



– расстояние по горизонтали от оси вращения крана до вертикальной оси грузозахватного органа при установке")
 кранов и механизмов в целом (ИСО 4301/1). Группа классификации (режима) кранов в")
")

 кранов в целом (ИСО 4301/1)")
 механизмов определяется классом использования механизма (Т0 – Т9) и его режимом нагружения (L1 –")
")
































 mechanics
mechanics industry
industrySimilar presentations:




")





Основные характеристики грузоподъемных машин
1.
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕУЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ МСХА ИМЕНИ К.А. ТИМИРЯЗЕВА
Профессор Ерохин М.Н.
Ассистент Грибкова Е.В.
Грибкова Е.В.
1
2. Основные характеристики грузоподъемных машин
Грузоподъемность;
Скорость перемещений;
Высота подъема груза;
Вылет (или пролет) стрелы;
Масса машины;
Группы классификации (режима)
кранов.
Грибкова Е.В.
2
3.
ГРУЗОПОДЪЁМНОСТЬ – масса номинального рабочего груза, на подъёмкоторого рассчитана машина (кг, т).
Значения грузоподъёмности нормированы ГОСТ 1575 «Краны
грузоподъёмные. Ряды основных параметров»
Грибкова Е.В.
3
4. Скорости рабочих движений грузоподъемных механизмов
выбирают из рядов, установленныхГОСТ 1575 с учётом:
- технологических требований;
- безопасности работы;
- типа машины;
- удобства управления;
- требуемой точности установки
груза;
- пути перемещения.
Грибкова Е.В.
4
5. Вылет стрелы (l)– расстояние по горизонтали от оси вращения крана до вертикальной оси грузозахватного органа при установке
крана на горизонтальной площадкеВысота подъёма груза (h)
принимается от уровня пола для
крана без нагрузки до
грузозахватного органа,
находящегося в верхнем
положении.
Грибкова Е.В.
5
6.
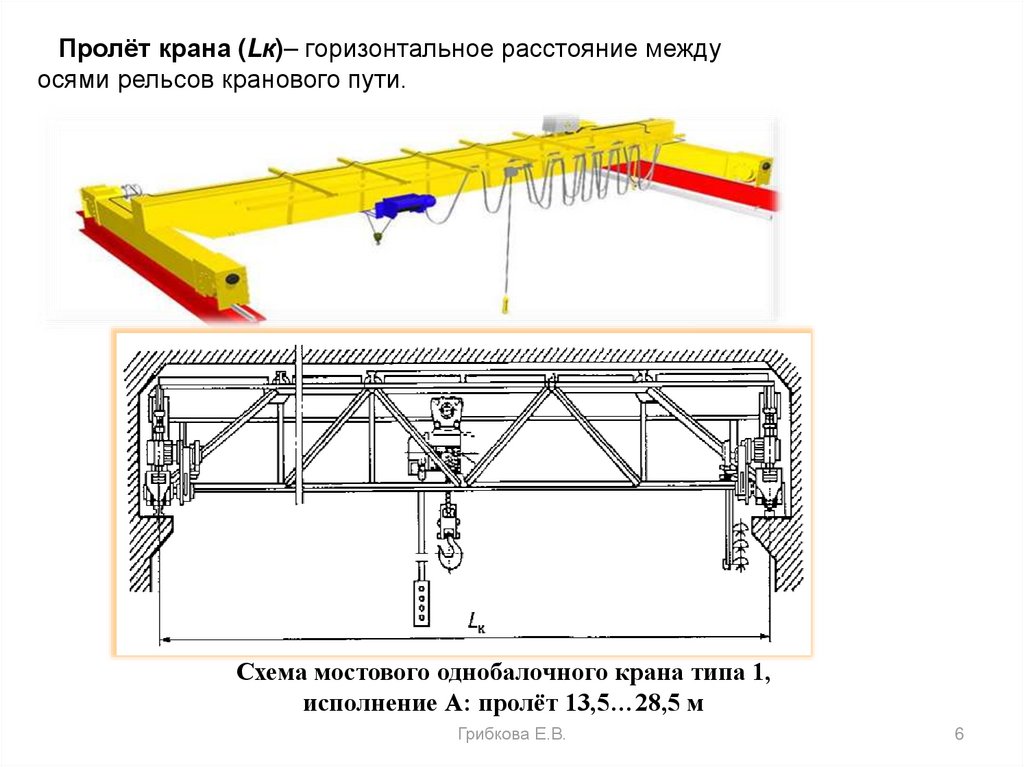
Пролёт крана (Lк)– горизонтальное расстояние междуосями рельсов кранового пути.
Схема мостового однобалочного крана типа 1,
исполнение А: пролёт 13,5…28,5 м
Грибкова Е.В.
6
7. Определение группы классификации (режима) кранов и механизмов в целом (ИСО 4301/1). Группа классификации (режима) кранов в
7Определение группы классификации (режима) кранов и
механизмов в целом (ИСО 4301/1).
Группа классификации (режима) кранов в целом определяется классом его
использования (Uо…U9) и режимом нагружения (Q1…Q4).
Класс использования (Uо…U9) характеризуется числом циклов в течение
заданного срока службы.
Режим нагружения оценивается коэффициентом распределения нагрузок:
m
C
i Рi
,
КР
i 1 C Т Рmax
n
где Сi – среднее число рабочих циклов с частным уровнем массы Рi ;
СТ – суммарно число рабочих циклов со всеми грузами.
n
C
Т
Ci
i 1
Рi – значения частных масс отдельных грузов;
Рmax – масса наибольшего груза, который
разрешается поднимать краном m = 3.
