 electronics
electronicsSimilar presentations:










Методы и технологии интеллектуального управления многозвенными роботами-манипуляторами на основе нейро-нечетких моделей
1.
ПНИ «Технологии 4.0 для промышленности и робототехника».Секция проекта 11 «Робототехника»
«Методы и технологии интеллектуального управления
многозвенными роботами-манипуляторами на основе нейро-нечетких моделей»
ПНИ 20/22-0000028/47
Этап III, декабрь 2021 г.
Состав проектной группы:
Борисов Вадим Владимирович, д.т.н., профессор
Произошла замена участника c: Луферов Виктор Сергеевич, аспирант
на: Жарков Антон Павлович, аспирант
Соколов Андрей Максимович, А-02м-20
1
2.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
Описание:
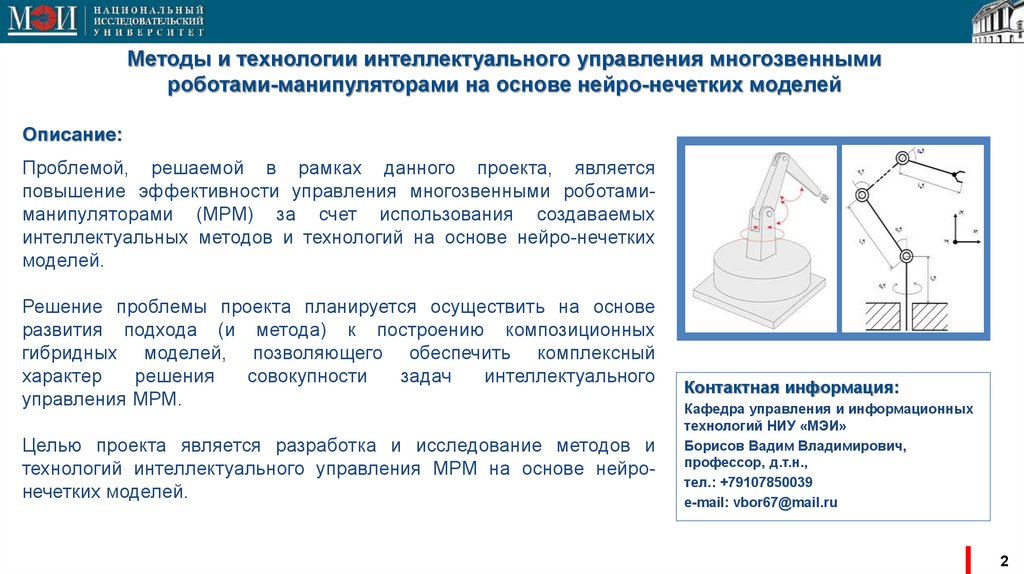
Проблемой, решаемой в рамках данного проекта, является
повышение эффективности управления многозвенными роботамиманипуляторами (МРМ) за счет использования создаваемых
интеллектуальных методов и технологий на основе нейро-нечетких
моделей.
Решение проблемы проекта планируется осуществить на основе
развития подхода (и метода) к построению композиционных
гибридных моделей, позволяющего обеспечить комплексный
характер
решения
совокупности
задач
интеллектуального
управления МРМ.
Целью проекта является разработка и исследование методов и
технологий интеллектуального управления МРМ на основе нейронечетких моделей.
