
 и их предшественники")























































 industry
industrySimilar presentations:



")






Геодезическое обеспечение кадастровых работ с использованием GPS технологий. Электронный курс лекций
1. ИНСТИТУТ ГЕИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ И КАДАСТРА КАФЕДРА ГЕОДЕЗИИ Лазарев В.М. ГЕОДЕЗИЧЕСКОЕ ОБЕСПЕЧЕНИЕ КАДАСТРОВЫХ РАБОТ С ИСПОЛЬЗОВАН
ИНСТИТУТ ГЕИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ И КАДАСТРАКАФЕДРА ГЕОДЕЗИИ
Лазарев В.М.
ГЕОДЕЗИЧЕСКОЕ ОБЕСПЕЧЕНИЕ КАДАСТРОВЫХ РАБОТ С
ИСПОЛЬЗОВАНИЕМ GPS ТЕХНОЛОГИЙ
ЭЛЕКТРОННЫЙ КУРС ЛЕКЦИЙ
2. Назначение глобальных систем спутникового позиционирования (ГССП) и их предшественники
ГССП предназначены для определения пространственныхкоординат (позиционирование) и скорости объектов на
поверхности Земли, в околоземном воздушном и космическом
пространстве, а также обеспечения пользователей сигналами
системного времени, привязанного к международным
временным шкалам.
Предшественники современных ГССП:
- радиодальномерные навигационные системы HIRAN, DEKKA
(развивались во время Второй мировой войны для нужд ВВС);
- ГССП 1-го поколения NNSS “Transit” (USA, введена в
эксплуатацию в 1964 г., открыта для гражданского
использования в 1967 г.), “Цикада” (СССР, введена в
эксплуатацию в 1979 г.).
2
3.
Современные глобальные системы спутниковогопозиционирования (ГССП 2-го поколения)
ГЛОНАСС
(Глобальная Навигационная Система)
Разработка системы начата в
середине 1970-х.
Развертывание начато в 1982 г.
Принята в эксплуатацию в 1993 г.
Открыта для гражданского
использования в 1995 г.
GPS или NAVSTAR
(Система Глобального Позиционирования
или Навигационная Система определения
Времени и Расстояния)
Разработка системы начата в 1973
году.
Развертывание начато в 1978 г.
Принята в эксплуатацию в 1995 г.
3
4.
Общая структура ГССП GPS и ГЛОНАССКосмический
сегмент
Сегмент
пользователя
Сегмент контроля
и управления
Наземный
сегмент
5.
Принцип работы системы1. Базовые станции принимают
сигналы ГНСС;
2. Измерительная информация от
базовых станций непрерывно
передается в вычислительный
центр;
3. В вычислительном центре
выполняется обработка
информации и формирование
данных для работы в режимах
реального времени и
постобработки;
4. Пользователи подключаются к
вычислительному центру и
получают необходимые
5
данные.
6.
Основные преимущества системы- Задание единого координатно-временного пространства
(создание геодезической основы);
- Согласованность результатов топографо-геодезических
работ;
- Автоматизированное обеспечение данными для работы в
режиме постобработки и в режиме реального времени;
- Повышение производительности выполнения всех видов
геодезических, кадастровых и строительных работ;
- Сокращение проектных расходов.
6
7.
Две системы координат…Две полевые бригады…
Отсутствие общей
инфраструктуры…
8.
Основные группы пользователейГеодезия и маркшейдерия
Строительство
Коммунальное хозяйство
Кадастровые работы
Точное земледелие
Гидрография и портовые операции
Деформационный мониторинг
Управление строительной техникой
Службы быстрого реагирования
8
9.
Основные этапы построениясети базовых станций
1. Рекогносцировочные работы;
2. Закладка пунктов сети базовых станций;
3. Установка Вычислительного Центра и организация
каналов передачи данных;
4. Выполнение геодезических работ по определению
координат базовых станций.
9
10.
Общие требования к установке базовых станцийОткрытый
небосвод
GNSS Choke
Ring Антенна
Молниезащита
Надежное
закрепление
пункта
Защита и
ограниченный
доступ
GNSS приемник, электропитание,
средства коммуникации,
антивандальные средства …
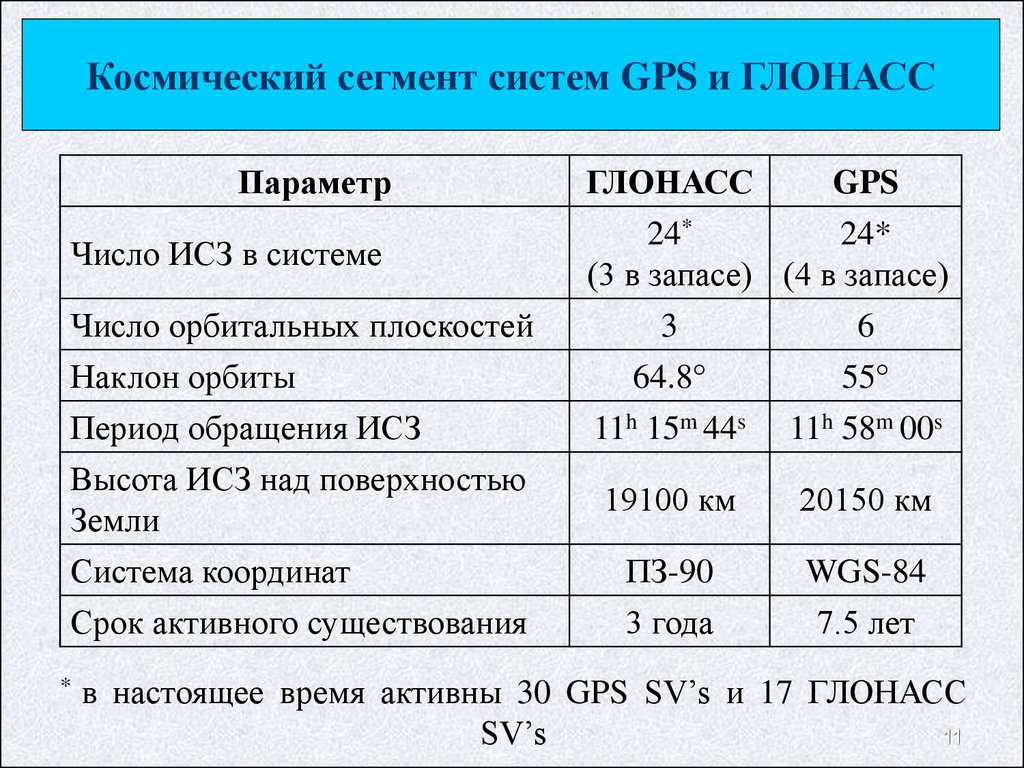
11.
Космический сегмент систем GPS и ГЛОНАССПараметр
ГЛОНАСС
GPS
Число орбитальных плоскостей
24*
24*
(3 в запасе) (4 в запасе)
3
6
Наклон орбиты
Период обращения ИСЗ
64.8
11h 15m 44s
55
11h 58m 00s
19100 км
20150 км
ПЗ-90
3 года
WGS-84
7.5 лет
Число ИСЗ в системе
Высота ИСЗ над поверхностью
Земли
Система координат
Срок активного существования
*
в настоящее время активны 30 GPS SV’s и 17 ГЛОНАСС
11
SV’s
12.
Космический сегмент систем GPS и ГЛОНАССПодсистема космических аппаратов ГЛОНАСС
Подсистема космических аппаратов GPS
12
13.
Космический сегмент систем GPS и ГЛОНАССGPS satellite, BLOCK IIR
Запуск спутника GPS,
BLOCK IIR
GPS satellite, BLOCK IIA
ГЛОНАСС
спутник
13
14.
Сегмент контроля и управления системой GPSКолорадоСпрингс
о. Гавайи
о. Вознесения
о. ДиегоГарсия
атолл
Кваджалейн
14
15.
Сегмент контроля и управления системой ГЛОНАСС15
16.
Европейская глобальная навигационная система GALILEO(планируется к вводу в эксплуатацию в 2013г.)
Параметр
Значение
GPS
Число ИСЗ в системе
30
24*
(4 в запасе)
Число орбитальных плоскостей
Наклон орбиты
Высота ИСЗ над поверхностью
Земли
Система координат
Срок активного существования
3
6
54
55
22966 км
20150 км
GTRS
12 лет
WGS-84
7.5 лет
*в
настоящее время выведены на орбиту 2 SV’s
16
17.
Общий вид спутника системы GALILEO18.
Наземный сегмент (сеть IGS)18
19.
1920.
2021.
Принципы определения местоположения припомощи ГССП GPS и ГЛОНАСС
Zr
ρ rs
Z
Фундаментальное уравнение
космической геодезии (ФУКГ)
r
r ρ rs ПMR R. (1)
R
R
O
X
Xr
Yr
Or
Y
Матрица масштабов
вдоль осей координат
M diag ( X , Y , Z ).
Матрица разворота референцной
СК (Xr, Yr, Zr) относительно
геоцентрической СК (X, Y, Z)
1
П 1
.
1
21
22.
Принципы определения местоположения припомощи ГССП GPS и ГЛОНАСС
При П M E и R 0 уравнение (1) приводитсяк виду :
ρ rs r R. (2)
Записывая уравнение (2) по модулю для фиксированного момента t получаем :
rs ( X S X r ) 2 (YS Yr ) 2 ( Z S Z r ) 2 . (3)
Геометрическая интерпретация
(пространственная линейная засечка)
P1
O2
PO
O1
P2
Абсолютное
позиционирование
O1 ( X 1 X O ) 2 (Y1 YO ) 2 ;
O 2 ( X 2 X O ) 2 (Y2 YO ) 2 ;
O3
P3
O3 ( X 3 X O ) 2 (Y3 YO ) 2 .
22
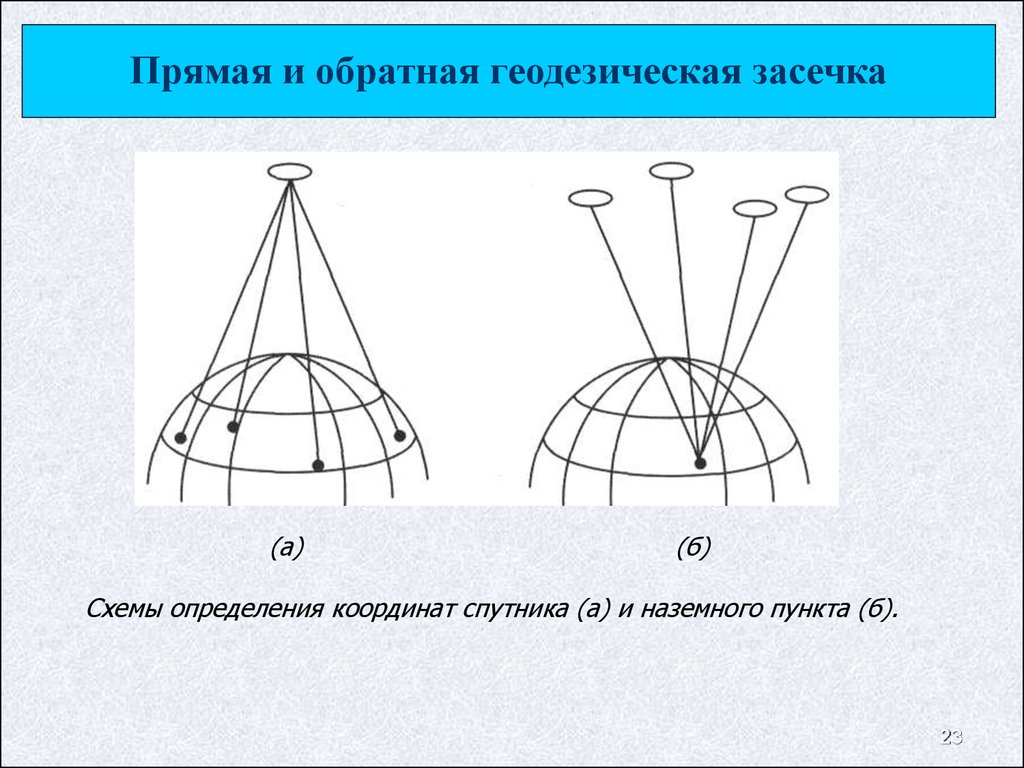
23.
Прямая и обратная геодезическая засечка(а)
(б)
Схемы определения координат спутника (а) и наземного пункта (б).
