


 electronics
electronicsSimilar presentations:










Многоконтурные системы АЭП
1.
Многоконтурные системы АЭПВ процессе регулирования скорости или
положения
вала
исполнительного
двигателя требуется контролировать и
ограничивать
ряд
координат
электропривода на допустимом уровне
(ток, напряжение, ЭДС, поток, скорость
и т.д.), поэтому современные системы
АЭП - многоконтурные
2.
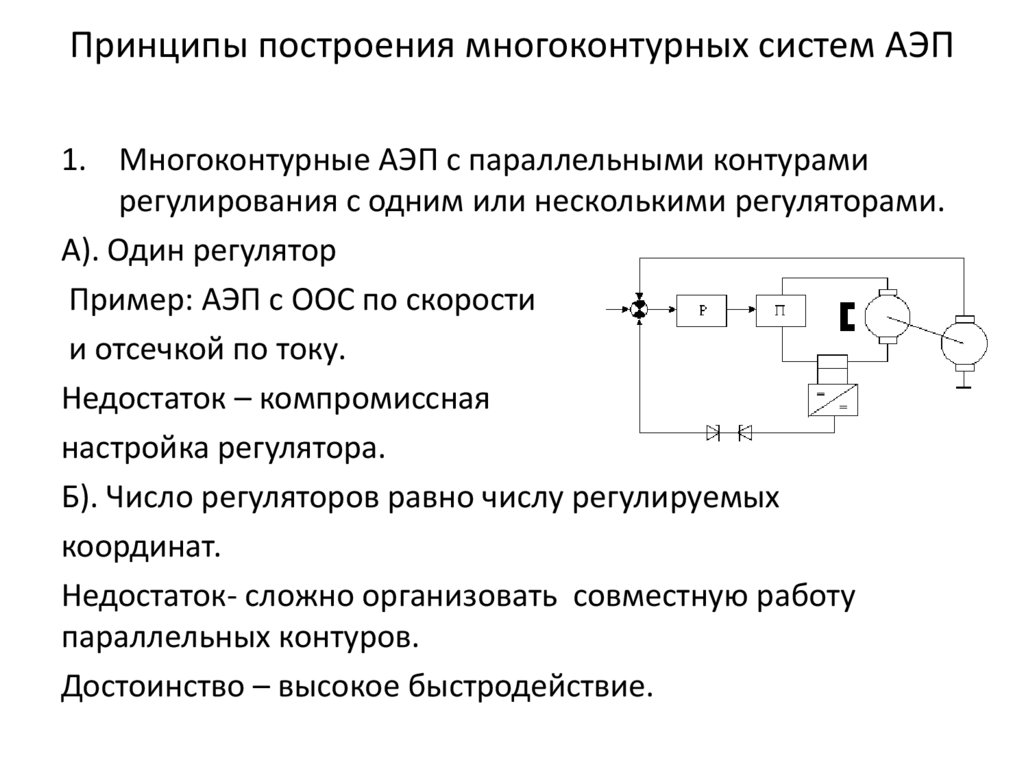
Принципы построения многоконтурных систем АЭП1. Многоконтурные АЭП с параллельными контурами
регулирования с одним или несколькими регуляторами.
А). Один регулятор
Пример: АЭП с ООС по скорости
и отсечкой по току.
Недостаток – компромиссная
настройка регулятора.
Б). Число регуляторов равно числу регулируемых
координат.
Недостаток- сложно организовать совместную работу
параллельных контуров.
Достоинство – высокое быстродействие.
3.
Принципы построения многоконтурных систем АЭП2. Многоконтурные системы с концентрическими контурами
регулирования (последовательно включенными регуляторами).
У каждого параметра - свой регулятор, поэтому можно
обеспечить оптимальность настройки каждого контура. Цель
регулирования определяется внешним контуром (в данном
случае контуром скорости). Выходной сигнал РС является
задающим для внутреннего контура. Контур тока является
подчиненным контуру скорости, следовательно, это система с
подчиненным регулированием параметров (ПРП).
4.
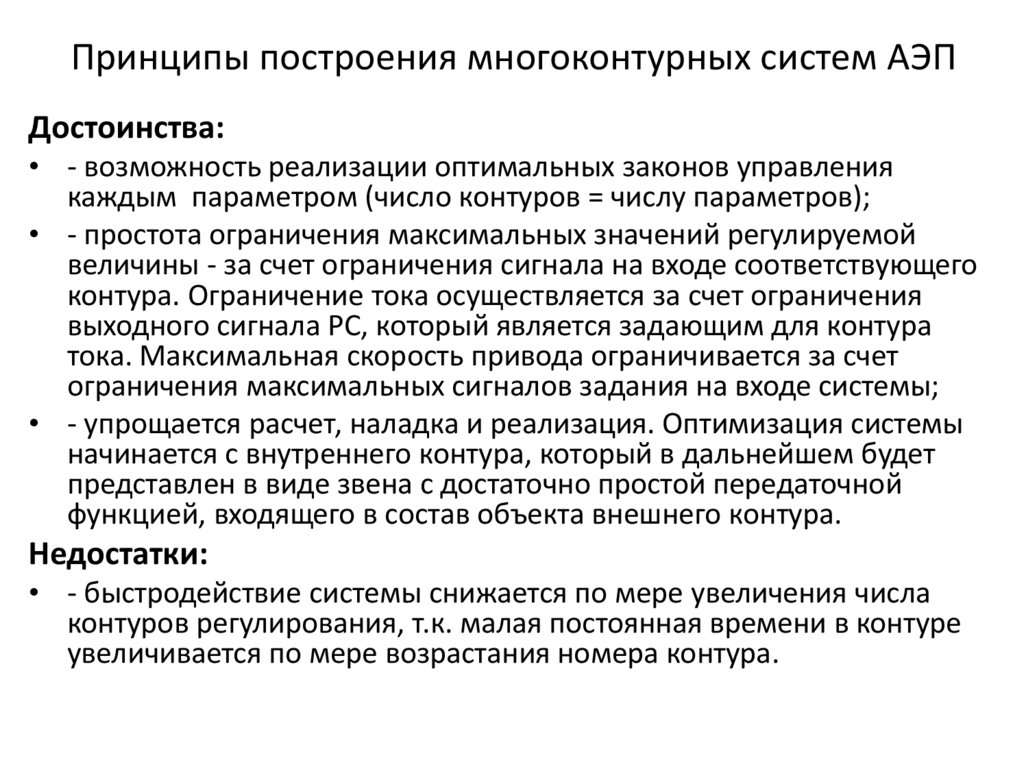
Принципы построения многоконтурных систем АЭПДостоинства:
• - возможность реализации оптимальных законов управления
каждым параметром (число контуров = числу параметров);
• - простота ограничения максимальных значений регулируемой
величины - за счет ограничения сигнала на входе соответствующего
контура. Ограничение тока осуществляется за счет ограничения
выходного сигнала РС, который является задающим для контура
тока. Максимальная скорость привода ограничивается за счет
ограничения максимальных сигналов задания на входе системы;
• - упрощается расчет, наладка и реализация. Оптимизация системы
начинается с внутреннего контура, который в дальнейшем будет
представлен в виде звена с достаточно простой передаточной
функцией, входящего в состав объекта внешнего контура.
Недостатки:
• - быстродействие системы снижается по мере увеличения числа
контуров регулирования, т.к. малая постоянная времени в контуре
увеличивается по мере возрастания номера контура.
5.