Контактная информация:
Кафедра управления и информационных
технологий НИУ «МЭИ»
Борисов Вадим Владимирович,
профессор, д.т.н.,
тел.: +79107850039
e-mail: vbor67@mail.ru
2
3.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
Технические характеристики:
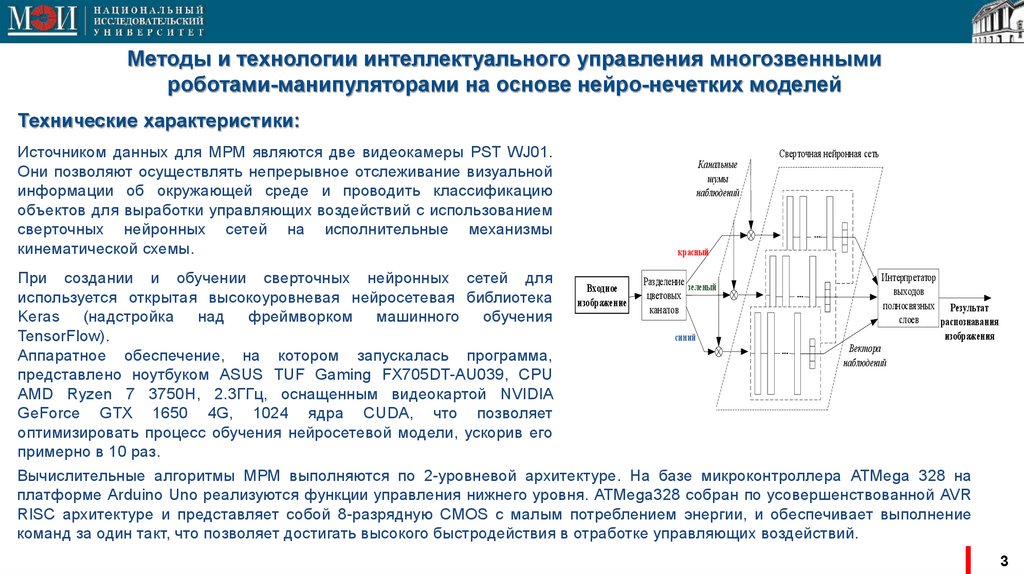
Источником данных для МРМ являются две видеокамеры PST WJ01.
Они позволяют осуществлять непрерывное отслеживание визуальной
информации об окружающей среде и проводить классификацию
объектов для выработки управляющих воздействий с использованием
сверточных нейронных сетей на исполнительные механизмы
кинематической схемы.
Канальные
шумы
наблюдений
Сверточная нейронная сеть
красный
Интерпретатор
При создании и обучении сверточных нейронных сетей для
Разделение зеленый
Входное
выходов
цветовых
используется открытая высокоуровневая нейросетевая библиотека
изображение
полносвязных
Результат
каналов
Keras (надстройка над фреймворком машинного обучения
слоев
распознавания
изображения
синий
TensorFlow).
Вектора
Аппаратное обеспечение, на котором запускалась программа,
наблюдений
представлено ноутбуком ASUS TUF Gaming FX705DT-AU039, CPU
AMD Ryzen 7 3750H, 2.3ГГц, оснащенным видеокартой NVIDIA
GeForce GTX 1650 4G, 1024 ядра CUDA, что позволяет
оптимизировать процесс обучения нейросетевой модели, ускорив его
примерно в 10 раз.
Вычислительные алгоритмы МРМ выполняются по 2-уровневой архитектуре. На базе микроконтроллера ATMega 328 на
платформе Arduino Uno реализуются функции управления нижнего уровня. ATMega328 собран по усовершенствованной AVR
RISC архитектуре и представляет собой 8-разрядную CMOS с малым потреблением энергии, и обеспечивает выполнение
команд за один такт, что позволяет достигать высокого быстродействия в отработке управляющих воздействий.