23
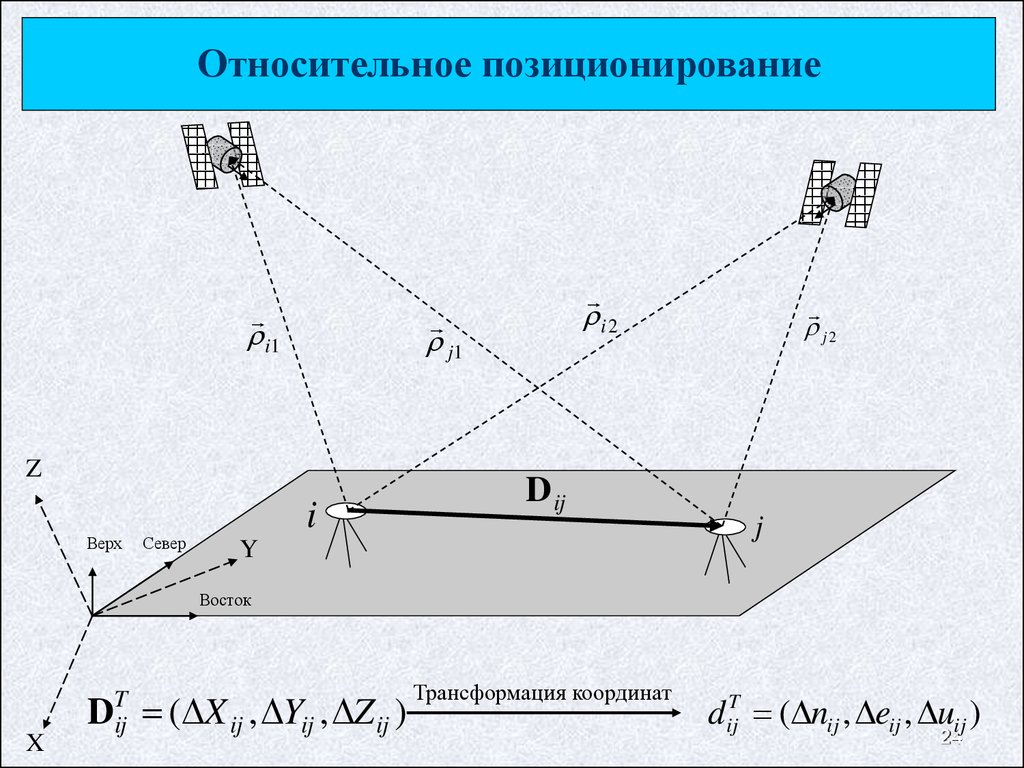
24.
Относительное позиционированиеi1
j1
Z
Верх
Север
i2
i
j2
D ij
j
Y
Восток
X
DTij
( X ij , Yij , Z ij )
Трансформация координат
dijT ( nij , eij , uij )
24
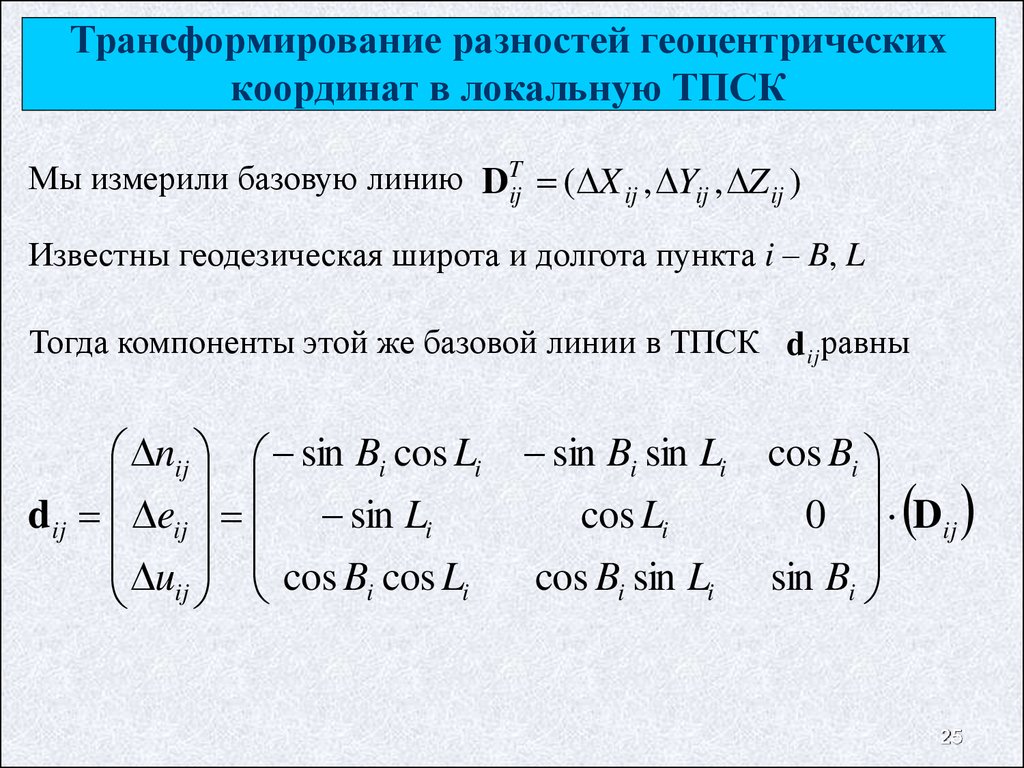
25.
Трансформирование разностей геоцентрическихкоординат в локальную ТПСК
Мы измерили базовую линию DTij ( X ij , Yij , Z ij )
Известны геодезическая широта и долгота пункта i – B, L
Тогда компоненты этой же базовой линии в ТПСК d ij равны
nij sin Bi cos Li
dij eij sin Li
u cos B cos L
i
i
ij
sin Bi sin Li
cos Li
cos Bi sin Li
cos Bi
0 Dij
sin Bi
25
26.
Сигналы, излучаемые спутниками GPS и ГЛОНАССи их назначение
Немодулированный сигнал (несущая)
Величина
сигнала
Вращается с
частотой f
cT ;
A
A0
a A0 sin( t 0 );
Длина волны
сигнала
Амплитуда
сигнала A0
t
0.5
1.0
Время
(фаза)
1
T ;
f
f
.
2
A0
Назначение несущих сигналов:
1. Служат носителями дальномерных кодов, необходимых для получения расстояний
определяемый пункт – спутник (кодовые псевдодальности).
2. Фазы несущих сигналов используются для получения расстояний определяемый пункт –
спутник (фазовые псевдодальности) с наивысшей точностью.
3. Используются для передачи потребителям навигационного сообщения (эфемериды, альманах и
т.д.).
26
27.
Модулирование несущих сигналов в ГССПGPS и ГЛОНАСС
Дальномерные коды и другая необходимая информация,
встраиваются в несущие колебания путем фазовой манипуляции
(разновидность фазовой модуляции)
Принцип генерации фазоманипулированных сигналов
27
28.
Принципы формирования и виды сигналов,излучаемые спутниками GPS
Упрощенная схема формирования
радиосигналов на спутнике GPS
Генератор опорной
частоты
f0=10.23 МГц
154f0
120f0
115f0
f0
f0/10
Несущая частота L1: fL1 =
=1575.42 МГц; λL1=19 см
C/A-code
(fC/A=1.023 МГц)
P-code
(fP=10.23 МГц)
Несущая частота L2: fL2 =
=1227.60 МГц; λL1=24 см
C/A-code
(fP=10.23 МГц)
Несущая частота L5: fL5 =
=1176.45 МГц; λL1=25.5 см
C/A-code
Навигационное сообщение (эфемериды, поправки к часам спутника, альманах,
коэффициенты ионосферной модели, информация о работоспособности спутников )
Дальномерные коды
C/A-code – грубый код или код открытого доступа
P-code – точный или защищенный код
Режимы доступа
AS – режим дополнительного шифрования P-code
SA – режим селективного доступа (отменен в 200128
г.)
29.
Принципы формирования и виды сигналов,излучаемые спутниками ГЛОНАСС
Упрощенная схема формирования
радиосигналов на спутнике ГЛОНАСС
Генератор опорной
частоты
f0=5.11 МГц
f0
f0/10
Полоса несущих частот L1:
fL1(k) =1602 + k ∙ 0.5625 МГц,
где k = 1, 2, …, 24.
СТ-code
ВТ-код
(fСТ = 0.511МГц) (fВТ = 5.11 МГц)
Полоса несущих частот L2:
fL2 = 1246 + k ∙ 0.4375 МГц,
где k = 1, 2, …, 24.
(fP = 10.23 МГц)
Навигационное сообщение (эфемериды, поправки к часам спутника, альманах,
коэффициенты ионосферной модели, информация о работоспособности спутников )
Дальномерные коды
СТ – код стандартной точности (аналог C/A-code);
ВТ – точный код;
Режимы доступа
ограничения отсутствуют
29
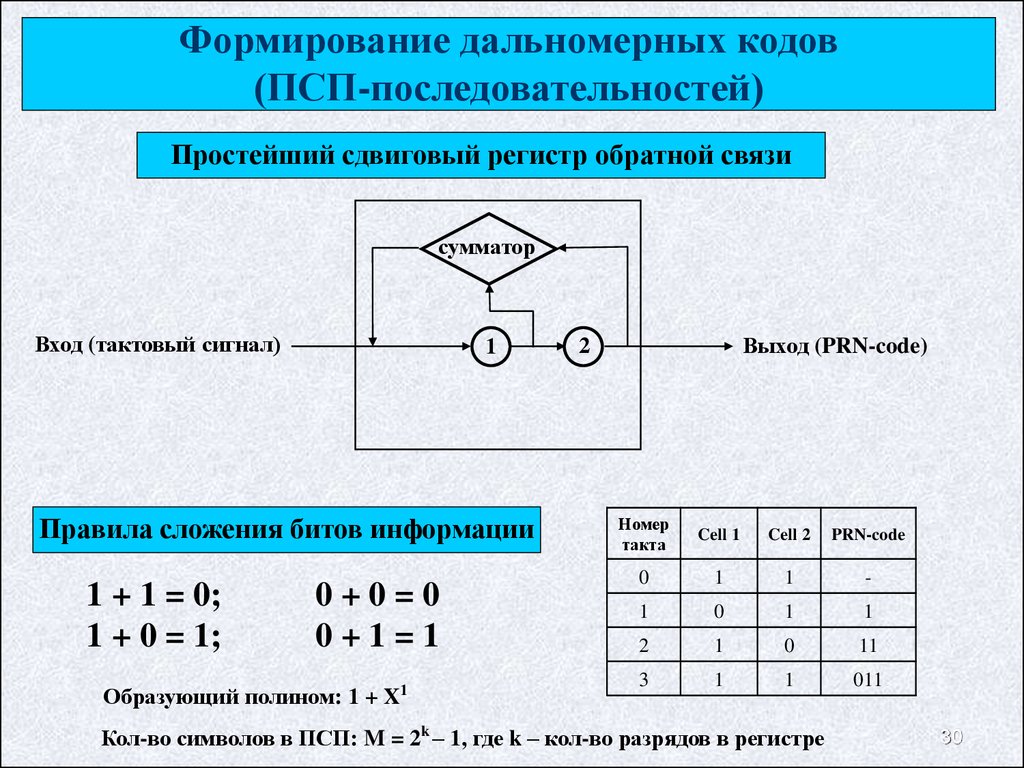
30.