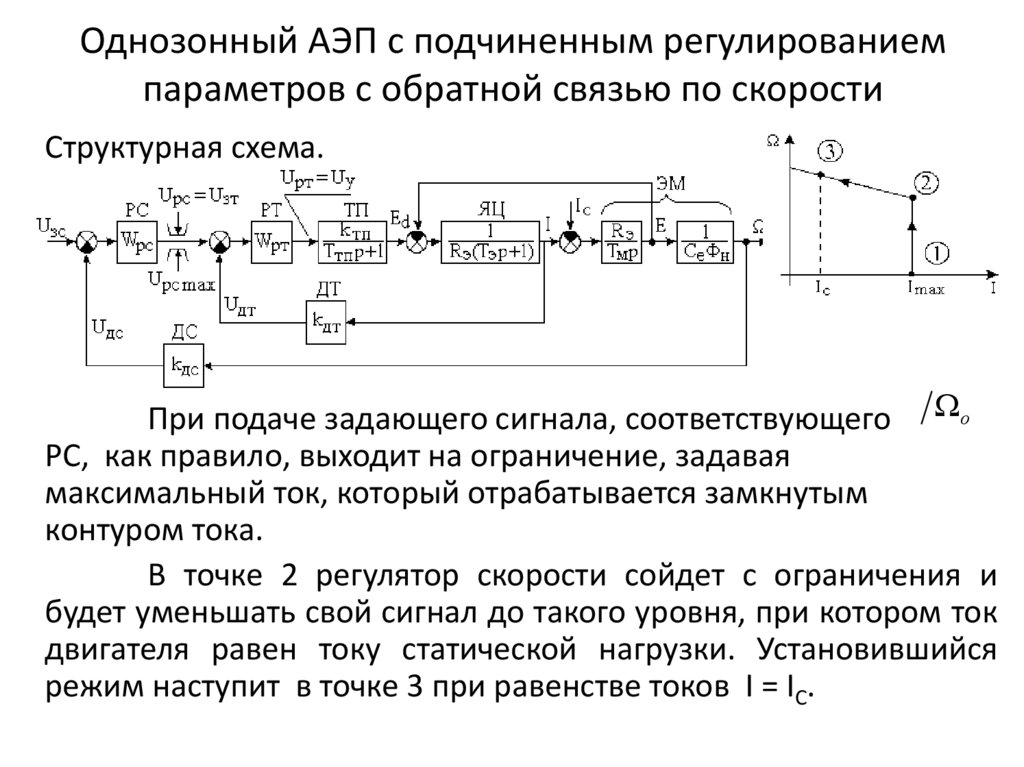
Однозонный АЭП с подчиненным регулированиемпараметров с обратной связью по скорости
Структурная схема.
При подаче задающего сигнала, соответствующего о
РС, как правило, выходит на ограничение, задавая
максимальный ток, который отрабатывается замкнутым
контуром тока.
В точке 2 регулятор скорости сойдет с ограничения и
будет уменьшать свой сигнал до такого уровня, при котором ток
двигателя равен току статической нагрузки. Установившийся
режим наступит в точке 3 при равенстве токов I = IC.
6.
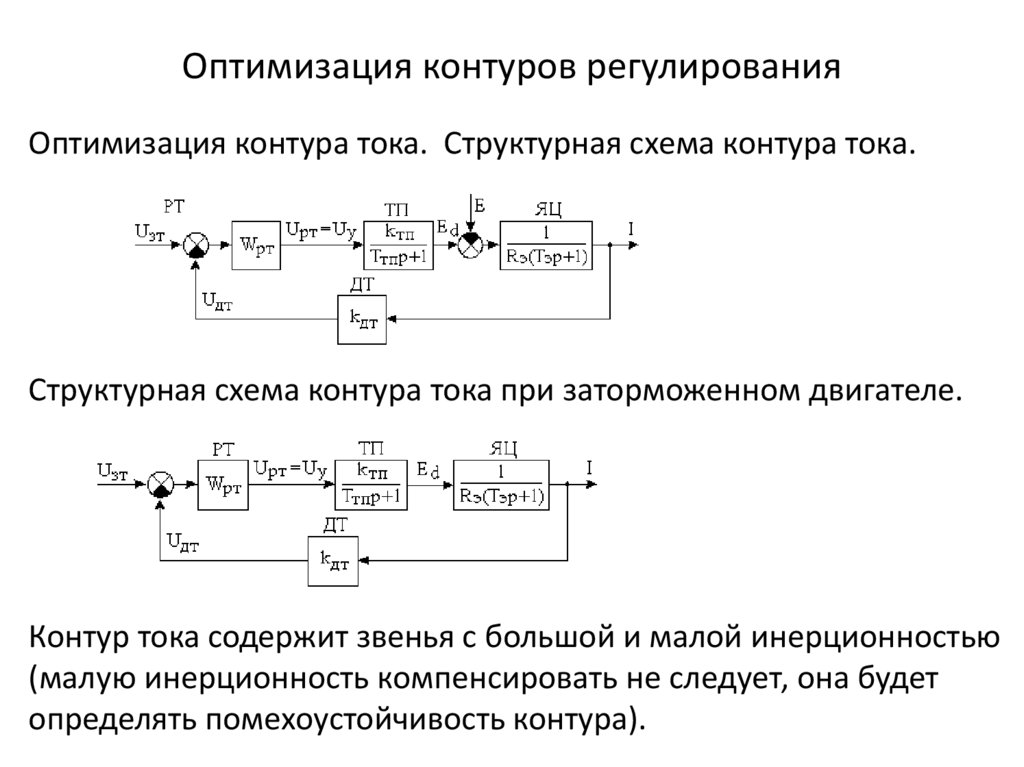
Оптимизация контуров регулированияОптимизация контура тока. Структурная схема контура тока.
Структурная схема контура тока при заторможенном двигателе.
Контур тока содержит звенья с большой и малой инерционностью
(малую инерционность компенсировать не следует, она будет
определять помехоустойчивость контура).
7.
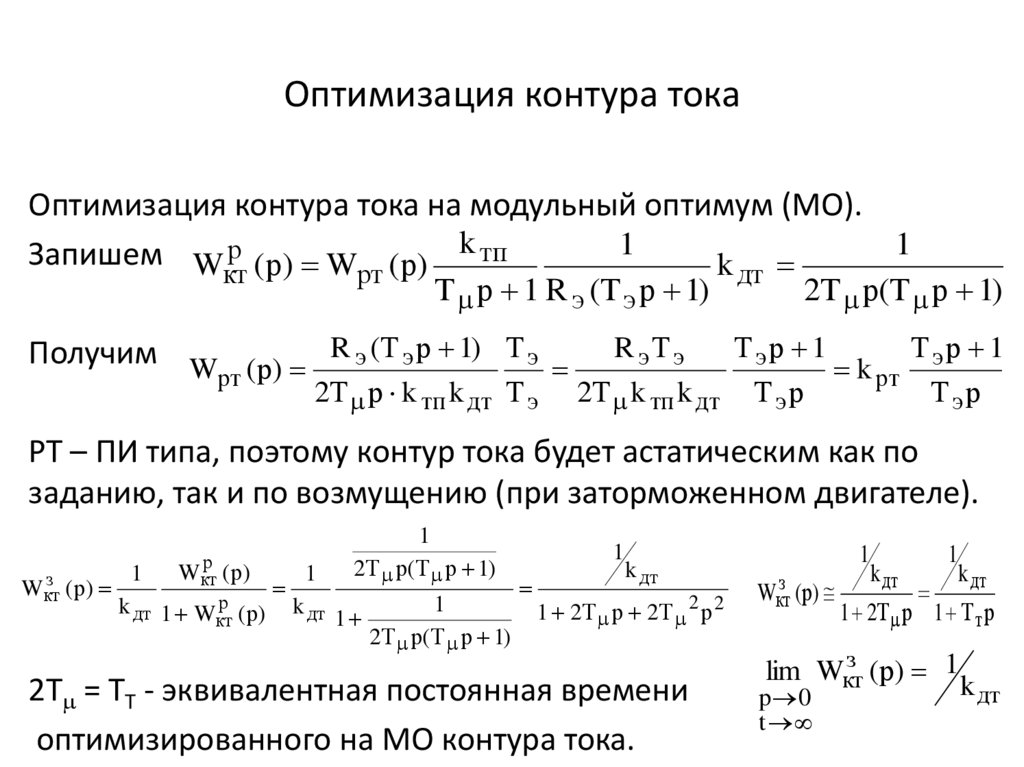
Оптимизация контура токаОптимизация контура тока на модульный оптимум (МО).
1
1
Запишем W р (р) W (р) k тп
k
кт
рт
Т р 1 R э (Т э р 1)
Получим W (р) R э (Т э р 1) Т э
рт
2Т р k тп k дт Т э
дт
2Т р(Т р 1)
R эТ э
Тэр 1
Тэр 1
k рт
2Т k тп k дт Т э р
Тэр
РТ – ПИ типа, поэтому контур тока будет астатическим как по
заданию, так и по возмущению (при заторможенном двигателе).
