








 electronics
electronicsSimilar presentations:
")
")
")



")



Компьютерная модель радиоэлектронных средств (РЭС)
1.
Компьютерная модель РЭСКомпьютерная модель РЭС - это программный продукт, позволяющий провести
исследование РЭС проведением вычислительного эксперимента.
Компьютерная модель состоит из 1) прикладной программы РЭС,
составленной на основе математической модели, и 2) обслуживающих
программ, обеспечивающих выполнение прикладной программы и
представление результатов моделирования в удобной для пользователя
форме.
Компьютерные модели делят на два вида: аналитические и имитационные.
Аналитическая модель описывается математическим выражением,
позволяющим сразу найти искомые переменные. Имитационная модель
описывается совокупностью математических выражений, выполняющихся
последовательно в том же порядке, в каком происходит обработка процессов
в моделируемой системе.
Один из главных вопросов вычислительного эксперимента, проводимого на
имитационной модели, – насколько его результаты адекватны результатам
натурного эксперимента. Для компьютерной модели этот вопрос можно
сформулировать так: насколько точно модель описывает систему.
2.
Рассмотрим источники ошибок, возникающих при формировании компьютернойимитационной модели, использующей D-схему.
Концептуальная
модель
Источник
ошибок
1
Непрерывная
математическая
модель
Алгоритмическая
модель
Источник
ошибок
2
Компьютерная
модель
Источник
ошибок
3
Источник ошибок 1 – это неточная математическая модель компонентов схемы и
неконтролируемые факторы, являющиеся источниками помех.
Источник ошибок 2 связан с переходом от непрерывного времени к
дискретному, от дифференциальных уравнений к разностным. Появляются
ошибки дискретизации.
Источник ошибок 3 связан с переходом от дискретного сигнала к цифровому. Это
ошибки квантования по уровню и ошибки округления при вычислениях.
3.
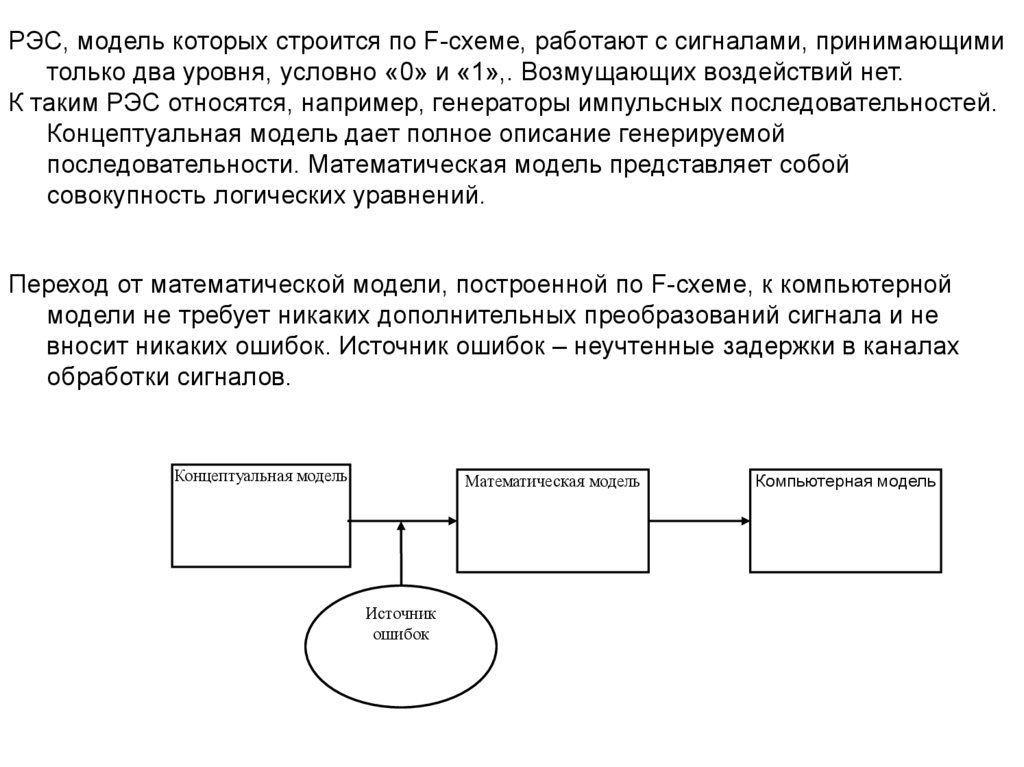
РЭС, модель которых строится по F-схеме, работают с сигналами, принимающимитолько два уровня, условно «0» и «1»,. Возмущающих воздействий нет.