3
4.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
Эффект от реализации проекта:
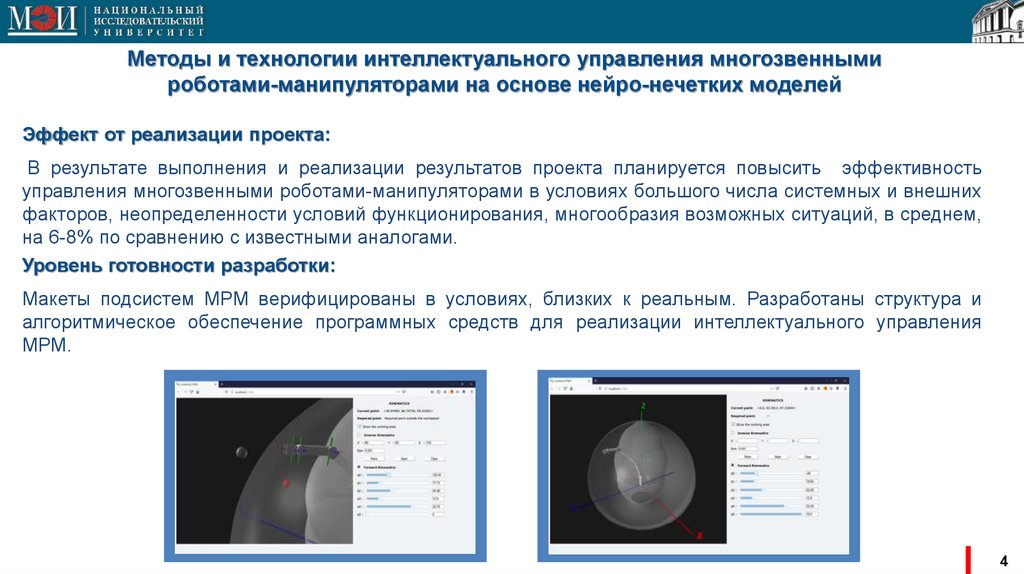
В результате выполнения и реализации результатов проекта планируется повысить эффективность
управления многозвенными роботами-манипуляторами в условиях большого числа системных и внешних
факторов, неопределенности условий функционирования, многообразия возможных ситуаций, в среднем,
на 6-8% по сравнению с известными аналогами.
Уровень готовности разработки:
Макеты подсистем МРМ верифицированы в условиях, близких к реальным. Разработаны структура и
алгоритмическое обеспечение программных средств для реализации интеллектуального управления
МРМ.
4
5.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
Задачи, поставленные для достижения конечного результата:
- предложить метод интеллектуального управления МРМ на основе создаваемых гибридных моделей;
- разработать способы для реализации различных стратегий применения предлагаемого метода интеллектуального управления
МРМ;
- разработать структуру программных средств интеллектуального управления МРМ.
- разработать алгоритмическое и программное обеспечение для интеллектуального управления МРМ на основе предлагаемых
моделей и метода;
- создать информационную технологию интеллектуального управления многозвенными роботами-манипуляторами на основе
нейро-нечетких моделей;
- разработать имитационную модель МРМ с интерфейсом, реализующим предлагаемые модели, метод и технологию
интеллектуального управления МРМ;
- провести экспериментальные исследования и оценку эффективности интеллектуального управления МРМ на основе
предлагаемых моделей, метода и технологии;
- выполнить функционально-стоимостный анализ, провести технико-экономическое обоснование и определить экономическе
условия, при которых предлагаемые методы и технологии интеллектуального управления МРМ обеспечивают достижение в
эксплуатации высоких финансовых показателей;
- разработать технические требования для создания и развития новой информационной технологии интеллектуального
управления МРМ на основе полученных результатов;
- подать заявки и получить свидетельства о государственной регистрации программ для ЭВМ, характеризующих правовую
охрану создаваемых программных средств, реализующих разрабатываемое научно-методическое, алгоритмическое и
информационное обеспечение;
- подать заявки на изобретение и получение патента на способ и устройство интеллектуального управления последовательными
МРМ.
5
6.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
Необходимость привлечения партнеров для завершения разработки:
У коллектива имеется доступ к объектам научной инфраструктуры «МЭИ-Фесто», необходимым для успешной
реализации проекта.
Для завершения разработки индустриальный партнер (ООО «НИИМАШ») выразил готовность предоставления
творческому коллективу производственных мощностей и ресурсов испытательного полигона для реализации проекта и
развития имеющихся научных заделов, что подтверждается соответствующим письмом-обоснованием, подписанным
руководителем этой организации.
Потенциальные потребители создаваемой продукции:
Конечными потребителями результатов данного проекта могут являться различные киберфизические системы и
объекты, предназначенные для обеспечения и повышения качества, безопасности жизни и здоровья людей, в том числе
функционирующие в опасных и непригодных для пребывания человека условиях, характеризующихся высоким уровнем
радиационного, биологического и химического заражения, позволяющие снизить физическую нагрузку на людей и риски
их пребывания в опасных зонах.
