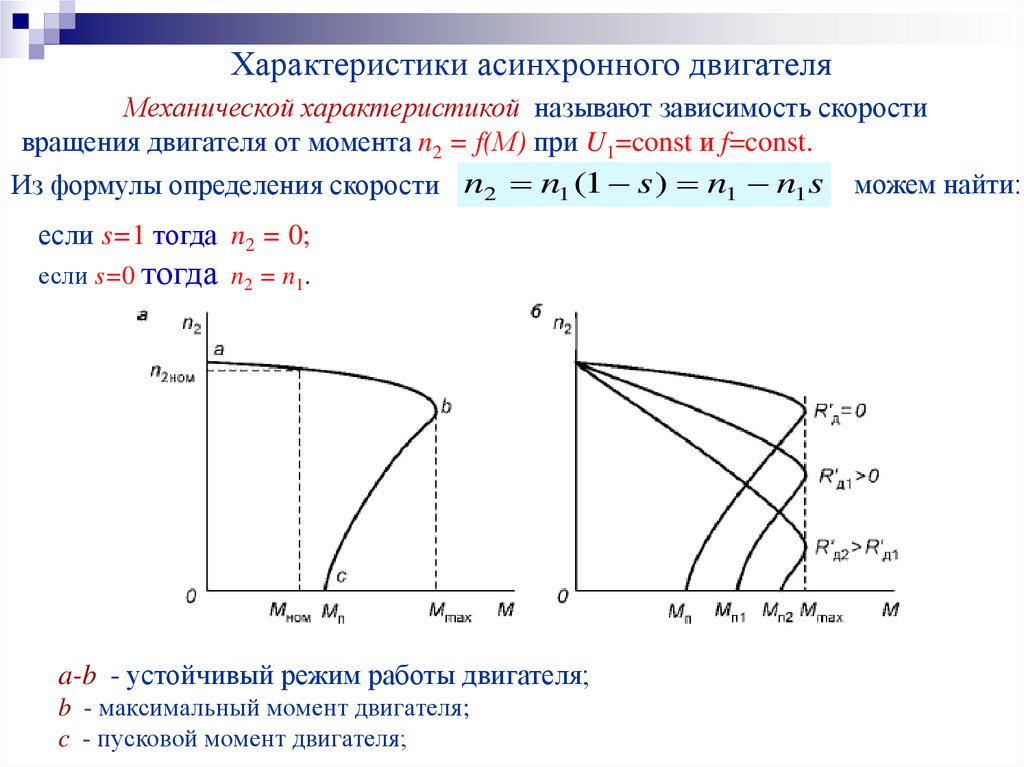
Характеристики асинхронного двигателяМеханической характеристикой называют зависимость скорости
вращения двигателя от момента n2 = f(М) при U1=const и f=const.
Из формулы определения скорости n2 n1 (1 s ) n1 n1 s можем найти:
если s=1 тогда n2 = 0;
если s=0 тогда n2 = n1.
a-b - устойчивый режим работы двигателя;
b - максимальный момент двигателя;
c - пусковой момент двигателя;
17.
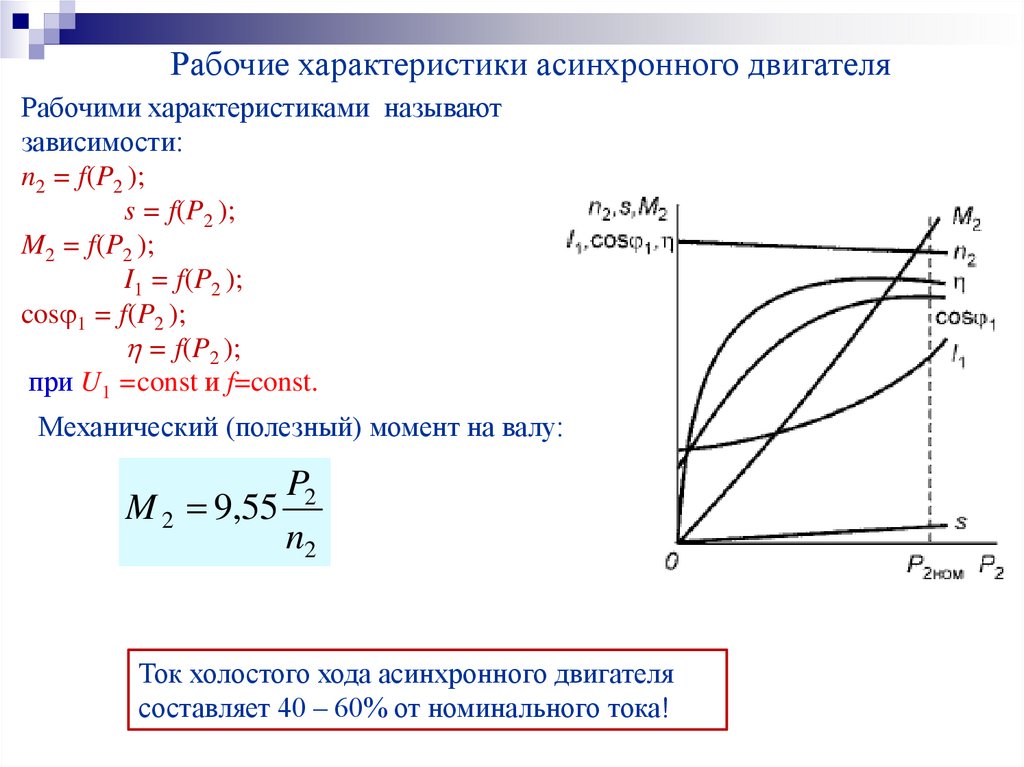