8. Число рабочих циклов (число подъемов)
8Число рабочих циклов (число подъемов)
3600 а
nц
К с К п К р КТ .пр ,
tц
где
При
a – число рабочих часов в смену;
tц - расчетное время цикла работы крана, с;
Кс - коэффициент неравномерности использования крана по
времени в течение смены (Кс = 0,5…0,8);
Кп - коэффициент простоев по организационным причинам.
отсутствии данных Кп = 0,9;
Кр - коэффициент простоев на ремонт и техобслуживание
(Кр = 0,95);
Кт.пр - коэффициент технологических простоев (Кт.пр = 0,9);
9. Расчетное время цикла
9Расчетное время цикла
Определяют исходя из фактических затрат времени на
перемещение груза и возврат грузоподъемного органа
к месту загрузки.
S кр ST
1,2(h h1 )
tц
1,35
tр,
V
Vn
V
T
кр
где
h и h1 – высота подъема и опускания груза в начале и в конце цикла, м;
Vn и VТ - скорости передвижения крана и тележки, м/с;
Sкр и SТ – протяженность хода крана и тележки, м;
tр – время ручных операций, с;
1,2 и 1,35 – учитывают снижение скорости соответственно при подъеме
и опускании груза в начале и в конце цикла и при разгоне и торможении
крана и тележки.
10. Группы классификации (режима) кранов в целом (ИСО 4301/1)
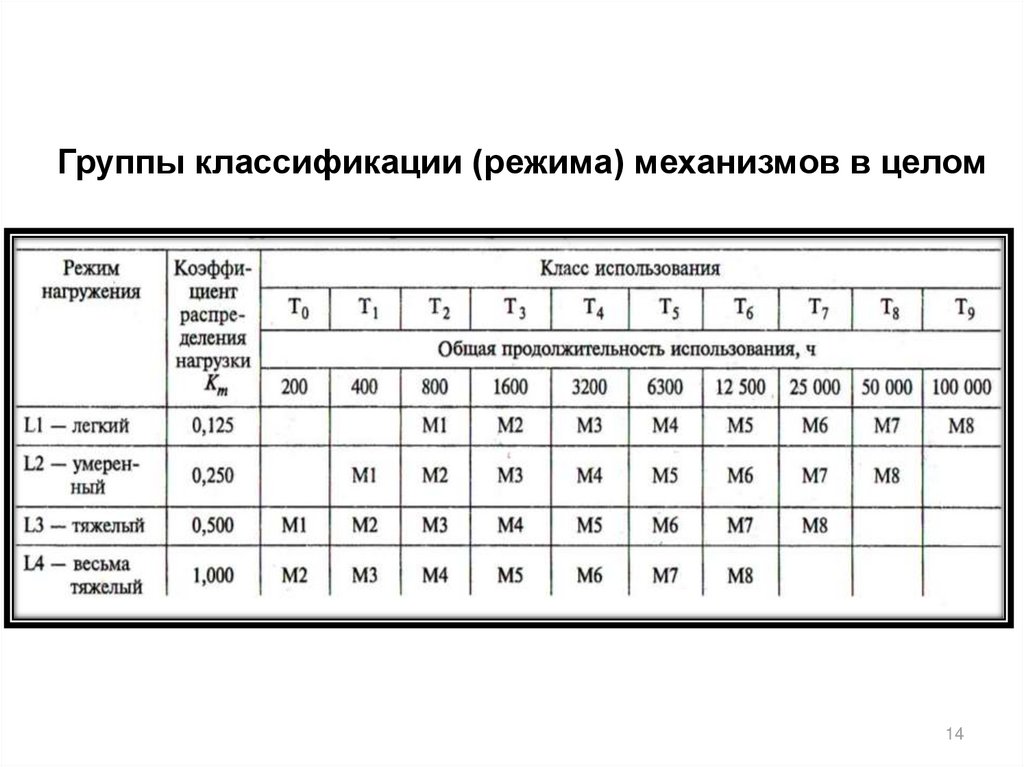
1011. Группа классификации (режима) механизмов определяется классом использования механизма (Т0 – Т9) и его режимом нагружения (L1 –
L4).Класс использования механизма (Т0 – Т9) определяется
продолжительностью использования механизма (в часах).
Режим нагружения устанавливается коэффициентом
распределения нагрузки Кm.
11
12. Класс использования механизма отражает интенсивность его использования во время эксплуатации (Т)
Т Т 0 Z дн h,где Т0 – среднесуточное время работы, ч;
Zдн – число рабочих дней в году, 250 при двух выходных
днях, 300 при одном выходном дне, 360 при непрерывном
производстве;
h – срок службы механизма (годы).
12
13. Определение коэффициента распределения нагрузки Кm
mt
i Рi
Кm
i 1 t Т Р max
n
где
ti – средняя продолжительность использования механизма при
частных уровнях нагрузки Рi , с;
tТ – общая продолжительность использования механизма при
n
частных уровнях нагрузок, с:
tT
t ;
i 1
i
Рi - значения частных нагрузок, кг;
Рmax - значение наибольшей нагрузки, приложенной к механизму, кг;
m = 3.
13
14.
Группы классификации (режима) механизмов в целом14
15. Типовые крановые механизмы
• Механизм подъема в виде лебедки вкомбинации с полиспастом;
• Механизм передвижения, который
производит перемещение крана или какойлибо его части;
• Механизм изменения вылета,
изменяющий положение грузового крюка
относительно остова;
• Механизм поворота (перемещения)
поворотной части крана.
15
16.
