






 mechanics
mechanics industry
industrySimilar presentations:

")








Грузоподъемные машины, их классификация, основные параметры и режимы работы
1. ЛЕКЦИЯ
Грузоподъемные машины, ихклассификация, основные
параметры и режимы работы
2.
Грузоподъемные машины (ГПМ) предназначены для подъема, перемещения и подачи грузав требуемое место, обслуживаемое машиной.
Конструкция грузоподъемных машин зависит от вида груза, условий применения и степени
сложности. В состав ГПМ может входить несколько рабочих механизмов – подъема груза,
передвижения и поворота крана, изменения вылета крюка.
ГПМ в зависимости от назначения, области применения и выполняемой функции
классифицируют на:
- подъемные механизмы;
- краны;
- подъемники;
- промышленные роботы.
Рис. 1. Грузоподъемные механизмы:
а, б, в - домкраты; г – полиспаст; д – лебедка с ручным приводом
К подъемным механизмам относятся механизмы, выполняющие одно движение – подъем:
домкраты, лебедки и тали.
Домкраты предназначены для подъема груза на небольшую высоту в основном при монтаже и
ремонтных работах. По конструкции их разделяют на реечные, винтовые, гидравлические и
пневматические (рис. 1, а, б, в).
Лебедки (рис. 1, д) служат для подъема груза или перемещения его в горизонтальном направлении.
Изготавливаются с ручным и электроприводом. По типу тягового элемента лебедки различают
канатные и цепные; по типу установки – неподвижные (закрепленные на полу, стене, потолке) и
передвижные (на тележках, передвигающиеся по полу или по подвесным путям); по числу барабанов
одно-, двух- и многобарабанные; по типу барабана – на нарезные, гладкие и фрикционные (шпили).
3.
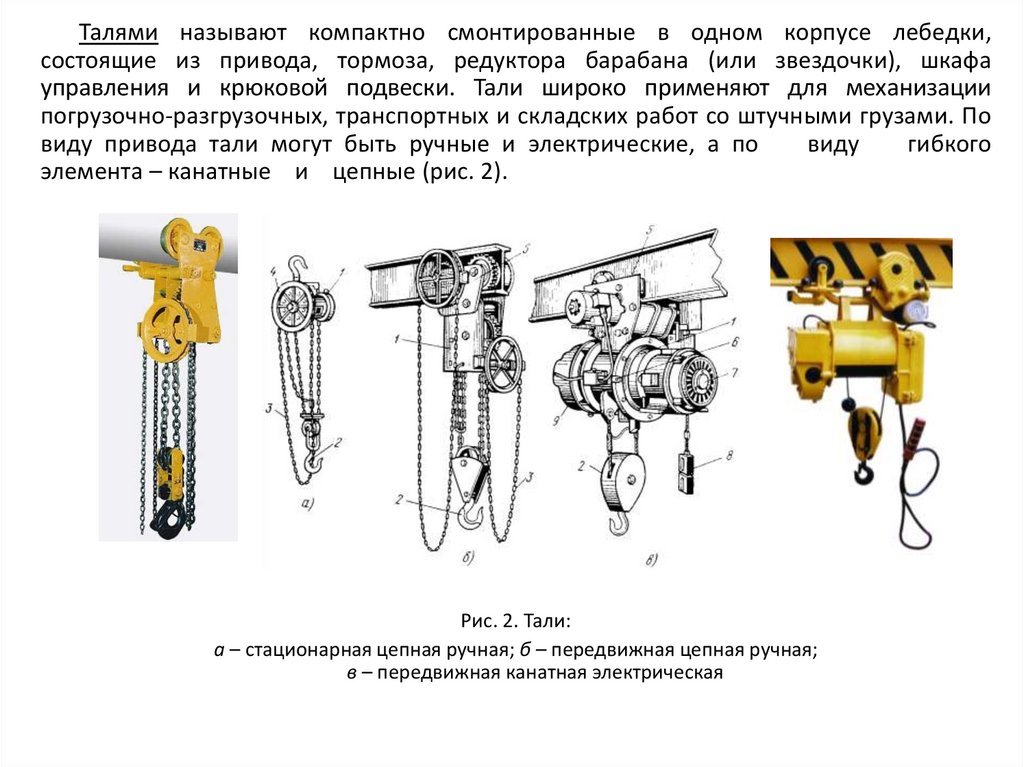
Талями называют компактно смонтированные в одном корпусе лебедки,состоящие из привода, тормоза, редуктора барабана (или звездочки), шкафа
управления и крюковой подвески. Тали широко применяют для механизации
погрузочно-разгрузочных, транспортных и складских работ со штучными грузами. По
виду привода тали могут быть ручные и электрические, а по
виду
гибкого
элемента – канатные и цепные (рис. 2).
