

 industry
industrySimilar presentations:





")




Лекция 9 проектирование АТК. Регулируемые по скорости электроприводы. Каскадные электроприводы. Асинхронно-вентильные каскады
1.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
2. Регулируемые по скорости
электроприводы:
2.2. Каскадные электроприводы
Асинхронно-вентильные каскады.
.
2.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Принцип действия каскадных электроприводов основан на регулировании
скорости за счет различных способов преобразования энергии скольжения,
выделяемой в роторе асинхронного электродвигателя с фазным ротором.
В зависимости от способа преобразования энергии скольжения, привода
разделяются на электрические и электромеханические.
В электромеханических каскадах энергия скольжения выпрямляется,
преобразуется в механическую и возвращается на вал двигателя (ВЭМК)
или вновь преобразуется в электрическую и возвращается в сеть (МВК).
В электрических каскадах энергия скольжения за вычетом потерь
возвращается в питающую сеть (АВК)
3.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Асинхронно-вентильный каскад (АВК )
Асинхронный двигатель «М1» подключен со стороны статора к сети
переменного тока, его роторная цепь через выпрямитель «В», инвертор «И» и
согласующий трансформатор «Т» присоединяется к той же питающей сети.
Для сглаживания выпрямленного тока и нормальной работы инвертора
включен реактор «L». Принцип действия каскада состоит в том, что в цепь
выпрямленного тока ротора вводится добавочная ЭДС, получаемая
регулированием угла β опережения включения тиристоров инвертора.
4.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Ток в роторной цепи
Id=(EdoS- Edoи *cosβ-ΣΔU)/Rэ ,
где Edo= 1,35Е2к;
Edoи - ЭДС холостого хода инвертора при β=0,
Edoи =2,34Е2ф,т;
Е2ф,т — ЭДС фазы трансформатора;
ΣΔU — суммарное падение напряжения в вентилях роторной и инверторной
групп преобразователя;
Rэ — эквивалентное сопротивление, приведенное к роторной цепи,
содержащее индуктивное и активное сопротивления ротора, фазы
трансформатора, активное сопротивление реактора
5.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Ток ротора в относительных единицах равен:
Id =Edo(s-ε cosβ+λ)/Rэ ,
где
ε=Edoи /Edo; λ=ΣΔU/Edo .
В режиме идеального холостого хода при Id = 0, ΔU =0:
So=Edoи*cosβ/Edo
Мощность скольжения, проходящая через роторную цепь, воспринимается,
за исключением потерь, инвертором и равна:
Mwо*S = EdosId-m*xd*S*Id*2/2π
(здесь m — число фаз выпрямителя (для мостовой схемы m=6);
xd — приведенное к цепи ротора индуктивное сопротивление фазы
асинхронного двигателя.
6.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
При значениях S, близких к Sо, получаем:
М= Edo2(S-Sо) /ωо*Rэ
Формула не учитывает высших гармоник тока, искажений механических
характеристик в области прерывистых токов, а также режимов работы
выпрямителя, в которых внешняя характеристика выпрямителя резко
падает.