з
Wкт
( р)
1
р
Wкт (р)
k дт 1 W р (р)
кт
1
k дт
1
2Т р(Т р 1)
1
1
2Т р(Т р 1)
1
k дт
1 2Т р 2Т 2 р 2
2Т = ТТ - эквивалентная постоянная времени
оптимизированного на МО контура тока.
1
Wктз (р)
k дт
1
k дт
1 2Т р 1 Т т р
з
lim Wкт
( р) 1
p 0
t
k дт
8.
Оптимизация контура токаОценка влияния внутренней обратной связи по ЭДС на
процессы в контуре тока.
Структурная схема контура тока с учетом влияния
внутренней отрицательной обратной связи по ЭДС.
Максимальное влияние ЭДС будет на ХХ, поэтому примем
(Iс =0).
9.
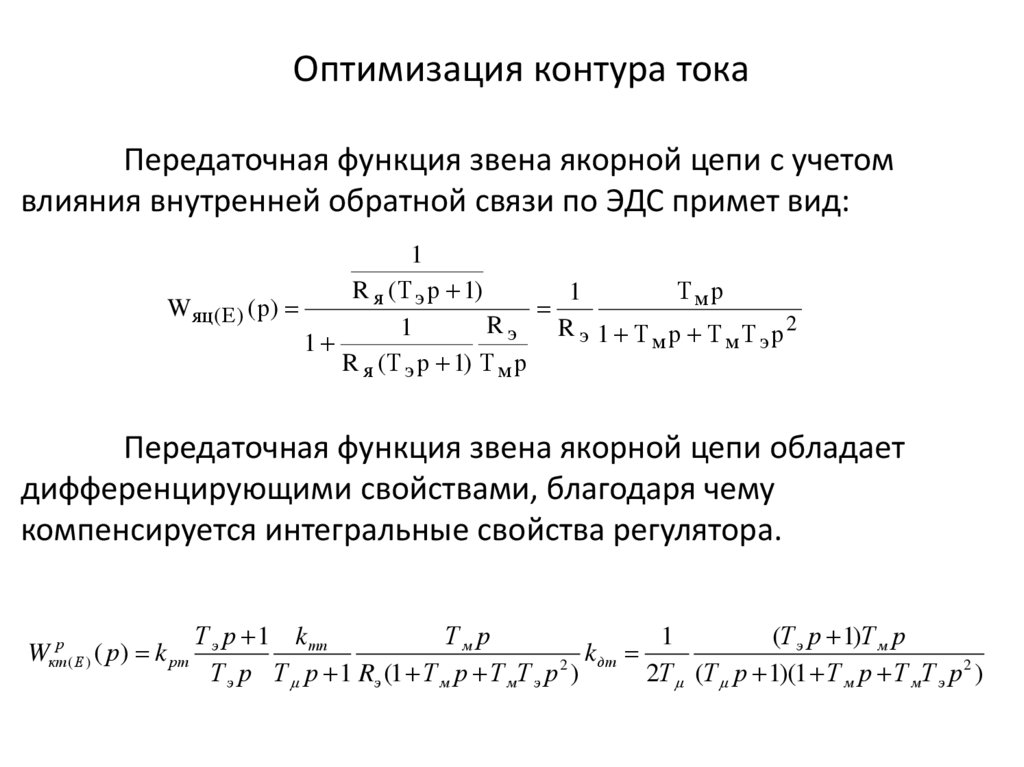
Оптимизация контура токаПередаточная функция звена якорной цепи с учетом
влияния внутренней обратной связи по ЭДС примет вид:
1
R я (Т э р 1)
Тмр
1
Wяц ( Е ) (р)
Rэ
1
R э 1 Тмр ТмТэр2
1
R я (Т э р 1) Т м р
Передаточная функция звена якорной цепи обладает
дифференцирующими свойствами, благодаря чему
компенсируется интегральные свойства регулятора.
Wктр ( Е ) ( р) k рт
Т э р 1 k тп
Тм р
(Т э р 1)Т м р
1
k
дт
Т э р Т р 1 Rэ (1 Т м р Т мТ э р 2 )
2Т (Т р 1)(1 Т м р Т мТ э р 2 )
10.
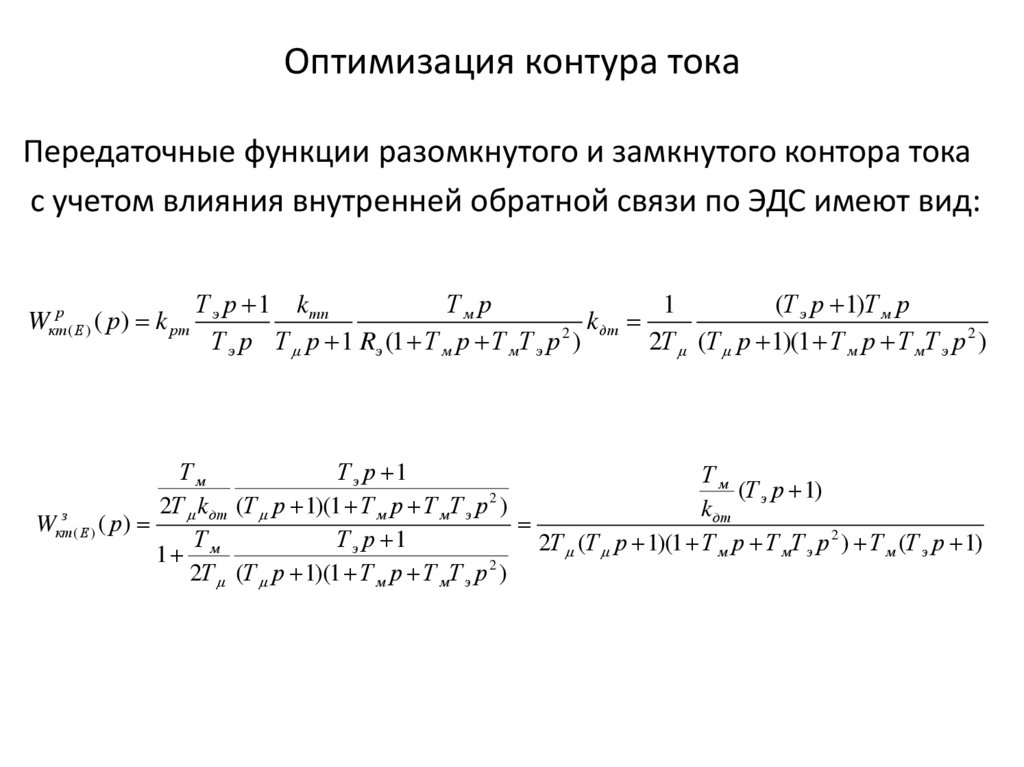
Оптимизация контура токаПередаточные функции разомкнутого и замкнутого контора тока
с учетом влияния внутренней обратной связи по ЭДС имеют вид:
Wктр ( Е ) ( р) k рт
Т э р 1 k тп
Тм р
(Т э р 1)Т м р
1
k
дт
Т э р Т р 1 Rэ (1 Т м р Т мТ э р 2 )
2Т (Т р 1)(1 Т м р Т мТ э р 2 )
Тм
Тэ р 1
Тм
(Т э р 1)
2
2
Т
k
(
Т
р
1
)(
1
Т
р
Т
Т
р
)
k
дт
м
м э
дт
Wктз ( Е ) ( р )
2
Тм
Тэ р 1
2
Т
(
Т
р
1
)(
1
Т
р
Т
Т
р
) Т м (Т э р 1)
м
м
э
1
2Т (Т р 1)(1 Т м р Т мТ э р 2 )
11.
Оптимизация контура токаВ установившемся режиме разгона-торможения двигателя на ХХ:
Т м k дт
1 k дт
з
lim Wкт ( Е ) (р)
2Т
2Т Т м
p 0
1
Тм
1 k дт
U зт
Iу
2Т
1
Тм
Iy
1
Iз
2Т
Тм
где IЗ – заданная величина тока в контуре тока в случае
заторможенного ЭП.
Контур тока, который при заторможенном двигателе с ПИрегулятором был астатическим, становится статическим в
переходном режиме ( Е 0). Ошибка регулирования тем больше,
чем меньше постоянная времени ТМ.
