




 electronics
electronicsSimilar presentations:




")





Проектирование и моделирование мехатронных и робототехнических систем
1.
«Проектирование имоделирование мехатронных и
робототехнических систем»
Презентация к защите курсового проекта
Студента группы МК7-72Б
Пузановой М.Д.
2.
Цели и задачи• Постановка задачи разработки системы
• Разработка и создание 3D модели
• Моделирование модели в среде MATLAB
3.
Задачи разработки системы• Возможность ограничения постоянного доступа к корму
• Контроль за размером порции
• Достаточное
количество
автоматического кормления
• Кормление по таймеру
корма
для
длительного
4.
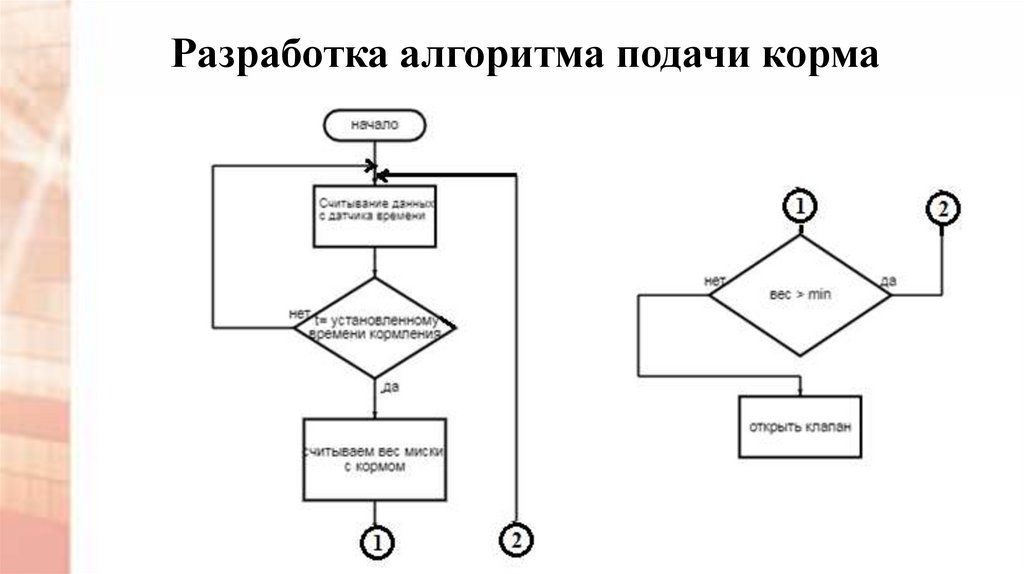
Разработка алгоритма подачи корма5.
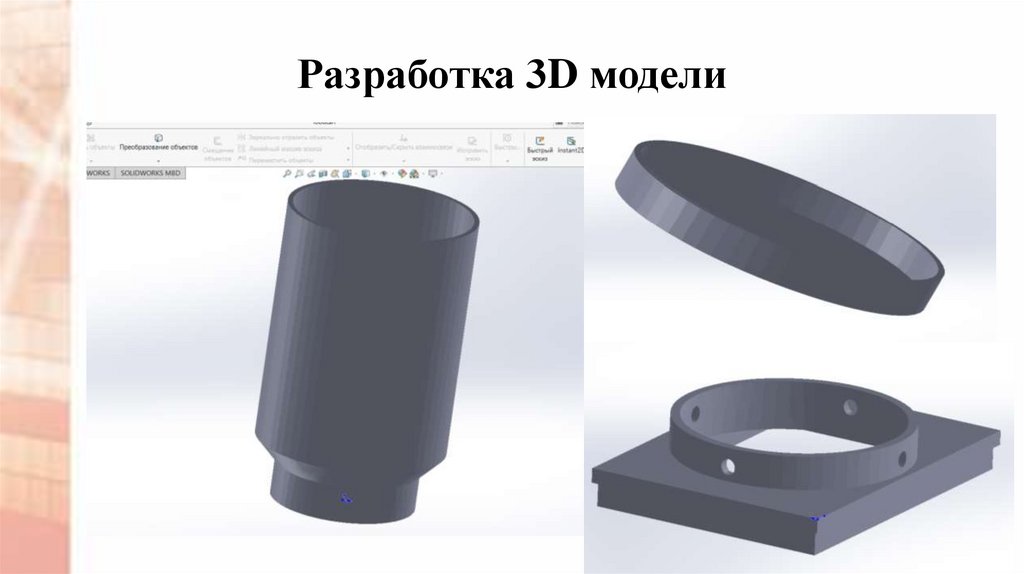
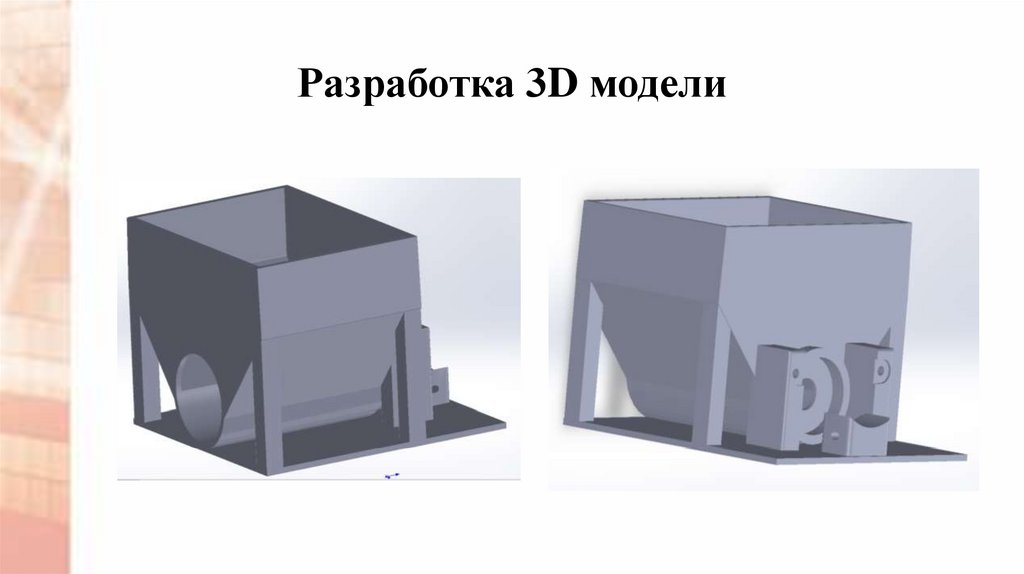
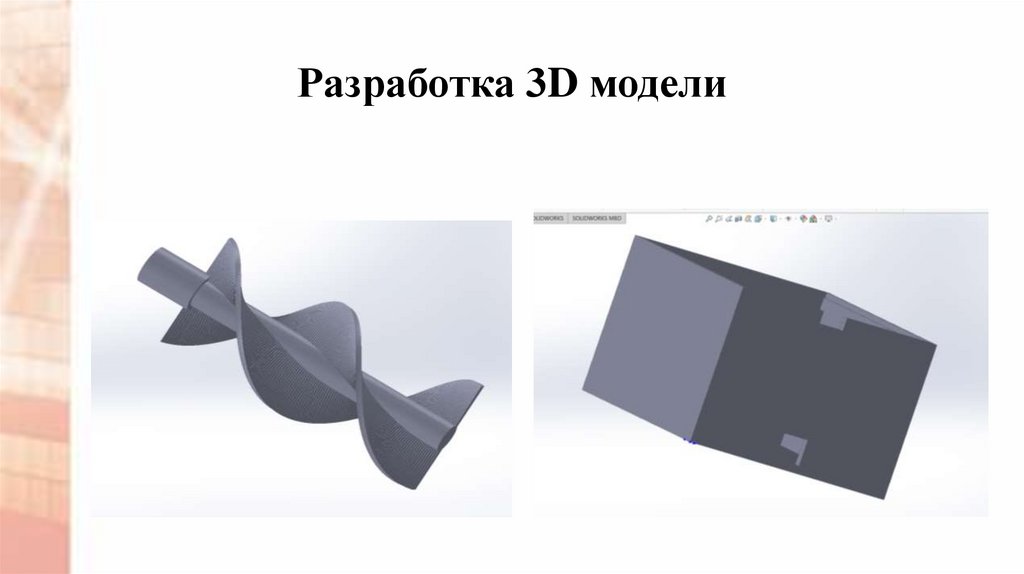
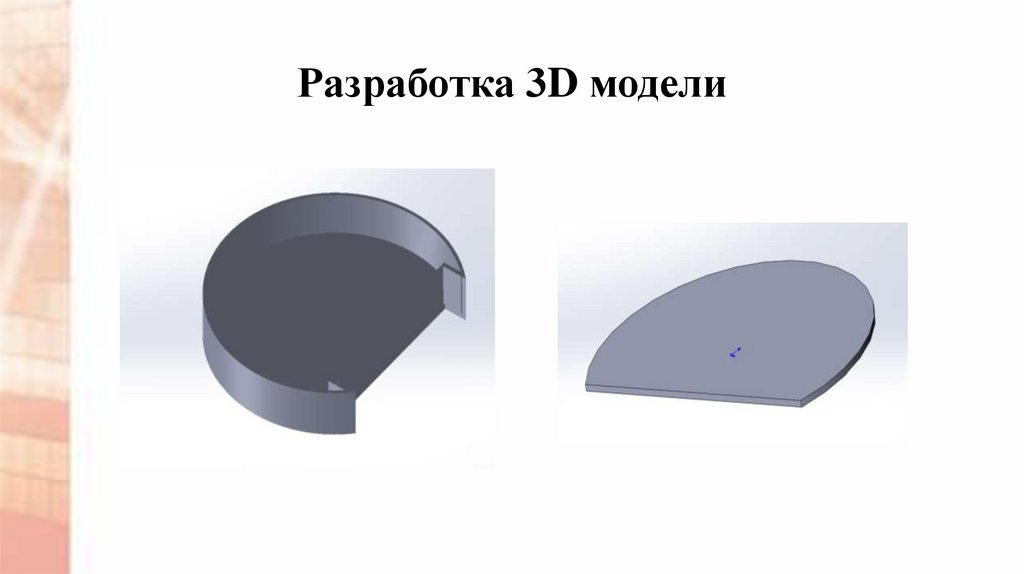
Разработка 3D моделиТаким образом, необходимо создать 3D модель кормушки,
