
 physics
physicsSimilar presentations:



")





")
Механическое движение. Лекция 2
1.
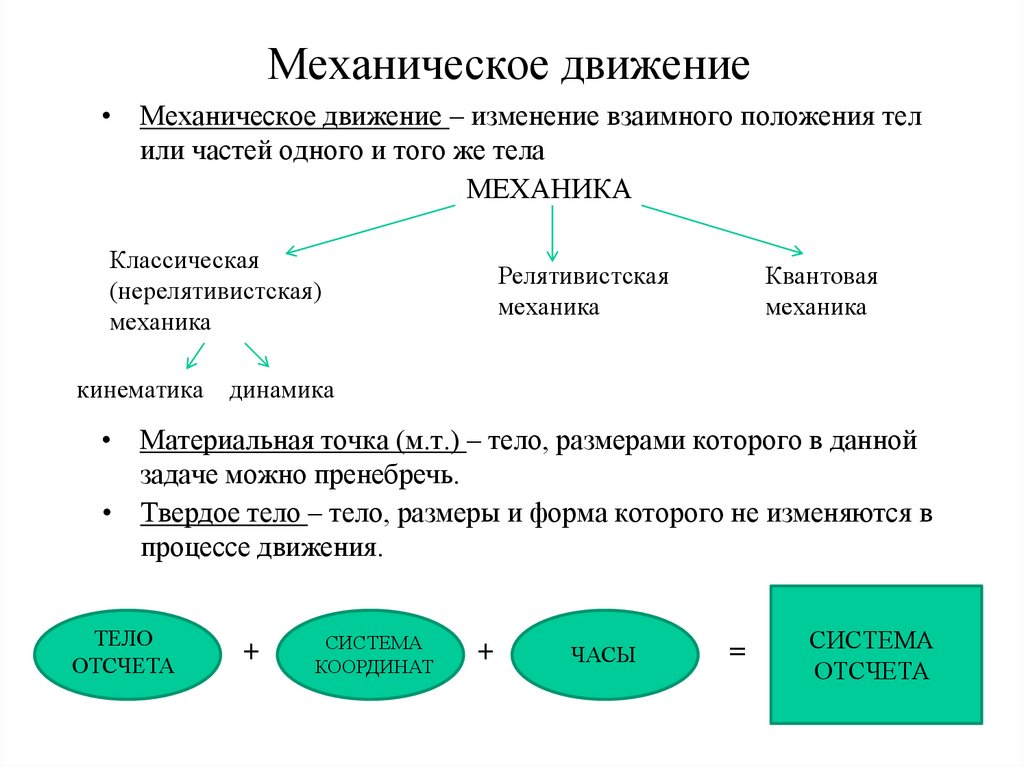
Механическое движение• Механическое движение – изменение взаимного положения тел
или частей одного и того же тела
МЕХАНИКА
Классическая
(нерелятивистская)
механика
Релятивистская
механика
Квантовая
механика
кинематика динамика
• Материальная точка (м.т.) – тело, размерами которого в данной
задаче можно пренебречь.
• Твердое тело – тело, размеры и форма которого не изменяются в
процессе движения.
ТЕЛО
ОТСЧЕТА
+
СИСТЕМА
КООРДИНАТ
+
ЧАСЫ
=
СИСТЕМА
ОТСЧЕТА
2.
