




")












 industry
industrySimilar presentations:


")







Трамвай с асинхронным тяговым приводом и его характеристики
1. «Трамвай с асинхронным тяговым приводом и его характеристики»
Новосибирский государственный технический университетКафедра электротехнических комплексов
www.nstu.ru
«Трамвай с асинхронным тяговым
приводом и его характеристики»
Выполнили: студенты гр. ЭММ-13
Баранова Е.М., Заяц К.Ю.
Руководитель: д.т.н. профессор Щуров Н. И.
1/18
2. Структура и основные элементы тягового электропривода
Рисунок 1 – Структурная схема тягового электрического приводаИЭ - источник энергии;
Пр - преобразователь;
ЭМПр – электромеханический преобразователь (тяговый электродвигатель);
МП – механическая передача;
Дв – движитель (пневматическое колесо, колесная пара и т.д.);
СУ – система управления.
Новосибирский государственный технический университет
2/18
www.nstu.ru
3. Недостатки электропривода постоянного тока:
наличие коллекторно-щеточного узла снижает надежностьТЭД, увеличивает расходы на техническое обслуживание;
отсутствие возможности возвращения части энергии при
торможении в контактную сеть (рекуперативное торможение);
использование РКСУ для регулирования скорости приводило к
увеличению потерь на регулирование;
необходимость
использования
большого
количества
контактных элементов, осуществляющих коммутацию под
током (до 200 А) и требующих периодического обслуживания;
частота вращения ограничена
обмотки якоря и коллектора;
механической
прочностью
инертная система токовой защиты.
3/18
Новосибирский государственный технический университет
www.nstu.ru
4. В 1996 г. был впервые испытан и передан в эксплуатацию на трамвайном вагоне ЛВС-86А тяговый электропривод переменного тока.
Рисунок 2 – Первый в России трамвай с двигателями переменного тока4/18
Новосибирский государственный технический университет
www.nstu.ru
5. Преимущества и недостатки бесколлекторных двигателей
+ отсутствие коллекторно-щеточного узла;+ большая мощность АТД по отношению к ДПТ при
равных габаритах;
+ допускают большую частоту вращения;
+ меньшая масса и стоимость;
- квадратичная зависимость вращающего момента от
приложенного напряжения;
- громоздкость, сложность и ненадежность ранее
существующих преобразователей;
- значительное расхождение нагрузок между параллельно
работающими ТЭД.
5/18
Новосибирский государственный технический университет
www.nstu.ru
6. Преобразователь постоянно-переменного тока (инвертор)
К1К3
К1
К5
а
в
с
К2
К4
t
К2
К3
t
К4
К4
К6
К5
t
К6
T⁄6 T⁄3 T⁄2 2T⁄3 5T⁄6 T
Рисунок 3 – Принципиальная схема цепи преобразователя и
временная диаграмма
6/18
Новосибирский государственный технический университет
www.nstu.ru
7. Характеристики современных мощных силовых ключей
Типприбора
Преимущества
Недостатки
Самые низкие потери во включенном
Традицион
состоянии. Самая высокая перегрузочная Не способен к принудительному
ный
способность. Высокая надежность. Легко запиранию по управляющему
тиристор
соединяются
параллельно
и электроду. Низкая рабочая частота.
(SCR)
последовательно.
Области применения
Привод постоянного тока; мощные источники
питания;
сварка;
плавление
и
нагрев;
статические компенсаторы; ключи переменного
тока
Высокие потери во включен-ном
состоянии. Очень большие потери в
Электропривод; статические компенсаторы;
системе
управления.
Сложные
реактивные мощности; системы бесперебойного
системы управления и подачи
питания; индукционный нагрев
энергии на потенциал. Большие
потери на переключение.
GTO
Способность к управляемому запиранию.
Сравнительно
высокая
перегрузочная
способность.
Возможность
последовательного соединения. Рабочие
частоты до 250 Гц при напряжении до 4 кВ
IGCT
Способность к управляемому запиранию.
Перегрузочная способность та же, что и у
GTO. Низкие потери во включенном
Не выявлены из-за отсутствия опыта
состоянии на переключение. Рабочая
эксплуатации
частота - до единиц кГц. Встроенный блок
управления
(драйвер).