Формирование дальномерных кодов(ПСП-последовательностей)
Простейший сдвиговый регистр обратной связи
сумматор
Вход (тактовый сигнал)
1
Правила сложения битов информации
1 + 1 = 0;
1 + 0 = 1;
0+0=0
0+1=1
Образующий полином: 1 + X1
Выход (PRN-code)
2
Номер
такта
Cell 1
Cell 2
PRN-code
0
1
1
-
1
0
1
1
2
1
0
11
3
1
1
011
Кол-во символов в ПСП: M = 2k – 1, где k – кол-во разрядов в регистре
30
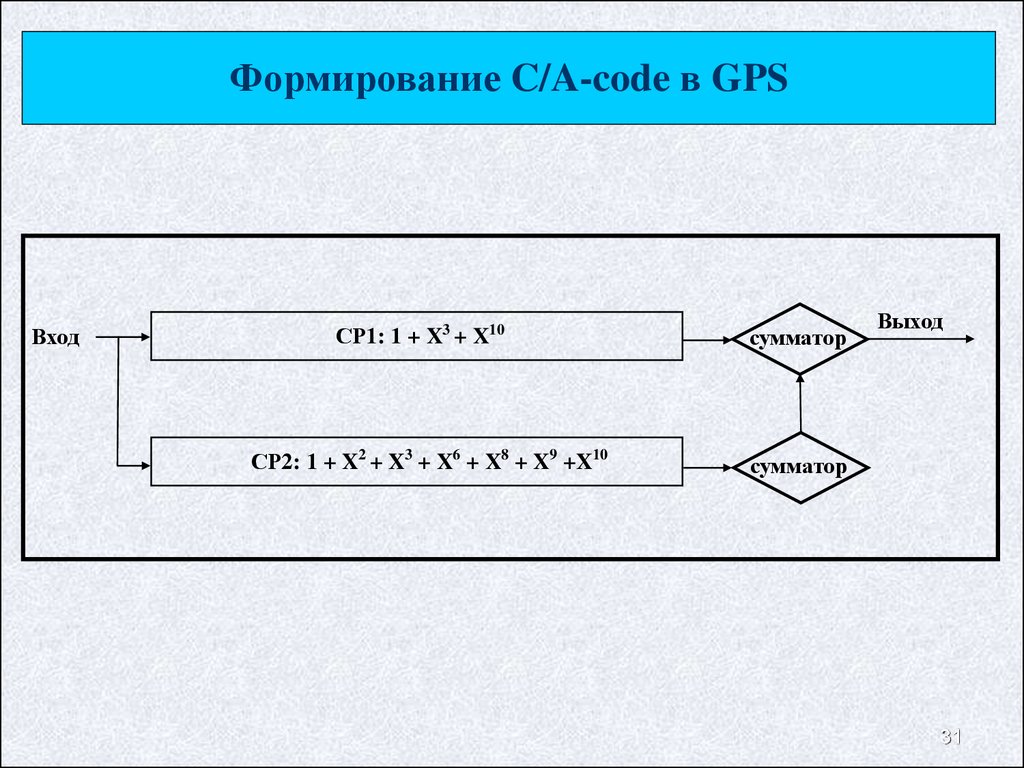
31.
Формирование C/A-code в GPSВход
СР1: 1 + X3 + X10
СР2: 1 + X2 + X3 + X6 + X8 + X9 +X10
сумматор
Выход
сумматор
31
32.
Пропускание радиоволн атмосферой Земли1.0
0.5
0.0
1мм
1см
1дм
1м
10м
32
33.
Системы времени, используемые в ГССПGPS и ГЛОНАСС
Системное время GPS и ГЛОНАСС не совпадает с международными шкалами времени TAI
(Time Atomic International), UT (Universal Time), UTC (Universal Time Coordinated). Для
перехода от системного времени GPS (GPST) и ГЛОНАСС (GLONASST) к UTC необходимо
использовать формулы:
GPST=UTC+nS,
GLONASST=UTC+3h 00s,
где nS – поправка, вводимая в GPST. Системное время GPS и ГЛОНАСС корректируется в
последнюю секунду 31 декабря или 30 июня, или в обе даты, когда расхождение UTC и UT1
(UT, исправленное за смещение мгновенного полюса Земли относительно его среднего
положения) превышает 0.9 с.
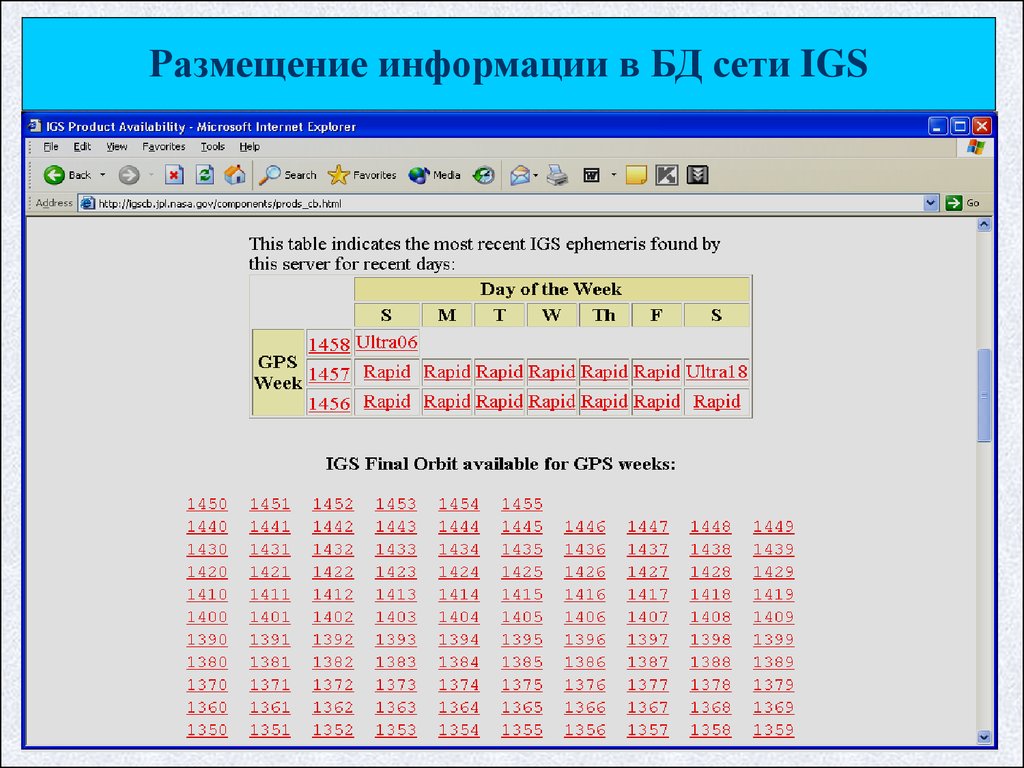
За рубежом принято идентифицировать информацию, хранящуюся в БД и связанную с
ГССП GPS и ГЛОНАСС, в соответствии с номером GPS недели (GPS week) и порядковым
номером дня в ней. Счет GPS недель ведется с 6.01.1980 г. Для вычисления GPS week
используется формула:
GPSweek=int[(JD-2444244.5)/7],
JD=int[365.25y]+int[30.6001(m+1)]+D+UT/24+1720981.5,
y=Y-1 and m=M+12 if M<=2;
y=Y and m=M
if M>2;
Например, файл точных эфемерид, соответствующий 17.12.2007 г. и хранящийся в БД сети
IGS, получит наименование: igs14581.sp3.Z.
33
34.
Размещение информации в БД сети IGS34
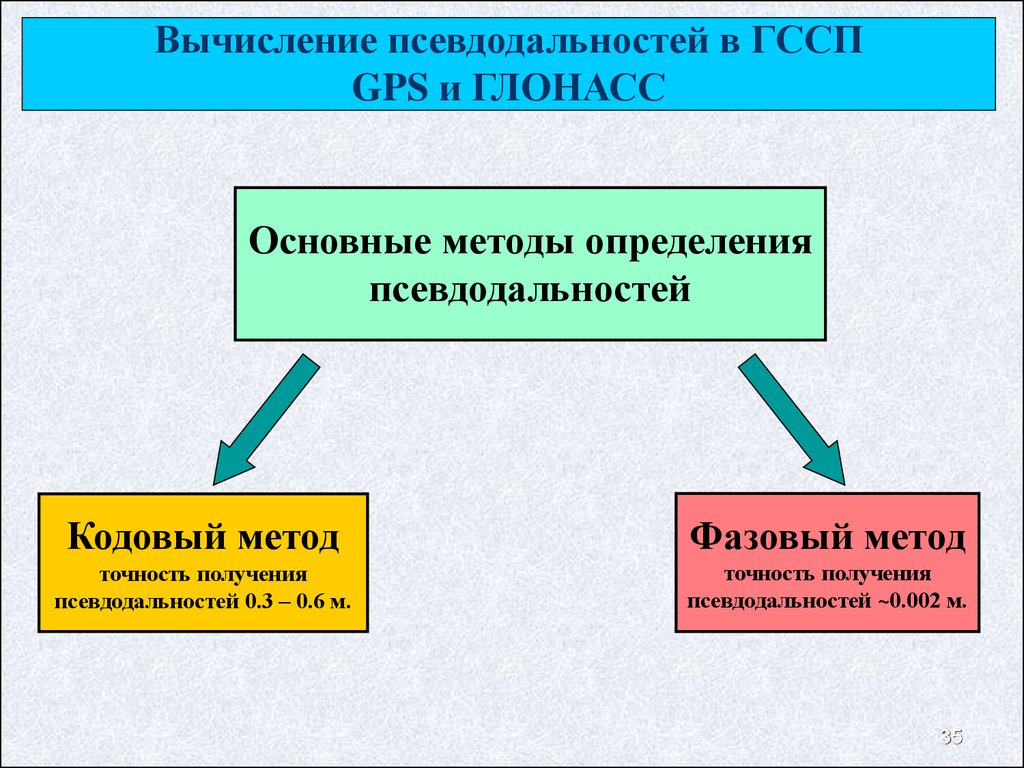
35.
Вычисление псевдодальностей в ГССПGPS и ГЛОНАСС
Основные методы определения
псевдодальностей
Кодовый метод
Фазовый метод
точность получения
псевдодальностей 0.3 – 0.6 м.
точность получения
псевдодальностей ~0.002 м.
35
36.
Кодовый методТеоретически:
rs= сΔτ = с [NTп + (m + ф) Tm]. (4)
Часы спутника ts
Излученный
спутниковый
сигнал (ПСП)
Учитывая, что λ = cТ, получаем
rs = Nλп + (m + ф) λm. (5)
Практически, в простейшем случае имеем
Prs = c(tr+ tr) – c(ts + ts) =
= c(tr – ts) + c( tr – ts) = rs + c tr – c ts.
(6)
Принятый спутниковый сигнал
Сигнал, сгенерированный в приемнике
Часы приемника tr
Δτ = (Ts – Tr)
36
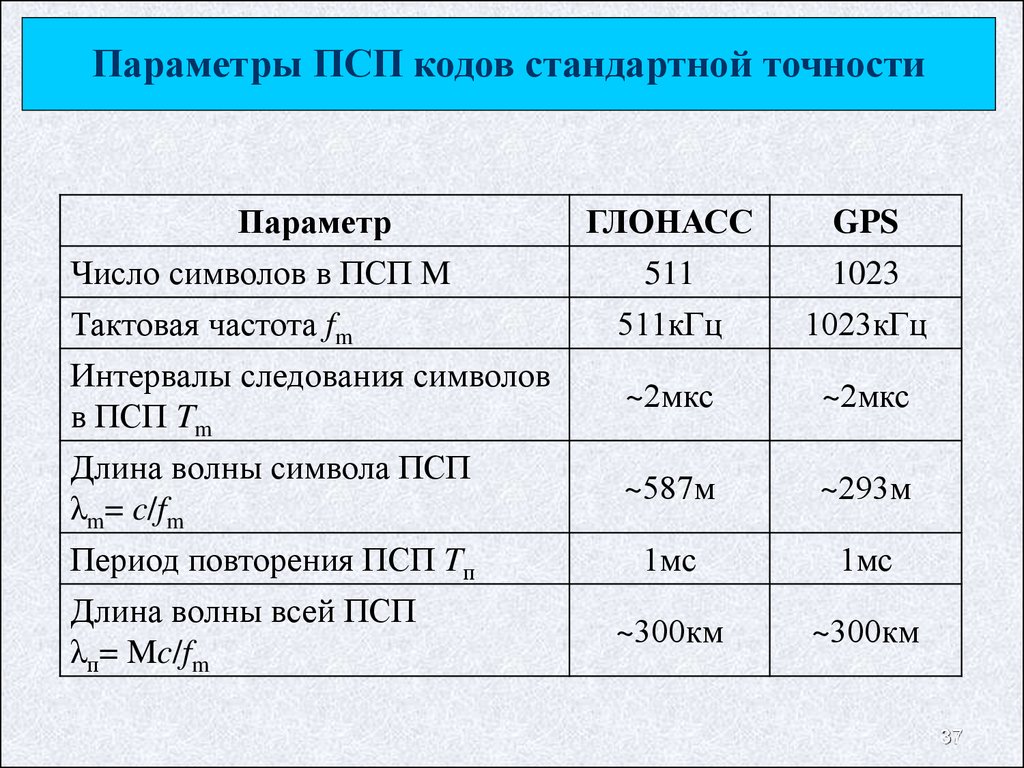
37.