К таким РЭС относятся, например, генераторы импульсных последовательностей.
Концептуальная модель дает полное описание генерируемой
последовательности. Математическая модель представляет собой
совокупность логических уравнений.
Переход от математической модели, построенной по F-схеме, к компьютерной
модели не требует никаких дополнительных преобразований сигнала и не
вносит никаких ошибок. Источник ошибок – неучтенные задержки в каналах
обработки сигналов.
Концептуальная модель
Математическая модель
Источник
ошибок
Компьютерная модель
4.
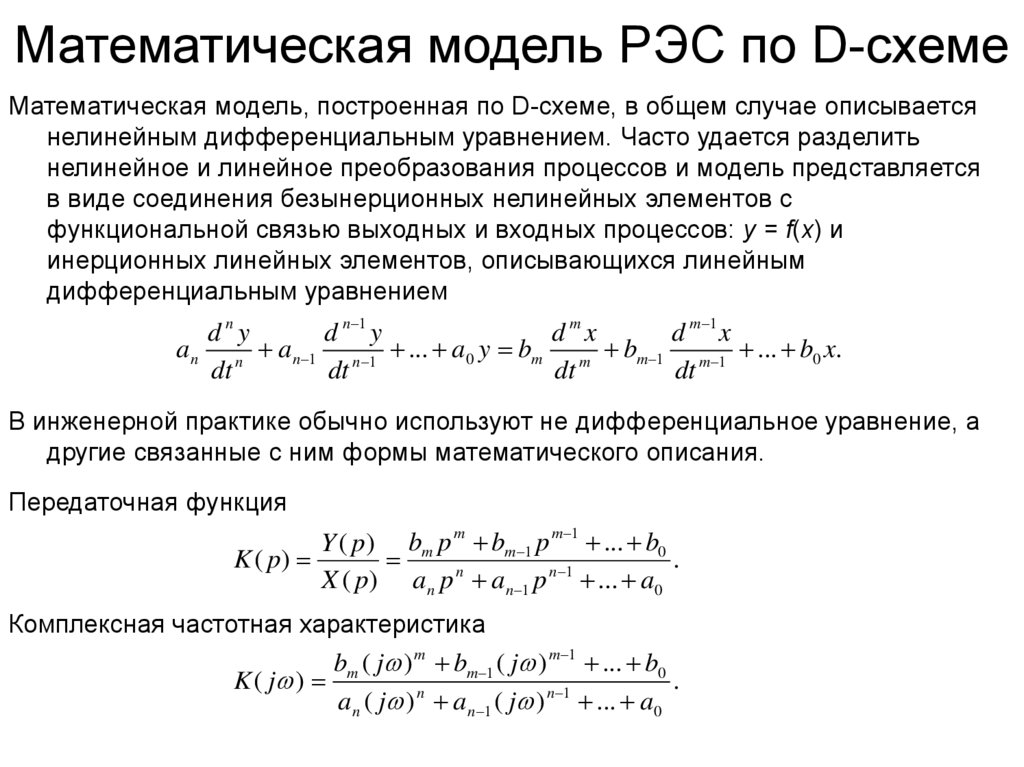
Математическая модель РЭС по D-схемеМатематическая модель, построенная по D-схеме, в общем случае описывается
нелинейным дифференциальным уравнением. Часто удается разделить
нелинейное и линейное преобразования процессов и модель представляется
в виде соединения безынерционных нелинейных элементов с
функциональной связью выходных и входных процессов: y = f(x) и
инерционных линейных элементов, описывающихся линейным
дифференциальным уравнением
dny
d n 1 y
d mx
d m 1 x
a n n a n 1 n 1 ... a0 y bm m bm 1 m 1 ... b0 x.
dt
dt
dt
dt
В инженерной практике обычно используют не дифференциальное уравнение, а
другие связанные с ним формы математического описания.