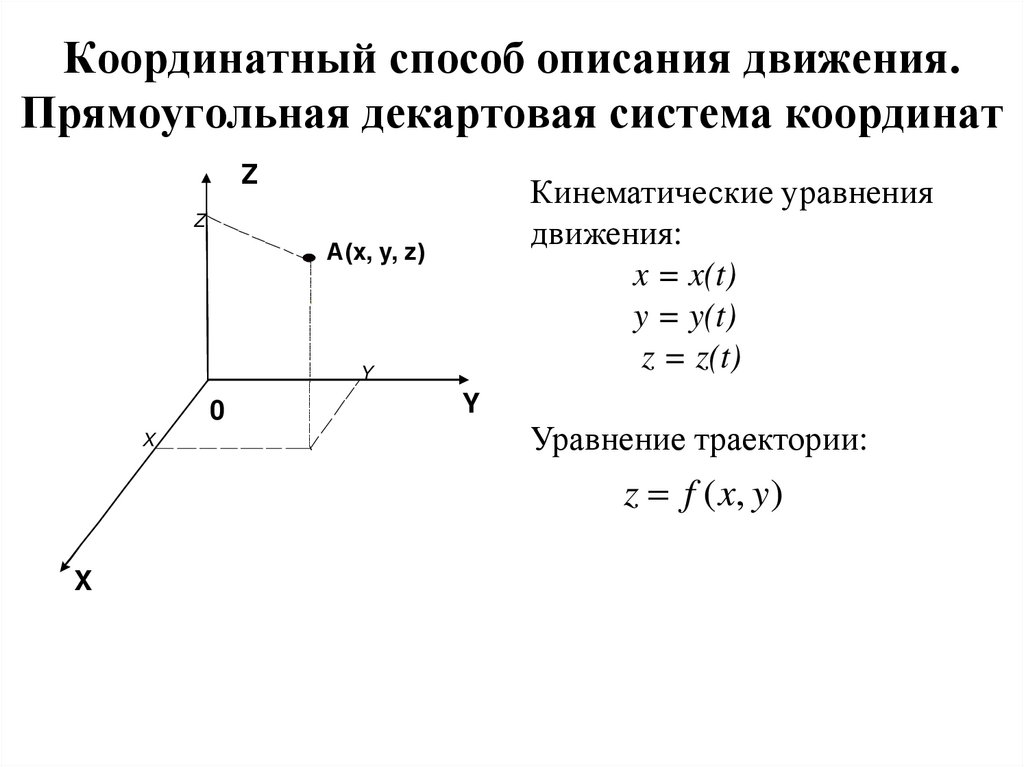
Координатный способ описания движения.Прямоугольная декартовая система координат
Z
Кинематические уравнения
движения:
x = x(t)
y = y(t)
z = z(t)
Z
А(x, y, z)
Y
0
X
Y
Уравнение траектории:
z f ( x, y)
X
3.
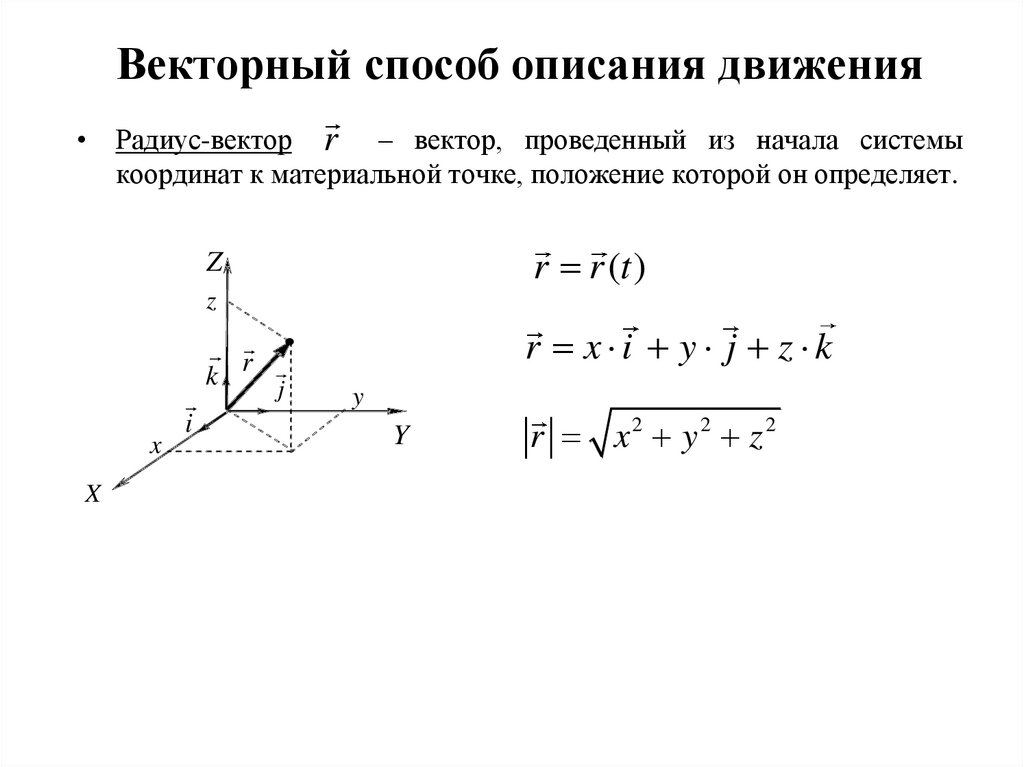
Векторный способ описания движенияr
• Радиус-вектор
– вектор, проведенный из начала системы
координат к материальной точке, положение которой он определяет.
r r (t )
Z
z
x
X
i
r
k
j
r x i y j z k
y
Y
r x2 y 2 z 2
4.