Конкретную заинтересованность в результатах данного проекта выразили руководство и специалисты одного из ведущих
региональных предприятий (ООО НИИМАШ) в сфере производства промышленного металлообрабатывающего
оборудования.
6
7.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
Описание важных научно-технических результатов по проекту:
В результате выполнения проекта будет решена проблема повышения эффективности управления МРМ за счет использования
создаваемых интеллектуальных методов и технологий на основе нейро-нечетких моделей.
Для решения проблемы будет развит подход и предложен основанный на нем метод построения композиционных гибридных моделей для
обеспечения комплексного решения совокупности задач интеллектуального управления МРМ.
Создаваемая новая композиционная гибридная модель ориентирована на решение согласованной совокупности задач интеллектуального
управления МРМ, и включает в себя: многокомпонентную модель для анализа каждой стадии процессов функционирования и управления
МРМ; нейро-нечеткие модели для интеллектуального управления каждой стадией функционирования МРМ; нейро-нечеткие модели для
оценки эффективности и рисков управления на каждой стадии функционирования МРМ; нейро-нечеткие модели для обобщенной оценки
эффективности и рисков управления МРМ в целом.
Совершенствуемый способ решения системы дифференциальных уравнений с нечеткими параметрами для моделирования процессов
управления РМ использует предлагаемую нечеткую реализацию численного метода Гаусса–Ньютона, а также, в отличие от известных
подходов к нечетким вычислениям, обеспечивает невозрастание неопределенности при осуществлении массовых вычислений, а также
повышенную оперативность расчетов при использовании разработанной многокомпонентной модели для анализа каждой стадии
процессов функционирования и управления МРМ.
Новизна модифицируемых способов построения, структурно-параметрической настройки и использования нейросетевых и нейро-нечетких
моделей в составе композиционной гибридной модели основывается на учете характеристических особенностей оценки эффективности и
рисков управления МРМ.
Новизна предлагаемого метода интеллектуального управления МРМ обосновывается использованием для его реализации оригинальной
разрабатываемой композиционной гибридной модели, а также комплексным оцениванием эффективности и рисков управления МРМ.
7
8.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
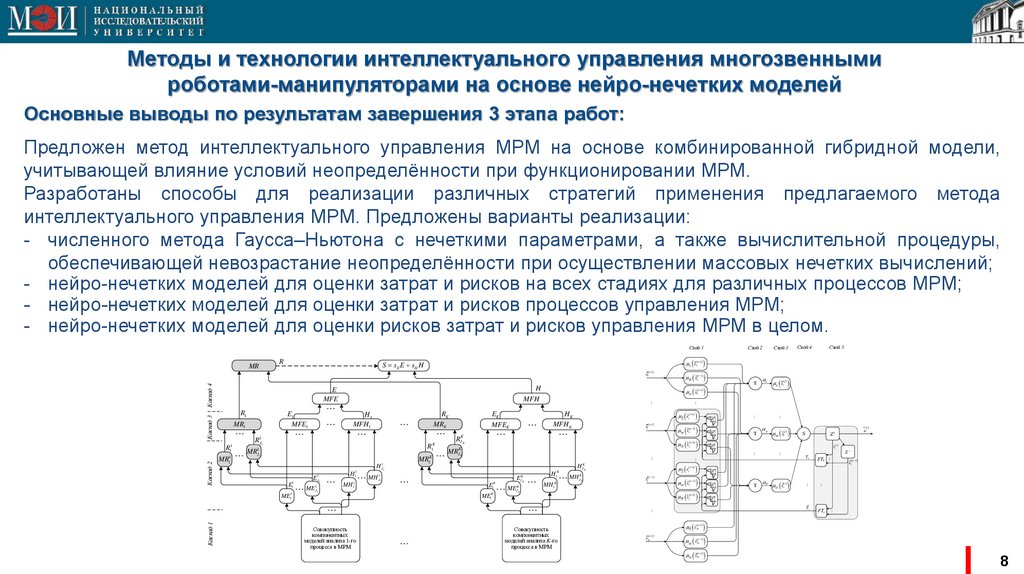
Основные выводы по результатам завершения 3 этапа работ:
Предложен метод интеллектуального управления МРМ на основе комбинированной гибридной модели,
учитывающей влияние условий неопределённости при функционировании МРМ.