12.
Оптимизация контура токаДругое следствие влияния ОС по ЭДС - это увеличенное
перерегулирование. По отношению к новому уровню
установившегося тока перерегулирование увеличивается, но
по абсолютной величине будет меньше.
Если ЭП имеет большую ТМ, то за время выхода тока
на заданный уровень ЭДС электродвигателя практически не
меняется и ее влияние на ток минимально.
В АЭП с высокомоментными ЭД, где ТМ мала, влияние
внутренней ОС по ЭДС существенно, поэтому в таких АЭП
следует применить другую передаточную функцию
регулятора тока.
13.
Оптимизация контура токаОсциллограммы тока при отработке скачка задающего
сигнала при заторможенном двигателе и при учете влияния
внутренней обратной связи по ЭДС (при пуске - торможении).
Максимальное влияние внутренней ООС по ЭДС имеет место
при пуске на ХХ и при торможении под нагрузкой.
14.
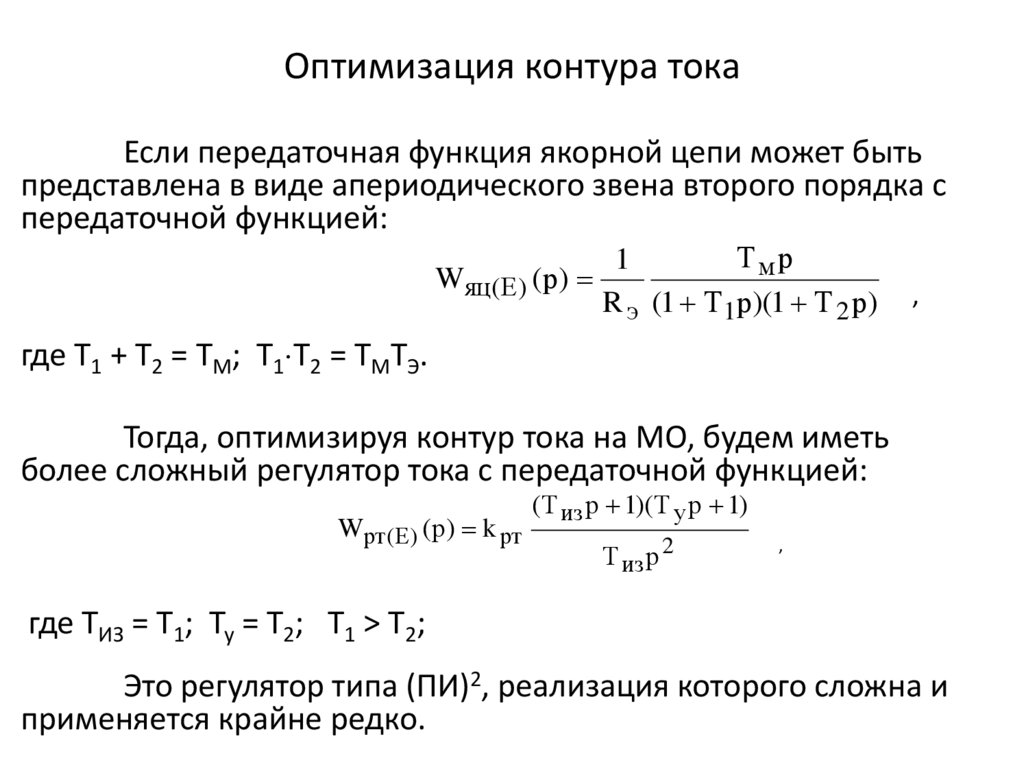
Оптимизация контура токаЕсли передаточная функция якорной цепи может быть
представлена в виде апериодического звена второго порядка с
передаточной функцией:
Wяц ( Е ) (р)
Тмр
1
R э (1 Т1р)(1 Т 2 р)
,
где Т1 + Т2 = ТМ; Т1 Т2 = ТМТЭ.
Тогда, оптимизируя контур тока на МО, будем иметь
более сложный регулятор тока с передаточной функцией:
Wрт ( Е ) (р) k рт
(Т из р 1)(Т у р 1)
Т из р 2
,
где ТИЗ = Т1; Ту = Т2; Т1 > Т2;
Это регулятор типа (ПИ)2, реализация которого сложна и
применяется крайне редко.
15.
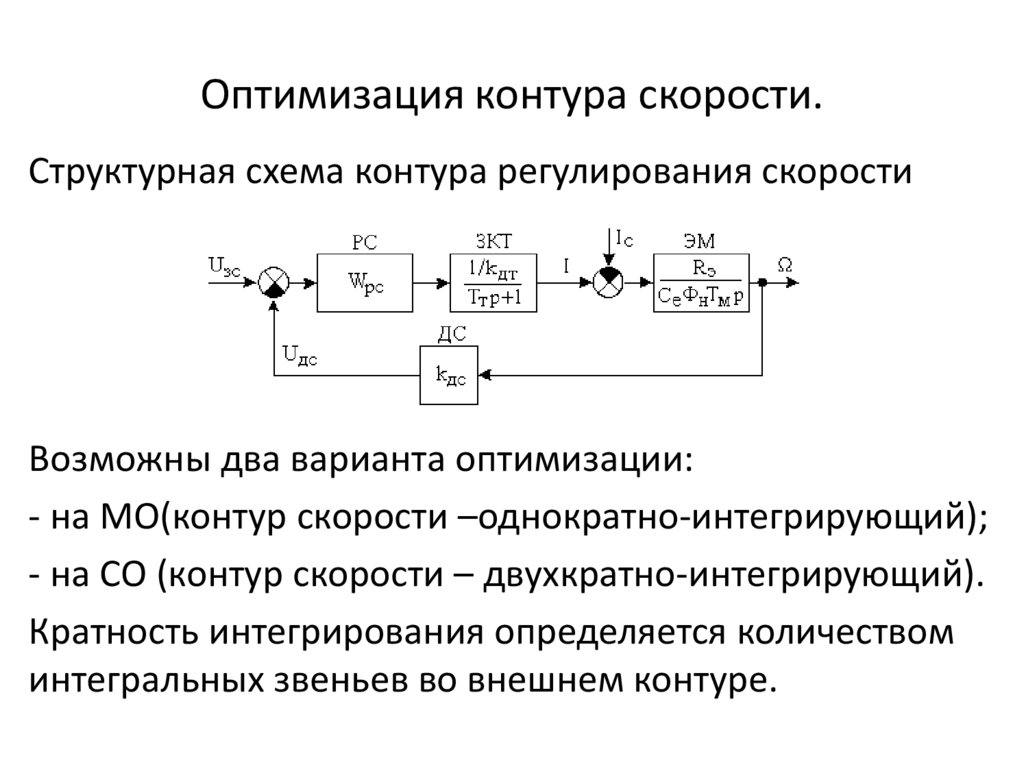
Оптимизация контура скорости.Структурная схема контура регулирования скорости
Возможны два варианта оптимизации:
- на МО(контур скорости –однократно-интегрирующий);
- на СО (контур скорости – двухкратно-интегрирующий).
Кратность интегрирования определяется количеством
интегральных звеньев во внешнем контуре.
16.