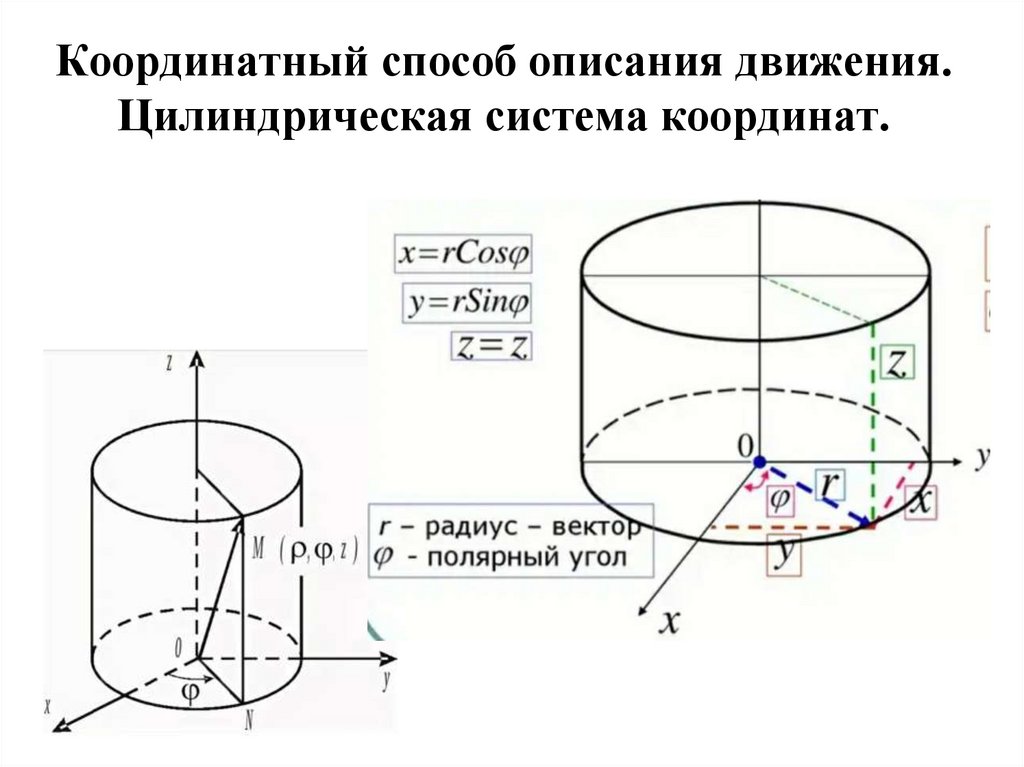
Координатный способ описания движения.Цилиндрическая система координат.
5.
