

 physics
physicsSimilar presentations:










Микропроцессорные системы управления. Основные понятия
1.
Микропроцессорные системыуправления
Основные понятия
2.
Понятие физического процессаФизический процесс — это последовательная смена состояний объектов физического
мира.
Физическими процессами являются:
• движение;
• химические реакции;
• теплообмен и т.д.
Примеры процессов:
• производство – промышленное, химическое и т.д.
• климат-контроль – изменение физических параметров, например,
температуры и влажности.
• круиз-контроль – то есть управляемое изменение скорости и положения
транспортного средства.
Немецкий технический стандарт DIN 66201
определяет физический процесс как: "комбинации связанных событий в системе, в
результате которых
• изменяются,
• перемещаются или
• запасаются материя, энергия и информация".
Физический процесс не обязательно должен управляться извне.
Любой физический процесс характеризуется входом и выходом в виде:
• материальных компонентов;
• энергии;
• информации.
3.
Понятие технического процессаТехнический процесс – это физический процесс, параметры которого можно
измерить и изменить техническими средствами.
Технический процесс включает обработку информации для достижения заданной
целевой функции.
Обработка информации сама по себе не привносит видимых изменений в
физический мир и, таким образом, не может быть отнесена к физическим процессам.
4.
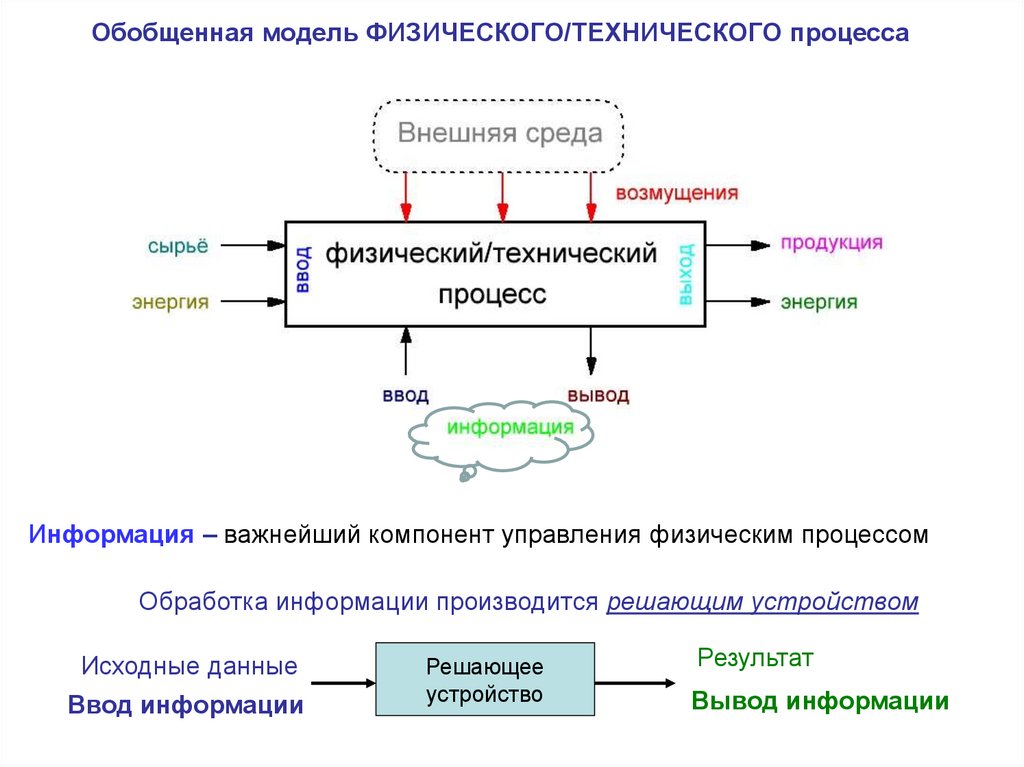
Обобщенная модель ФИЗИЧЕСКОГО/ТЕХНИЧЕСКОГО процессаИнформация – важнейший компонент управления физическим процессом
Обработка информации производится решающим устройством
Исходные данные
Ввод информации
Решающее
устройство
Результат
Вывод информации
5.
Примеры входных и выходных потоков процессаКондиционирование
воздуха
Вход/выход
Химический реактор
Ввод
материальных
компонентов
(сырья)
Потоки исходных реагентов
Холодное рабочее тело
Выход
материальных
компонентов
(продукции)
Один или несколько новых
продуктов
Нагретое рабочее тело
Ввод энергии
Нагревание или охлаждение в
зависимости от хода реакции
Ввод информации
Вывод информации
Управление входными потоками
реагентов и дополнительным
нагревом
Нагревание или
охлаждение
Управление
температурой и
интенсивностью
поступления
нагревающей/
охлаждающей жидкости
Измерение температуры,
Измерение температуры,
давления, интенсивности потоков,
влажности
концентрации
6.