1617. Привод кранового механизма может быть от двигателя (парового, пневматического, внутреннего сгорания, гидравлического,
Типовые крановые механизмыПривод кранового механизма может быть от
двигателя
(парового,
пневматического,
внутреннего
сгорания,
гидравлического,
электрического)
или
ручной.
Наибольшее
распространение
имеют
электрические
двигатели
и
двигатели
внутреннего сгорания, меньше гидравлические
двигатели, ручной привод используют редко, лишь
в редко применяемых монтажных устройствах
малой грузоподъемности или как аварийные.
17
18. Типовые крановые механизмы
1819. Рабочий орган механизма – элемент, непосредственно осуществляющий рабочий процесс механизма. В механизмах подъема рабочим
Типовые крановые механизмыРабочий орган механизма – элемент,
непосредственно
осуществляющий
рабочий
процесс
механизма.
В механизмах подъема рабочим органом
является грузозахватное устройство, связанный с
ним
канатный
полиспаст
и
барабан.
В механизмах передвижения – ходовое
колесо
или
гусеница.
В механизмах вращения – опорноповоротное устройство (ОПУ), связывающую
неповоротную и поворотные части крана.
19
20.
2021.
21МЕХАНИЗМЫ ПОДЪЕМА ГРУЗОВ.
УСТРОЙСТВО И РАСЧЕТ
По характеру привода механизмы
подъема
могут быть разделены на механизмы
с ручным и механическим приводом
22. Механизм подъема
Грузозахватное устройство;
Гибкий орган;
Полиспаст;
Барабан;
Передаточный механизм;
Двигатель;
Тормозное устройство
Грибкова Е.В.
22
23.
23Механизм подъема груза
с ручным приводом
6
1 – рукоятка;
2 – тормоз;
3 – барабан;
4 – зубчатая передача;
5 – крюковая подвеска;
6 – тяговый орган
24.
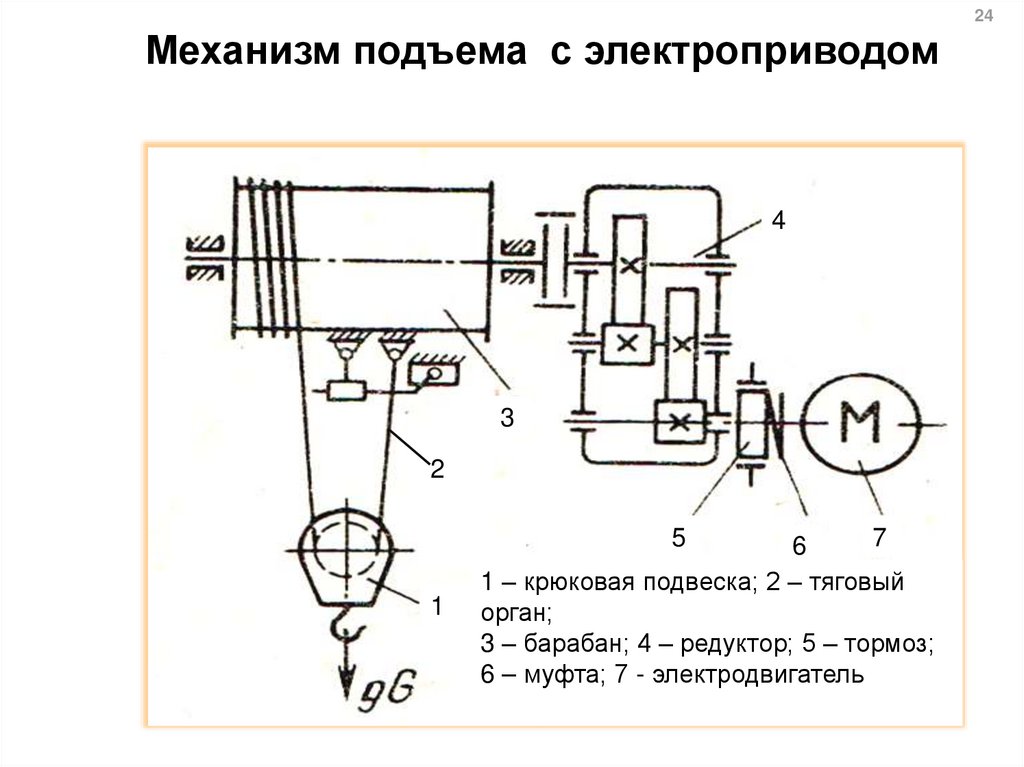
24Механизм подъема с электроприводом
4
3
2
5
1
7
6
1 – крюковая подвеска; 2 – тяговый
орган;
3 – барабан; 4 – редуктор; 5 – тормоз;
6 – муфта; 7 - электродвигатель
25.
25Исходные данные для проектирования
механизма подъема:
грузоподъемность, т;
высота подъема груза, м;
скорость подъема груза, м/с;
класс использования механизма.
26.
26Алгоритм расчета механизма подъема
1. Выбирают грузозахватный орган.
2. Выбирают по грузоподъемности тип крюковой подвески и
кратность полиспаста.
3. Определяют усилие в ветви каната, набегающей на барабан.
4. Определяют для каната величину разрушающей нагрузки и
подбирают канат.
5. Определяют размеры барабана и блоков.
6. Определяют потребную мощность двигателя.
7. Определяют общее передаточное число приводного механизма
и подбирают электродвигатель.
8. Определяют необходимый тормозной момент и подбирают
тормоз.
9. Проверяют электродвигатель по времени пуска и ускорения.
10. Проверяют тормоз по времени торможения и замедлению.
27.
Грибкова Е.В.27
28.