7.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
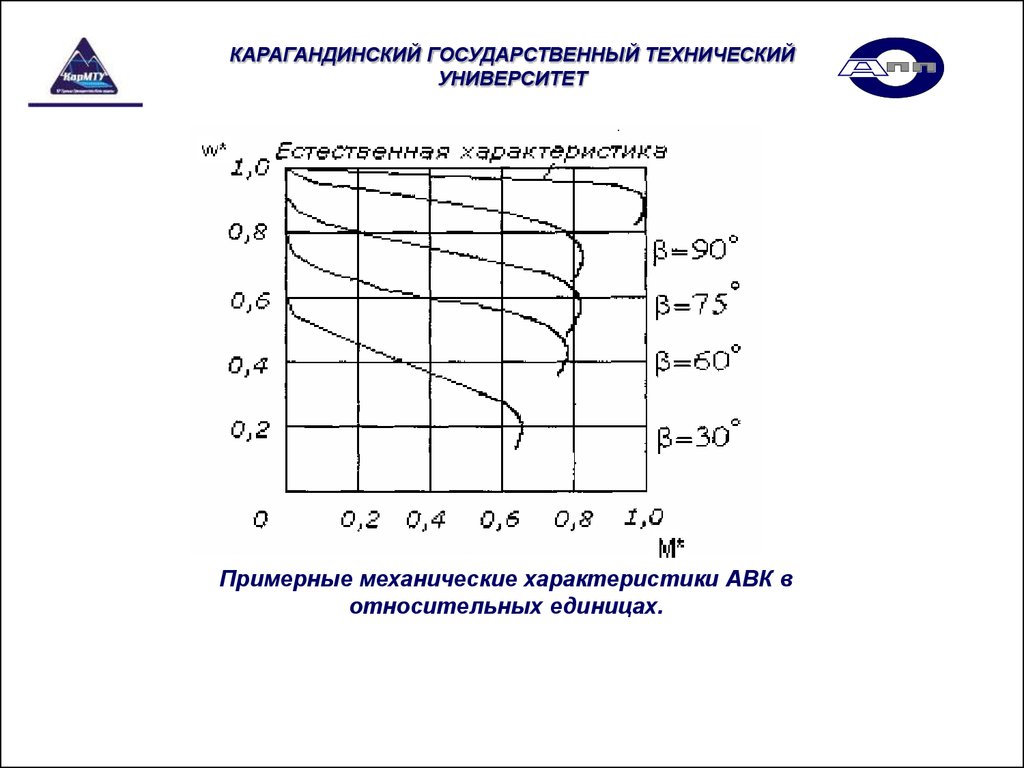
Примерные механические характеристики АВК в
относительных единицах.
8.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
При некотором угле β перегрузочная способность АВК падает.
Регулировочные свойства АВК при уменьшении угловой скорости ограничены
минимальным углом β, допустимым по условиям устойчивой работы
инвертора, и током инвертирования.
Максимальная угловая скорость АВК при номинальном моменте составляет
примерно 0,9ω0; минимальная угловая скорость практически принимается
равной 0,5ω0.
Максимальный момент в системе АВК составляет за счет дополнительных
потерь в тиристорах выпрямителя и инвертора 0.9 относительно
максимального момента на естественной характеристике.
Дальнейшее снижение угловой скорости приводит к увеличению
установленной мощности всех силовых элементов, включенных в роторную
цепь. При выборе электрооборудования для АВК необходимо учитывать, что
оно должно выбираться на максимальное напряжение статора и
максимальный ток ротора.
Регулирование угловой скорости в АВК однозонное (вниз от основной),
плавное бесступенчатое, экономичное.
9.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
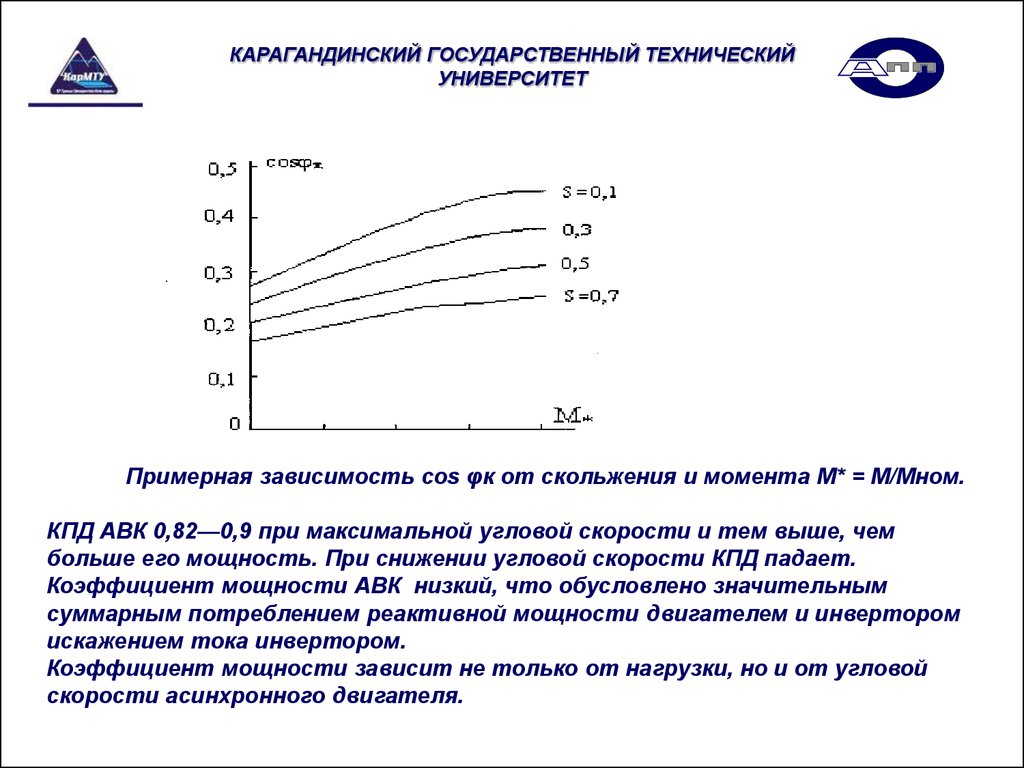
Примерная зависимость cos φк от скольжения и момента М* = М/Мном.