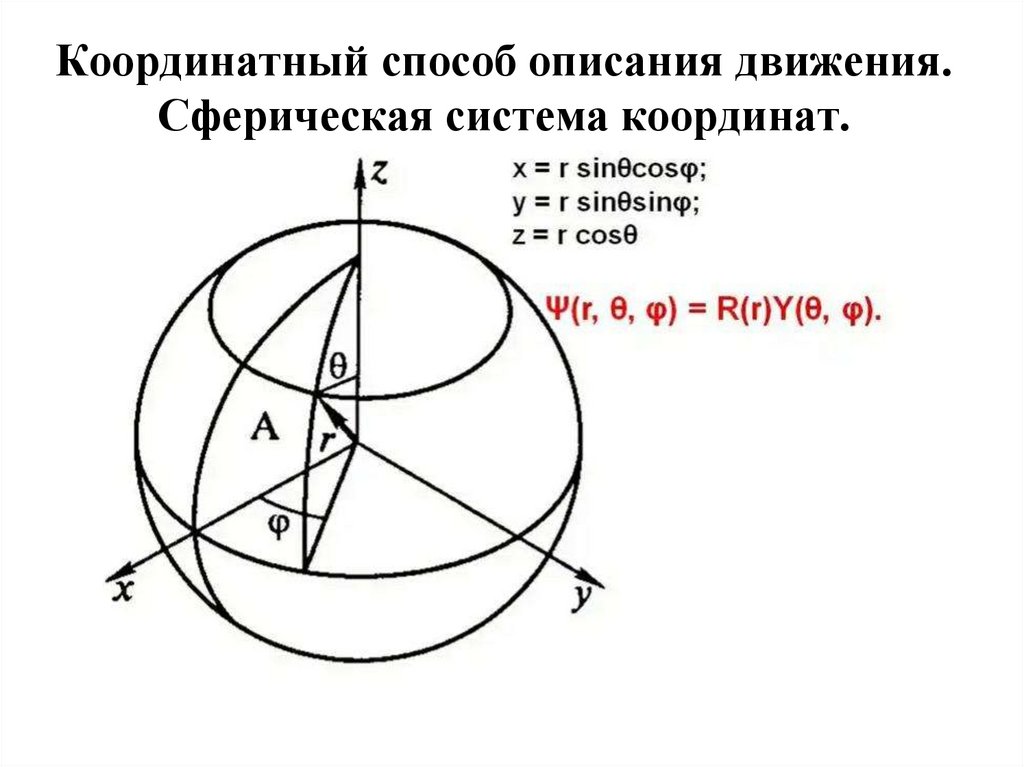
Координатный способ описания движения.Сферическая система координат.
6.
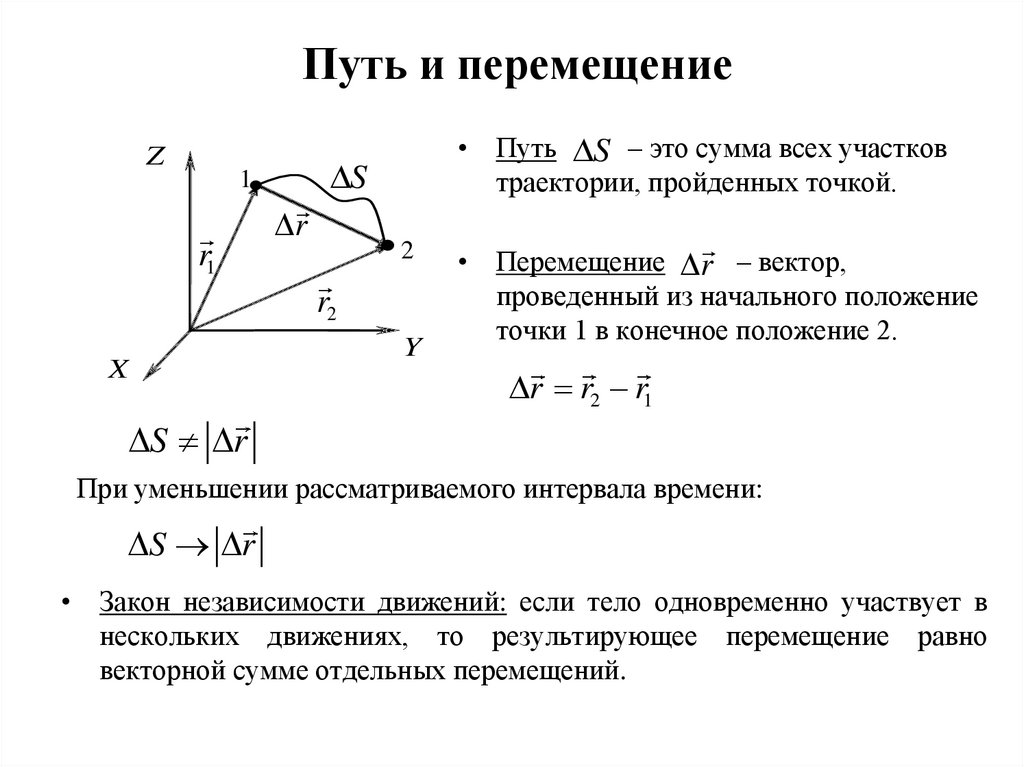
Путь и перемещениеZ
1
r1
X
r
• Путь S – это сумма всех участков
траектории, пройденных точкой.