Рабочие характеристики асинхронного двигателяРабочими характеристиками называют
зависимости:
n2 = f(P2 );
s = f(P2 );
M2 = f(P2 );
I1 = f(P2 );
cos 1 = f(P2 );
= f(P2 );
при U1 =const и f=const.
Механический (полезный) момент на валу:
P2
M 2 9,55
n2
Ток холостого хода асинхронного двигателя
составляет 40 – 60% от номинального тока!
18.
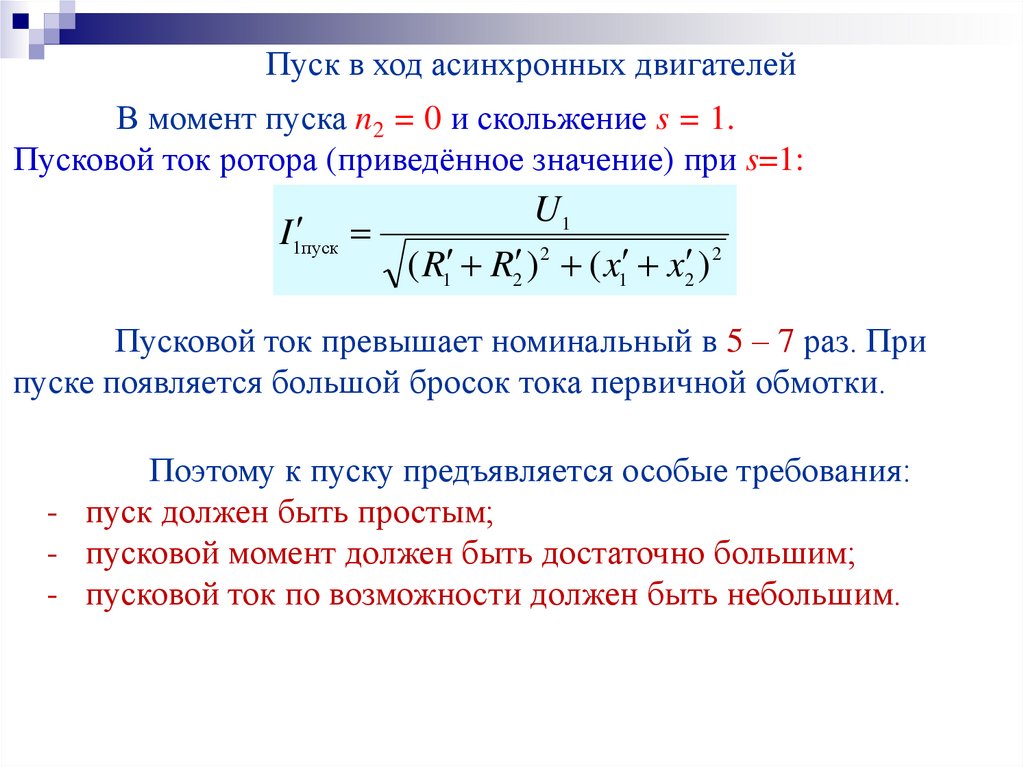
Пуск в ход асинхронных двигателейВ момент пуска n2 = 0 и скольжение s = 1.