КПД АВК 0,82—0,9 при максимальной угловой скорости и тем выше, чем
больше его мощность. При снижении угловой скорости КПД падает.
Коэффициент мощности АВК низкий, что обусловлено значительным
суммарным потреблением реактивной мощности двигателем и инвертором
искажением тока инвертором.
Коэффициент мощности зависит не только от нагрузки, но и от угловой
скорости асинхронного двигателя.
10.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Основные особенности АВК
1. В процессе работы АВК происходит возвращение энергии скольжения
ротора асинхронного электродвигателя в питающую сеть, поэтому
электропривод имеет высокий КПД.
2. Жесткость механических характеристик падает по сравнению с
естественными» из-за увеличения сопротивления цепи ротора .
3. Максимальный момент также уменьшается по той же причине.
4. Диапазон регулирования скорости 1:2.
5. Применение АВК экономически целесообразно для достаточно мощных
электроприводов, для которых требуются плавный пуск и регулирование
скорости, но требования к динамическим показателям системы
регулирования (точность отработки, быстродействие) относительно
невысоки,
11.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Привод конвейера по системе АВК
Схема АВК применена в многодвигательном электроприводе
крутонаклонного конвейера КНК-30, изготовленного ОАО «АЗОВМАШ», г.
Мариуполь, для карьера «Мурунтау», Узбекистан .
Разработка системы управления электроприводами конвейера выполнена
АОЗТ « Тяжпромавтоматика», г. Харьков.
Крутонаклонный конвейер (КНК) предназначен для перегрузки горнорудной
массы из карьера в транспортную систему , состоящую из нескольких
транспортеров. Перепад высот для перегружателя – 30 м, угол наклона
конвейера – 37.
Особенностью конструкции КНК является наличие грузонесущей и
прижимной лент. Прижимная лента роликами прижимается к нагруженной
грузонесущей для удержания рудной массы в процессе транспортировки и
при остановках нагруженного конвейера. Длина ветви грузонесущей ленты –
88м, прижимной ленты - 74м. Усилие натяжения, создаваемое грузовыми
натяжными устройствами в ветви грузонесущей ленты, – до 30кН, в ветви
прижимной ленты – до 25кН.
12.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Для привода грузонесущей и прижимной лент использованы асинхронные
электродвигатели с фазным ротором во взрывозащищенном исполнении
типа ВАОК-355М8У1, 160кВт, 750 об/мин, 380В, 50Гц в количестве 4.
Электродвигатели устанавливаются на приводах опорной S-образной
станции грузонесущей ленты: на нижнем барабане – два электродвигателя,
на верхнем барабане – один и на приводном барабане прижимной ленты –
один электродвигатель.
Для питания и управления статорными и роторными цепями приводных
асинхронных электродвигателей КНК, выполненных по схеме АВК,
применены комплектные устройства типа ККПУФ-400/380-30Р32У3, 400А,
380В, разработанные и изготовленные ООО « Электроимпульсные системы
» , г. Чебоксары, Россия.
13.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Управляющий микроконтроллер, входящий в состав ККПУФ-Р, обеспечивает
импульсно-фазовое управление тиристорами инвертора АВК, управляет
режимами переключения силовой коммутационной аппаратуры, формирует
сигнал задания напряжения на входе аналогового регулятора напряжения
ротора.