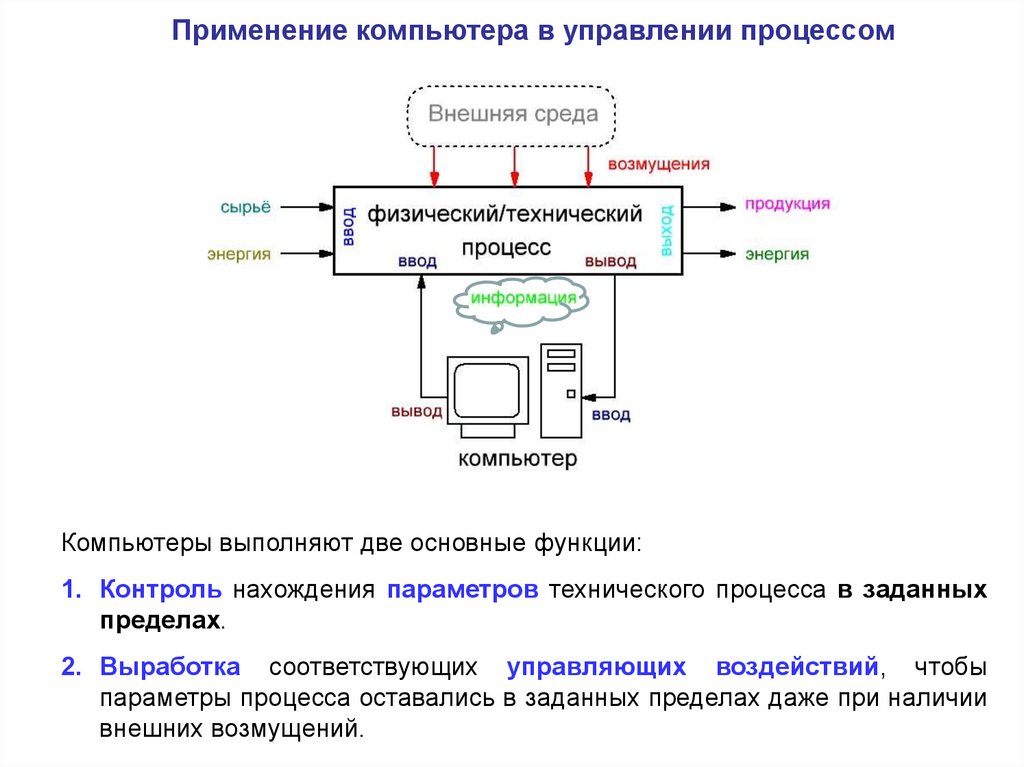
Применение компьютера в управлении процессомКомпьютеры выполняют две основные функции:
1. Контроль нахождения параметров технического процесса в заданных
пределах.
2. Выработка соответствующих управляющих воздействий, чтобы
параметры процесса оставались в заданных пределах даже при наличии
внешних возмущений.
7.
Отличие задачи УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ ПРОЦЕССОМот задачи ОБРАБОТКИ ДАННЫХ
ОБРАБОТКА ДАННЫХ применяется в таких приложениях, как:
техническое проектирование;
моделирование;
редактирование текста, бухгалтерский учет, и т.д.
ВХОД и ВЫХОД представляют собой информацию в чистом виде (данные), которую
можно хранить или передавать с помощью любого носителя информации.
Время
обработки
зависит
только
от
производительности
компьютера,
результат будет всегда один и тот же.
УПРАВЛЕНИЕ ТЕХНИЧЕСКИМ ПРОЦЕССОМ обработка данных следует за
событиями происходящими в самом управляемом процессе и не зависит от структуры
управляющего компьютера и его производительности.
Компьютерная система управления должна постоянно обрабатывать поток
входных данных и быстро реагировать на внешние события, чаще всего не имея
возможности изменить их количество или скорость поступления.
а
8.
Понятие технической системыСИСТЕМА – это любой объект, который рассматривается, с одной стороны, как
единое целое, а с другой – как совокупность связанных между собой
определенным образом составляющих.
Понятие технической системы позволяет:
1. Проще интерпретировать назначение любой сложной структуры, а не
рассматривать её как взаимодействующие друг с другом отдельные части.
2. Проще производить детализацию элементов системы. При описании
системы, её можно по-разному разложить на составные части. Каждая из
частей в свою очередь может быть разбита на более мелкие составляющие.
Важно выбрать правильный уровень детализации.
3. Применять принцип "черного ящика". Обычно нет необходимости знать
внутреннее строение составной части для того, чтобы предвидеть поведение
системы в целом. Достаточно знать причинно-следственную связь между
входом и выходом.
4. Чётко определить целевую установку − получить результат, качественно
или количественно превосходящий механическую (простую) сумму
результатов работы отдельных ее компонентов.
Важнейшей характеристикой системы является её динамика, то есть изменение
состояния системы во времени, знание которой позволяет предсказать поведение
системы и выбрать правильное управляющее воздействие в соответствии с
поставленной целью.
9.
Физический процесспреобразователей).