Параметры ПСП кодов стандартной точностиПараметр
Число символов в ПСП M
Тактовая частота fm
Интервалы следования символов
в ПСП Tm
Длина волны символа ПСП
λm= c/fm
Период повторения ПСП Tп
Длина волны всей ПСП
λп= Mc/fm
ГЛОНАСС
511
GPS
1023
511кГц
1023кГц
~2мкс
~2мкс
~587м
~293м
1мс
1мс
~300км
~300км
37
38.
Фазовый методТеоретически:
2
r s (t r t s ) 2 f
c . (7)
Часы спутника ts
Излученный
спутниковый
сигнал (несущая)
Учитывая что rs c , получаем из (7)
rs
( N Ф) N Ф N dP. (8)
2
Практически, в простейшем случае имеем
r s
rs r s ;
2
2
2
Prs N dP rs Pr Ps . (9)
Принятый спутниковый сигнал
Часы приемника tr
Δτ = (Ts – Tr)
Сигнал, сгенерированный в приемнике
38
39.
Источники ошибок, оказывающие влияние нарезультаты позиционирования при помощи
ГССП GPS и ГЛОНАСС
Случайные («белый шум»)
влияние минимизируется путем
осреднения результатов измерений
Систематические («смещения»)
неустранимы путем осреднения
результатов измерений
1. Ошибки, связанные с погрешностями исходных данных, главенствующая роль в которых
принадлежит неточностям эфемерид спутников, определяющих их положение в пространстве в любой
момент времени.
2. Ошибки, обусловленные влиянием внешней среды на распространение дальномерного сигнала. К
ним относятся ионосферные и тропосферные задержки, отражение радиоволн от окружающих предметов
(многолучевость или многопутность), препятствия на пути сигнала, релятивистские эффекты.
3. Нестабильность работы опорного генератора спутника. Задержки сигнала в аппаратуре спутника и
приемника, неточность знания положения фазового центра антенны приемника.
4. Геометрический фактор – влияние геометрии взаимного расположения наблюдаемых спутников на
результаты позиционирования.
Существуют и другие ошибки, не относящиеся ни к одной из перечисленных групп, например, ошибки
трансформирования результатов позиционирования из системы координат WGS-84 в ПЗ-90 и т.д.
39
40.
Влияние ошибок эфемерид спутников GPS иГЛОНАСС на точность позиционирования
b(км)
b
R
25000 (км)
b (мм)
ΔR(м)
b(км)
2.50
10
1
2.50
100
10
2.50
1000
100
0.25
100
1
0.25
1000
10
0.05
100
-
0.05
1000
0.5
40
41.
Атмосферная рефракция0 – 50 км
Земля
50 – 1000 км
41
42.
Влияние ионосферы на результаты GPS и ГЛОНАССизмерений
Искажение псевдодальности, обусловленное влиянием ионосферы
1 40.3
k
TVEC
. (10)
2
2
cos z f
f
δPIono может принимать значения от 0.15 до 50 м. При отсутствии учета
ионосферной рефракции базовые линии оказываются преуменьшенными на
величину 0.08TVEC [ppm].
PIono
Моделирование ионосферной рефракции
(модель Джона Клобушара)
t Iono A1 A2 cos
2 (t A3 )
. (11)
A4
А1 = 5ns, А2 – амплитуда, А3 – фаза, А4 – период функции δtIono .
42
43.
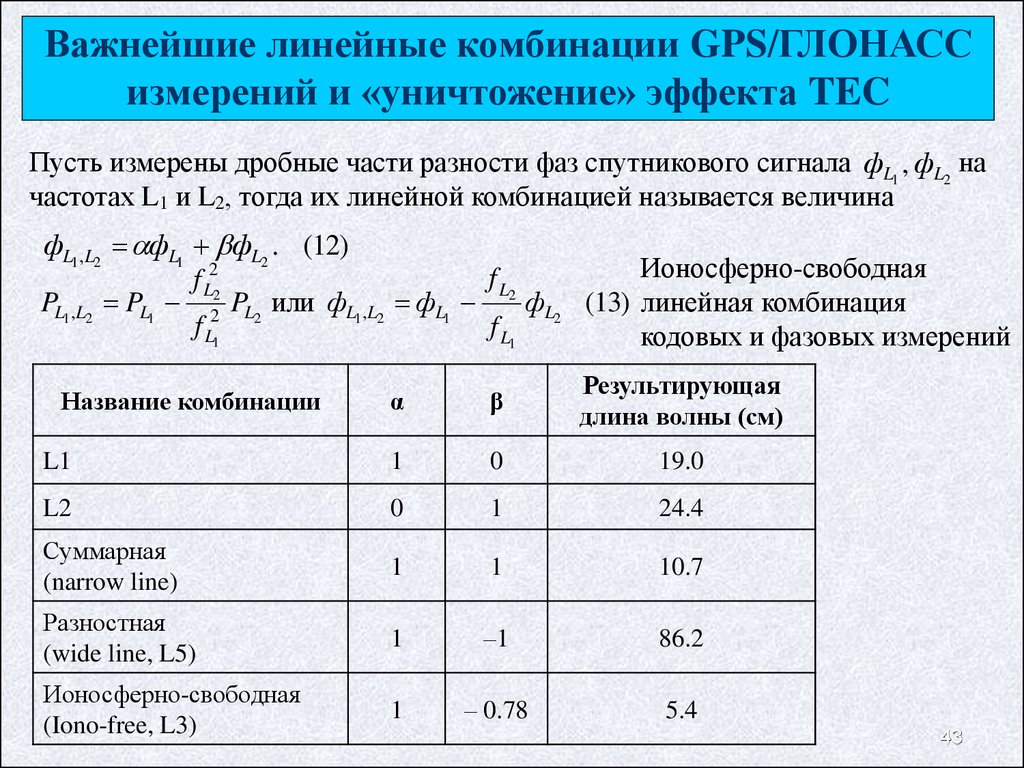
Важнейшие линейные комбинации GPS/ГЛОНАССизмерений и «уничтожение» эффекта TEC
Пусть измерены дробные части разности фаз спутникового сигнала фL1 , фL2 на
частотах L1 и L2, тогда их линейной комбинацией называется величина
фL1 ,L2 фL1 фL2 . (12)
Ионосферно-свободная
f L2
f L22
PL1 ,L2 PL1 2 PL2 или фL1 ,L2 фL1
фL2 (13) линейная комбинация
f L1
f L1
кодовых и фазовых измерений
α
β
Результирующая
длина волны (см)
L1
1
0
19.0
L2
0
1
24.4
Суммарная
(narrow line)
1
1
10.7
Разностная
(wide line, L5)
1
–1
86.2
Ионосферно-свободная
(Iono-free, L3)
1
– 0.78
5.4
Название комбинации
43
44.
Влияние тропосферы на результаты GPS иГЛОНАСС измерений
Земля
0 – 50 км
Тропосферные
искажения
Абсолютные
δPTropo = 10см
дает
δb = 0.05ppm
Относительные
δPTropo = 1см
дает
δH = 3см
Искажение псевдодальности, обусловленное
влиянием тропоферы, может изменяться в
пределах от 2.4м (z = 0º) до 24.2м (z = 85º).
Условно тропосфера подразделяется на два
слоя – «сухой» и «влажный».
Искажения в сухом слое:
- составляют 90% от общего искажения
псевдодальности в тропосфере;
- главным образом зависят от давления на
поверхности Земли;
- медленно изменяются со временем (1см/6ч).
Искажения во влажном слое:
- по величине < 40 см;
- главным образом зависят от концентрации
водяных паров в приземном слое атмосферы;
- быстро изменяются со временем.
44
45.
Учет влияния тропосферы на результатыGPS и ГЛОНАСС измерений
Методы учета
тропосферной рефракции
Моделирование
тропосферы
Оценка параметров
тропосферы
(менее трудоемко и более
просто, но менее точно)
(более трудоемко и сложно, но более
точно)
45
46.
Моделирование тропосферыК настоящему времени разработано большое количество моделей тропосферы,
например, модели Хопфилда (Hopfield,1969), Саастамоинена (Saastamoinen,
1973) и др. Все модели строятся на основе общей формулы
PTropo f dry(z) Pdry (0) f wet (z) Pwet (0). (13)
В формуле (13) величины δPdry, δPwet вычисляются с использованием
информации о температуре T, давлении P и влажности ε в пункте
наблюдений. Эта информация может быть получена путем экстраполяции
стандартных значений T, P и ε в пункте наблюдений или путем
метеорологических наблюдений в GPS/ГЛОНАСС пункте.
Оценивание параметров тропосферы
Искажение псевдодальности из-за влияния тропосферной рефракции может
рассматриваться как кусочно-непрерывная линейная функция, либо как
случайный (стохастический) процесс. Во втором случае для оценки
параметров тропосферы используется фильтр Кальмана, а в первом случае
используется формула
PTropo f apr(z) Papr f(z) P(t). (14)
46
47.
Влияние эффекта многолучевости на результатыGPS/ГЛОНАСС измерений
Антенна
h
θ
Поверхность
θ
θ
h
Отображение
антенны
Излишне
пройденный
сигналом путь
θ
Переотражение сигнала может привести к
ошибкам в измерении псевдодальностей
по коду и фазе несущей до 20м (код) и
несколько см (фаза). Особенно ярко
эффект многолучевости проявляется при
наблюдении НИСЗ с малыми углами
возвышения.
При увеличении высоты антенны над
поверхностью величина искажений
растет, но период уменьшается и
наоборот.
Эффект многолучевости слабо поддается
моделированию, но хорошо осредняется за
длительный период времени или
фильтруется сидерическим фильтром.
Хорошо себя зарекомендовали плоские
экраны-отсекатели и экраны типа chokering.
47
48.
Пример плоского экрана-отсекателя иэкранов типа Choke-Ring
Влияние многолучевости на результаты
обработки фазовых GPS измерений
48
49.
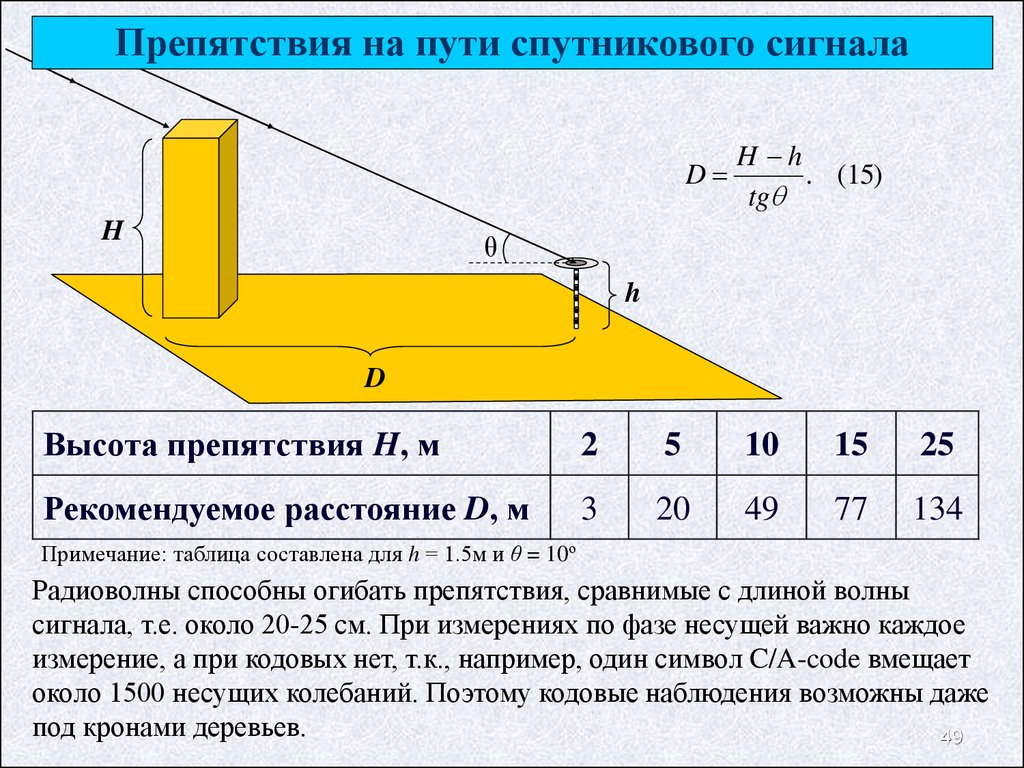
Препятствия на пути спутникового сигналаD
H
H h
. (15)
tg
θ
h
D
Высота препятствия H, м
2
5
10
15
25
Рекомендуемое расстояние D, м
3
20
49
77
134
Примечание: таблица составлена для h = 1.5м и θ = 10º
Радиоволны способны огибать препятствия, сравнимые с длиной волны
сигнала, т.е. около 20-25 см. При измерениях по фазе несущей важно каждое
измерение, а при кодовых нет, т.к., например, один символ C/A-code вмещает
около 1500 несущих колебаний. Поэтому кодовые наблюдения возможны даже
под кронами деревьев.
