
 physics
physicsSimilar presentations:










Управление моторами
1.
Управление моторами2.
4 основных компонента автоматического управления спомощью обратной связью:
- управляемая система – то, чем мы хотим управлять;
- цель управления – то, чего мы хотим достичь при
помощи управления;
- список измеряемых переменных – то, что мы можем
измерять;
- список управляющих переменных – то, что мы
можем менять для воздействия на объект
управления
3.
Регулятор – устройство,обеспечивающее поддержание
системы в желаемом устойчивом
состоянии
4.
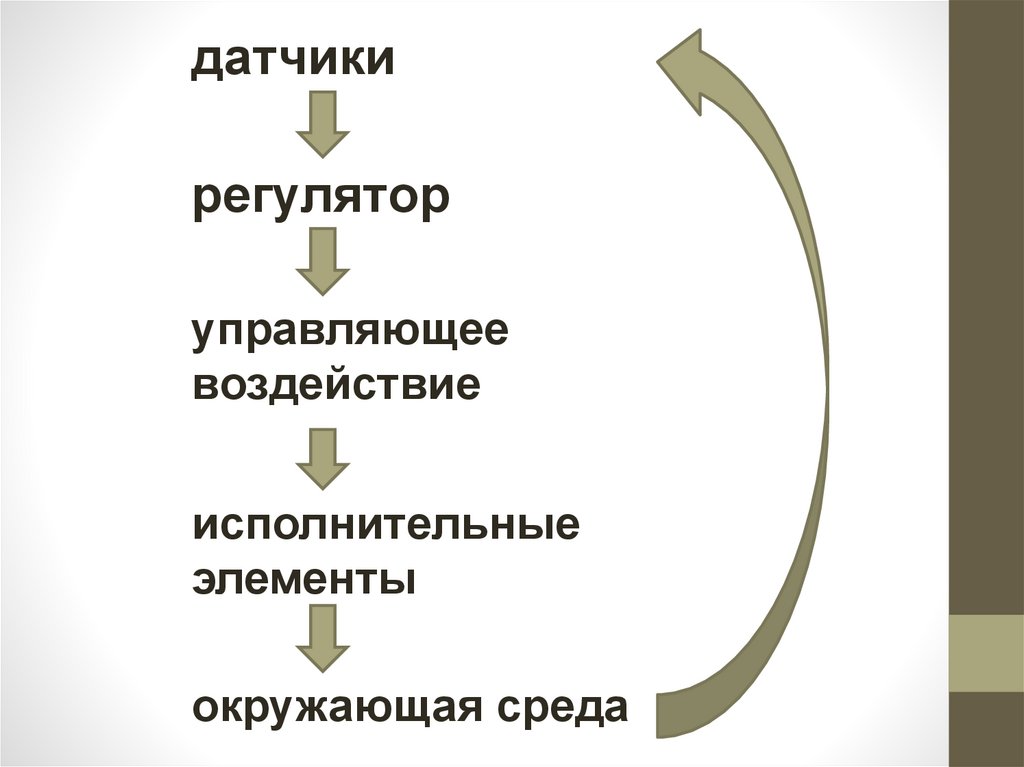
датчикирегулятор
управляющее
воздействие
исполнительные
элементы
окружающая среда
5.
6.
Релейным регулятором называетсярегулятор, у которого регулирующий орган
под действием сигнала от датчика может
принимать одно из двух крайних положений.
7.
е = хо-хошибка рассчитывается как разница в показании
датчика между желаемым показанием и реальным
u = k*e
чтобы выработать управляющее воздействие нужно
умножить ошибку на некоторый усиливающий
коэффициент
8.
9.
Исполнительный орган – два колеса, подключенныек моторам
Регулируемая величина – положение датчика света
на границе черного и белого
Возмущающее воздействие – движение робота
вперед, которое приводит к отклонению от границы
10.