Грибкова Е.В.28
29.
Грибкова Е.В.29
30.
Грибкова Е.В.30
31.
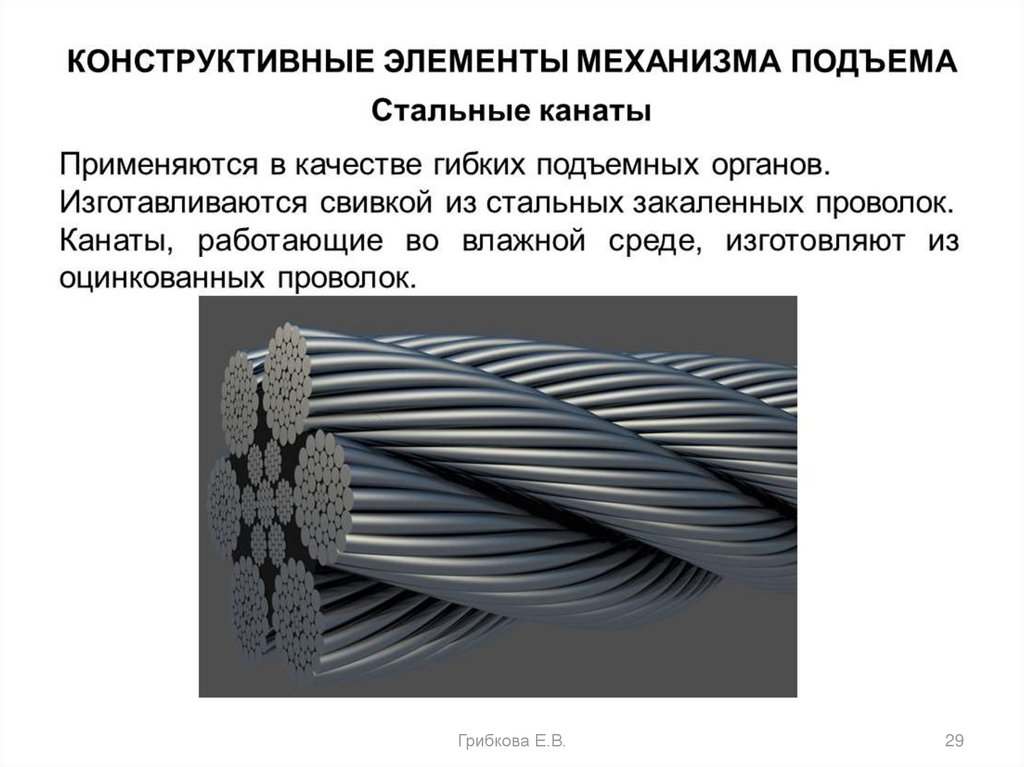
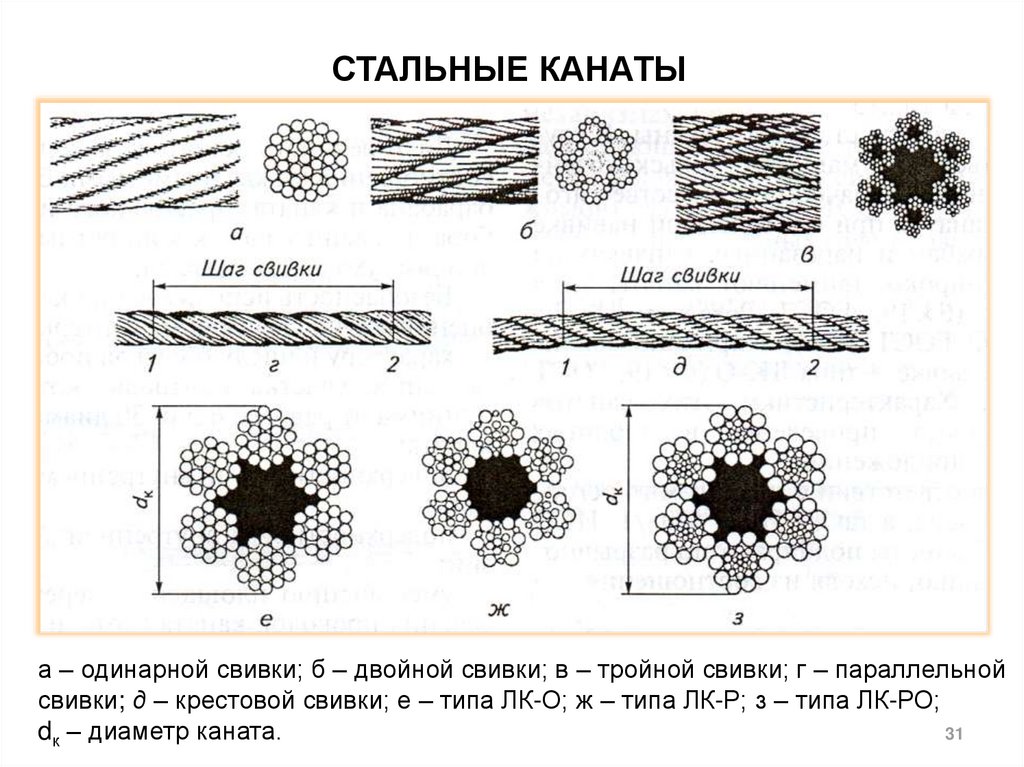
СТАЛЬНЫЕ КАНАТЫа – одинарной свивки; б – двойной свивки; в – тройной свивки; г – параллельной
свивки; д – крестовой свивки; е – типа ЛК-О; ж – типа ЛК-Р; з – типа ЛК-РО;
31
dк – диаметр каната.
32.