Пусковой ток ротора (приведённое значение) при s=1:
I1 пуск
U1
( R1 R2 ) 2 ( x1 x 2 ) 2
Пусковой ток превышает номинальный в 5 – 7 раз. При
пуске появляется большой бросок тока первичной обмотки.
Поэтому к пуску предъявляется особые требования:
- пуск должен быть простым;
- пусковой момент должен быть достаточно большим;
- пусковой ток по возможности должен быть небольшим.
19.
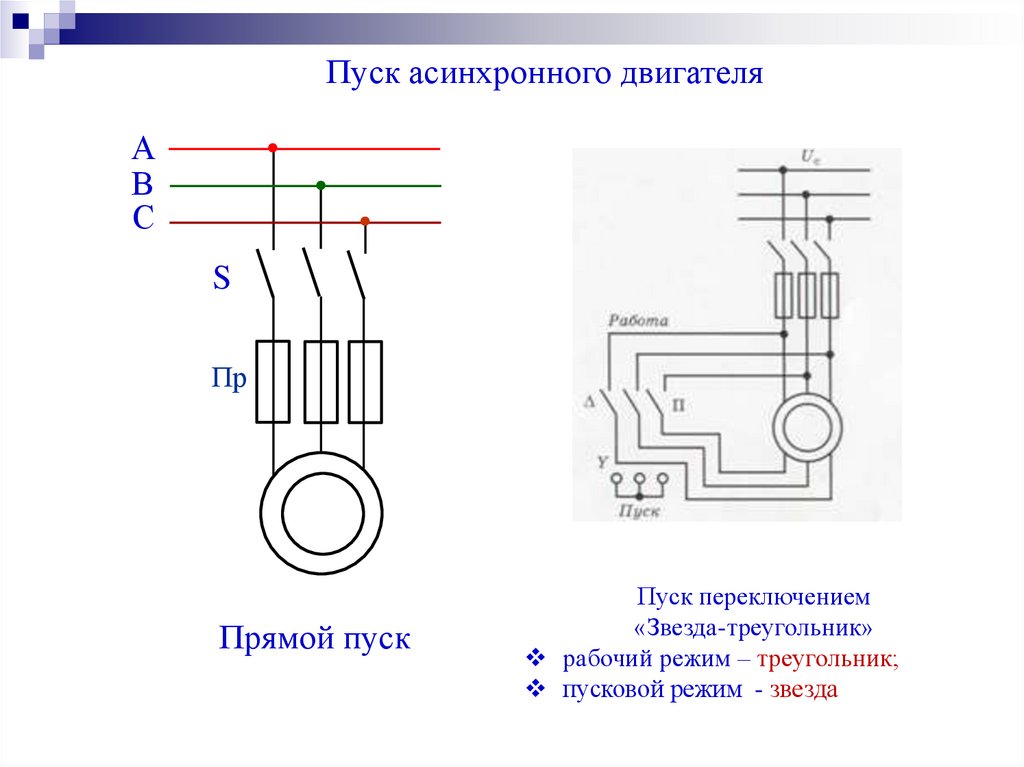
Пуск асинхронного двигателяА
В
С
S
Пр
Прямой пуск
Пуск переключением
«Звезда-треугольник»
рабочий режим – треугольник;
пусковой режим - звезда
20.