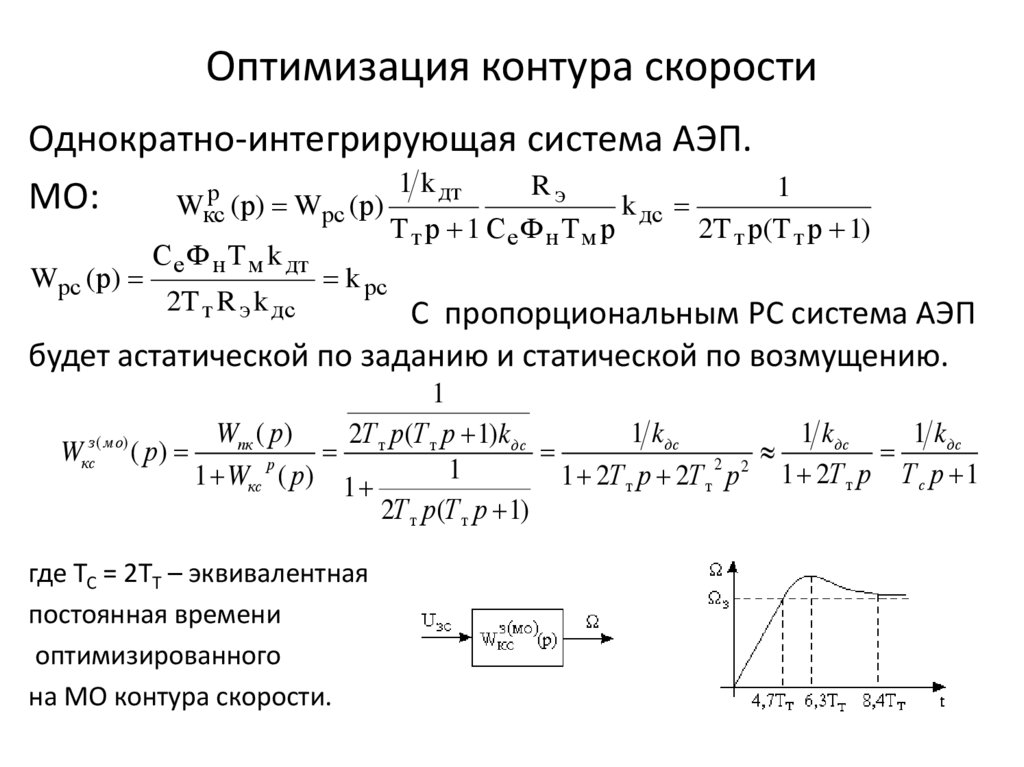
Оптимизация контура скоростиОднократно-интегрирующая система АЭП.
1 k дт
Rэ
р
МО:
Wкс (р) Wрс (р)
k дс
Wрс (р)
С е Ф н Т м k дт
2Т т R э k дс
Т т р 1 СеФн Т м р
1
2Т т р(Т т р 1)
k рс
С пропорциональным РС система АЭП
будет астатической по заданию и статической по возмущению.
1
Wпк ( р )
1 kдс
1 kдс
1 kдс
2Т т р(Т т р 1)kдс
Wксз ( м о) ( р )
р
2
1
1 Wкс ( р ) 1
1 2Т т р 2Т т р 2 1 2Т т р Т с р 1
2Т т р (Т т р 1)
где ТС = 2ТТ – эквивалентная
постоянная времени
оптимизированного
на МО контура скорости.
17.
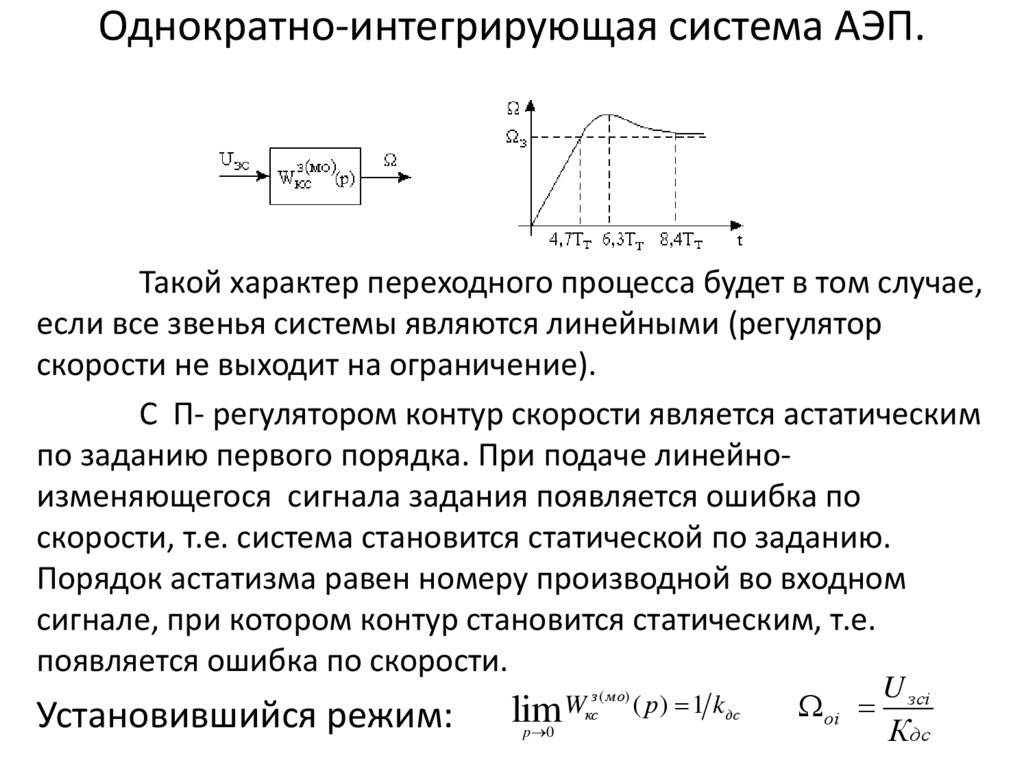
Однократно-интегрирующая система АЭП.Такой характер переходного процесса будет в том случае,
если все звенья системы являются линейными (регулятор
скорости не выходит на ограничение).
С П- регулятором контур скорости является астатическим
по заданию первого порядка. При подаче линейноизменяющегося сигнала задания появляется ошибка по
скорости, т.е. система становится статической по заданию.
Порядок астатизма равен номеру производной во входном
сигнале, при котором контур становится статическим, т.е.
появляется ошибка по скорости.
Установившийся режим:
з ( м о)
lim Wкc ( р) 1 kдc
p 0
оi
U зсi
Кдс
18.
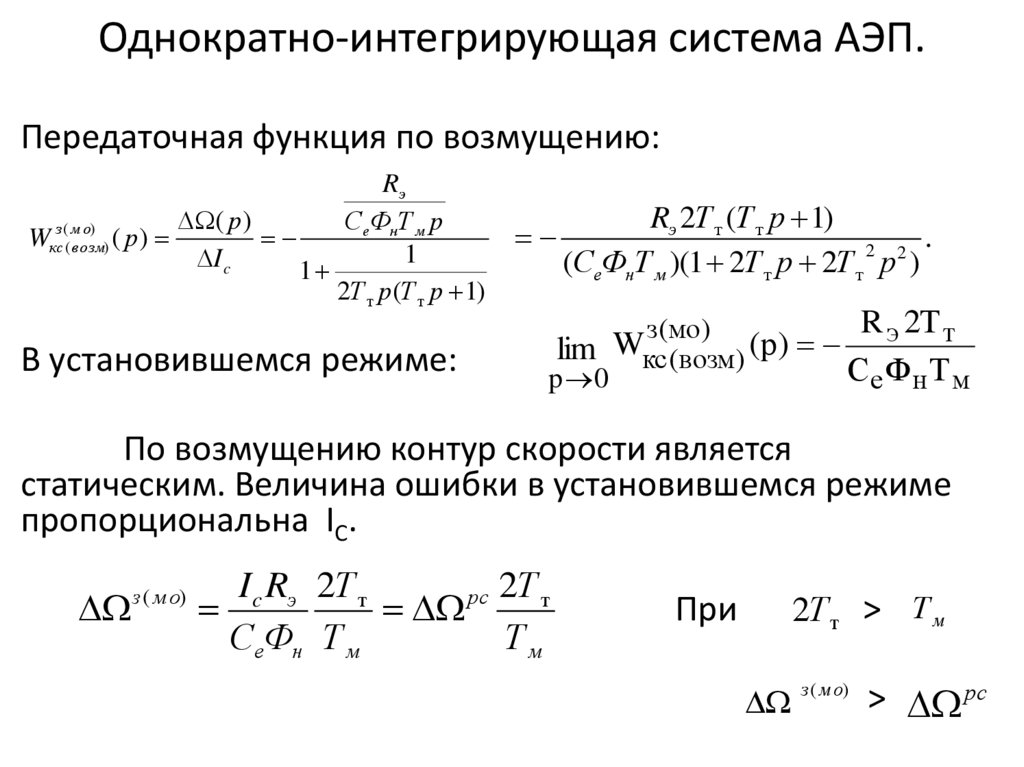
Однократно-интегрирующая система АЭП.Передаточная функция по возмущению:
Rэ
( р )
СеФнТ м р
о)
Wксз ((мв озм
(
р
)
)
1
I c
1
2Т т р (Т т р 1)
В установившемся режиме:
Rэ 2Т т (Т т р 1)
.