49
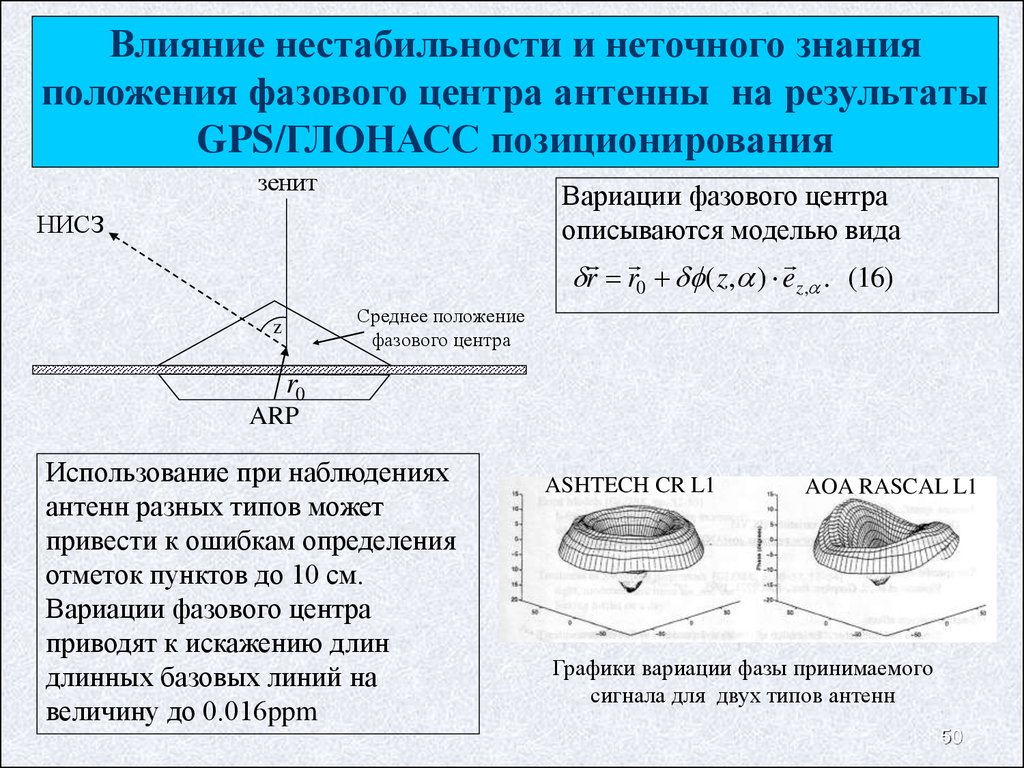
50.
Влияние нестабильности и неточного знанияположения фазового центра антенны на результаты
GPS/ГЛОНАСС позиционирования
зенит
Вариации фазового центра
описываются моделью вида
r r0 ( z, ) ez , . (16)
НИСЗ
Среднее положение
фазового центра
z
r0
ARP
Использование при наблюдениях
антенн разных типов может
привести к ошибкам определения
отметок пунктов до 10 см.
Вариации фазового центра
приводят к искажению длин
длинных базовых линий на
величину до 0.016ppm
ASHTECH CR L1
AOA RASCAL L1
Графики вариации фазы принимаемого
сигнала для двух типов антенн
50
51.
Калибровка GPS/ГЛОНАСС51
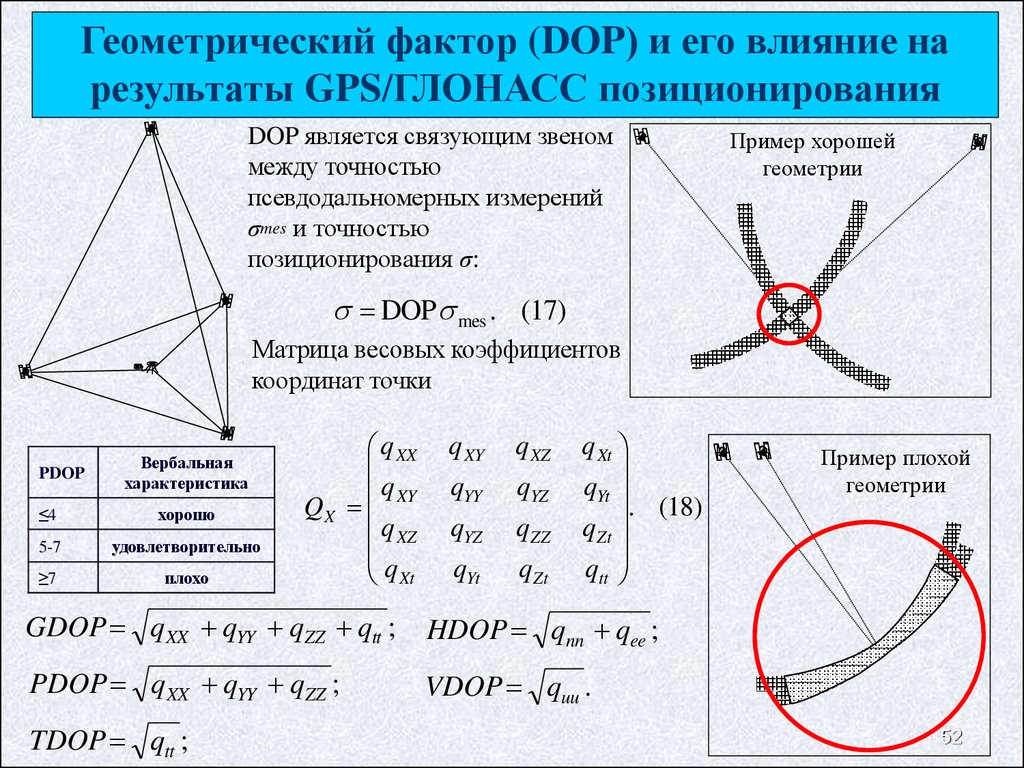
52.
Геометрический фактор (DOP) и его влияние нарезультаты GPS/ГЛОНАСС позиционирования
DOP является связующим звеном
между точностью
псевдодальномерных измерений
σmes и точностью
позиционирования σ:
Пример хорошей
геометрии
DOP mes . (17)
Матрица весовых коэффициентов
координат точки
PDOP
Вербальная
характеристика
≤4
хорошо
5-7
удовлетворительно
≥7
плохо
q XX
q XY
QX
q
XZ
q Xt
q XY
qYY
qYZ
q XZ
qYZ
q ZZ
qYt
q Zt
q Xt
qYt
. (18)
q Zt
qtt
GDOP q XX qYY qZZ qtt ;
HDOP qnn qee ;
PDOP q XX qYY qZZ ;
VDOP quu .
TDOP qtt ;
Пример плохой
геометрии
52
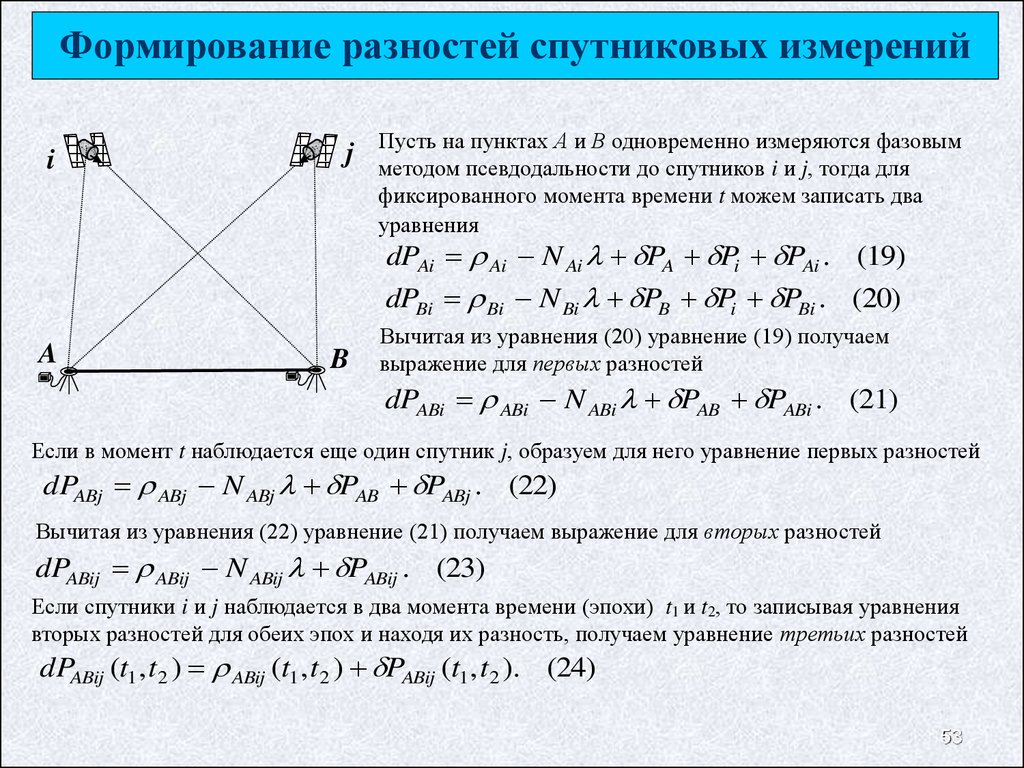
53.
Формирование разностей спутниковых измеренийi
j
Пусть на пунктах А и В одновременно измеряются фазовым
методом псевдодальности до спутников i и j, тогда для
фиксированного момента времени t можем записать два
уравнения
dPAi Ai N Ai PA Pi PAi . (19)
dPBi Bi N Bi PB Pi PBi . (20)
A
B
Вычитая из уравнения (20) уравнение (19) получаем
выражение для первых разностей
dPABi ABi N ABi PAB PABi . (21)
Если в момент t наблюдается еще один спутник j, образуем для него уравнение первых разностей
dPABj ABj N ABj PAB PABj . (22)
Вычитая из уравнения (22) уравнение (21) получаем выражение для вторых разностей
dPABij ABij N ABij PABij . (23)
Если спутники i и j наблюдается в два момента времени (эпохи) t1 и t2, то записывая уравнения
вторых разностей для обеих эпох и находя их разность, получаем уравнение третьих разностей
dPABij (t1 , t 2 ) ABij (t1 , t 2 ) PABij (t1 , t 2 ). (24)
53
54.
Способы и режимы позиционированияАБСОЛЮТНЫЕ
(Single point positioning)
Реального времени
(Real Time)
Точность – десятки
метров, в лучшем
случае 3-5 метров
Постобработка
(Postprocessing)
Точность – метры, в
лучшем случае лучше
метра
ОТНОСИТЕЛЬНЫЕ
ДИФФЕРЕНЦИАЛЬНЫЕ
Статические
Кинематические
(DGPS, DGLONASS)
(Static positioning)
(Kinematic positioning)
Реального
времени
Статика
(Real Time)
Точность – десятки
метров, в лучшем
случае метрыдицеметры
Постобработка
(Postprocessing)
Точность – десятки
метров, в лучшем
случае метрыдицеметры
Стой и иди
(Static)
Точность –
сантиметрымиллиметры
(Stop and Go)
Точность –
сантиметры
Быстрая статика
Непрерывная
(Fast, rapid static)
Точность –
сантиметры
(Continuous)
Точность –
сантиметры
Псевдостатика
или реоккупация
Реального
времени
(Pseudostatic,
reoccupation)
Точность –
сантиметры
(Real Time KinematicRTK)
Точность –
сантиметры
54
55.
Дифференциальное позиционированиеДифференциальное позиционирование может осуществляться
по кодовым и фазовым измерениям (RTK) в режиме реального
времени
Трансляция поправок
Pi
Потребители
Вычисление скорректированных
псевдодальностей
Corr
Observ
dPRover
j Pj dPRover j
Контрольно-корректирующая
(ККС) или базовая станция (БС)
Вычисление поправок (коррекций)
к псевдодальностям
Theor
Observ
Pj dPKKS
dP
j
KKS j
DGPS системы по охвату территории делятся на:
- Локальные (создаются пользователем)
- Региональные (WAAS, EGNOS, MSAS, SNAS,
OMNISTAR, RACALL)
- Глобальные (GDGPS (JPL NASA) и StarFire
(NavCom))
56.