РЕКОМЕНДАЦИИ ПО ПОДБОРУ КАНАТОВВсе канаты стандартизованы.
В грузоподъемных машинах с.-х. назначения при
однослойной навивке на барабан и нарезанных канавках на
нем широко применяют канаты типа ЛК-Р (6х19, ГОСТ-2688) и
ЛК-РО (6х36, ГОСТ-7668), при многослойной навивке – типа ЛКО (6х19, ГОСТ-3077).
В соответствии с правилами Госгортехнадзора, а также
ИСО4308/1, ИСО4308/2 канаты подбирают по разрывному
усилию (Sразр ):
Sразр ≥ zрSmax,
где
Smax, - наибольшее натяжение тяговой ветви каната;
zр - коэффициент запаса прочности, определяемый в
зависимости от группы классификации механизма по
ИСО4301/1.
32
33. НАИБОЛЬШЕЕ НАТЯЖЕНИЕ ТЯГОВОЙ ВЕТВИ КАНАТА
S maxгде
G
,
m
aK n бл
G – сила тяжести поднимаемого груза, Н;
G = Qg;
a – число полиспастов (одинарный, сдвоенный);
Кn – кратность полиспаста;
ηбл – КПД блока;
m – число блоков.
33
34.
Грибкова Е.В.34
35. ПОЛИСПАСТЫ
ПОЛИСПАСТ – система подвижных инеподвижных блоков, соединенных
гибкой связью (канатом).
а – силовые (для увеличения силы);
б – скоростные (для увеличения
скорости).
Основные характеристики:
силового полиспаста - кратность
полиспаста - отношение числа
грузовых ветвей к тяговым ветвям;
скоростного полиспаста –
передаточное число – отношение
высоты подъема груза (H) к высоте
подъема тягового органа (l).
35
36. СХЕМЫ ПОЛИСПАСТОВ ПРЯМОГО ДЕЙСТВИЯ
а – одинарные; б – сдвоенныеОдинарные полиспасты применяют в поворотных кранах.
Сдвоенные полиспасты применяют в кранах (мостовых, козловых
и др.), где предусмотрено непосредственная навивка каната на
барабан.
Сдвоенные полиспасты предотвращают вращение груза при
подъеме и обеспечивают его подъем строго по вертикали.
36
37.
Грибкова Е.В.37
38.
38ГРУЗОЗАХВАТНЫЕ ОРГАНЫ
УНИВЕРСАЛЬНЫЕ:
крюки однорогие и
двурогие;
грузовые петли
СПЕЦИАЛЬНЫЕ:
ковши;
захваты;
грейферы;
электромагниты
39.
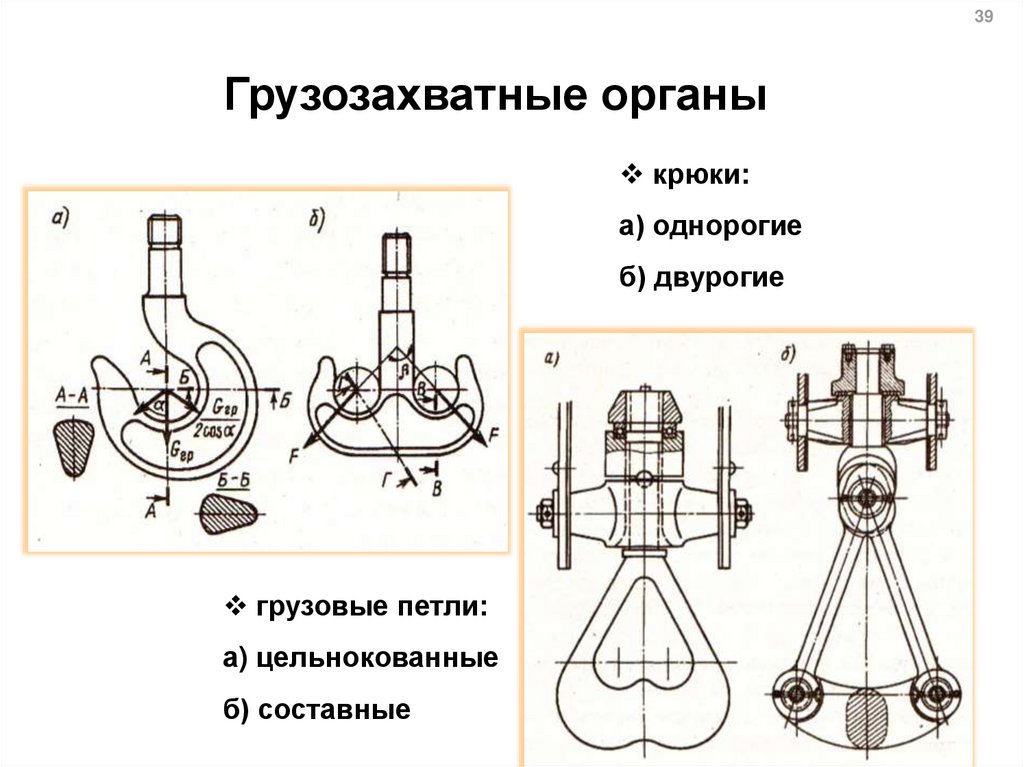
39Грузозахватные органы
крюки:
а) однорогие
б) двурогие
грузовые петли:
а) цельнокованные
б) составные
40.
40Грузозахватные органы
Захват груза стропами
41.