Система автоматического регулирования параметров АВК – аналоговая,
построенная по принципу подчиненного регулирования, двухконтурная: с
внешним контуром регулирования напряжения ротора и внутренним
контуром регулирования тока.
Система управления взаимосвязанными электроприводами КНК,
выполненная на базе устройств ККПУФ-Р, управляется программируемым
контроллером (ПК) типа SIMATIC S7-300 фирмы SIEMENS.
В качестве датчиков скорости приводных и холостых барабанов КНК
используются импульсные индуктивные датчики, на которые воздействуют
две стальные пластины, установленные на каждом барабане .
14.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Система управления электроприводами обеспечивает:
- выравнивание скоростей грузонесущей и прижимной лент;
- выравнивание нагрузок между приводами грузонесущей ленты;
-поддержание заданного распределения нагрузок между приводами нижнего и
верхнего барабанов тянущей станции;
- плавный пуск КНК с заданным ускорением и ограничением тока
электродвигателей.
15.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Разгон и торможение всех электроприводов КНК с заданным ускорением
осуществляется общим задатчиком интенсивности, выдающим задания
скорости на входы АВК всех электроприводов КНК.
При возникновении разности скоростей холостых барабанов грузонесущей и
прижимной лент формируется сигнал коррекции
соответствующего знака, который суммируется с сигналом задания
скорости от общего задатчика интенсивности и выдается на вход АВК
прижимной ленты.
Нагрузки между электродвигателями нижнего барабана S-образной тянущей
станции грузонесущей ленты и электродвигателем верхнего барабана
делятся в соотношении 2:1.
16.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Скорость движения ленты определяется скоростью электродвигателей
нижнего барабана, которые работают в соответствии с заданием.
Выравнивание нагрузок между электродвигателями нижнего барабана
обеспечивается предварительной настройкой жесткости механических
характеристик АВК каждого двигателя.
В ПК производится сравнение тока статора электродвигателя верхнего
барабана с полусуммой токов электродвигателей нижнего барабана.
При возникновении разницы токов более 5-10% формируется сигнал
коррекции скорости электродвигателя верхнего барабана с
соответствующим знаком (плюс при уменьшении нагрузки
электродвигателя верхнего барабана).
Сигнал коррекции скорости суммируется с сигналом задания скорости от
общего задатчика интенсивности и поступает на вход АВК
электродвигателя верхнего барабана. Скорость верхнего барабана
устанавливается при отработке заданной нагрузки барабана, обеспечивая
распределение нагрузок между барабанами. Максимальная величина сигнала
коррекции скорости верхнего барабана ограничена на уровне ±5% от рабочей
скорости ленты перегружателя.
17.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Контроль проскальзывания лент на барабанах производится путем
сравнения скоростей приводных и холостых барабанов посредством
использования сигналов индуктивных датчиков.
В системе управления электроприводами КНК в состав объекта
регулирования входит упругое звено – конвейерная лента, имеющая
достаточно большую длину.
С целью исключения колебательности (рывков ленты) регулятор
выравнивания скоростей лент и регулятор деления нагрузок
выполнены интегральными с достаточно большими величинами
постоянных времени интегрирования.
18.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
2.2. Каскадные электроприводы
Машины двойного питания (МДП)
В машине двойного питания ( управляемой машине переменного тока)
обмотка статора получает питание от сети с частотой питающего
напряжения f1, а к обмотке ротора через управляемый вентильный
преобразователь ПЧ подводится напряжение с частотой f2 (f2 < f1) .
19.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Частота и амплитуда напряжения ПЧ регулируются по заданному закону
системой управления. Машины двойного питания целесообразно применять
в установках большой мощности, где их преимущества наиболее сильно
проявляются. Они могут работать в качестве генераторов и двигателей
как в синхронном, так и в асинхронном режиме.
В машине двойного питания, работающей двигателем, изменением f2 можно
регулировать частоту вращения. Частота тока в роторе асинхронной
машины
f2 = f1s,
где
s = (n1 - n) / n1
n1 - частота вращения магнитного поля.
20.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Зависимость частоты вращения ротора n от f1 и f2:
n = n1(f1 ± f2) / f1
знак плюс соответствует чередованию фаз ПЧ, при котором ротор и его
магнитное поле вращаются в противоположных направлениях, а минус – при
вращении ся в одну и ту же сторону.