2 2
(СеФнТ м )(1 2Т т р 2Т т р )
R э 2Т т
з(мо)
lim Wкc (возм) (р)
Се Ф н Т м
p 0
По возмущению контур скорости является
статическим. Величина ошибки в установившемся режиме
пропорциональна IС.
з ( м о)
I c Rэ 2Т т
рс 2Т т
СеФн Т м
Тм
2Т т > Т м
При
з ( мо)
> рс
19.
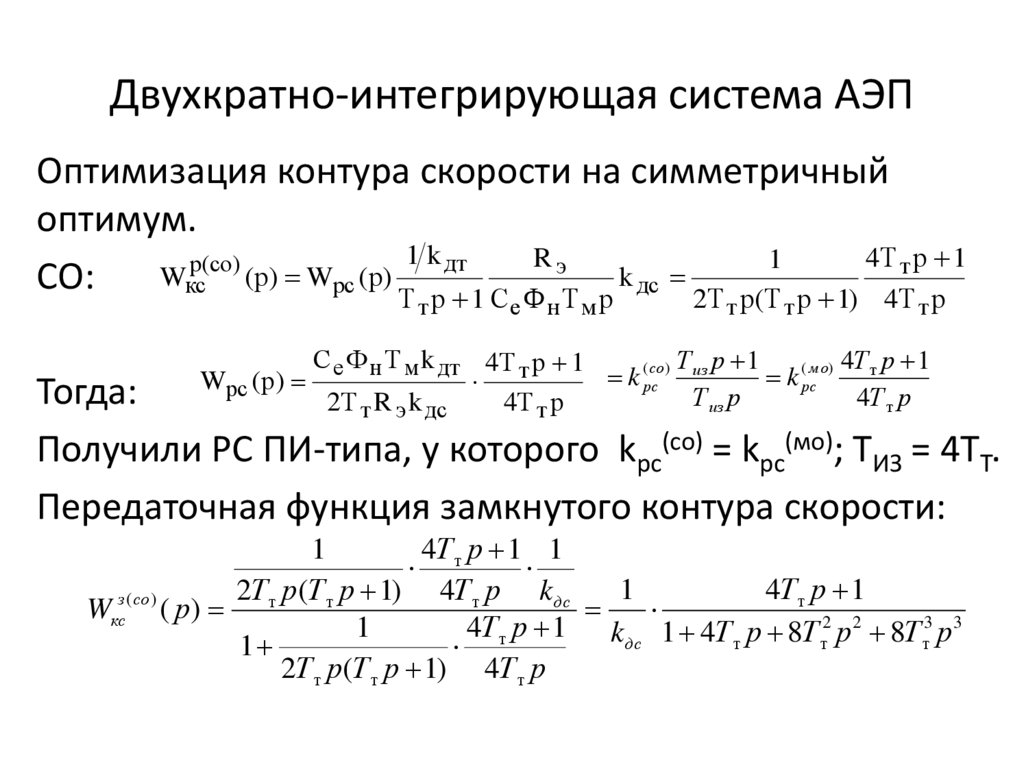
Двухкратно-интегрирующая система АЭПОптимизация контура скорости на симметричный
оптимум.
1 k дт
Rэ
4Т т р 1
1
р(со)
Wкс (р) Wрс (р)
k дс
СО:
Т р 1 С Ф Т р
2Т р(Т р 1) 4Т р
т
е
н м
т
т
т
С е Ф н Т м k дт 4Т т р 1
( со ) Т из р 1
( м о) 4Т т р 1
k
k
Wрс (р)
рс
рс
Тогда:
Т
р
4Т т р
2Т т R э k дс
4Т т р
из
Получили РС ПИ-типа, у которого kрс(со) = kрс(мо); ТИЗ =
4ТТ.
Передаточная функция замкнутого контура скорости:
1
4Т р 1 1
т
1
4Т т р 1
2Т р (Т т р 1) 4Т т р kдс
Wксз ( со ) ( р ) т
1
4Т т р 1 kдс 1 4Т т р 8Т т2 р 2 8Т т3 р 3
1
2Т т р (Т т р 1) 4Т т р
20.
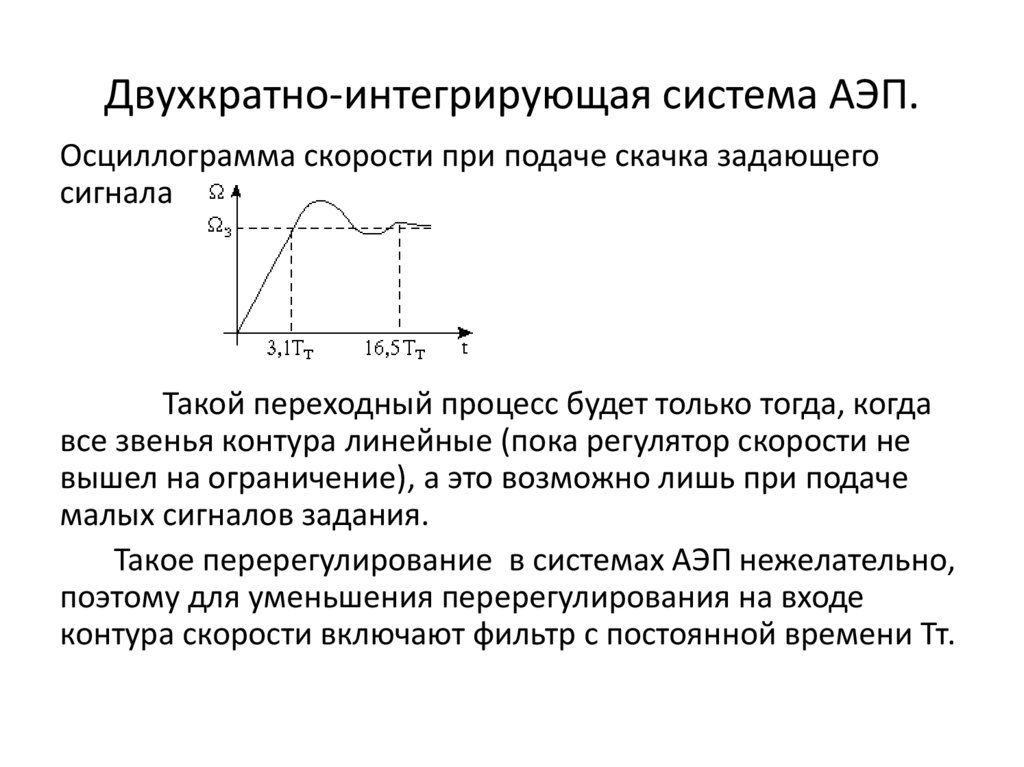
Двухкратно-интегрирующая система АЭП.Осциллограмма скорости при подаче скачка задающего
сигнала
Такой переходный процесс будет только тогда, когда
все звенья контура линейные (пока регулятор скорости не
вышел на ограничение), а это возможно лишь при подаче
малых сигналов задания.
Такое перерегулирование в системах АЭП нежелательно,
поэтому для уменьшения перерегулирования на входе
контура скорости включают фильтр с постоянной времени Тт.
21.