Способы инициализации кинематикиЦель инициализации – разрешение неоднозначности
фазовых измерений.
1). По известной точке (координаты которой в СК
WGS-84 определены с точностью не хуже 5см).
2). Статическая инициализация.
3). ON THE FLY – на лету (может быть использована
только с двухчастотными приемниками).
4). ANTENNA SWAPPING – способ перестановки
антенн.
56
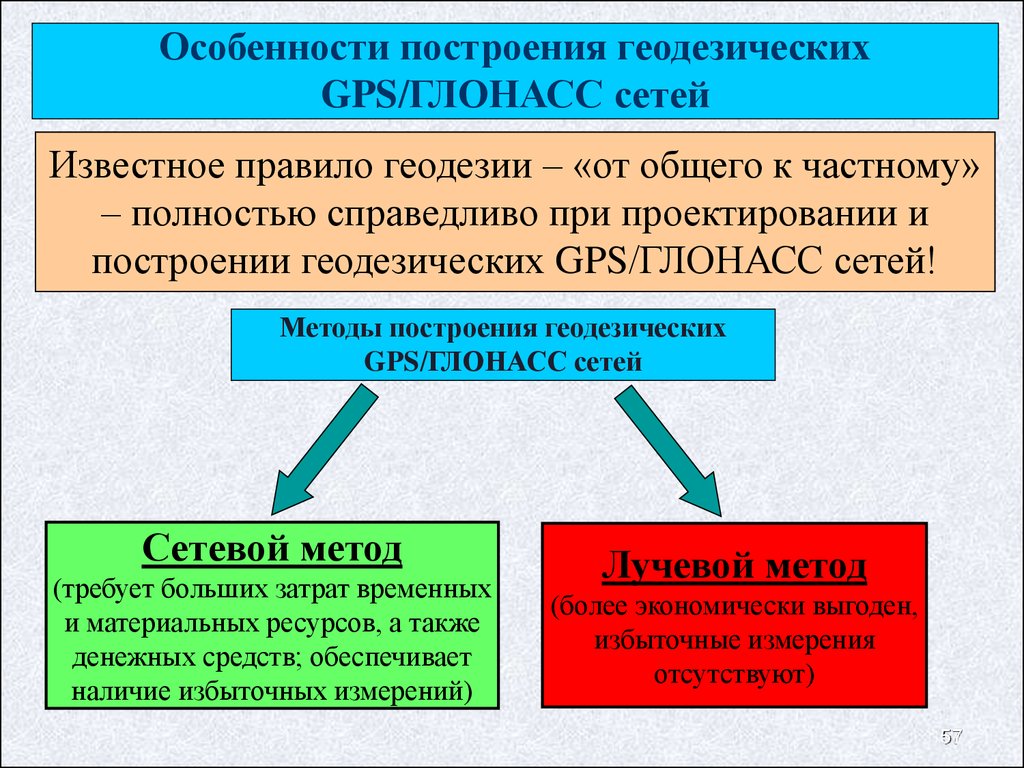
57.
Особенности построения геодезическихGPS/ГЛОНАСС сетей
Известное правило геодезии – «от общего к частному»
– полностью справедливо при проектировании и
построении геодезических GPS/ГЛОНАСС сетей!
Методы построения геодезических
GPS/ГЛОНАСС сетей
Сетевой метод
(требует больших затрат временных
и материальных ресурсов, а также
денежных средств; обеспечивает
наличие избыточных измерений)
Лучевой метод
(более экономически выгоден,
избыточные измерения
отсутствуют)
57
58.
Особенности построения геодезическихGPS/ГЛОНАСС сетей
Необходимо стремиться к выполнению независимых и
однородных измерений в спутниковой сети, а также включению
в ее состав достаточного количества избыточных измерений!
2
2
2
Примеры лучевого и сетевого методов
построения GPS/ГЛОНАСС сетей
1
1
3
3
независимый GPS вектор
58
59.
Общая концепция уравниванияGPS/ГЛОНАСС сетей
Пусть измерено n величин, истинные значения которых X1, X2, …, Xn, а измеренные значения
равны x1, x2, …, xn, причем количество измерений n избыточно по отношению к числу
определяемых параметров r.
Теоретически имеем
φ1(X1, X2, …, Xn) = 0,
…
(29)
φr(X1, X2, …, Xn) = 0.
Практически имеем
φ1(x1, x2, …, xn) = W1,
…
(30)
φr(x1, x2, …, xn) = Wr.
Для того, чтобы устранить невязки W1, W2, …, Wr необходимо исправить измерения
поправками v1, v2, …, vn. Тогда получим
φ1(x1 + v1, x2 + v2, …, xn + vn) = 0,
…
(31)
φr(x1 + v1, x2 + v2, …, xn + vn) = 0.
Решение системы уравнений (31) выполняется по МНК под условием [pv2] = min, полагая, что
ошибки измерений подчиняются нормальному закону распределения.
Среднеквадратические ошибки измерений, необходимые для вычисления априорных весов
измерений, используемых при уравнивании, получают из выражений
σi = a + bDi,
pi = (σ0 / σi)2.
59
60.
Условия, возникающие в GPS/ГЛОНАСС сетяхВ качестве измеренных величин при уравнивании
GPS/ГЛОНАСС сетей обычно используются компоненты
базовых линий Δxi, Δyi, Δzi.
В GPS/ГЛОНАСС сетях возникают следующие виды условий
n ( n 1)
2
n ( n 1)
2
i 1
i 1
xi 0,
n ( n 1)
2
yi 0,
i 1
xi ( xII xI ) 0,
Замкнутый
векторный ход
(полигон)
n ( n 1)
2
yi ( y II y I ) 0,
i 1
n ( n 1)
2
n ( n 1)
2
i 1
i 1
zi 0,
Векторный ход
между двумя
пунктами с
известными
координатами
zi ( z II z I ) 0,
60
61.
Цели уравнивания геодезическихGPS/ГЛОНАСС сетей
Задача уравнивания возникает только при наличии
в сети избыточно измеренных величин!!!
Цели уравнивания спутниковых измерений:
1. Поиск и исключение грубых ошибок в результатах
измерений;
2. Оценка и соответствующее распределение
случайных ошибок измерений.
3. Получение единственного набора значений
определяемых параметров;
4. Оценка точности полученных значений
определяемых параметров;
61
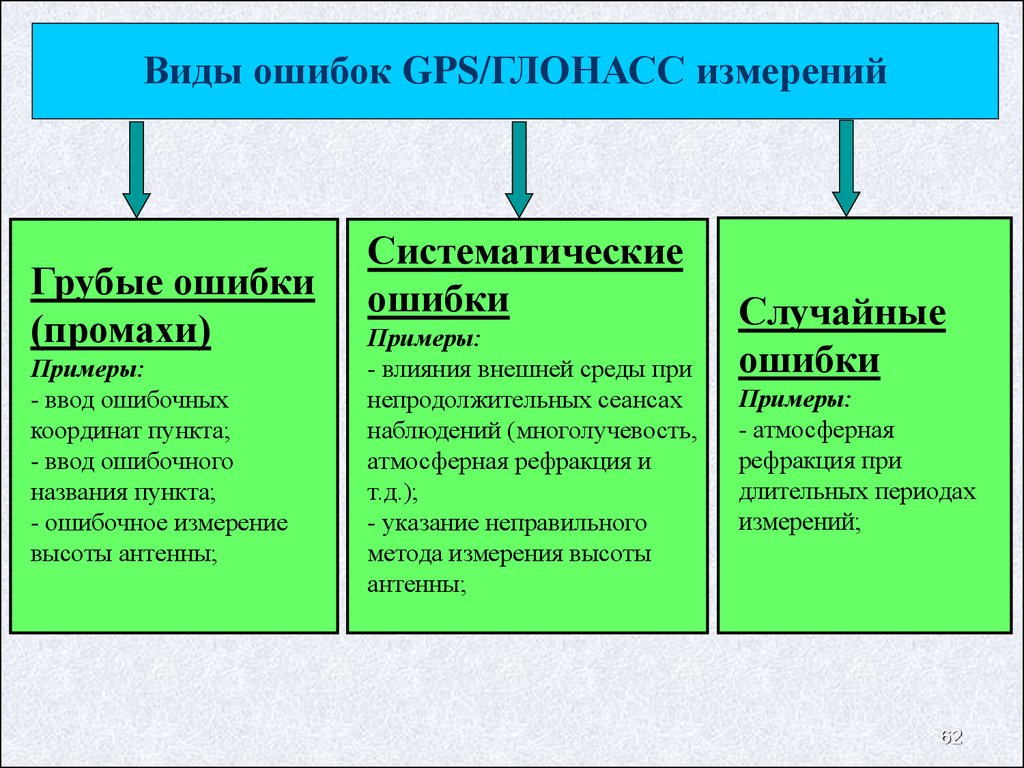
62.
Виды ошибок GPS/ГЛОНАСС измеренийГрубые ошибки
(промахи)
Примеры:
- ввод ошибочных
координат пункта;
- ввод ошибочного
названия пункта;
- ошибочное измерение
высоты антенны;
Систематические
ошибки
Примеры:
- влияния внешней среды при
непродолжительных сеансах
наблюдений (многолучевость,
атмосферная рефракция и
т.д.);
- указание неправильного
метода измерения высоты
антенны;
Случайные
ошибки
Примеры:
- атмосферная
рефракция при
длительных периодах
измерений;
62
63.
Абсолютная точность и внутренняя сходимостьрезультатов GPS/ГЛОНАСС измерений
Абсолютная точность (accuracy) характеризует степень близости результатов
измерений к их истинному значению.
Внутренняя сходимость (precision) характеризует степень близости
результатов измерений друг к другу или их среднему значению.
Плохая абсолютная
точность и
внутренняя
сходимость
результатов
Хорошая
внутренняя
сходимость, но
плохая абсолютная
точность
результатов
Хорошая
внутренняя
сходимость и
абсолютная
точность
результатов
63
64.
Оценка точности компонент базовой линии повнутренней сходимости результатов GPS измерений
64
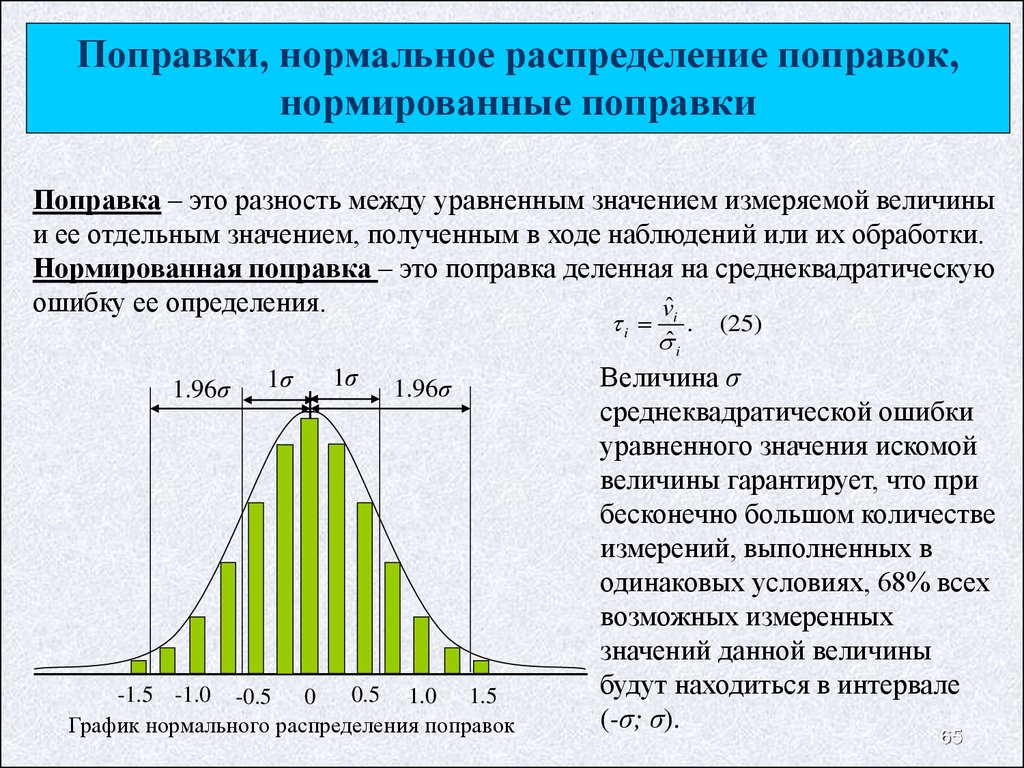
65.