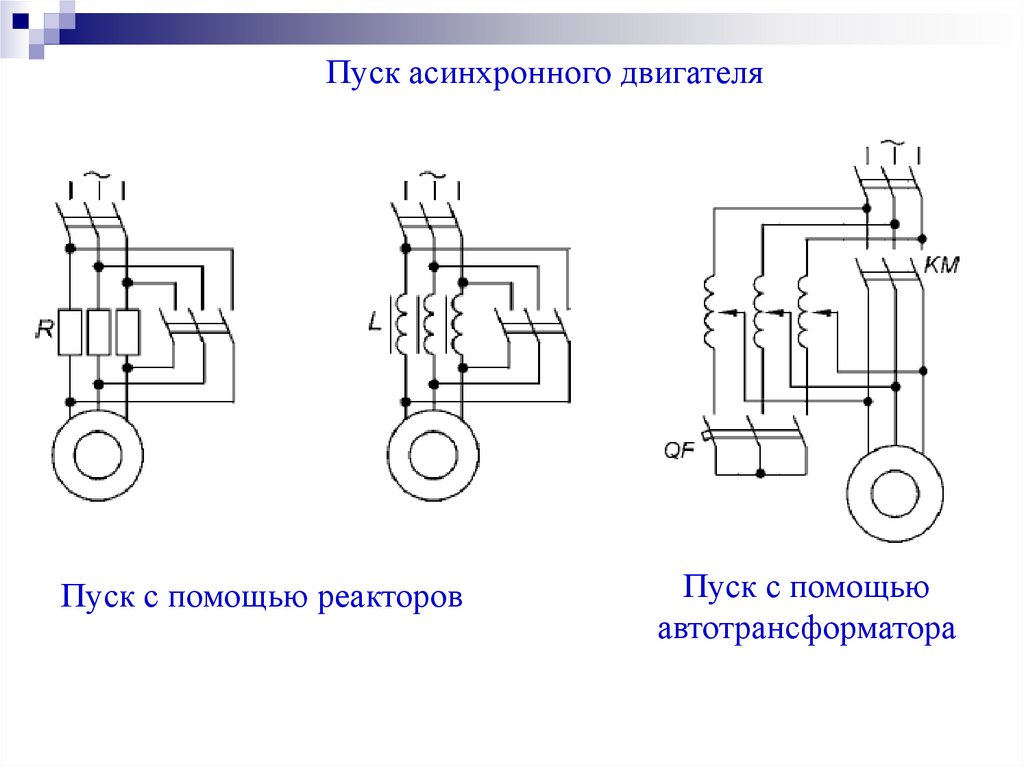
Пуск асинхронного двигателяПуск с помощью реакторов
Пуск с помощью
автотрансформатора
21.
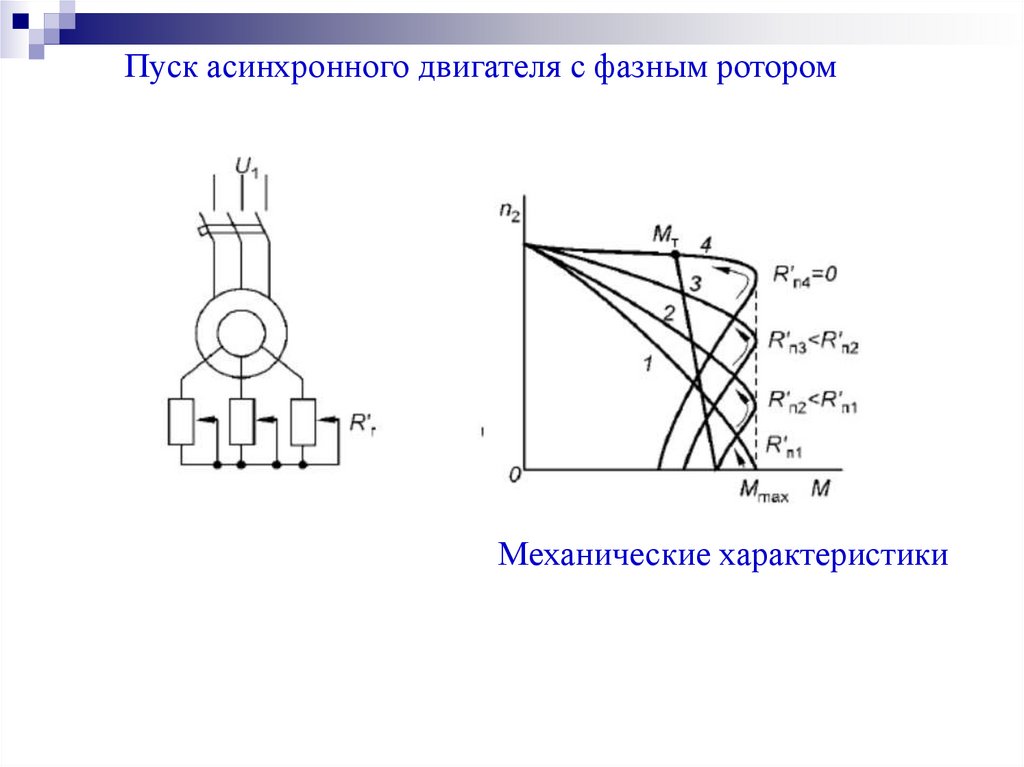
Пуск асинхронного двигателя с фазным роторомМеханические характеристики
22.
Регулирование скорости асинхронной машины с фазным роторомn2 n1 (1 s )
Регулирование скорости
скольжением
(с сопротивлениями в цепи ротора)
60 f
(1 s )
p
Механические характеристики
22
23.