Возможность
последовательного соединения.
Мощные источники питания (инверторная и
выпрямительная подстанции линий передач
постоянного тока); электро-привод (инверторы
напряжения для преобразователей частоты и
электроприводов раз-личного назначения)
IGBT
Способность к управляемому запиранию.
Самая высокая рабочая частота (до 10 кГц). Очень высокие потери во
Простая неэнергоемкая система управления. включенном состоянии
Встроенный драйвер.
Электропривод;
системы
бесперебойного
питания; статические компенсаторы и активные
фильтры; ключевые источники питания
7/18
Новосибирский государственный технический университет
www.nstu.ru
8. Характеристики АД
ХАРАКТЕРИСТИКИ АДОдним из важных параметров режима работы АТД является относительное
скольжение:
n1
и
n1 n2
s
n1
n2 - соответственно частота вращения магнитного поля статора и частота
вращения ротора,
n1 n2 .
Относительное скольжение меняется от
s 1
при неподвижном роторе, до
s 0 , соответствующей синхронной скорости.
Оптимальный режим работы АТД определяется соотношением трех его
параметров: U1 , f1 , M1
8/18
Новосибирский государственный технический университет
www.nstu.ru
9.
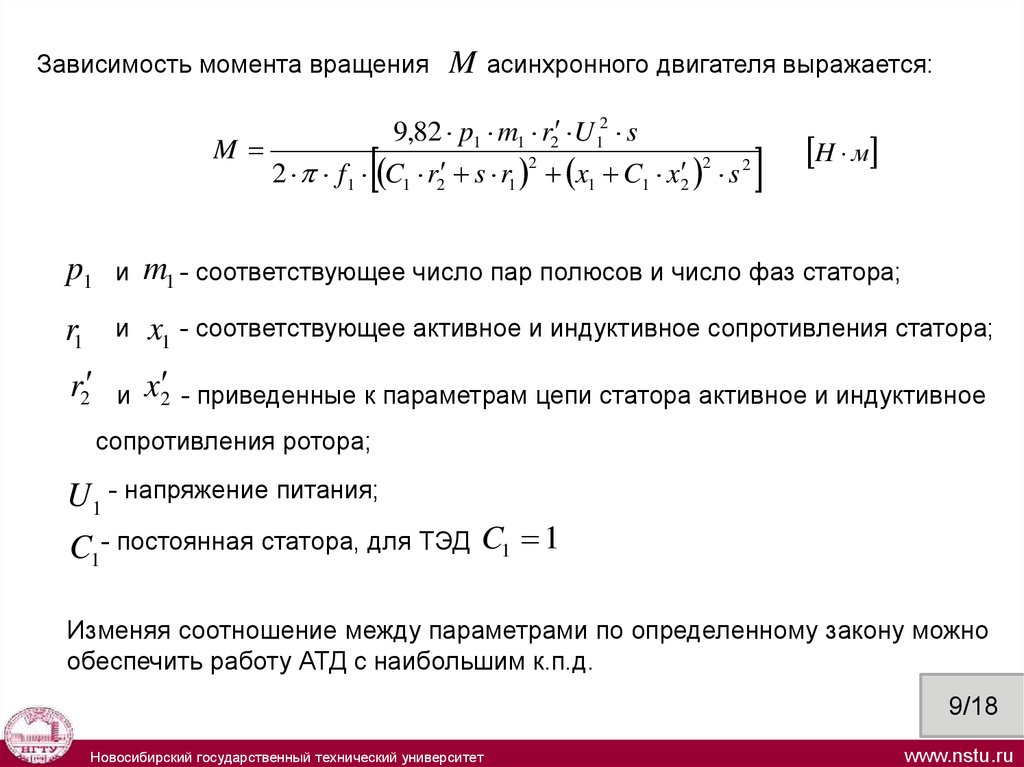
Зависимость момента вращенияM
асинхронного двигателя выражается:
9,82 p1 m1 r2 U 12 s
M
2
2
2 f1 C1 r2 s r1 x1 C1 x2 s 2
H м
p1
и
m1 - соответствующее число пар полюсов и число фаз статора;
r1
и
x1 - соответствующее активное и индуктивное сопротивления статора;
r2
и
x2
- приведенные к параметрам цепи статора активное и индуктивное
сопротивления ротора;
U1 - напряжение питания;
C1- постоянная статора, для ТЭД C1 1
Изменяя соотношение между параметрами по определенному закону можно
обеспечить работу АТД с наибольшим к.п.д.