Разработаны способы для реализации различных стратегий применения предлагаемого метода
интеллектуального управления МРМ. Предложены варианты реализации:
- численного метода Гаусса–Ньютона с нечеткими параметрами, а также вычислительной процедуры,
обеспечивающей невозрастание неопределённости при осуществлении массовых нечетких вычислений;
- нейро-нечетких моделей для оценки затрат и рисков на всех стадиях для различных процессов МРМ;
- нейро-нечетких моделей для оценки затрат и рисков процессов управления МРМ;
- нейро-нечетких моделей для оценки рисков затрат и рисков управления МРМ в целом.
Слой 1
H
Каскад 3
...
...
...
...
R1J1
R1K
1
E
T
p
...
MEJKK
H1K . . .
MH1K
H JKK
MH
K
JK
t
si t
s
si
t
M
t 1
T
i
T1
FT1
si
t
M sN t 1
H sN t 1
FT
...
T
t 1
H si t
Z
L sN t 1
sN
... P
si
Z0
S
L si t 1
H si t 1
Совокупность
компонентных
моделей анализа K-го
процесса в МРМ
M si t
...
E1K . . .
K
JK
...
...
...
Совокупность
компонентных
моделей анализа 1-го
процесса в МРМ
M si t 1
H si t 1
K
. . . MRJ K
ME1K
...
L si t 1
...
...
...
...
MH
1
J1
t 1
Слой 5
L si t
...
MH11
H 1J1
...
RJKK
si
1
...
ME11
...
ME1J1
H11 . . .
MR
HK
MFH K
T
...
E
E11 . . .
1
J1
K
1
...
...
. . . MRJ1
EK
MFEK
Слой 4
...
...
...
RK
MRK
...
MR1
MR
MFH
H1
MFH1
Слой 3
...
E1
MFE1
Слой 2
M s1 t 1
H s1 t 1
...
R1
1
1
t 1
...
Каскад 2
s1
E
MFE
R11
Каскад 1
L s1 t 1
S sE E sH H
Каскад 4
MR
R
8
9.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
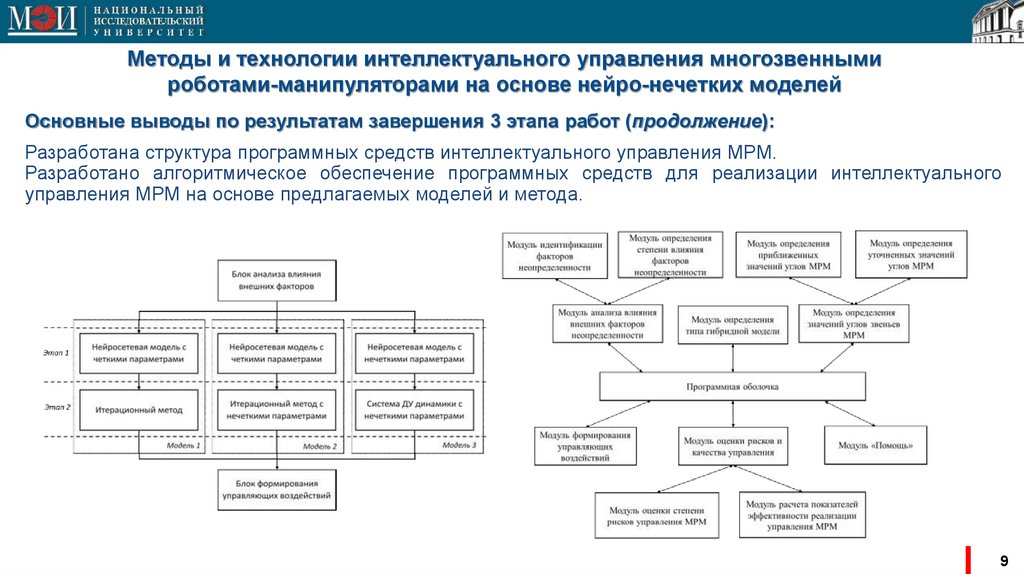
Основные выводы по результатам завершения 3 этапа работ (продолжение):
Разработана структура программных средств интеллектуального управления МРМ.