Поправки, нормальное распределение поправок,нормированные поправки
Поправка – это разность между уравненным значением измеряемой величины
и ее отдельным значением, полученным в ходе наблюдений или их обработки.
Нормированная поправка – это поправка деленная на среднеквадратическую
ошибку ее определения.
vˆi
i
1.96σ
1σ
1σ
1.96σ
-1.5 -1.0 -0.5 0
0.5 1.0 1.5
График нормального распределения поправок
ˆ i
.
(25)
Величина σ
среднеквадратической ошибки
уравненного значения искомой
величины гарантирует, что при
бесконечно большом количестве
измерений, выполненных в
одинаковых условиях, 68% всех
возможных измеренных
значений данной величины
будут находиться в интервале
(-σ; σ).
65
66.
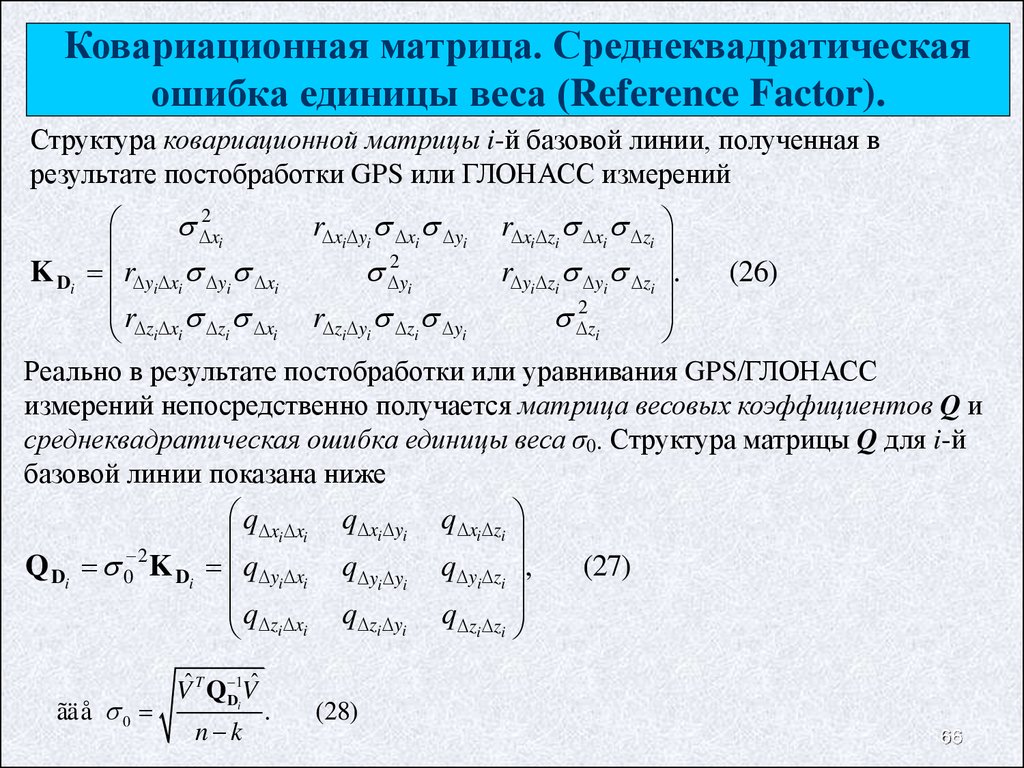
Ковариационная матрица. Среднеквадратическаяошибка единицы веса (Reference Factor).
Структура ковариационной матрицы i-й базовой линии, полученная в
результате постобработки GPS или ГЛОНАСС измерений
K Di
2xi
r yi xi yi xi
r zi xi zi xi
r xi yi xi yi
2yi
r zi yi zi yi
r xi zi xi zi
r yi zi yi zi .
2zi
(26)
Реально в результате постобработки или уравнивания GPS/ГЛОНАСС
измерений непосредственно получается матрица весовых коэффициентов Q и
среднеквадратическая ошибка единицы веса σ0. Структура матрицы Q для i-й
базовой линии показана ниже
Q Di 0 2 K Di
ãäå 0
q x x
i i
q yi xi
q zi xi
Vˆ T Q D1i Vˆ
n k
.
q xi yi
q yi yi
q zi yi
q xi zi
q yi zi ,
q zi zi
(27)
(28)
66
67.
Математический смысл среднеквадратическойошибки единицы веса (СКОЕВ)
Можно показать, что:
- если СКОЕВ=1, ошибки уравненных измерений
оценены совершенно точно, т.е. гарантируется
корректность соотношения между поправками и их
ошибками;
- если СКОЕВ<1, ошибки уравненных измерений
переоценены;
- если СКОЕВ>1, ошибки уравненных измерений
недооценены;
Важное замечание: если СКОЕВ>>1, в измерениях
присутствует грубая ошибка (ошибки).
67
68.
Результаты оценки точности компонент базовыхлиний (краткий отчет)
68
69.
Схема расположения пунктов ФАГС (1999-2003гг.)70.
Схема расположения пунктов ФАГС (1999-2003гг.)71.
Схема расположения пунктов ОГС72.
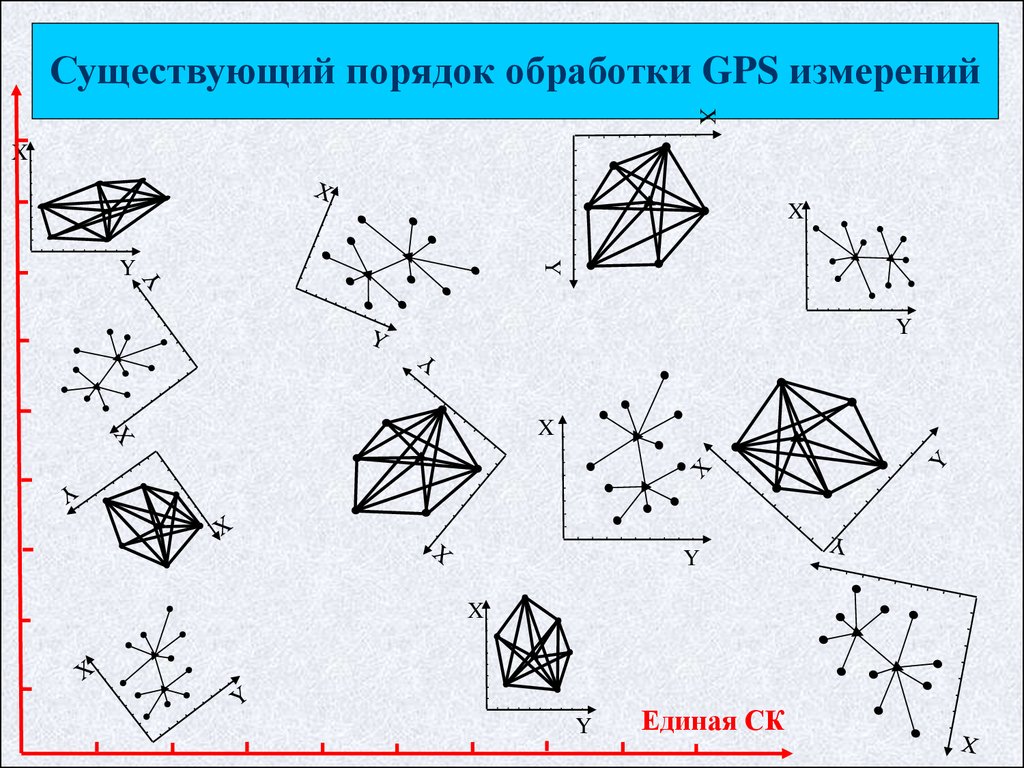
Существующий порядок обработки GPS измеренийX
X
X
Y
Y
Y
X
Y
X
Y
Единая СК
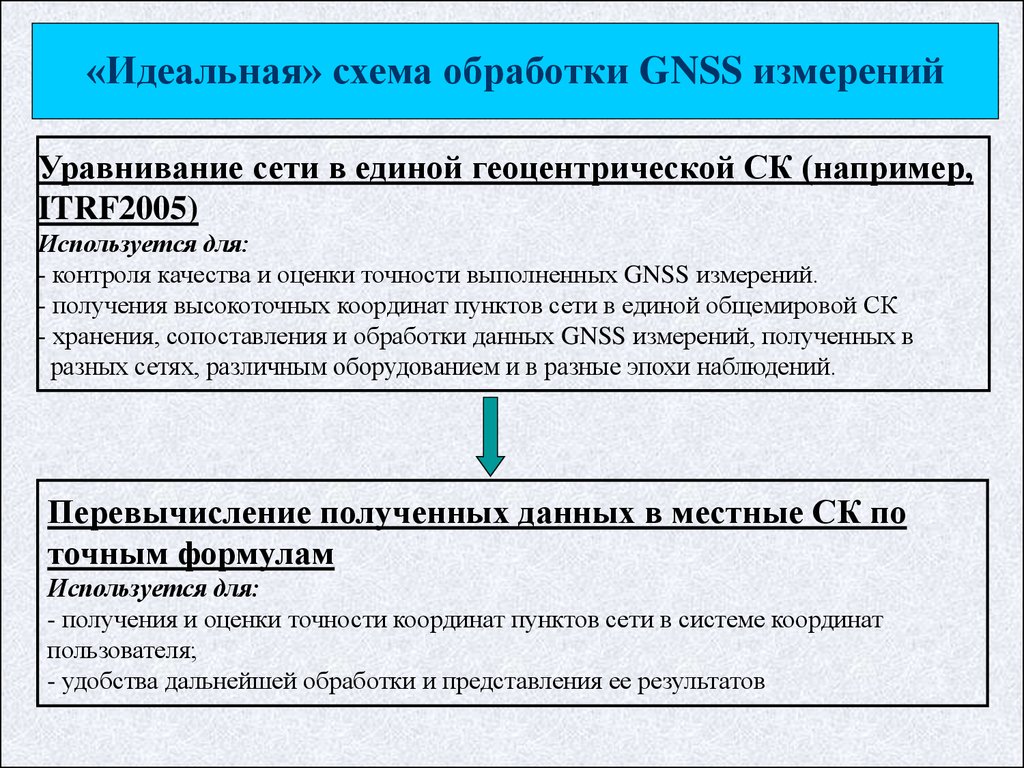
73.
«Идеальная» схема обработки GNSS измеренийУравнивание сети в единой геоцентрической СК (например,
ITRF2005)
Используется для:
- контроля качества и оценки точности выполненных GNSS измерений.
- получения высокоточных координат пунктов сети в единой общемировой СК
- хранения, сопоставления и обработки данных GNSS измерений, полученных в
разных сетях, различным оборудованием и в разные эпохи наблюдений.
Перевычисление полученных данных в местные СК по
точным формулам
Используется для:
- получения и оценки точности координат пунктов сети в системе координат
пользователя;
- удобства дальнейшей обработки и представления ее результатов
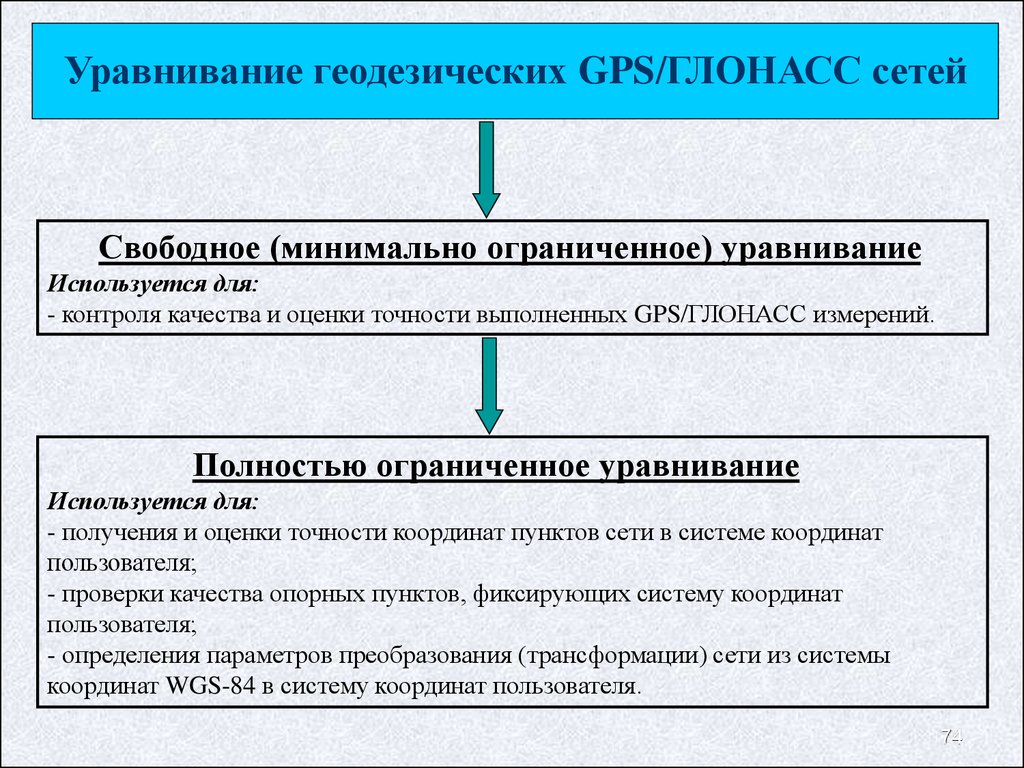
74.