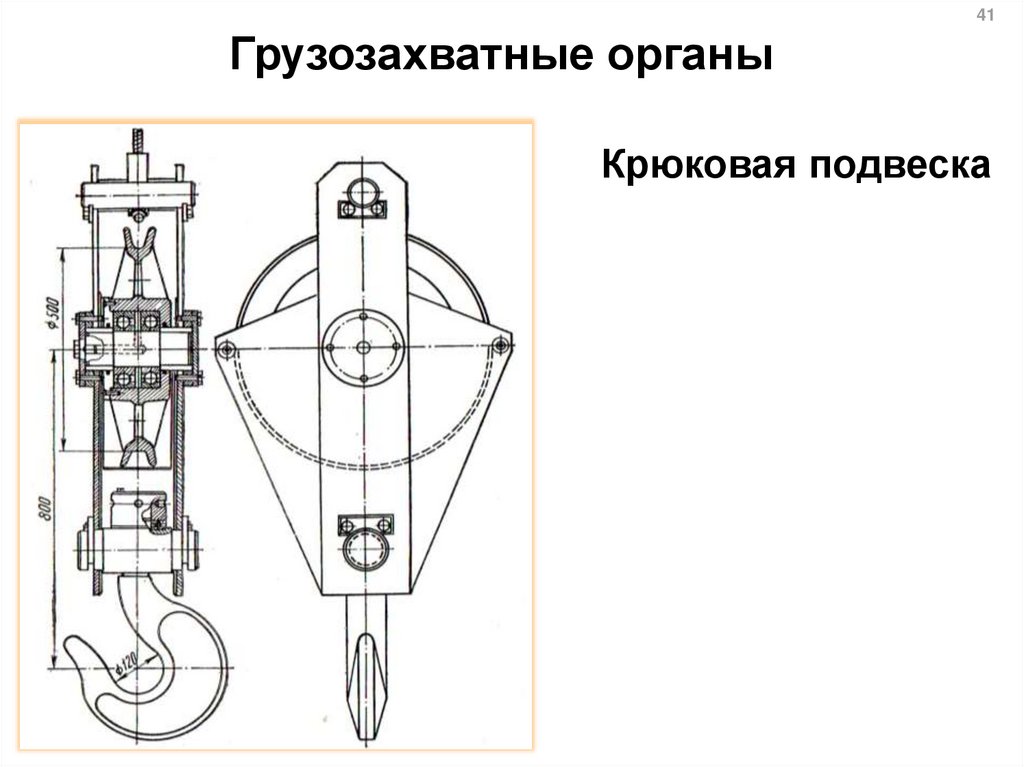
41Грузозахватные органы
Крюковая подвеска
42.
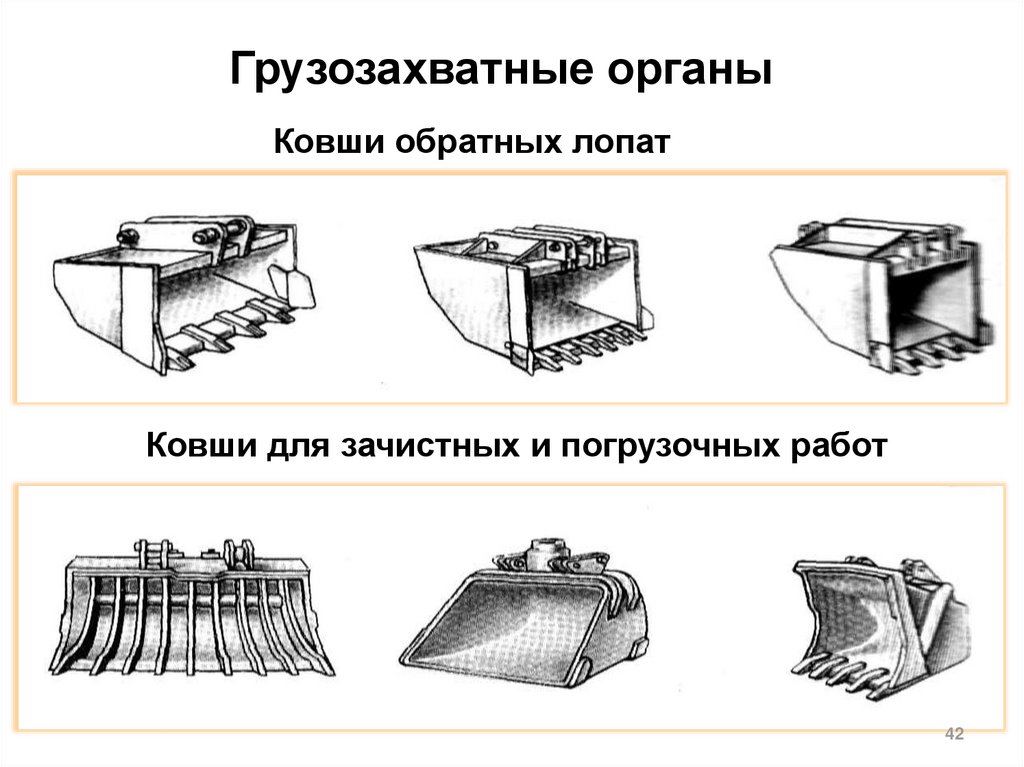
Грузозахватные органыКовши обратных лопат
Ковши для зачистных и погрузочных работ
42
43.
Грузозахватные органыСхема работы двухканатного грейфера
1 – челюсти; 2 – тяги; 3 – верхняя головка; 4 – нижняя головка;
5 – замыкающий канат; 6 – подъемный канат; 7, 8 – барабаны;
S1 и S2 – усилия в замыкающем и подъемном канатах.
43
44.