контролируется
с
помощью
датчиков
(измерительных
ДАТЧИК − это устройство, преобразующее физические параметры процесса
(температуру, давление, координаты и т.д.) в электрическую величину, которую
можно непосредственно измерить (напряжение, ток, сопротивление и т.п.).
Цифровые системы управления работают только с информацией, представленной в
цифровой (дискретной) форме, поэтому полученные в результате измерений
электрические аналоговые (непрерывные) величины необходимо предварительно
преобразовать с помощью аналого-цифрового преобразователя (АЦП).
Технический процесс можно изменить при помощи исполнительных механизмов.
ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ − устройство, которое преобразуют электрические
сигналы в непосредственные физические воздействия, главным образом движение −
перемещение и вращение. Исполнительные
механизмы осуществляют
непосредственное влияние на процесс.
Информация от удаленных объектов поступает к управляющему компьютеру через
КАНАЛЫ СВЯЗИ.
10.
Цифровая система управления физическим/техническимпроцессом
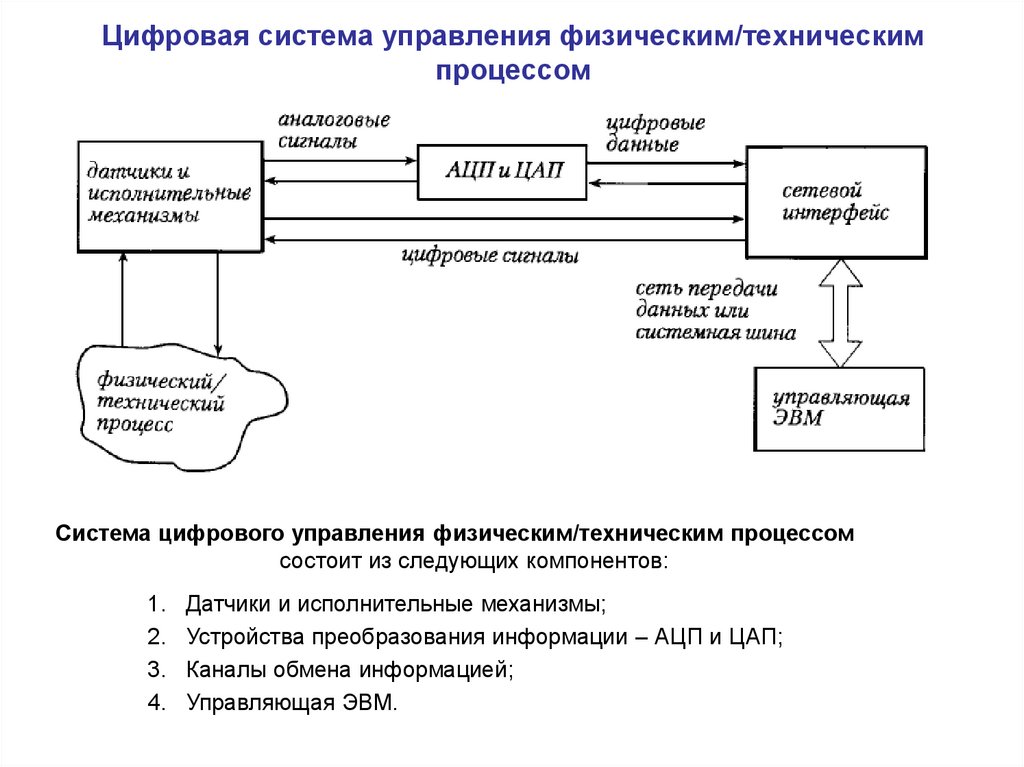
Система цифрового управления физическим/техническим процессом
состоит из следующих компонентов:
1.
2.
3.
4.
Датчики и исполнительные механизмы;
Устройства преобразования информации – АЦП и ЦАП;
Каналы обмена информацией;
Управляющая ЭВМ.
11.