Уравнивание геодезических GPS/ГЛОНАСС сетейСвободное (минимально ограниченное) уравнивание
Используется для:
- контроля качества и оценки точности выполненных GPS/ГЛОНАСС измерений.
Полностью ограниченное уравнивание
Используется для:
- получения и оценки точности координат пунктов сети в системе координат
пользователя;
- проверки качества опорных пунктов, фиксирующих систему координат
пользователя;
- определения параметров преобразования (трансформации) сети из системы
координат WGS-84 в систему координат пользователя.
74
75.
Трансформация результатов GPS/ГЛОНАССизмерений в заданную систему координат
Цель трансформации – преобразование результатов
GPS/ГЛОНАСС позиционирования в заданную
систему координат, определяемую пользователем.
Как правило, трансформация плановых координат и
высот пунктов GPS/ГЛОНАСС сети осуществляется
раздельно.
75
76.
Трансформация плановых координатX c1 x cos y sin ,
X
Y c2 y cos x sin .
x
y
x
α
y
xsinα
X
α
c
c1
ycosα
c2
Y
Y
76
77.
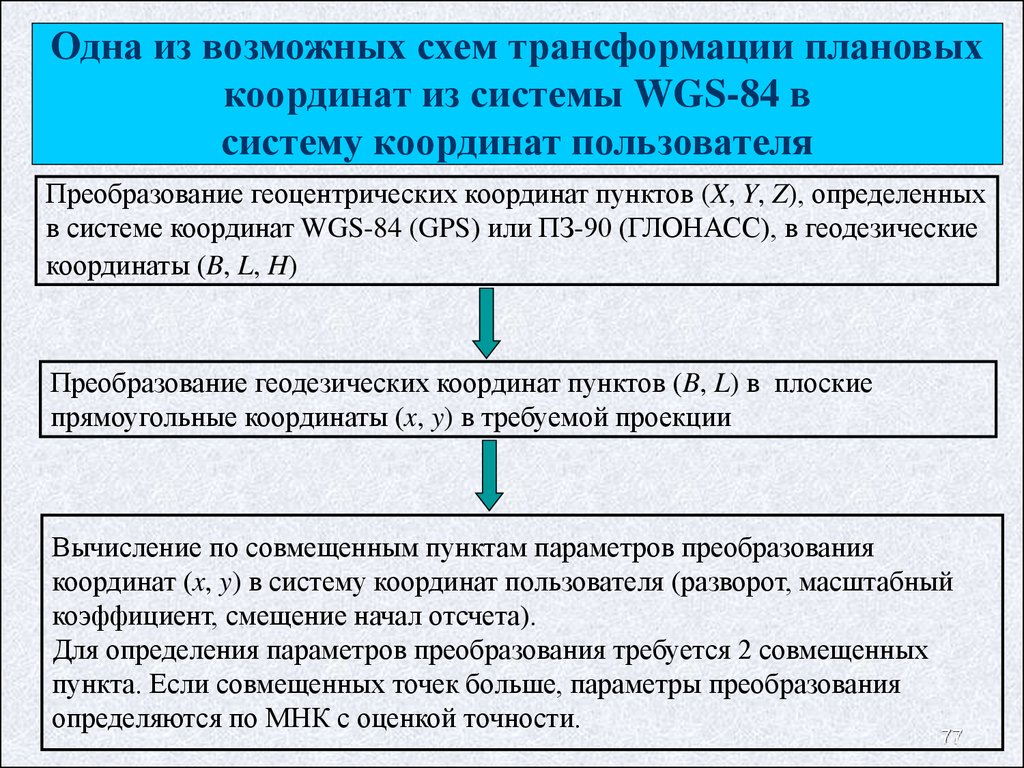
Одна из возможных схем трансформации плановыхкоординат из системы WGS-84 в
систему координат пользователя
Преобразование геоцентрических координат пунктов (X, Y, Z), определенных
в системе координат WGS-84 (GPS) или ПЗ-90 (ГЛОНАСС), в геодезические
координаты (B, L, H)
Преобразование геодезических координат пунктов (B, L) в плоские
прямоугольные координаты (x, y) в требуемой проекции
Вычисление по совмещенным пунктам параметров преобразования
координат (x, y) в систему координат пользователя (разворот, масштабный
коэффициент, смещение начал отсчета).
Для определения параметров преобразования требуется 2 совмещенных
пункта. Если совмещенных точек больше, параметры преобразования
определяются по МНК с оценкой точности.
77
78.
Трансформация высотZ
Zr
H
H
α3
Z
ζ
H = H γ+ ζ
X
H– H γ = ∆h – Yr dα1 + Xr dα2
X
α2
Yr
c
∆h
X
Xr
Y
α1
Xr
Y
78
79.
Одна из возможных схем трансформации высот изсистемы WGS-84 в систему координат пользователя
Преобразование геоцентрических координат пунктов (X, Y, Z), определенных
в системе координат WGS-84 (GPS) или ПЗ-90 (ГЛОНАСС), в геодезические
координаты (B, L, H)
Вычисление по совмещенным пунктам параметров преобразования (два угла
разворота, вертикальное смещение) геодезических высот H в нормальные
высоты H γ.
Для определения параметров преобразования требуется 3 совмещенных
пункта. Если совмещенных точек больше, параметры преобразования
определяются по МНК с оценкой точности.
79
80.
Упрощенная принципиальная схема устройства ифункционирования спутникового приемника
Антенный
блок
Радиочастотный блок
Блок
управления
___________________________
Запоминающее
устройство
Блок микропроцессоров
Блок
питания
80
81.
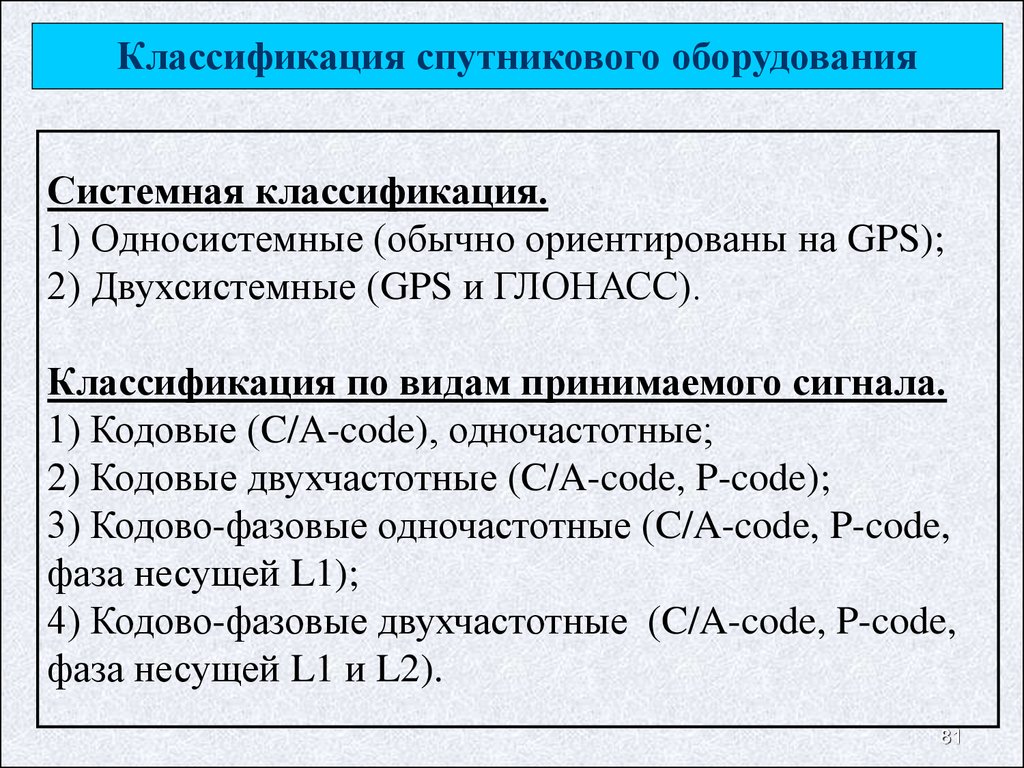
Классификация спутникового оборудованияСистемная классификация.
1) Односистемные (обычно ориентированы на GPS);
2) Двухсистемные (GPS и ГЛОНАСС).
Классификация по видам принимаемого сигнала.
1) Кодовые (C/A-code), одночастотные;
2) Кодовые двухчастотные (C/A-code, P-code);
3) Кодово-фазовые одночастотные (C/A-code, P-code,
фаза несущей L1);
4) Кодово-фазовые двухчастотные (C/A-code, P-code,
фаза несущей L1 и L2).
81
82.
ПРАКТИЧЕСКАЯ ЧАСТЬОбщие рекомендации по выполнению геодезических
GPS/ГЛОНАСС измерений
При практическом выполнении спутниковых наблюдений следует соблюдать следующие
общие рекомендации:
1) Выполнять измерения в местах с наилучшим обзором небосвода и минимальным количеством препятствий,
превышающих угол отсечки (маску), установленную в приемнике. Рекомендуемая величина маски 10º-15 º.
Необходимо учитывать, что наименьшее количество спутников наблюдается в северной части небосвода.
2) Не производить наблюдений вблизи мощных источников радио-излучения близкого к GPS/ГЛОНАСС
частотного диапазона.
3) Не производить наблюдений вблизи объектов, способных переотразить спутниковых сигнал (стены зданий,
металлические решетчатые фермы, мачты и т.п., обширные водные поверхности).
4. Выбирать для наблюдений периоды с наибольшим количеством наблюдаемых спутников, имеющих
максимальное возвышение над горизонтом.
5. Соответствующим образом увеличивать продолжительность сеанса наблюдений при уменьшении
количества наблюдаемых спутников и увеличении длины наблюдаемой базовой линии.
6. При высокоточных измерениях всегда использовать штатные экраны-отсекатели для снижения воздействия
многолучевости на результаты измерений (или антенны типа Choke-Ring), а также ориентировать антенну в
северном направлении при помощи маркеров, нанесенных на ее поверхность.
7. При высокоточных измерениях очень тщательно (лучше дважды) измерять высоту антенны на геод. центром
и корректно фиксировать метод измерения высоты (наклонная, вертикальная, до кромки экрана и т.д.).
8. При работе без контроллера тщательно записывать имя точки, моменты начала и конца наблюдений, высоту
антенны и способ ее измерения, тип используемого приемника и антенны.
82
83.
Параметры, которые необходимо контролироватьпри выполнении GPS/ГЛОНАСС измерений
1) Количество непрерывно отслеживаемых
спутников (желательно чтобы их было 5-6 и
больше);
2) PDOP (чем он меньше тем лучше).
Желательно, чтобы его величина PDOP
находилась в пределах 1-3.
3) Количество эпох наблюдений по каждому
отслеживаемому спутнику (позволяет выявить
срывы цикла).
4) Продолжительность сеанса наблюдений.
83
84.
www.trimble.com – официальный сайт компании Trimble;http://trl.trimble.com/dscgi/ds.py/Get/File-29893/SetupPlanning.exe – программа
для планирования GPS наблюдений;
ftp://ftp.trimble.com/pub/eph/current.ssf – альманах (постоянно обновляется);
https://www.schriever.af.mil/gps/Current/current.alm – альманах (постоянно
обновляется);
http://www.ngs.noaa.gov/ANTCAL/index.shtml – NGS калибровка
GPS/GLONASS антенн;
http://www.navcen.uscg.gov/Ftp/gps/status.txt
84