Передаточная функция
Y ( p) bm p m bm 1 p m 1 ... b0
K ( p)
.
n
n 1
X ( p) an p an 1 p ... a0
Комплексная частотная характеристика
bm ( j ) m bm 1 ( j ) m 1 ... b0
K ( j )
.
n
n 1
a n ( j ) a n 1 ( j ) ... a0
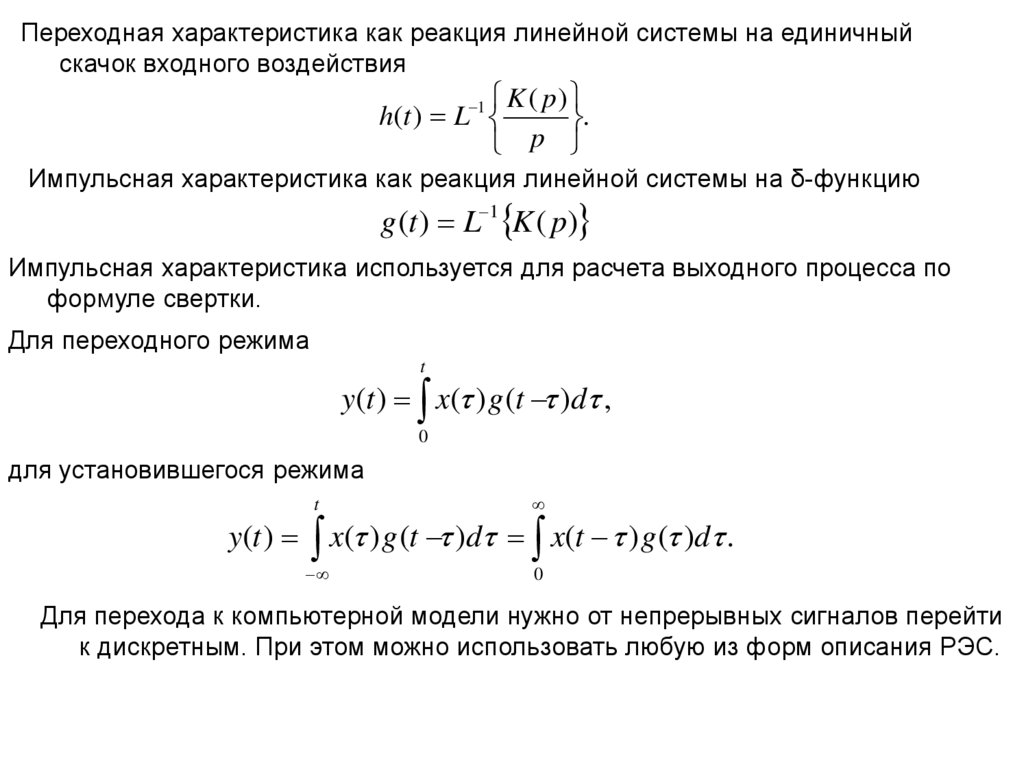
5.
Переходная характеристика как реакция линейной системы на единичныйскачок входного воздействия
K ( p)
h(t ) L
.
p
1
Импульсная характеристика как реакция линейной системы на δ-функцию
g (t ) L 1 K ( p)
Импульсная характеристика используется для расчета выходного процесса по
формуле свертки.
Для переходного режима
t
y(t ) x( ) g (t )d ,
0
для установившегося режима
y(t )
t
0
x( ) g (t )d x(t ) g ( )d .
Для перехода к компьютерной модели нужно от непрерывных сигналов перейти
к дискретным. При этом можно использовать любую из форм описания РЭС.
6.
1. Численное решение нелинейного дифференциального уравнения.Уравнение приводится к виду
dy (t )
F ( y (t ), x(t ), t ).
dt
Разложим решение уравнения y(t) в ряд Тейлора в окрестности точки при t = t0
dy (t )
1 d 2 y (t )
2
y (t ) y (t 0 )
(t t 0 )
(
t
t
)
...