9/18
Новосибирский государственный технический университет
www.nstu.ru
10. Системы управления ЭПС постоянного тока с АТД
Рисунок 5 – Структурные схемы АТП для ЭПС постоянного тока сасинхронными ТЭМ: а – с АИТ; б – с АИН
10/18
Новосибирский государственный технический университет
www.nstu.ru
11. Электроподвижной состав с индивидуальным питанием АТД
Рисунок 7 – Силовая схема моторного вагона с индивидуальнымпитанием АТД
Новосибирский государственный технический университет
11/18
www.nstu.ru
12. Электроподвижной состав с групповым питанием АТД
Рисунок 6 – Силовая схема моторного вагона с групповымпитанием АТД
Новосибирский государственный технический университет
12/18
www.nstu.ru
13. Элементная база
IGBT-модуль в исполнении М12-4200-6-Е3с максимальным постоянным напряжением 600 В.
Основные и предельно-допустимые параметры:
Параметр
Пробивное напряжение
коллектор-эмиттер (не
менее),В
Постоянное напряжение
силовой цепи (не более),В
Постоянный ток силовой
цепи (не более), А
Тепловое сопротивление
переход-корпус
транзистора (не более),
ºС/Вт
Тепловое сопротивление
переход-корпус диода(не
более), ºС/Вт
Рассеиваемая мощность
(не более), Вт
Обозначение
Единица
измерения
Значение
U(DR) CES
В
600
UDC
В
350
IDC
А
200
R T(j-c) VT
ºС/Вт
0,15
R T(j-c) VD
ºС/Вт
0,25
PD
Вт
830
13/18
Новосибирский государственный технический университет
www.nstu.ru
14. Элементная база
Параметры обратных диодовПараметр
Прямое падение
напряжения (типовое), В
Постоянный ток диода (не
более), А
Импульсный ток диода
при t имп =1 мс (не более),
А
Ток обратного
восстановления (типовой),
А
Время восстановления
(типовое), нс
Обозначение
VF
IF
Единица
измерения
Значение
В
2,1
А
200
А
600
А
250
нс
300
I FM
I RR
14/18
Новосибирский государственный технический университет
www.nstu.ru
15. Элементная база
Электродвигатель 125 кВт индивидуальногопривода моторной оси четырехосного низкопольного
пассажирского вагона трамвая
Технические параметры
Значение
Мощность, кВт
125
Номинальное напряжение, В
510
Номинальная частота, Гц
80
Номинальный ток, А
167
Длительно действующий момент, Нм
503
КПД, %
94,7
Номинальная частота вращения, об/мин
2371
Коэффициент мощности
0,89
Новосибирский государственный технический университет
15/18
www.nstu.ru
16. Конструкция тележек с ДПТ и АТД
16/18Новосибирский государственный технический университет
www.nstu.ru
17.
Трамвайные вагоны нового поколенияСименс
Бомбардье
Новосибирский государственный технический университет
Альстом
Прагоимекс
17/18
www.nstu.ru
18. Выводы:
замена тяговых двигателей постоянного тока наасинхронные тяговые двигатели повышает надежность
подвижного состава и снижает расходы на обслуживание;
применение
транзисторных
преобразователей
для
управления тяговыми двигателями значительно снижает
эксплуатационные расходы, связанные как с техническим
обслуживанием системы управления, так и с экономией
электроэнергии, потребляемой тяговым электроприводом;
любой
проводимый
капитально-восстановительный
ремонт подвижного состава должен сопровождаться
заменой
резисторно-контакторного
привода
транзисторной системы управления
18/18
Новосибирский государственный технический университет
www.nstu.ru
19. «Трамвай с асинхронным тяговым приводом и его характеристики»
Новосибирский государственный технический университетКафедра электротехнических комплексов
www.nstu.ru
«Трамвай с асинхронным тяговым
приводом и его характеристики»
Выполнили: студенты гр. ЭММ-13
Баранова Е.М., Заяц К.Ю.
Руководитель: д.т.н. профессор Щуров Н. И.