S
r2
2
Y
• Перемещение r – вектор,
проведенный из начального положение
точки 1 в конечное положение 2.
r r2 r1
S r
При уменьшении рассматриваемого интервала времени:
S r
• Закон независимости движений: если тело одновременно участвует в
нескольких движениях, то результирующее перемещение равно
векторной сумме отдельных перемещений.
7.
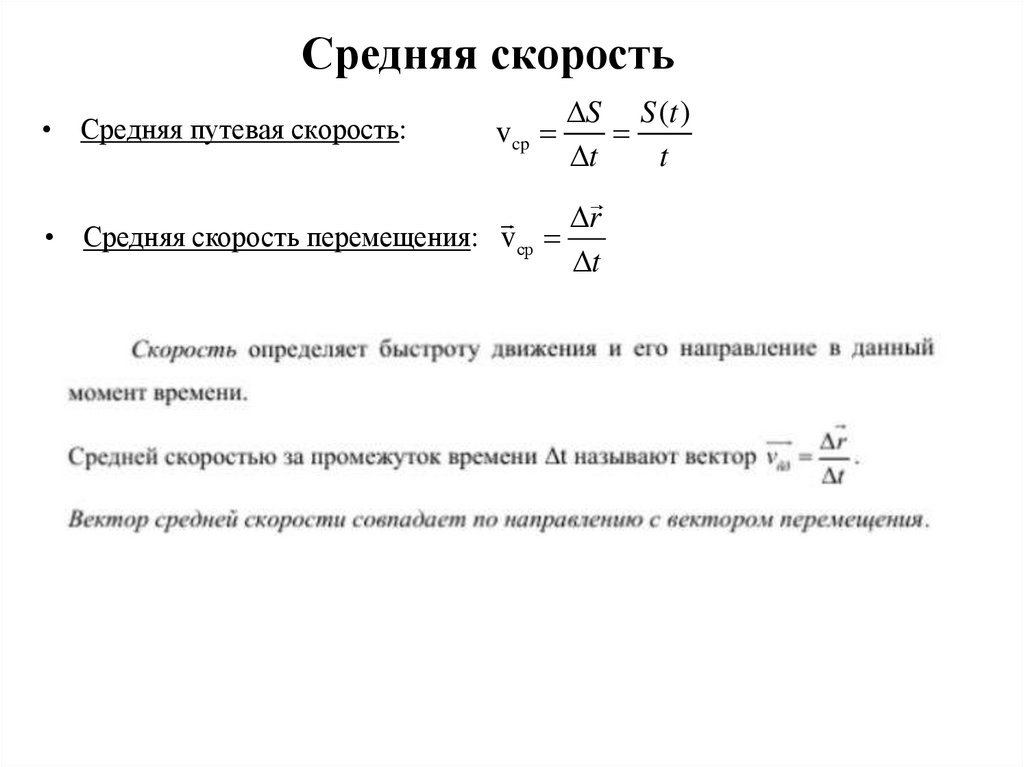
Средняя скорость• Средняя путевая скорость:
S S (t )
vcp
t
t
• Средняя скорость перемещения: vср
r
t
8.