0
2
dt t t0
2! dt
t t
0
и ограничимся двумя первыми членами разложения
dy (t )
y (t ) y (t 0 ) t
dt t t0
Перепишем это выражение в форме, удобной для пошагового вычисления,
обозначив t0 = tn, t = tn+1, y(t0) = yn, y(t) = yn+1, и учитывая, что dy (t )
F ( y n , xn , t n )
dt t tn
yn 1 yn t F ( yn , xn , t n ).
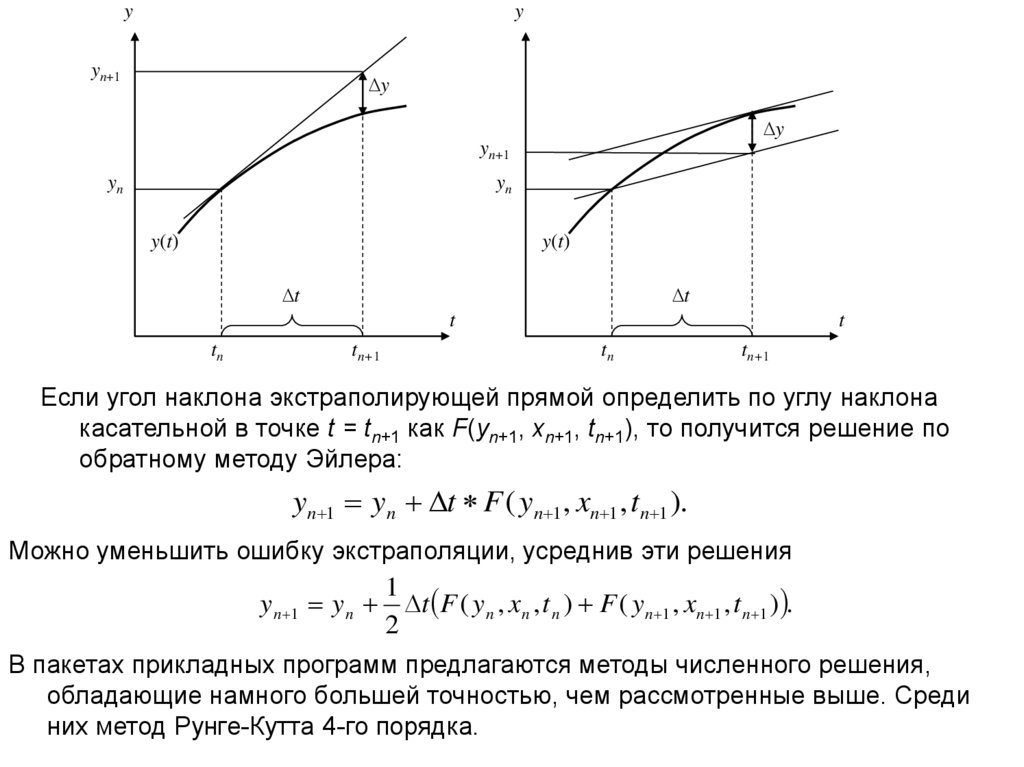
Это решение по прямому методу Эйлера. Оно получается на основе линейной
экстраполяции с углом наклона прямой F(yn, xn, tn)
7.
yy
yn+1
∆y
∆y
yn+1
yn
yn
y(t)
y(t)
∆t
∆t
t
tn
tn+1
t
tn
tn+1
Если угол наклона экстраполирующей прямой определить по углу наклона
касательной в точке t = tn+1 как F(yn+1, xn+1, tn+1), то получится решение по
обратному методу Эйлера:
yn 1 yn t F ( yn 1 , xn 1 , tn 1 ).
Можно уменьшить ошибку экстраполяции, усреднив эти решения
1
y n 1 y n t F ( y n , xn , t n ) F ( y n 1 , xn 1 , t n 1 ) .
2
В пакетах прикладных программ предлагаются методы численного решения,
обладающие намного большей точностью, чем рассмотренные выше. Среди
них метод Рунге-Кутта 4-го порядка.
8.
2. Использование формулы сверткиВозьмем время интегрирования t кратным интервалу дискретизации ∆t: t = n∆t.