Рис. 2. Тали:
а – стационарная цепная ручная; б – передвижная цепная ручная;
в – передвижная канатная электрическая
4.
Грузоподъемные краны – машины циклическогодействия, предназначенные для подъема и
перемещения в пространстве груза, удерживаемого
грузозахватным устройством. В зависимости от
области обслуживания и конструкции краны делят
на две группы: пролетные и стреловые. Краны
первой группы (мостовые, козловые и полукозловые,
перегрузочные мосты, настенные передвижные
консольные краны, мостовые краны-штабелеры)
перекрывают пролет и обслуживают зону вдоль
этого пролета.
Краны второй группы снабжены стрелой и
выполняются в основном передвижными (на большие
и ограниченные расстояния) и стационарными.
К ним относятся: поворотные краны на колонне,
стреловые передвижные
краны
со стрелой,
башенные, портальные и полупортальные, вантовые
краны и т.п. (рис. 3).
Рис. 3. Грузоподъемные краны:
а – мостовой; б – козловой; в – автомобильный; г – башенный;
д – портальный; е – консольный; ж, з – соответственно
мостовой и стеллажный краны-штабелеры
5.
К кранам мостового типа относят мостовые и козловые краны, которые включают несущуюстальную конструкцию мост 3 с ходовыми колесами 1 и
механизм передвижения 2. По мосту передвигается
грузовая тележка 4 на раме которой смонтированы
механизм подъема груза с крюком и механизм
передвижения тележки.
Типовой механизм подъема груза состоит из двигателя 1,
тормозного устройства 3, передаточного механизма 4
и барабана 6, которые соединены зубчатыми муфтами 5.
На барабан намотан канат 9 полиспаста 8, который соединен
с блоками крюковой подвески 7. Груз с помощью строп
подвешивается на крюк подвески.
Двигатель может быть гидравлическим, электрическим;
при редкой работе крана применяют ручной привод.
Тормозное устройство предназначено для затормаживания
механизма с грузом и удерживания поднятого груза в
подвешенном состоянии.
Рис. 4. Кинематическая схема механизма подъема с полиспастами:
а – одинарным; б – сдвоенным
1 – двигатель; 2 – упругая муфта; 3 – тормоз; 4 – передаточный механизм;
5 – зубчатая муфта; 6 – барабан; 7 – крюковая подвеска; 8 – полиспаст;
9 –канат; 10 – направляющие блоки
6.