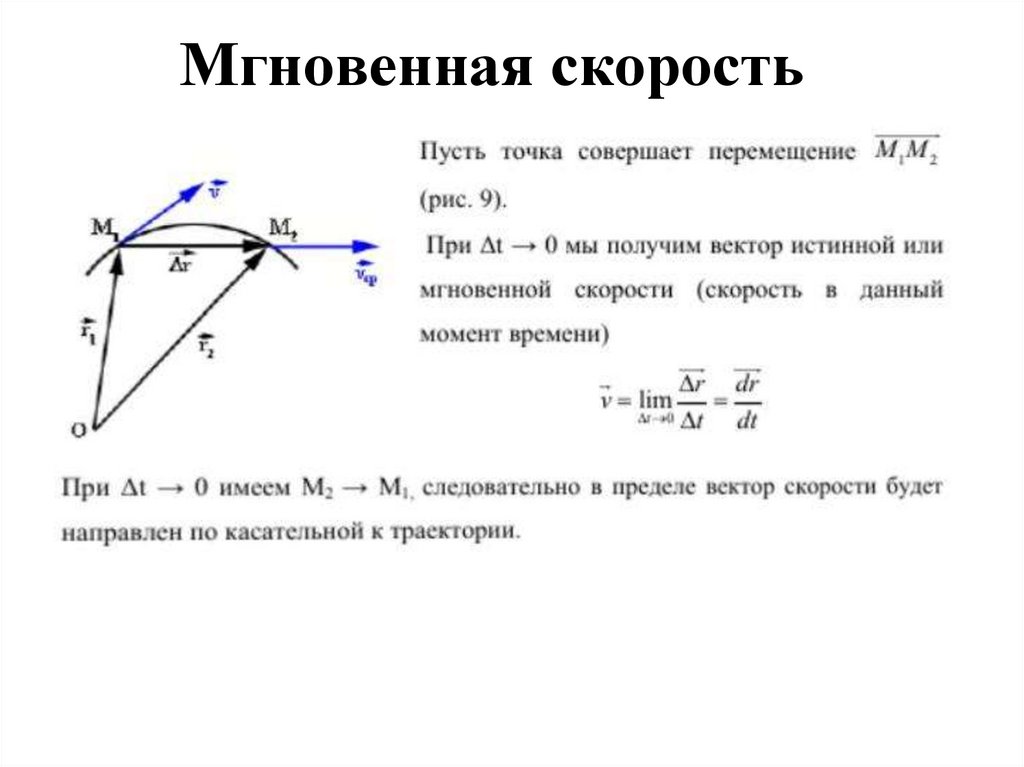
Мгновенная скорость9.
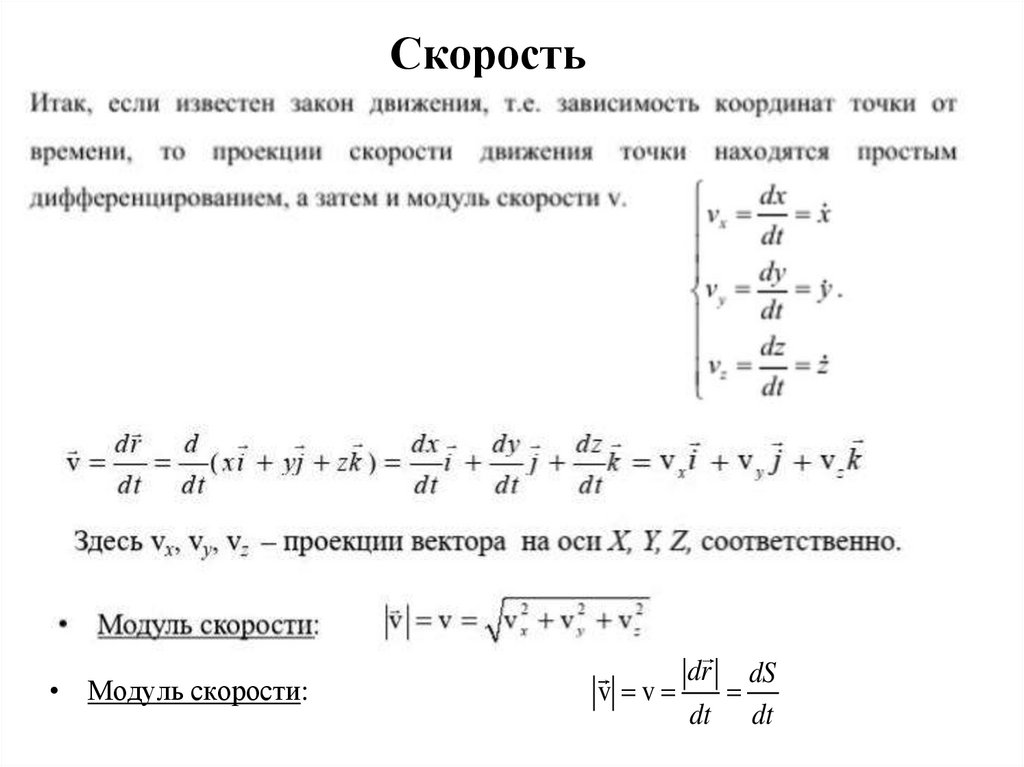
Скорость• Модуль скорости:
dr dS
v v
dt dt