Разработано алгоритмическое обеспечение программных средств для реализации интеллектуального
управления МРМ на основе предлагаемых моделей и метода.
9
10.
Методы и технологии интеллектуального управления многозвеннымироботами-манипуляторами на основе нейро-нечетких моделей
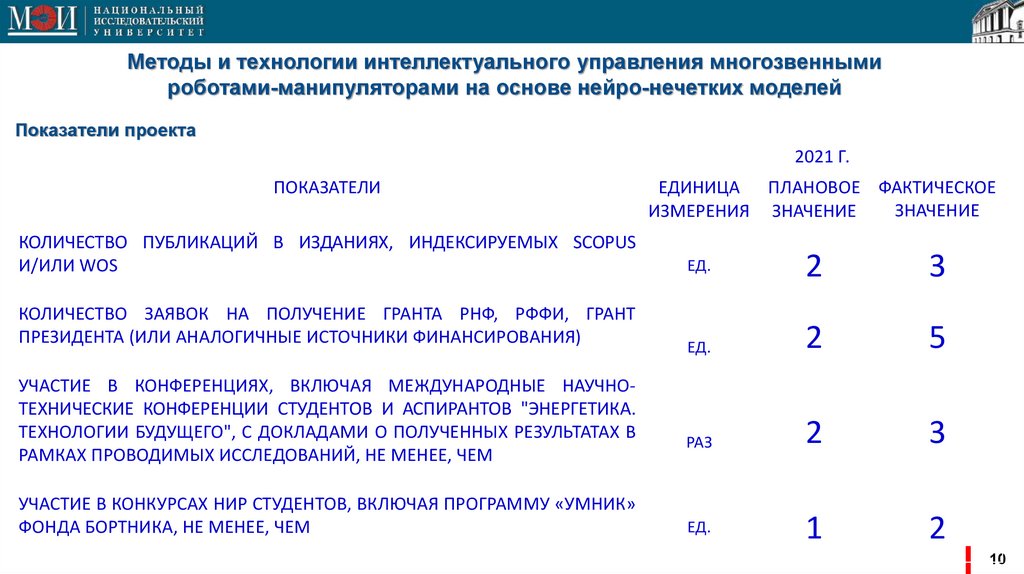
Показатели проекта
2021 Г.
ПОКАЗАТЕЛИ
КОЛИЧЕСТВО ПУБЛИКАЦИЙ В ИЗДАНИЯХ, ИНДЕКСИРУЕМЫХ SCOPUS
И/ИЛИ WOS
КОЛИЧЕСТВО ЗАЯВОК НА ПОЛУЧЕНИЕ ГРАНТА РНФ, РФФИ, ГРАНТ
ПРЕЗИДЕНТА (ИЛИ АНАЛОГИЧНЫЕ ИСТОЧНИКИ ФИНАНСИРОВАНИЯ)
УЧАСТИЕ В КОНФЕРЕНЦИЯХ, ВКЛЮЧАЯ МЕЖДУНАРОДНЫЕ НАУЧНОТЕХНИЧЕСКИЕ КОНФЕРЕНЦИИ СТУДЕНТОВ И АСПИРАНТОВ "ЭНЕРГЕТИКА.
ТЕХНОЛОГИИ БУДУЩЕГО", С ДОКЛАДАМИ О ПОЛУЧЕННЫХ РЕЗУЛЬТАТАХ В
РАМКАХ ПРОВОДИМЫХ ИССЛЕДОВАНИЙ, НЕ МЕНЕЕ, ЧЕМ
УЧАСТИЕ В КОНКУРСАХ НИР СТУДЕНТОВ, ВКЛЮЧАЯ ПРОГРАММУ «УМНИК»
ФОНДА БОРТНИКА, НЕ МЕНЕЕ, ЧЕМ
ЕДИНИЦА ПЛАНОВОЕ ФАКТИЧЕСКОЕ
ЗНАЧЕНИЕ
ИЗМЕРЕНИЯ ЗНАЧЕНИЕ
2
3
ЕД.