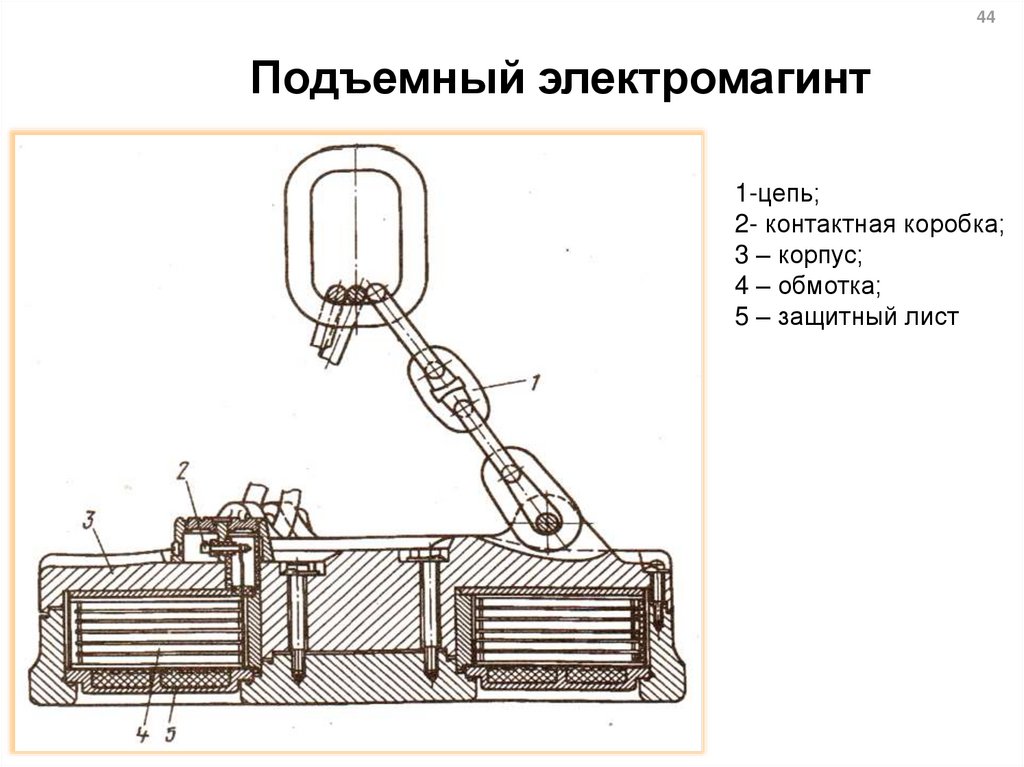
44Подъемный электромагинт
1-цепь;
2- контактная коробка;
3 – корпус;
4 – обмотка;
5 – защитный лист
45.
Сварной гладкий барабандля многослойной навивки
Литой нарезной барабан
для однослойной навивки
Грибкова Е.В.
45
46.
Грибкова Е.В.46
47. БАРАБАНЫ
аб
б – с однослойной
навивкой каната.
а – с многослойной
навивкой каната;
47
48. ПРОФИЛЬ КАНАВКИ ДЛЯ КАНАТА ПРИ ОДНОСЛОЙНОЙ НАВИВКЕ
0,02D1 6...10 мм 8ммD1 h1d кан ,
где h1 коэффициен т выбора диаметра барабана;
d кан диаметр каната.
t = dкан + (2…3 мм) – шаг нарезки витков на барабане, мм.
48
49. Определение рабочей длины барабана при однослойной навивке канатов
Lб Z pОбщее число витков на барабане
Рабочее число витков Z Lкан ,
p
Z = Zp + Zз + Zд;
Dб
где Lкан = Н·Кп; Н – высота подъема груза.
Zз = 1,5…2 – число витков, необходимое для
закрепления каната на барабане;
Zд = 1,5 – дополнительное число витков,
рекомендуемое Госгортехнадзором для разгрузки
крепления каната;
р – шаг навивки каната на барабан (см. справочник)
49
50. Расчет барабана на прочность
Стенки барабана испытывают напряжения сжатия,кручения и изгиба.
При Lб ≤ 3D1 напряжения изгиба и кручения составляют
10…15% напряжений сжатия.
В этом случае достаточен расчет на сжатие:
сж
S max
сж ,
t
где сж - допустимые напряжения материала
барабана, Мпа;
t – шаг нарезки витков на барабане, мм.
50
51. Крепление каната на барабане
а – наружными планками; б – прижатой планкой; в – клиновое крепление.51
52. Конструкции блока в сборе
а – на подшипникахкачения;
б – на подшипниках
скольжения
52
53. Профиль ручья блока
D2 ≥ h2 dканD
D3 ≥ h3 dкан
D3 , D3 – диаметры основного
и уравнительного блоков
h2 , h3 – коэффициенты
выбора диаметров блоков
53
54. Схемы к определению допустимых углов набегания каната на барабан
Для барабанов с винтовойканавкой:
hнар Lб /( 2tg60 );
Для гладких барабанов:
hгл Lб /( 2tg 2 );
0
Длина ненарезанной части
барабана для сдвоенного
Полиспаста:
аmax B 2hmin нарtg .
54
55.