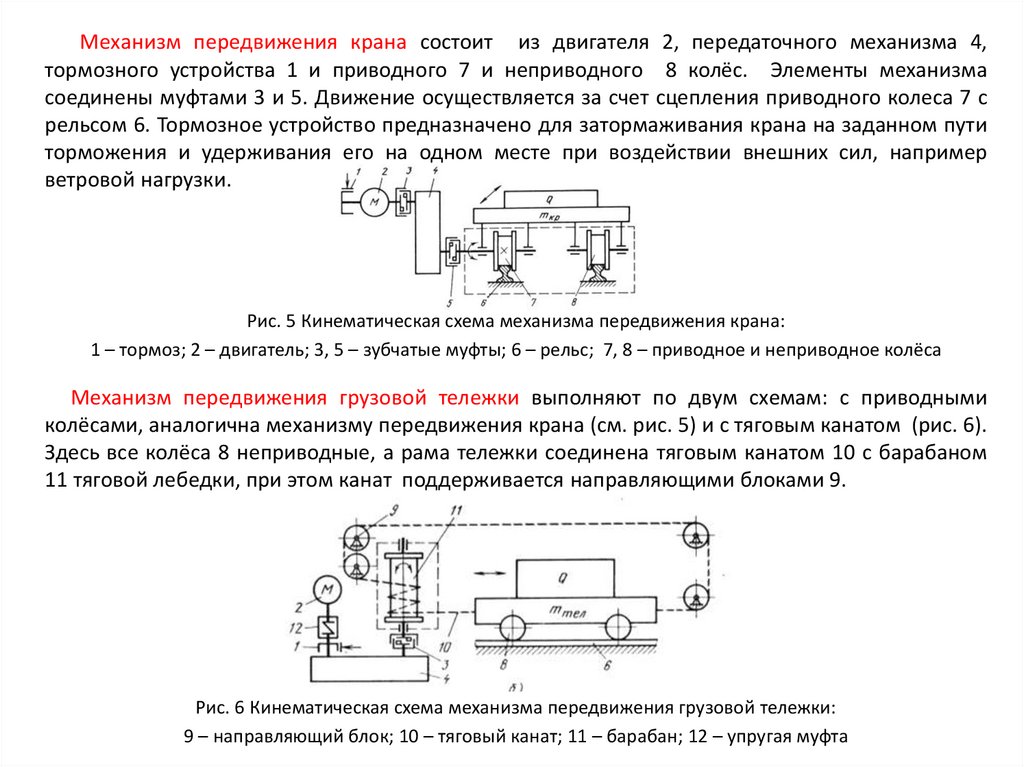
Механизм передвижения крана состоит из двигателя 2, передаточного механизма 4,тормозного устройства 1 и приводного 7 и неприводного 8 колёс. Элементы механизма
соединены муфтами 3 и 5. Движение осуществляется за счет сцепления приводного колеса 7 с
рельсом 6. Тормозное устройство предназначено для затормаживания крана на заданном пути
торможения и удерживания его на одном месте при воздействии внешних сил, например
ветровой нагрузки.
Рис. 5 Кинематическая схема механизма передвижения крана:
1 – тормоз; 2 – двигатель; 3, 5 – зубчатые муфты; 6 – рельс; 7, 8 – приводное и неприводное колёса
Механизм передвижения грузовой тележки выполняют по двум схемам: с приводными
колёсами, аналогична механизму передвижения крана (см. рис. 5) и с тяговым канатом (рис. 6).
Здесь все колёса 8 неприводные, а рама тележки соединена тяговым канатом 10 с барабаном
11 тяговой лебедки, при этом канат поддерживается направляющими блоками 9.
Рис. 6 Кинематическая схема механизма передвижения грузовой тележки:
9 – направляющий блок; 10 – тяговый канат; 11 – барабан; 12 – упругая муфта
7.
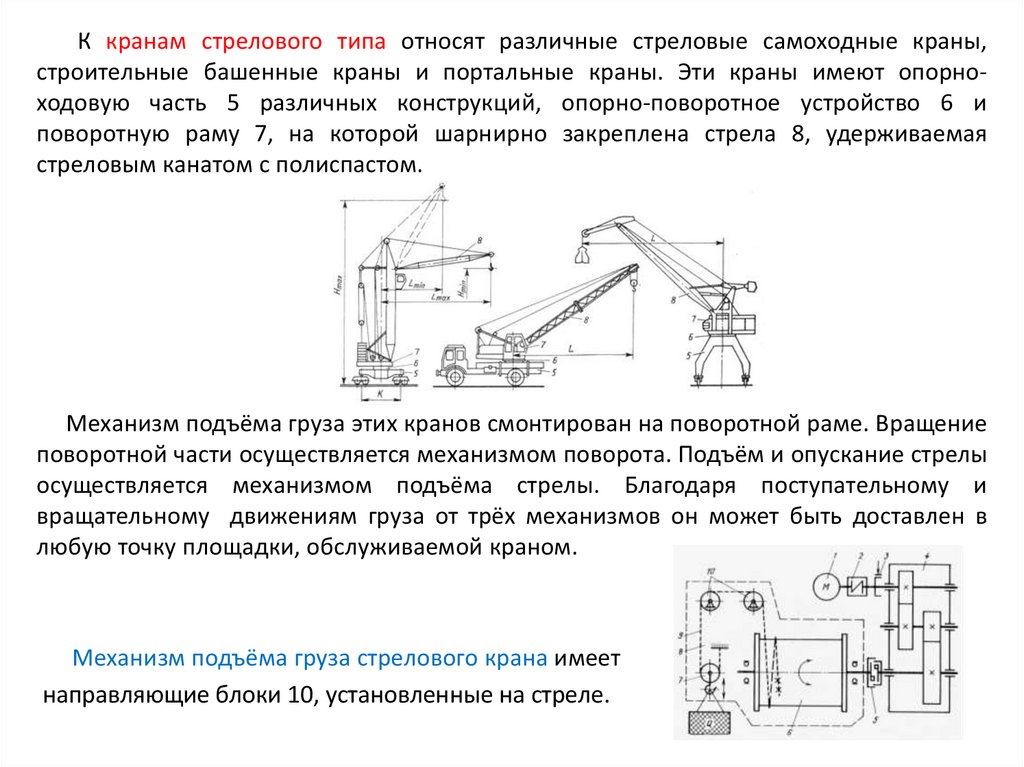
К кранам стрелового типа относят различные стреловые самоходные краны,строительные башенные краны и портальные краны. Эти краны имеют опорноходовую часть 5 различных конструкций, опорно-поворотное устройство 6 и
поворотную раму 7, на которой шарнирно закреплена стрела 8, удерживаемая
стреловым канатом с полиспастом.
Механизм подъёма груза этих кранов смонтирован на поворотной раме. Вращение
поворотной части осуществляется механизмом поворота. Подъём и опускание стрелы
осуществляется механизмом подъёма стрелы. Благодаря поступательному и
вращательному движениям груза от трёх механизмов он может быть доставлен в
любую точку площадки, обслуживаемой краном.