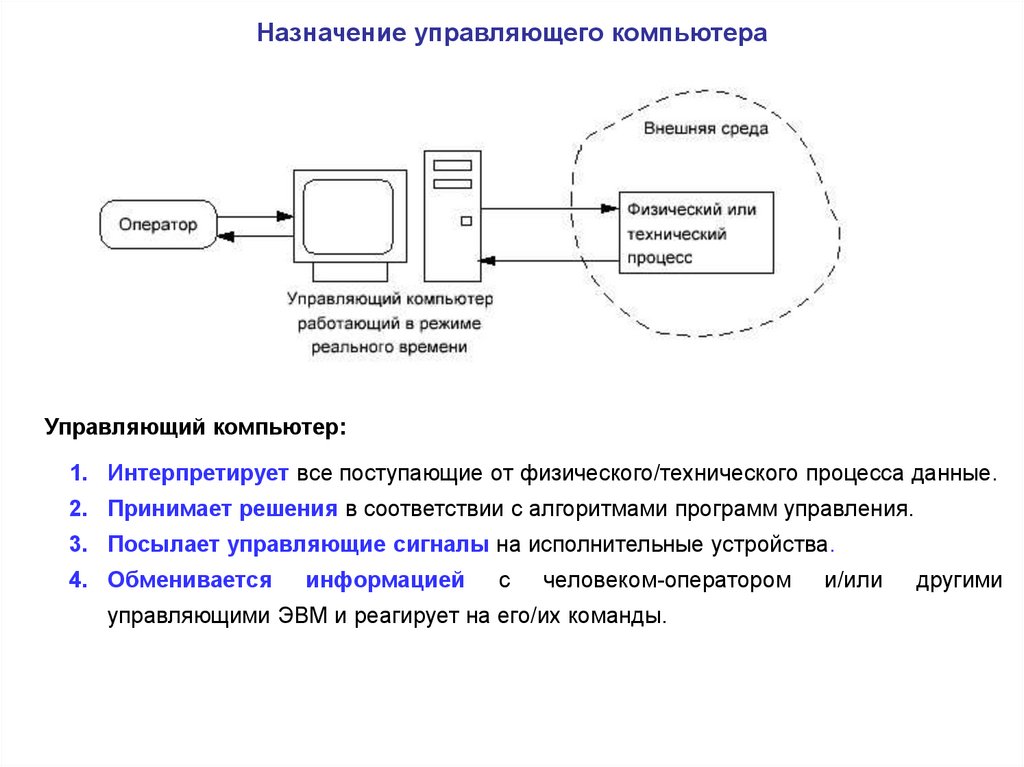
Назначение управляющего компьютераУправляющий компьютер:
1. Интерпретирует все поступающие от физического/технического процесса данные.
2. Принимает решения в соответствии с алгоритмами программ управления.
3. Посылает управляющие сигналы на исполнительные устройства.
4. Обменивается
информацией
с
человеком-оператором
управляющими ЭВМ и реагирует на его/их команды.
и/или
другими
12.
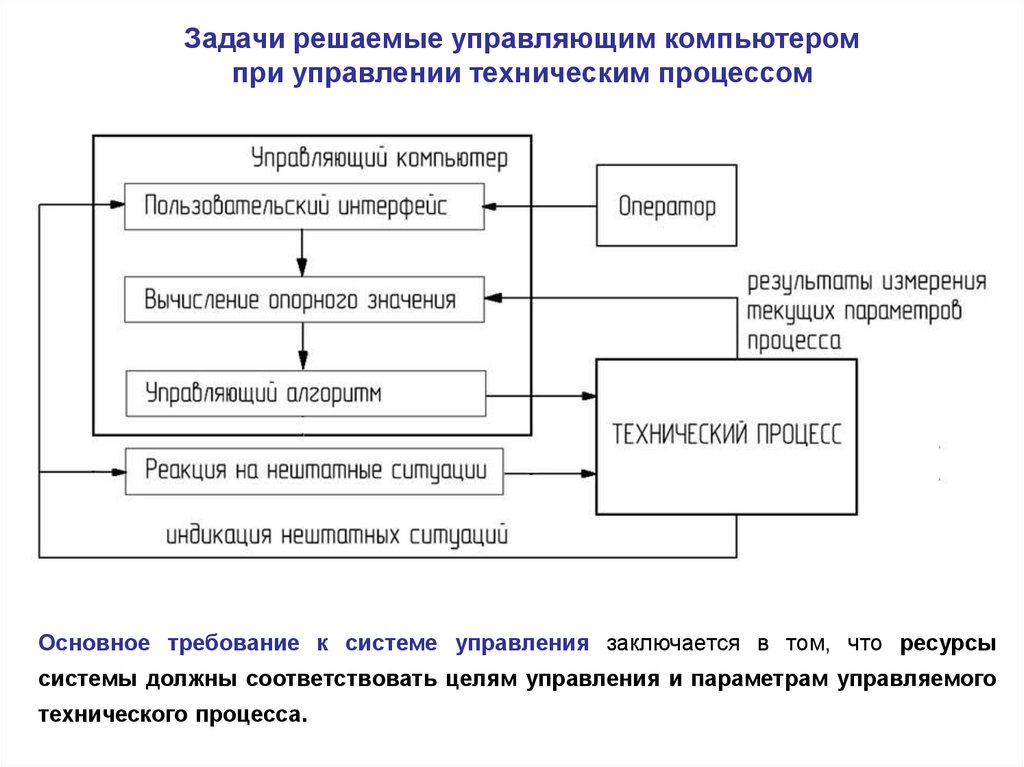
Задачи решаемые управляющим компьютеромпри управлении техническим процессом
Основное требование к системе управления заключается в том, что ресурсы
системы должны соответствовать целям управления и параметрам управляемого
технического процесса.
13.
Особенности цифрового управления процессамиОтличие управляющего компьютера от обычного
1. Управление техническими процессами всегда происходит в реальном времени.
Понятие "реальное время" (это количественный показатель) указывает на то, что
в реакции компьютерной системы на внешние события не должно быть
запаздывания. Это накладывает серьёзные требования на эффективность
использования ресурсов компьютерной системы с учетом временных
ограничений.