Тогда
n 1 ( i 1) t
n t
x( ) g (n t )d x( ) g (n t )d
y(n t )
i 0
0
i t
Заменим входной процесс x(t) его ступенчатой аппроксимацией x(i∆t):
n 1 ( i 1) t
y(n t )
i 0
n 1
x(i t ) g (n t )d x(i t ) g
i 0
i t
инт
[(n i) t ],
( i 1) t
Здесь g инт[( n i) t ]
g (n t )d
– интегральная весовая функция.
i t
Она представляет собой
последовательность чисел, каждое
из которых равно площади под
импульсной характеристикой за
временной интервал ∆t,
предшествующий моменту отсчета
i∆t.
g
– gинт(i∆t)
g(t)
0
∆t
2∆t
3∆t
4∆t
5∆t
6∆t
t
9.
При малом ∆t можно использовать ступенчатую аппроксимацию импульснойхарактеристики и криволинейную трапецию заменить прямоугольником.
Тогда
( i 1) t
g (n t )d t * g[(n i) t ]
i t
и формула дискретной свертки
n 1
y (n t ) t x(i t ) g[( n i ) t ].
i 0
3. Замена непрерывной передаточной функции дискретной передаточной
функцией
Первый путь – использование дискретного преобразования Лапласа (Zпреобразования
Дискретизация
L
K(p)
g(t)
Z
g[n]
K(z)
Непрерывная передаточная функция K(p) связана с импульсной
характеристикой g(t) преобразованием Лапласа. Дискретизацией импульсной
характеристики получается весовая функция g[n]. Z-преобразование от
весовой функции даст дискретную передаточную характеристику K(z).
10.
Второй путь – замена непрерывного интегрирования дискретным. Для этого впередаточной функции
bm p m bm 1 p m 1 ... b0
K ( p)
a n p n a n 1 p n 1 ... a0
перейдем от оператора дифференцирования p к оператору интегрирования 1/p,
поделив числитель и знаменатель на pn.
1
bm
p
K ( p)
t
Значения интеграла y (t )
x(t )dt ,
t0
отстоящие друг от друга на интервал
времени ∆t, связаны соотношением
t
y(t ) y(t t )
x(t )dt.
n m
1
bm 1
p
n m 1
1
...
p
n
2
1
1
1
a n a n 1 a n 2 ... a 0
p
p
p
n
x
G
xn
C
D
x(t)
B
xn-1
F
t t
С учетом обозначений, принятых на
рисунке
y(n t ) y(( n 1) t ) S ABCDE ,
(n-2)∆t
A
(n-1)∆t
E
n∆t
t
11.
Простейшие методы численного интегрирования основаны на заменекриволинейной трапеции прямоугольником (ABFE – прямоугольник вперед,
AGDE – прямоугольник назад) или трапецией ABDE. Получатся следующие
приближенные формулы для вычисления интеграла. Для сокращения записи
принято y(i∆t) = yi.
Метод прямоугольников вперед yn
x
C
= yn-1 + SABFE = yn-1 +∆t xn-1.
G
D
xn
Возьмем Z-преобразование
Y(z) = z-1Y(z) + ∆tz-1X(z).
x(t)
B
xn-1
(n-2)∆t
A
(n-1)∆t
F
E
n∆t
Тогда
t
Метод прямоугольников назад
yn = yn-1 + SAGDE = yn-1 +∆t xn.
Метод трапеций
yn = yn-1 + SABDE = yn-1 +∆t (xn+ xn-1)/2
t z 1
K И ( z)
.
2 z 1
tz 1
t
K И ( z)
1 z 1 z 1
tz
K И ( z)
z 1
Оператор 1/p в непрерывной
передаточной функции можно
заменить любой из найденных
дискретных передаточных функций
12.
Как видим, дискретная модель непрерывной системы может быть полученаразличными путями. Целесообразно выбрать самый точный. Практика
моделирования показывает, что наименьшую ошибку обеспечивают методы
численного интегрирования дифференциальных уравнений.
№
п/п
Метод
1
Прямой Эйлера (1)
2
Обратный Эйлера (2)
3
Усредненный Эйлера (3)
4
Дискретная формула свертки (5)
5
Z-преобразование (6)
6
Прямоугольников «вперед» (12)
7
Прямоугольников «назад» (13)
8
Трапеций (14)
Разностное уравнение