2
5
РАЗ
2
3
1
2
ЕД.
ЕД.
10
11.
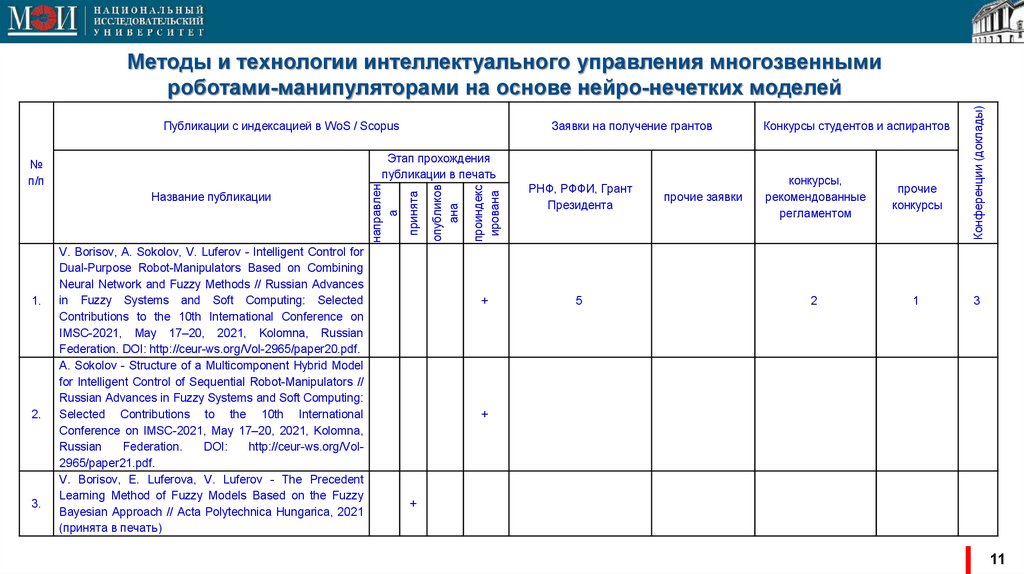
Публикации с индексацией в WoS / Scopus2.
3.
опубликов
ана
проиндекс
ирована
V. Borisov, A. Sokolov, V. Luferov - Intelligent Control for
Dual-Purpose Robot-Manipulators Based on Combining
Neural Network and Fuzzy Methods // Russian Advances
in Fuzzy Systems and Soft Computing: Selected
Contributions to the 10th International Conference on
IMSC-2021, May 17–20, 2021, Kolomna, Russian
Federation. DOI: http://ceur-ws.org/Vol-2965/paper20.pdf.
A. Sokolov - Structure of a Multicomponent Hybrid Model
for Intelligent Control of Sequential Robot-Manipulators //
Russian Advances in Fuzzy Systems and Soft Computing:
Selected Contributions to the 10th International
Conference on IMSC-2021, May 17–20, 2021, Kolomna,
Russian
Federation.
DOI:
http://ceur-ws.org/Vol2965/paper21.pdf.
V. Borisov, E. Luferova, V. Luferov - The Precedent
Learning Method of Fuzzy Models Based on the Fuzzy
Bayesian Approach // Acta Polytechnica Hungarica, 2021
(принята в печать)
принята
Название публикации
направлен
а
Этап прохождения
публикации в печать
№
п/п
1.
Заявки на получение грантов
РНФ, РФФИ, Грант
Президента
+
5
прочие заявки
Конкурсы студентов и аспирантов
конкурсы,
рекомендованные
регламентом
прочие
конкурсы
2
1
Конференции (доклады)
Методы и технологии интеллектуального управления многозвенными
роботами-манипуляторами на основе нейро-нечетких моделей
3
+
+
11