2. Используется принципиально другой подход к программированию. Вместо
последовательного используется параллельное исполнение алгоритма
обработки информации. Управляющий компьютер должен работать со
скоростью, соответствующей скорости процесса.
3. Ход исполнения программы нельзя определить заранее. Внешние сигналы
могут прерывать или изменять последовательность исполнения операторов
программы, причем для каждого нового прогона по-разному.
4. Особая специфика тестирования систем реального времени ввиду отсутствия
предсказуемого порядка выполнения элементов (функций, подпрограмм)
программы по сравнению с обычными компьютерными системами.
14.
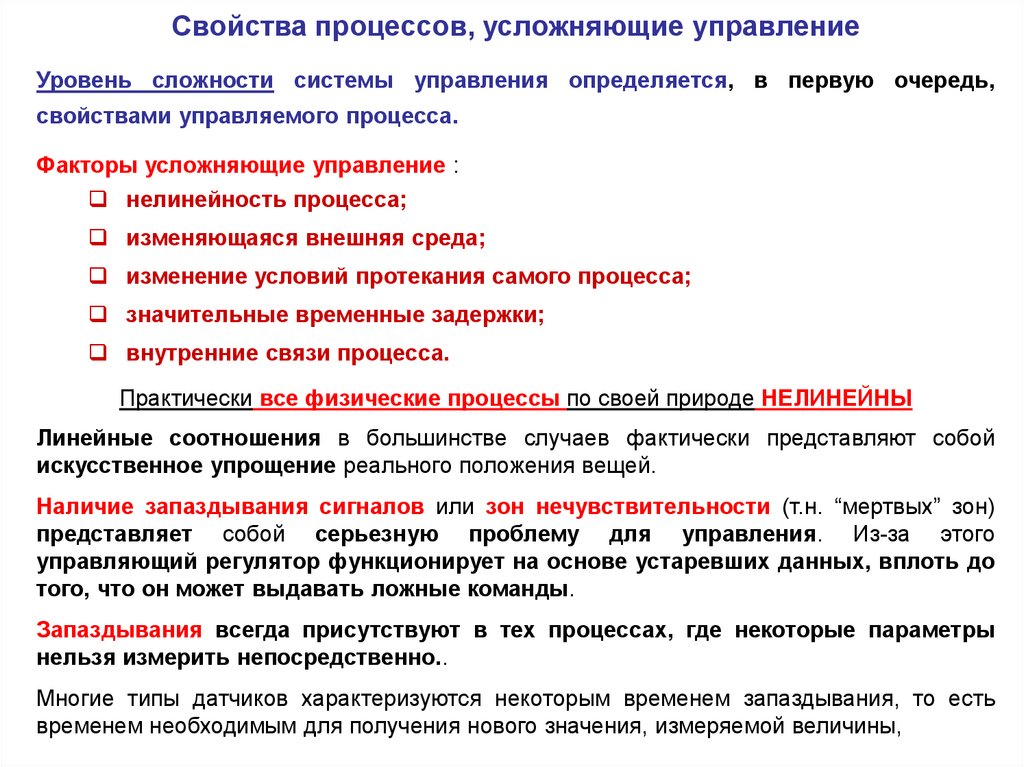
Свойства процессов, усложняющие управлениеУровень сложности системы управления определяется, в первую очередь,
свойствами управляемого процесса.
Факторы усложняющие управление :
нелинейность процесса;
изменяющаяся внешняя среда;
изменение условий протекания самого процесса;
значительные временные задержки;
внутренние связи процесса.
Практически все физические процессы по своей природе НЕЛИНЕЙНЫ
Линейные соотношения в большинстве случаев фактически представляют собой
искусственное упрощение реального положения вещей.
Наличие запаздывания сигналов или зон нечувствительности (т.н. “мертвых” зон)
представляет собой серьезную проблему для управления. Из-за этого
управляющий регулятор функционирует на основе устаревших данных, вплоть до
того, что он может выдавать ложные команды.
Запаздывания всегда присутствуют в тех процессах, где некоторые параметры
нельзя измерить непосредственно..
Многие типы датчиков характеризуются некоторым временем запаздывания, то есть
временем необходимым для получения нового значения, измеряемой величины,
15.