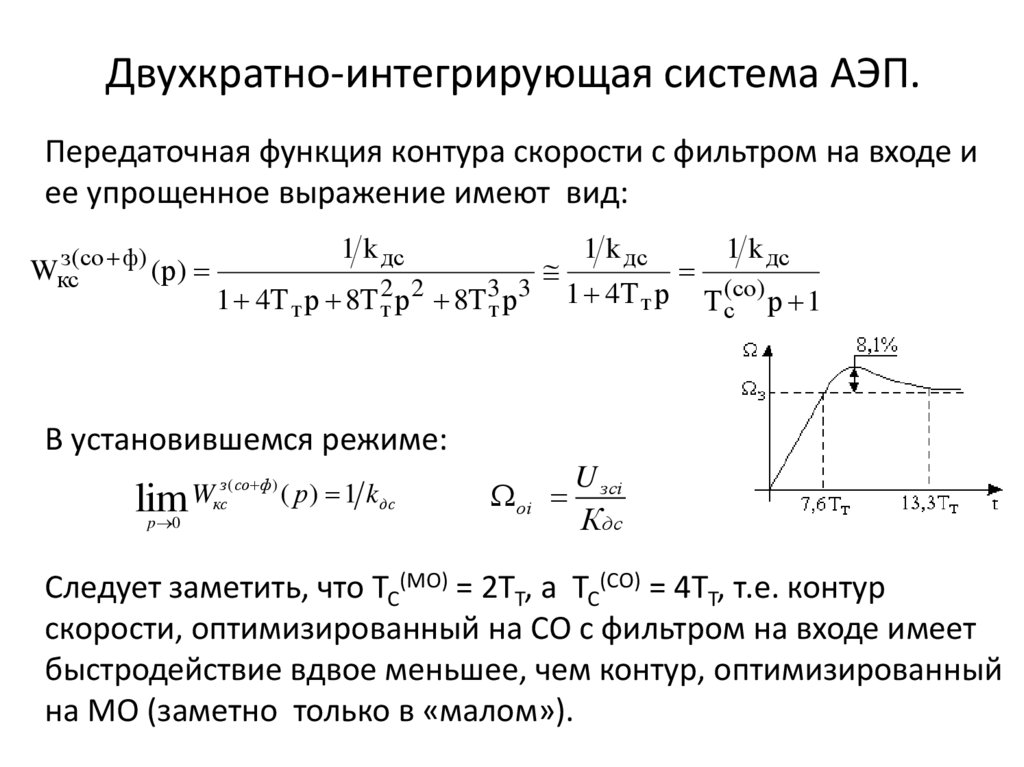
Двухкратно-интегрирующая система АЭП.Передаточная функция контура скорости с фильтром на входе и
ее упрощенное выражение имеют вид:
з(со ф)
Wкс
( р)
1 k дс
1 4Т т р 8Т 2т р 2 8Т 3т р 3
1 k дс
1 4Т т р
1 k дс
Т (ссо) р 1
В установившемся режиме:
з ( со ф )
lim Wкc ( р) 1 kдc
p 0
оi
U зсi
Кдс
Следует заметить, что ТС(МО) = 2ТТ, а ТС(СО) = 4ТТ, т.е. контур
скорости, оптимизированный на СО с фильтром на входе имеет
быстродействие вдвое меньшее, чем контур, оптимизированный
на МО (заметно только в «малом»).
22.
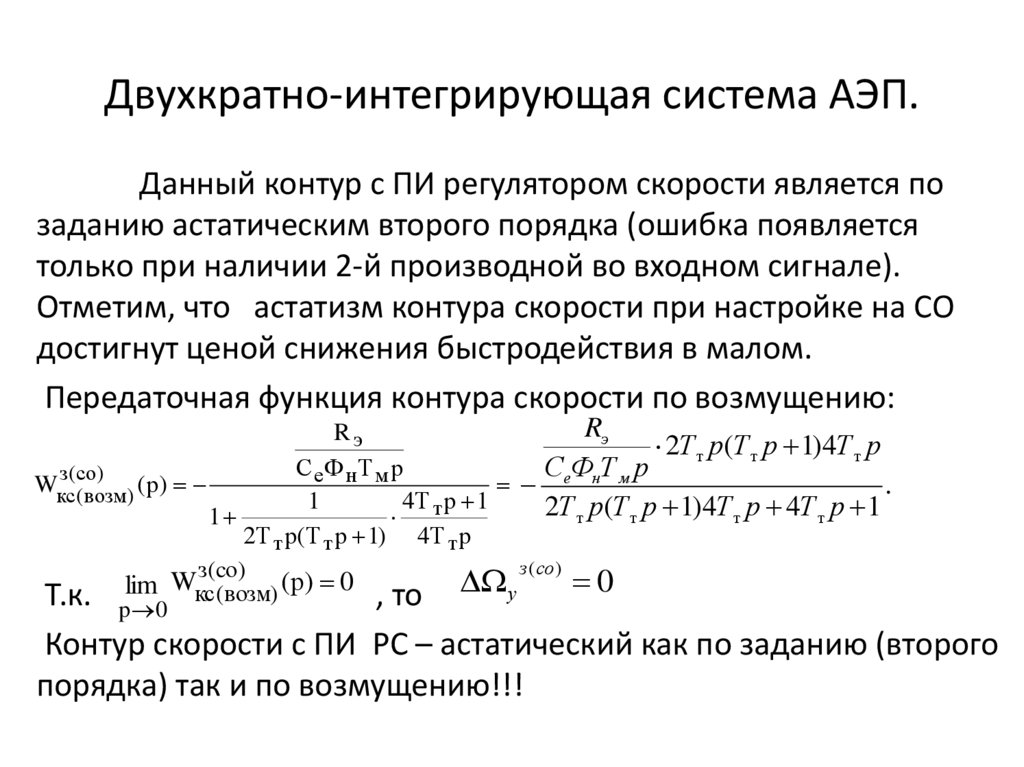
Двухкратно-интегрирующая система АЭП.Данный контур с ПИ регулятором скорости является по
заданию астатическим второго порядка (ошибка появляется
только при наличии 2-й производной во входном сигнале).
Отметим, что астатизм контура скорости при настройке на СО