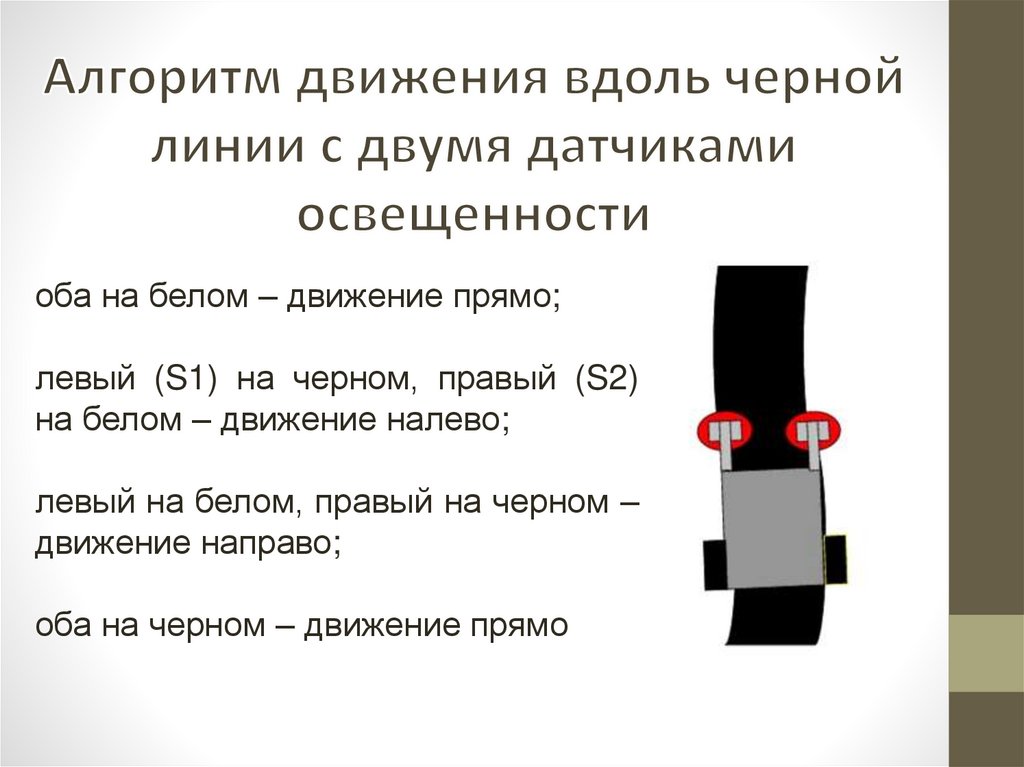
оба на белом – движение прямо;левый (S1) на черном, правый (S2)
на белом – движение налево;
левый на белом, правый на черном –
движение направо;
оба на черном – движение прямо
11.
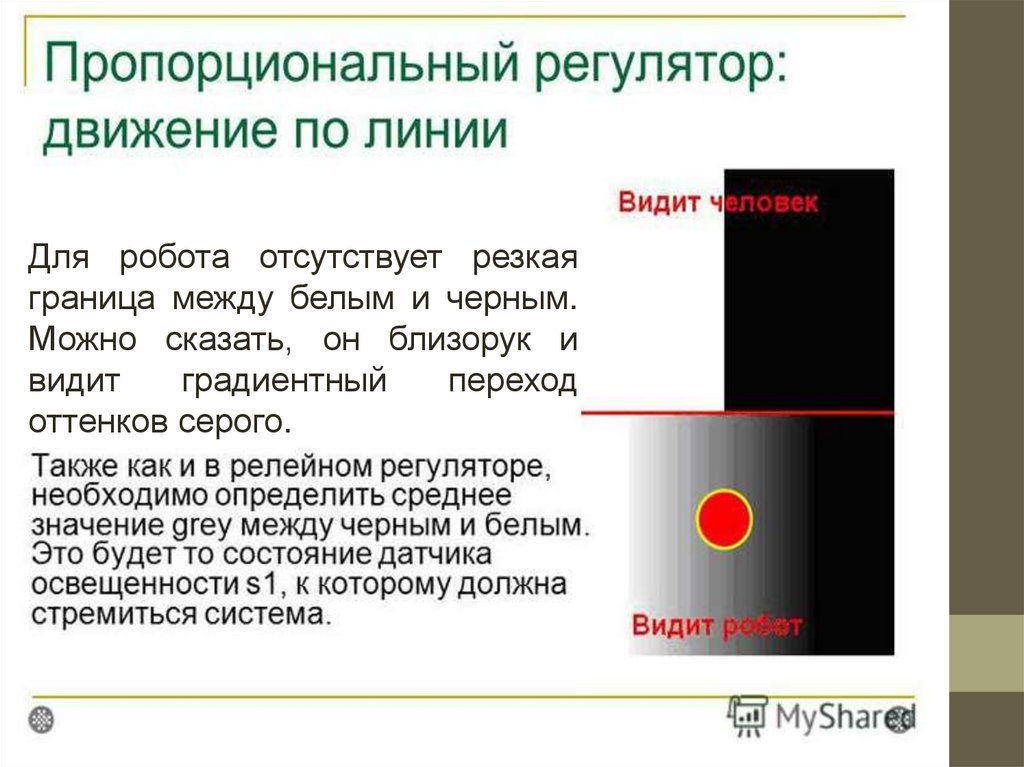
Для робота отсутствует резкаяграница между белым и черным.
Можно сказать, он близорук и
видит
градиентный
переход
оттенков серого.