Механизм подъёма груза стрелового крана имеет
направляющие блоки 10, установленные на стреле.
8.
Механизм поворота может быть выполнен с поворотной колонной (рис. 7, а) иопорным кругом (рис. 7, б), который состоит из двигателя 1, тормозного устройства 3,
передаточного механизма 4 с шестернёй, которая входит в зацепление с зубчатым
колесом 8 опорно-поворотного устройства 7. Наиболее широко применяют
шариковые и роликовые поворотные устройства.
Рис. 7 Кинематическая схема механизма поворота:
а – с поворотной колонной; б – с опорным кругом
1 – двигатель; 2 – муфта; 3 – тормоз; 4 – передаточный механизм;
5 – опорно-поворотное устройство с поворотной колонной; 6 – фрикционная муфта;
7 – опорно-поворотное устройство с поворотным кругом; 8 – зубчатое колесо
9.
Вылетом стрелы называется расстояние от оси вращения поворотной части крана до осигрузозахватного органа.
Механизмы изменения вылета стрелы выполняют по трём вариантам (рис. 8):
-подъём и опускание стрелы 8 с помощью стрелового полиспаста 7, который со
стреловой лебедкой по конструктивному исполнению аналогичен механизму подъёма
груза (см. рис. 4, а) ;
- перемещение грузовой тележки по стреле; этот механизм по конструктивному
исполнению аналогичен механизму передвижения тележки с тяговым канатом (см. рис.
6) ;
- взаимное перемещение элементов стрелы, осуществляемое выдвижением
телескопических секций стрелы 11 с помощью гидроцилиндров 9 и подъёмом и
опусканием стрелы с помощью гидроцилиндра 10.
Рис. 8 Кинематические схемы механизма изменения вылета стрелы:
а – с подъёмной стрелой; б – с телескопической стрелой
1 –тормоз; 2 - передаточный механизм; 3 – упругая муфта; 4 – двигатель; 5 – зубчатая муфта; 6 – барабан;
7 – стреловой полиспаст; 8 – стрела; 9 – гидроцилиндр для выдвижения секции стрелы;
10 – гидроцилиндр для подъёма стрелы; 11 – секция стрелы
10.