достигнут ценой снижения быстродействия в малом.
Передаточная функция контура скорости по возмущению:
Rэ
Rэ
2Т т р(Т т р 1)4Т т р
СеФ нТ м р
СеФнТ м р
з(со)
Wкс
(
р
)
.
(возм)
4Т т р 1
1
2Т т р(Т т р 1)4Т т р 4Т т р 1
1
2Т т р(Т т р 1) 4Т т р
з(cо)
lim Wкc (возм) (р) 0
у
з ( со )
0
Т.к. p 0
, то
Контур скорости с ПИ РС – астатический как по заданию (второго
порядка) так и по возмущению!!!
23.
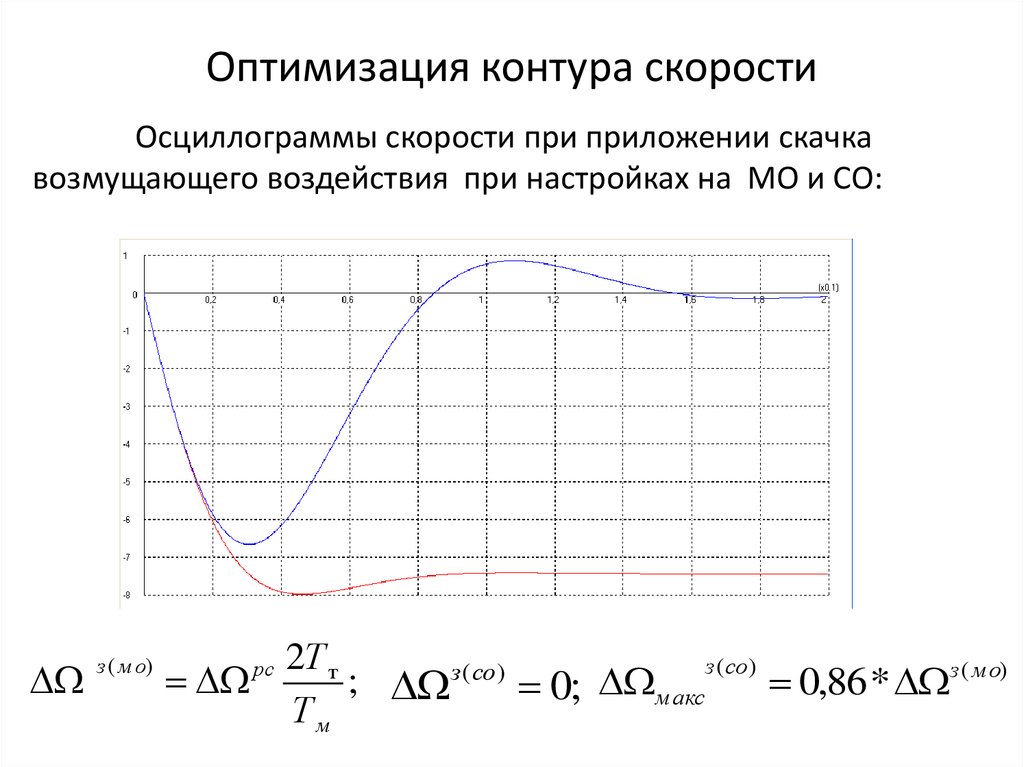
Оптимизация контура скоростиОсциллограммы скорости при приложении скачка
возмущающего воздействия при настройках на МО и СО:
з ( м о)
2Т т
; з ( со ) 0; максз (со ) 0,86 * з ( мо)
Тм
рс
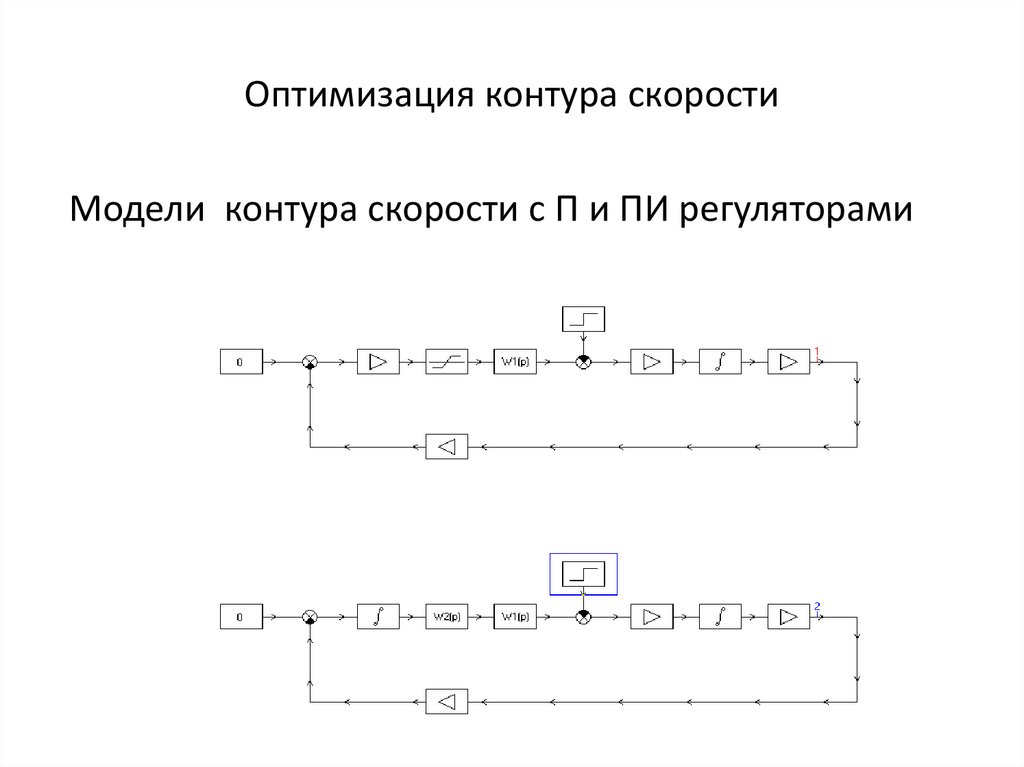
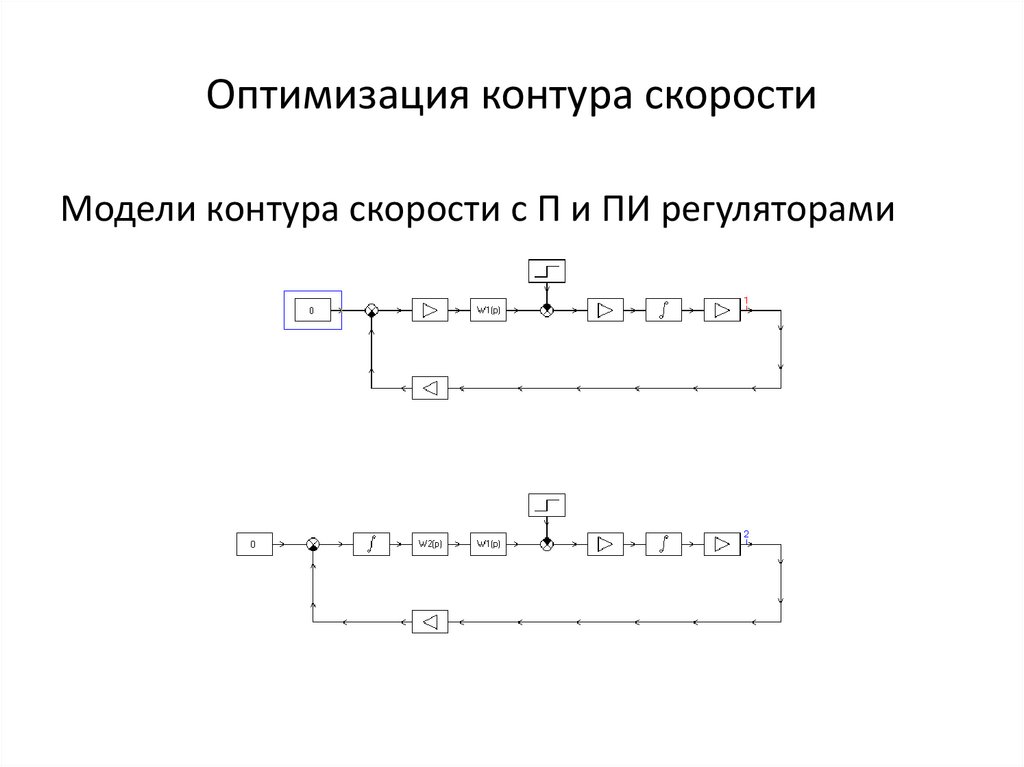
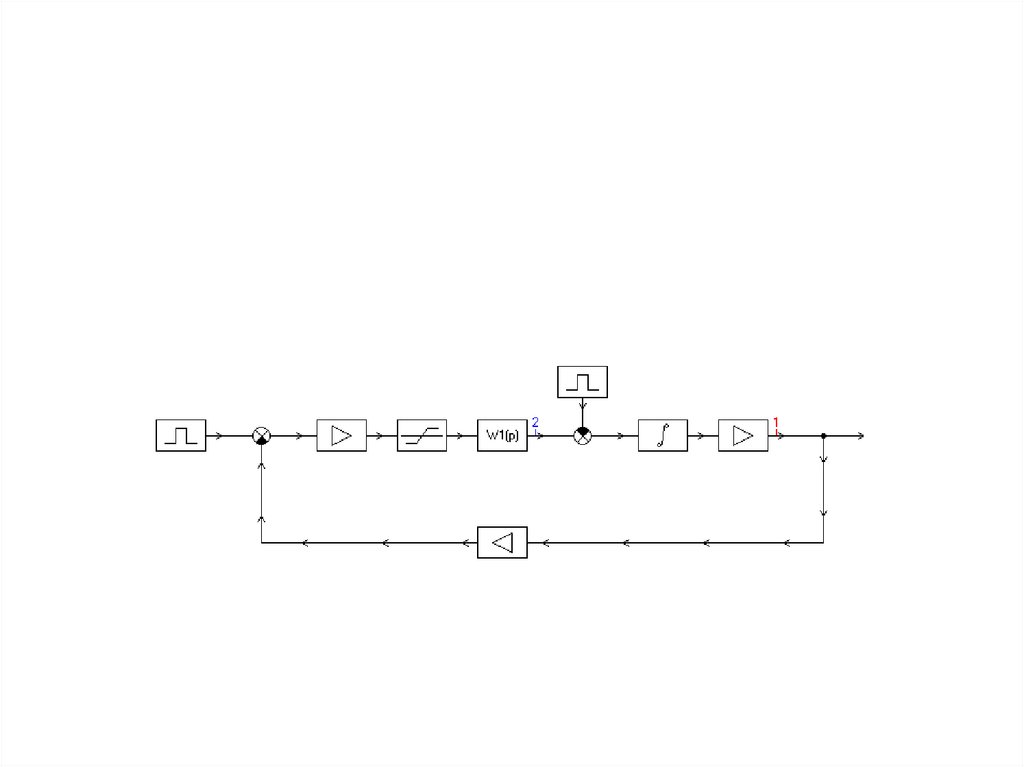
24.
Оптимизация контура скоростиМодели контура скорости с П и ПИ регуляторами
25.
Оптимизация контура скоростиМодели контура скорости с П и ПИ регуляторами