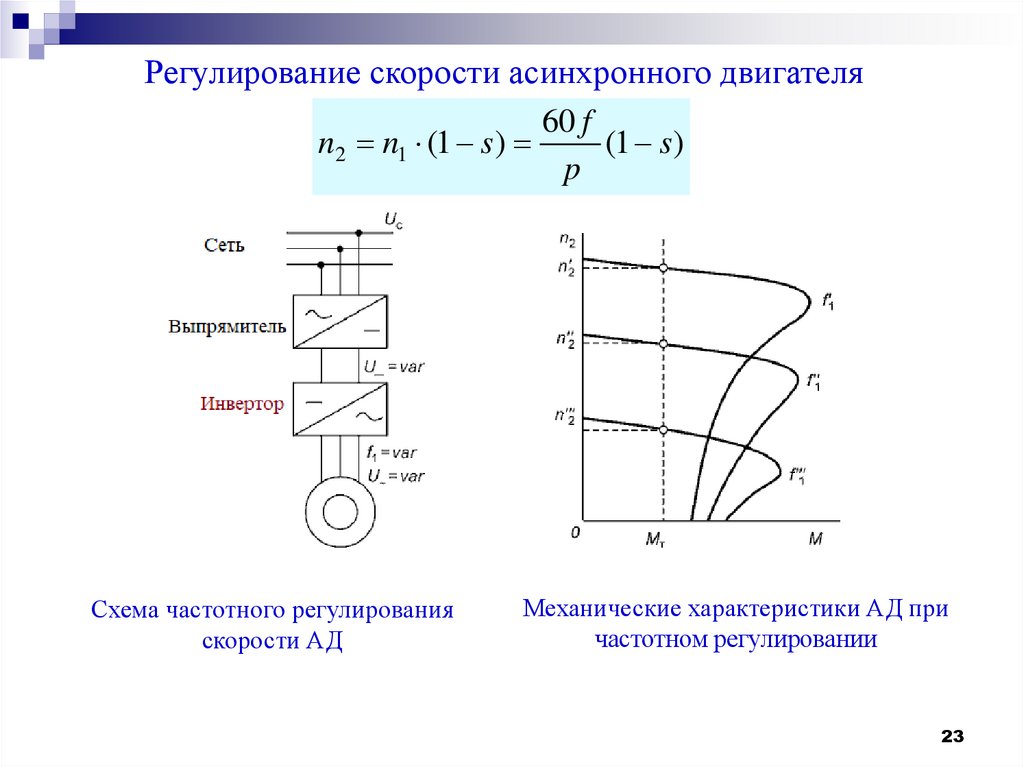
Регулирование скорости асинхронного двигателя60 f
n2 n1 (1 s )
(1 s )
p
Схема частотного регулирования
скорости АД
Механические характеристики АД при
частотном регулировании
23
24.
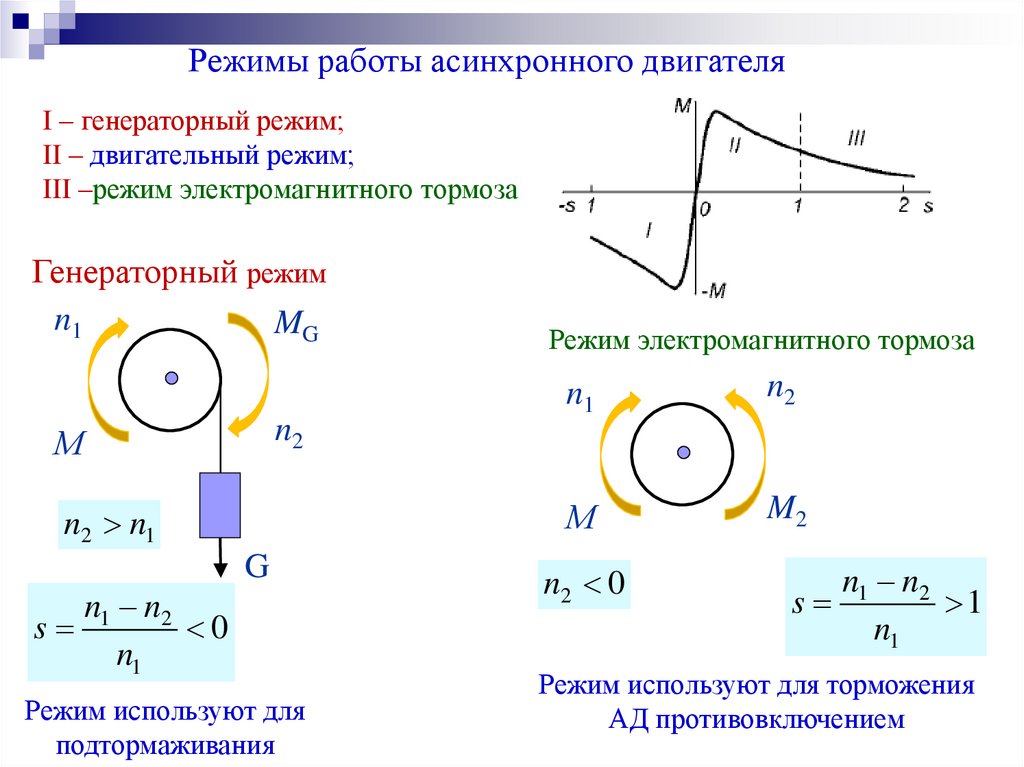
Режимы работы асинхронного двигателяI – генераторный режим;
II – двигательный режим;
III –режим электромагнитного тормоза
Генераторный режим
n1
MG
n2
М
n2 n1
n1 n2
s
0
n1
G
Режим используют для
подтормаживания
Режим электромагнитного тормоза