В зависимости от направления вращения магнитного поля ротора можно
получить
n < n1, или n > n1,
Если при работе поддерживать
f2 = const,
то машина будет работать в синхронном режиме, при
f2 = var - в асинхронном.
Когда
f2 = 0
(питание обмотки ротора постоянным током), машина работает как
обычный синхронный двигатель.
21.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
С целью снижения активной мощности преобразователя частоты
Рпч = (f2 /f1) Рэм
где Рэм - электромагнитная мощность), частоту f2 изменяют в небольших
пределах.
Кроме частоты вращения в машине двойного питания, работающей
двигателем, можно регулировать реактивную мощность и cos φ.
Машина может работать как с опережающим, так и с отстающим током.
Если подводимая к обмотке ротора добавочная ЭДС Ед совпадает по
направлению с индуктированной в ней ЭДС Е2 , то в этом случае
происходит регулирование частоты вращения ротора.
При изменении фазы Ед относительно Е2 одновременно с регулированием
частоты вращения изменяется и реактивная мощность, т. е. cos φ.
22.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Регулирование скорости ленты конвейера в зависимости от находящегося
на ней веса груза позволяет:
•значительно экономить энергию;
•понизить износ механической части конвейера;
•увеличить срок работы механического оборудования;
•снизить эксплуатационные и инвестиционные расходы.
Уменьшение скорости ленты конвейера с неполной загрузкой обеспечивает
значительное уменьшение:
•количества оборотов ленты;
•износа опор движения конвейера;
•необходимости раздробления породы в местах пересыпки;
•износа механических частей конвейера — барабанов и ленты.
23.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
На предприятии KWK ANNA в Польше в течение трех лет эксплуатации
конвейера с регулируемой скоростью и стабилизацией единичной загрузки
ленты получены следующие результаты:
•Не произошло ни одного разрыва ленты.
•Количество оборотов ленты уменьшилось в два раза из-за снижения
скорости конвейера, что увеличило ресурс ленты практически в два раза.
•Срок использования ленты конвейера за счет регулирования скорости
возрос на 50% относительно гарантийного срока безаварийной работы.
•Регулирование скорости конвейера позволило экономить электроэнергию,
потребляемую электродвигателями по сравнению с нерегулируемым
конвейером в расчете на одну тонну перевезенной породы 39%.
24.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
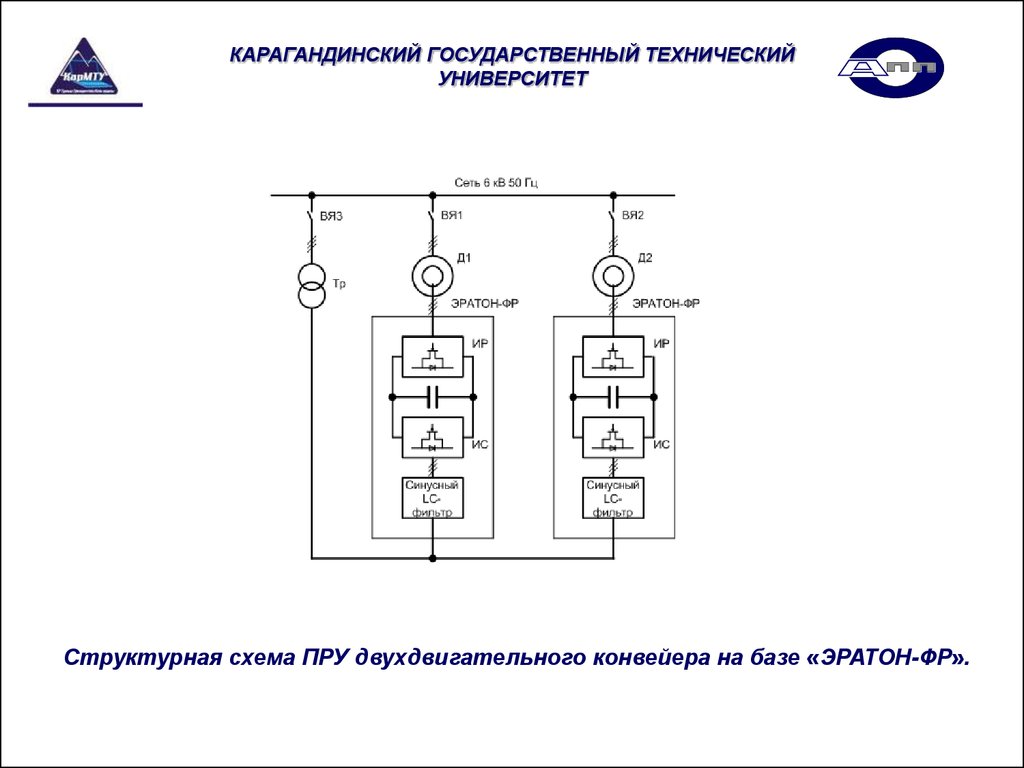
Структурная схема ПРУ двухдвигательного конвейера на базе «ЭРАТОН-ФР».