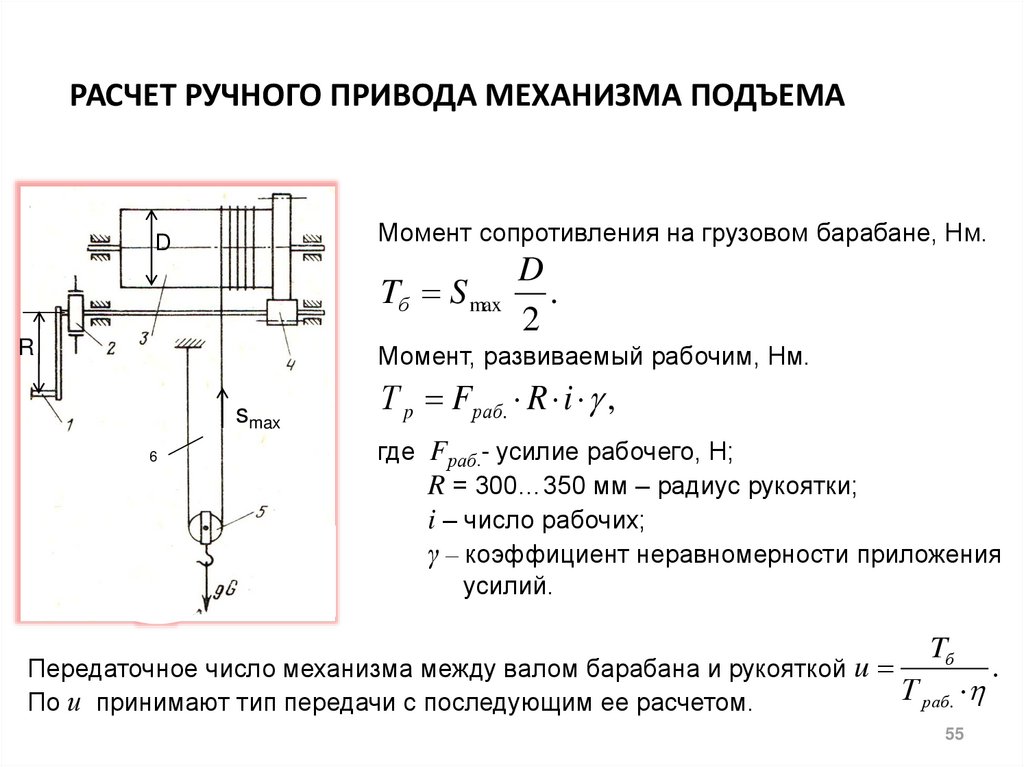
РАСЧЕТ РУЧНОГО ПРИВОДА МЕХАНИЗМА ПОДЪЕМАМомент сопротивления на грузовом барабане, Нм.
D
Tб S max
R
D
.
2
Момент, развиваемый рабочим, Нм.
smax
6
Т p Fраб. R i ,
где Fраб.- усилие рабочего, Н;
R = 300…350 мм – радиус рукоятки;
i – число рабочих;
γ – коэффициент неравномерности приложения
усилий.
T
б
.
Передаточное число механизма между валом барабана и рукояткой u
Т раб.
По и принимают тип передачи с последующим ее расчетом.
55
56.
ЭЛЕКТРОДВИГАТЕЛИ ДЛЯ МЕХАНИЗМОВ ПОДЪЕМАВ механизмах подъема используют крановые электродвигатели:
переменного тока
- серии МТК с короткозамкнутым ротором;
- серии МТ с фазовым ротором.
постоянного тока серии Д.
При малых мощностях применяют электродвигатели АИР и 5А.
Двигатели серии МТК просты в устройстве и управлении, имеют
меньшую массу, габариты и стоимость.
Их применяют при относительно небольшой частоте включений, когда не
требуется регулирование скорости (электротали, кран-балки, тихоходные
механизмы кранов).
56
57.
Электродвигатели серии МТИх недостатки:
имеют большую массу, габаритные размеры и стоимость;
они сложнее в устройстве и управлении.
Их преимущества:
позволяют регулировать скорость подъема (опускания) и торможения;
изменять в широких пределах момент при пуске и торможении и получать
требуемые ускорения;
меньше теряют энергии при переходных процессах по сравнению с
электродвигателями с короткозамкнутым ротором.
Рекомендации по использованию
При напряженных режимах работы (большие скорости, частые пуски и
остановки).
Их устанавливают в механизмах большинства кранов, подъемников и
конвейеров.
57
58. Подбор электродвигателей для механизма подъема
Подбирают по статической мощности, необходимой дляподъема максимального груза
Pc
где
G VП
o
,
G – сила тяжести груза, кН;
VП – скорость подъема груза, м/с;
ηо – общий к.п.д. механизма подъема.
Допускается применение электродвигателей с
мощностью на 10…15% меньше статической
58
59. Проверка электродвигателей по условиям пуска
1. При невыгодном сочетании нагрузок и падении напряжения в сетина 15% от номинального
TC 0,7 Tmax ,
где
Тс – момент сопротивления, приведенный к валу электродвигателя, Нм;
Тmax – максимальный пусковой момент электродвигателя (по каталогу).
2. По времени пуска
где
(m D 2 )O
tП
t ПО t П ,
38 TH
(m D 2 )O 1,2 (m D 2 ) P (m D 2 )T (m D 2 ) ГР , общий маховой момент;
(m D 2 ) P и (m D 2 )T - маховые моменты ротора двигателя и тормозной муфты;
(m D 2 ) ГР
- маховой момент груза, приведенный к валу двигателя;
tПО - поправка (по справочнику);
[tП ] = 1…2 с.
59
60. Проверка по ускорению пуска
a [aср ]Для механизмов подъема кранов общего назначения
При
Pдв < Рс
[aср ] = 0,3…0,6 м/с2
двигатель проверяют на надежность работы при
соответствующем режиме:
Pдв
≥
КРэ .
ПВ%
15
25
40
60
К
0,5
0,75
1
1,5
Эквивалентная мощность
Рэ Рс
где γ – коэффициент, определяемый по графику в зависимости
от величины tП / tраб.;
tраб. = lраб. / VП. - продолжительность рабочей операции.
60