n1
n2
М
M2
n2 0
n1 n2
s
1
n1
Режим используют для торможения
АД противовключением
25.
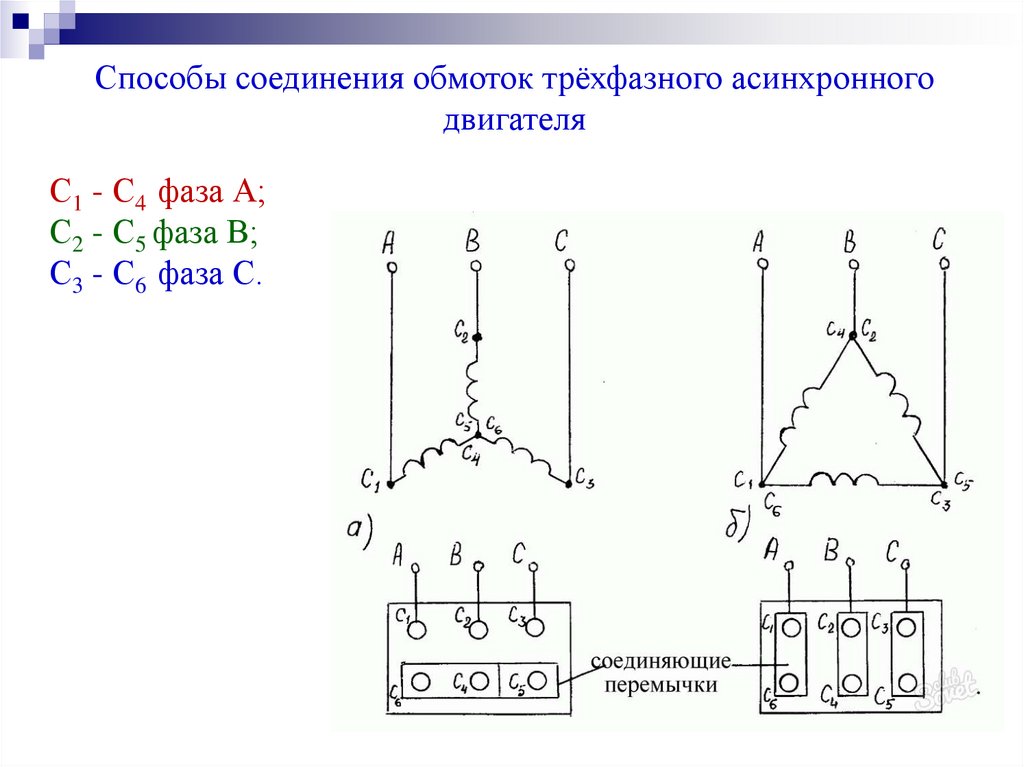
Способы соединения обмоток трёхфазного асинхронногодвигателя
С1 - С4 фаза А;
С2 - С5 фаза В;
С3 - С6 фаза С.
26.
Реверсирование (изменение направления вращения)асинхронного двигателя
Прямое чередование
А, В, С
Обратное чередование
А, С, В
Способы торможения асинхронного двигателя
Схема замещения асинхронного двигателя
Подготавливаем самостоятельно!!!
26