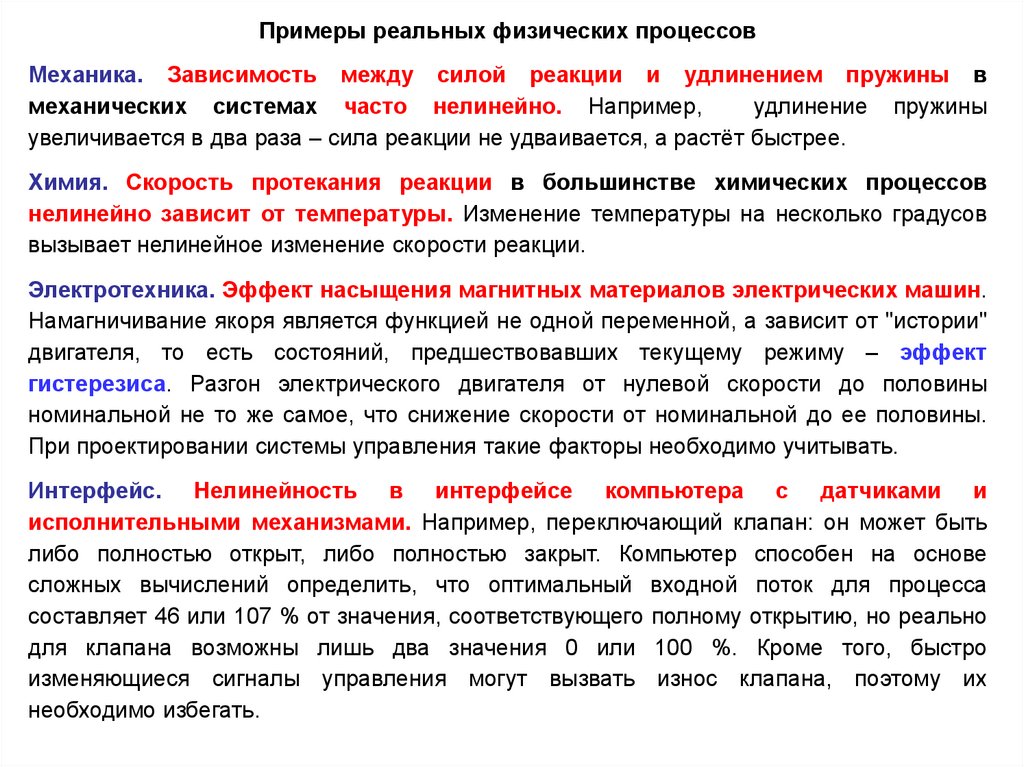
Примеры реальных физических процессовМеханика. Зависимость между силой реакции и удлинением пружины в
механических системах часто нелинейно. Например,
удлинение пружины
увеличивается в два раза – сила реакции не удваивается, а растёт быстрее.
Химия. Скорость протекания реакции в большинстве химических процессов
нелинейно зависит от температуры. Изменение температуры на несколько градусов
вызывает нелинейное изменение скорости реакции.
Электротехника. Эффект насыщения магнитных материалов электрических машин.
Намагничивание якоря является функцией не одной переменной, а зависит от "истории"
двигателя, то есть состояний, предшествовавших текущему режиму – эффект
гистерезиса. Разгон электрического двигателя от нулевой скорости до половины
номинальной не то же самое, что снижение скорости от номинальной до ее половины.
При проектировании системы управления такие факторы необходимо учитывать.
Интерфейс. Нелинейность в интерфейсе компьютера с датчиками и
исполнительными механизмами. Например, переключающий клапан: он может быть
либо полностью открыт, либо полностью закрыт. Компьютер способен на основе
сложных вычислений определить, что оптимальный входной поток для процесса
составляет 46 или 107 % от значения, соответствующего полному открытию, но реально
для клапана возможны лишь два значения 0 или 100 %. Кроме того, быстро
изменяющиеся сигналы управления могут вызвать износ клапана, поэтому их
необходимо избегать.
16.
Внутренние взаимодействия технического процессаЛюбой технический процесс можно представить как систему с внутренними
связями, которая
изменяет своё состояние под воздействием внешних
возмущений и управляющих сигналов
17.
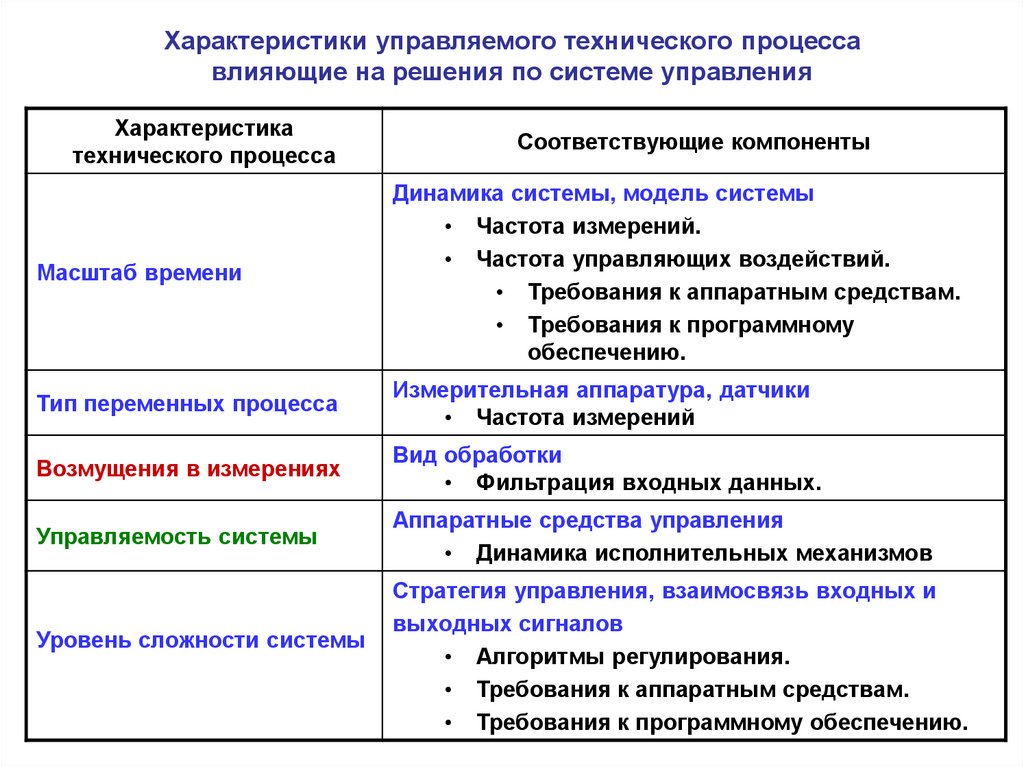
Характеристики управляемого технического процессавлияющие на решения по системе управления
Характеристика
технического процесса
Соответствующие компоненты
Масштаб времени
Динамика системы, модель системы
• Частота измерений.