состоящую из:
• Контейнера для хранения корма
• Емкость для приема корма
• Шнека для подачи корма
• Миски с двойным дном, позволяющим добавить весовой датчик
• Крышки, закрывающей миску
6.
Разработка 3D модели7.
Разработка 3D модели8.
Разработка 3D модели9.
Разработка 3D модели10.
Разработка 3D модели11.
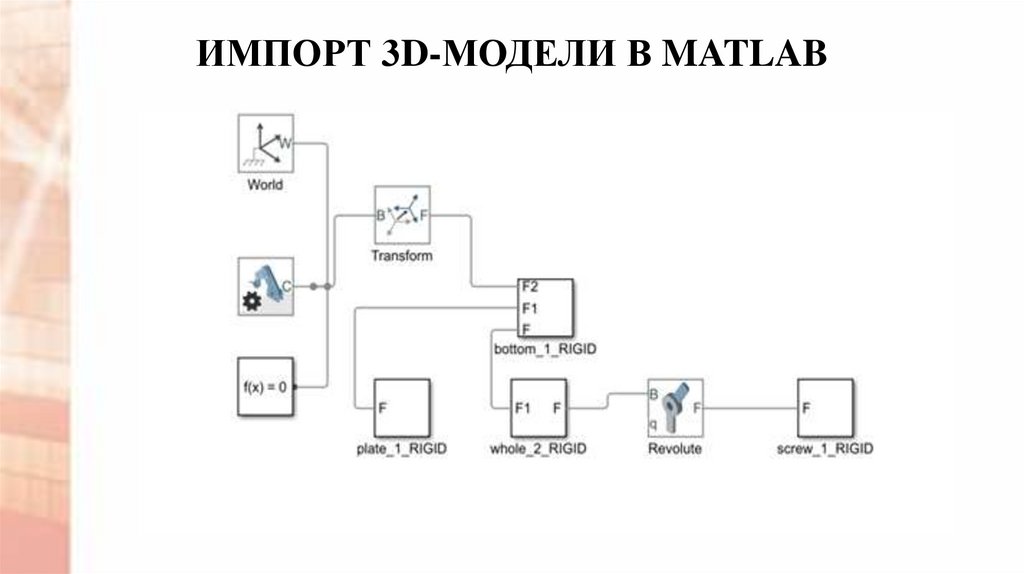
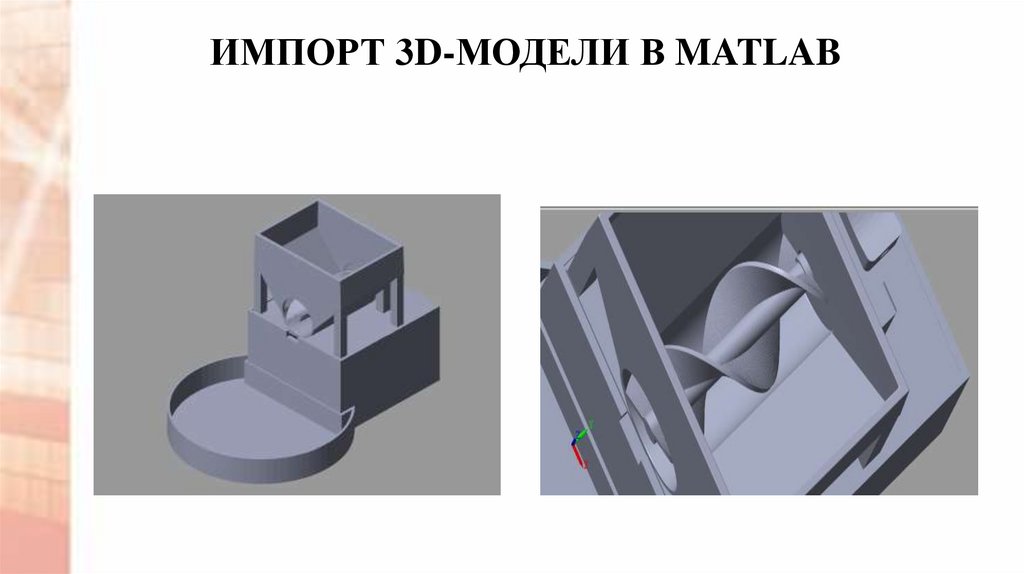
ИМПОРТ 3D-МОДЕЛИ В MATLAB12.
ИМПОРТ 3D-МОДЕЛИ В MATLAB13.
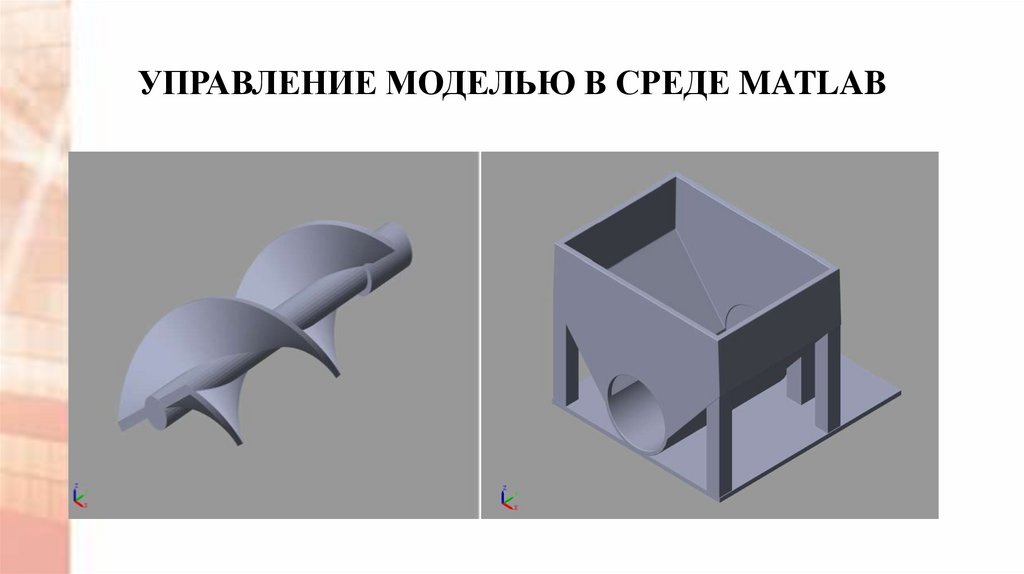
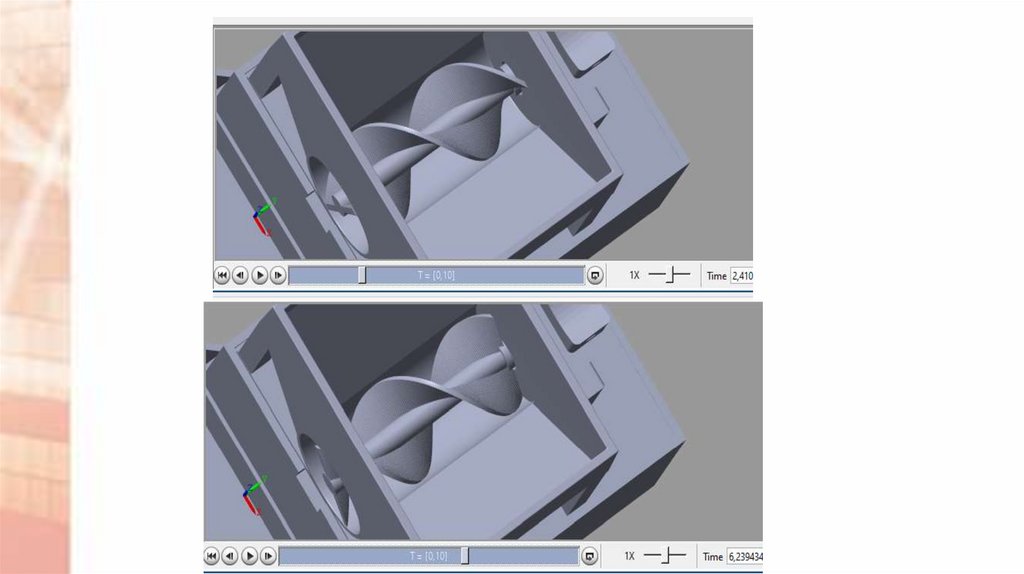
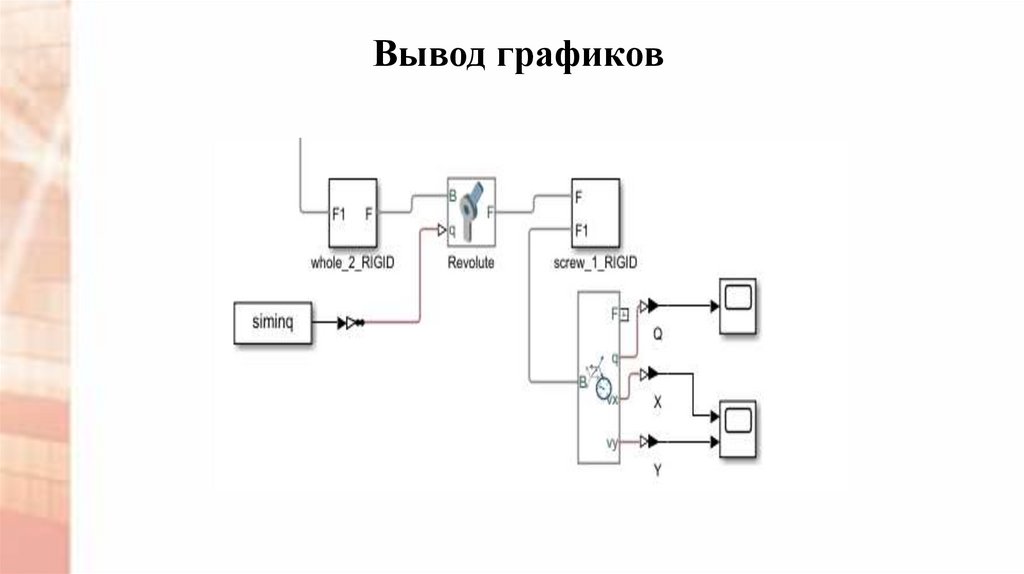
УПРАВЛЕНИЕ МОДЕЛЬЮ В СРЕДЕ MATLABДобавление управляющего файла