25.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Преобразователь частоты типа «ЭРАТОН-ФР» устанавливается между
цепью ротора и высоковольтной сетью, питающей статоры.
Пускорегулирующее устройство (ПРУ) каждого АД ФР это последовательное соединение двух транзисторных инверторов
напряжения (роторного — ИР и сетевого — ИС) с накопительным
конденсатором в промежуточном звене постоянного тока.
ИР и ИС управляются по закону синусоидальной широтно-импульсной
модуляции и обеспечивают плавный пуск и регулирование скорости
электродвигателей за счет обмена энергией между роторами
электродвигателей и высоковольтной питающей сетью.
Для электромагнитной совместимости сетевого инвертора с питающей
сетью в преобразователе использован «синусный» LC-фильтр, который
не пропускает высокочастотные составляющие напряжения сетевого
инвертора в питающую сеть.
26.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
ИР обеспечивает плавное нарастание момента электродвигателя до пуска и
плавное бесступенчатое увеличение скорости электродвигателя в процессе
разгона за счет векторного управления моментом электродвигателя с
сохранением постоянного заданного динамического момента (постоянного
ускорения) в процессе всего пуска. Темп разгона программируется.
В процессе разгона конвейера ИР обеспечивают выравнивание моментов
(токов роторов) электродвигателей.
После окончания разгона конвейера ИР обеспечивают стабилизацию
скорости конвейера и выравнивание нагрузки электродвигателей.
Стабилизация номинальной скорости конвейера с ЧРЭП «ЭРАТОН-ФР»
обеспечивается с точностью 1%, а выравнивание токов роторов с
точностью 5%.
27.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
ИС возвращает мощность скольжения двигателя в питающую сеть 6 кВ 50 Гц
через согласующий трансформатор ,что обеспечивает экономию
электроэнергии при пусках и позволяет регулировать скорость конвейера в
широких пределах без потерь мощности.
При пуске конвейера по мере разгона электродвигателей мощность
скольжения роторов уменьшается, и нагрузка ИС снижается.
ИС переводятся в режим генерации в сеть реактивной мощности, т.е. в
режим компенсатора реактивной мощности.
Компенсация реактивной мощности разгружает сеть от реактивных токов
и не требует затрат на установку дополнительных компенсаторов.
Преобразователи частоты «ЭРАТОН-ФР» обеспечивают режим
рекуперативного торможения АД с рекуперацией энергии движущихся масс
конвейера в питающую сеть, что также повышает энергоэффективность
конвейера.
28.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
ПРУ обеспечивает:
•Работу конвейера на пониженной скорости 0,2–0,3 номинальной для ремонта,
навески и замены ленты конвейера без ограничения продолжительности
данного режима. При этом мощность скольжения возвращается в питающую
сеть практически без потерь.
•Неограниченное число пусков конвейера, поскольку не содержит нагревающихся
элементов.
•Регулирование скорости конвейера в широких пределах без потерь мощности в
цепях ротора электродвигателей, что обеспечивает энергоэффективность
конвейера и существенное сокращение эксплуатационных затрат.
•Разгон электродвигателей конвейера до скорости выше синхронной, если
номинальный момент электродвигателей превышает момент сопротивления
на сверхсинхронной скорости. Это позволяет повысить скорость движения
ленты недогруженного конвейера.
29.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Спасибо за внимание!
Зав кафедрой автоматизации
производственных процессов
д.т.н., проф. Брейдо Иосиф Вульфович
Тел. +77212(565184)
+77771343827
E-mail: jbreido@kstu.kz
jbreido@mail.ru