• Частота управляющих воздействий.
• Требования к аппаратным средствам.
• Требования к программному
обеспечению.
Тип переменных процесса
Измерительная аппаратура, датчики
• Частота измерений
Возмущения в измерениях
Вид обработки
• Фильтрация входных данных.
Управляемость системы
Аппаратные средства управления
• Динамика исполнительных механизмов
Уровень сложности системы
Стратегия управления, взаимосвязь входных и
выходных сигналов
• Алгоритмы регулирования.
• Требования к аппаратным средствам.
• Требования к программному обеспечению.
18.
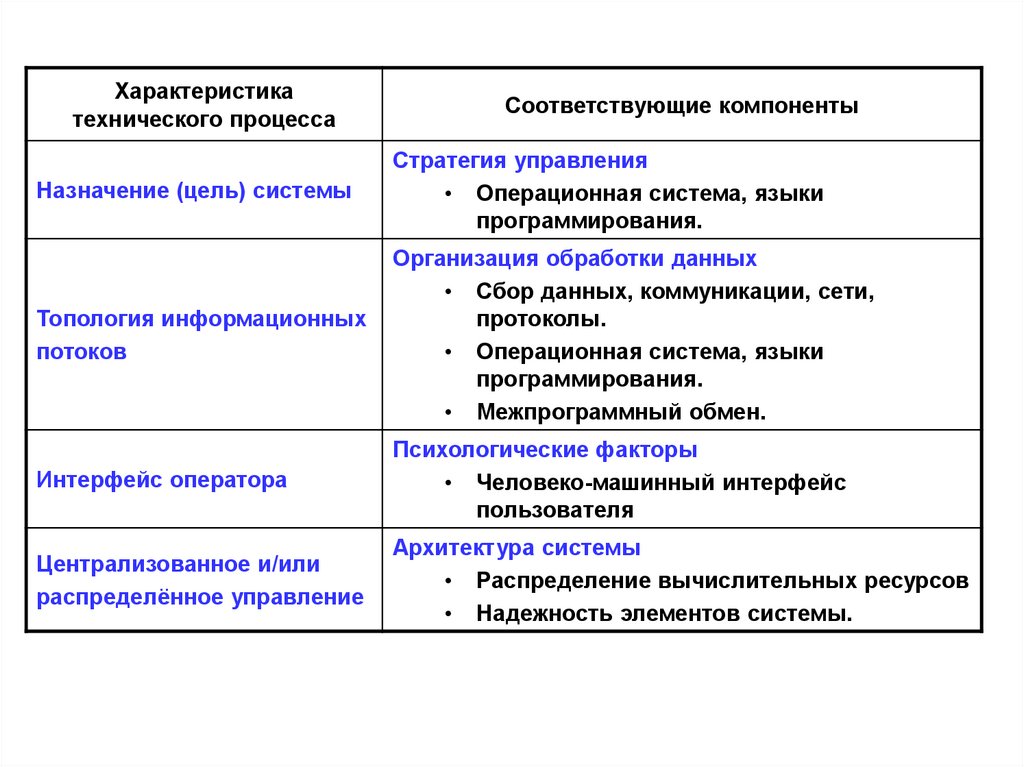
Характеристикатехнического процесса
Соответствующие компоненты
Назначение (цель) системы
Стратегия управления
• Операционная система, языки
программирования.
Топология информационных
потоков
Организация обработки данных
• Сбор данных, коммуникации, сети,
протоколы.
• Операционная система, языки
программирования.
• Межпрограммный обмен.
Интерфейс оператора
Психологические факторы
• Человеко-машинный интерфейс
пользователя
Централизованное и/или
распределённое управление
Архитектура системы
• Распределение вычислительных ресурсов
• Надежность элементов системы.
19.
Отображение развития процесса во времени1. Данные полученные в результате измерений, должны адекватно, с требуемой
точностью отображать динамику процесса.
2. Особую важность имеет периодичность измерения и получения новых
данных, то есть определённая частота опроса (частота выборки) состояния
параметров процесса. Число измерений должно быть достаточным для
обнаружения важных изменений в контролируемых параметрах процесса.
3. Должен быть найден компромисс между затратами на измерение и ценой
последствий, к которым может привести потеря части информации об
изменениях в процессе.
4. На загрузку компьютера влияет не только частота измерений, но и
сложность расчетов в промежутках между измерениями.
20.
Сбор данных измерений и обработка сигналов1. Все сигналы измерений содержат как полезную информацию, так и помехи.
2. Измерения
всегда
приблизительны
из-за
неточности
датчиков,
ошибок
калибровки, или собственного шума.
3. Сигнал, передающийся от датчика к компьютеру через электрический провод, может
быть искажен внешними электромагнитными помехами.
4. Фильтрация сигналов являются обязательным условием.
Фильтр это устройство, которое обрабатывает поступающий сигнал и
извлекает из него информацию в соответствии с заданным критерием.
Фильтр должен быть спроектирован таким образом, чтобы он пропускал
полезную информацию и блокировал ненужную.
Фильтры могут быть выполнены как по аналоговой (непрерывной), так и
по цифровой (дискретной) технологии.
21.
Распределенное прямое цифровое управлениеРаспределенное
прямое
цифровое
управление
−
это
иерархическая
структура на базе соединенных между собой цифровых устройств разного класса,
которая позволяет:
1. Упростить организацию взаимодействия между элементами системы
управления техническим процессом. Для рационального использования
имеющихся
информации,
ресурсов
которой
необходимо
определить
вид
обмениваются
компьютеры,
то
и
количество
есть
определить
информационные потоки (например, не все компьютеры должны получать
подробную информацию об управляемом техническом процессе, а только те
которые могут существенным образом повлиять на течение технического
процесса).
2. Обеспечить надежность передачи управляющей информации – необходимо
принимать такие решения, чтобы данные всегда достигали своего назначения
без искажения и потерь.
3. Обеспечить
стандартизацию
всех
элементов
(компонентов)
системы
используемых для передачи информации. Очевидно, что кабели, разъемы
должны соответствовать друг другу, уровни сигналов должны быть соизмеримы,
а программное обеспечение должно одинаково интерпретировать передаваемые
сообщения и сигналы.
22.
Интерфейс оператораТеоретически управляющая система может функционировать без вмешательства
человека, но всегда необходимо взаимодействие
управляющей системы с
оператором, который должен получать информацию и иметь возможном вводить
команды или управляющие параметры.
Интерфейс оператора (человеко-машинный интерфейс) должен содержать
тщательно отобранную информацию.
Интерфейс оператора сопоставляет способ отображения информации со степенью
ее важности в текущий момент, учитывая при этом человеческие возможности
воспринимать и адекватно на нее реагировать.
Существуют
простые
–
алфавитно-цифровые
и
сложные
–
графические
интерфейсы, которые отображают сложно организованные данные, разнообразную
графику, мультипликацию и видео.
Графические интерфейсы требуют больших вычислительных ресурсов, за
которые программы интерфейса будут конкурировать с модулем обработки
данных, и поэтому оператор может получать информацию с задержкой.
Не вся информация может ждать, например, сигналы тревоги и другие важные
сообщения должны отображаться немедленно.
23.
Заключение1. Для задач управления в режиме реального времени нельзя применять обычные
методы программирования из-за особенностей, присущих этому режиму, так как:
1) система реального времени содержит не одну, а несколько программ,
каждая из которых отвечает за решение своей определенной задачи;
2) порядок выполнения операторов программы реального времени нельзя
определить заранее;
3) порядок
исполнения
может
быть
изменен
внешними
сигналами
как
управления
(например, при обработке прерывания).
2. Цифровая
вычислительная
техника
применяется
для
последовательностью операций, так и для управления систем с обратными
связями. Во многих системах эти методы используются совместно.
Конфигурация аппаратных средств цифровой системы управления зависит от:
• от количества и вида входных и выходных сигналов технического процесса,
• от количества и типа датчиков и исполнительных механизмов,
• от динамики процесса, его внутренних связей и применяемых алгоритмов
регулирования.
24.
3.Управляющая система должна постоянно проверять правильность
функционирования технического процесса; в связи с этим особую важность
имеет координация отдельных специализированных задач.
4.
Организация обмена данными представляет собой центральную задачу систем
управления техническими процессами. Особенно это важно для распределённых
системам управления, которые в настоящее время являются наиболее
распространёнными типами микропроцессорных систем управления.
Под организацией обмена данными понимается:
1. взаимодействие между вычислительной управляющей системой и
техническим процессом,
2. межпрограммный обмен данными,
• как на локальном уровне,
• так и в распределенной среде,
3. интерфейс с пользователем.