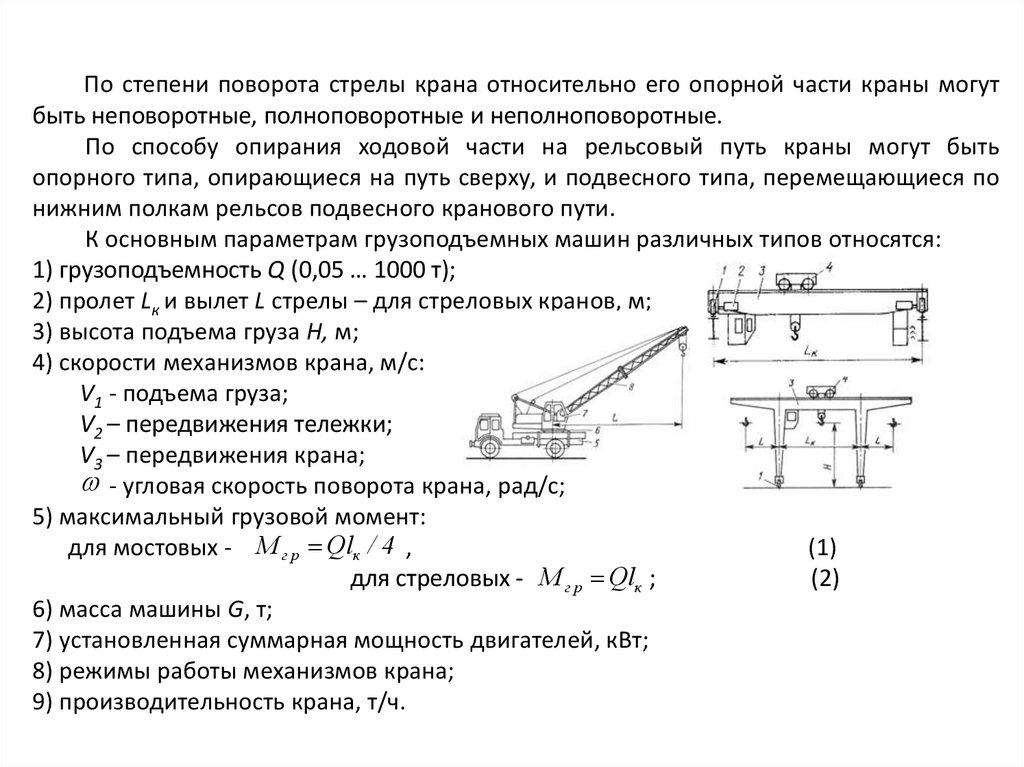
По степени поворота стрелы крана относительно его опорной части краны могутбыть неповоротные, полноповоротные и неполноповоротные.
По способу опирания ходовой части на рельсовый путь краны могут быть
опорного типа, опирающиеся на путь сверху, и подвесного типа, перемещающиеся по
нижним полкам рельсов подвесного кранового пути.
К основным параметрам грузоподъемных машин различных типов относятся:
1) грузоподъемность Q (0,05 … 1000 т);
2) пролет Lк и вылет L стрелы – для стреловых кранов, м;
3) высота подъема груза H, м;
4) скорости механизмов крана, м/с:
V1 - подъема груза;
V2 – передвижения тележки;
V3 – передвижения крана;
- угловая скорость поворота крана, рад/с;
5) максимальный грузовой момент:
для мостовых - М г p Qlк / 4 ,
(1)
для стреловых - М г p Qlк ;
(2)
6) масса машины G, т;
7) установленная суммарная мощность двигателей, кВт;
8) режимы работы механизмов крана;
9) производительность крана, т/ч.
11.
Скорости движения различных механизмов выбираютв зависимости от
технологического процесса, в котором участвует данная ГПМ, от характера ее работы
и потребной производительности. Соответствующими стандартами установлены
нормальные ряды скоростей для различных органов.
Скорость подъема груза, зависящая от грузоподъемности крана и ряда
технологических факторов, в современных мостовых кранах обычно не превышает
25…30 м/мин.
Скорость передвижения моста крана достигает 100…120 м/мин, а его тележек –
35…50 м/мин.
Частота вращения стрелы достигает 3 мин-1 в зависимости от скорости конца
стрелы, не превышающей 5…6 м/с.
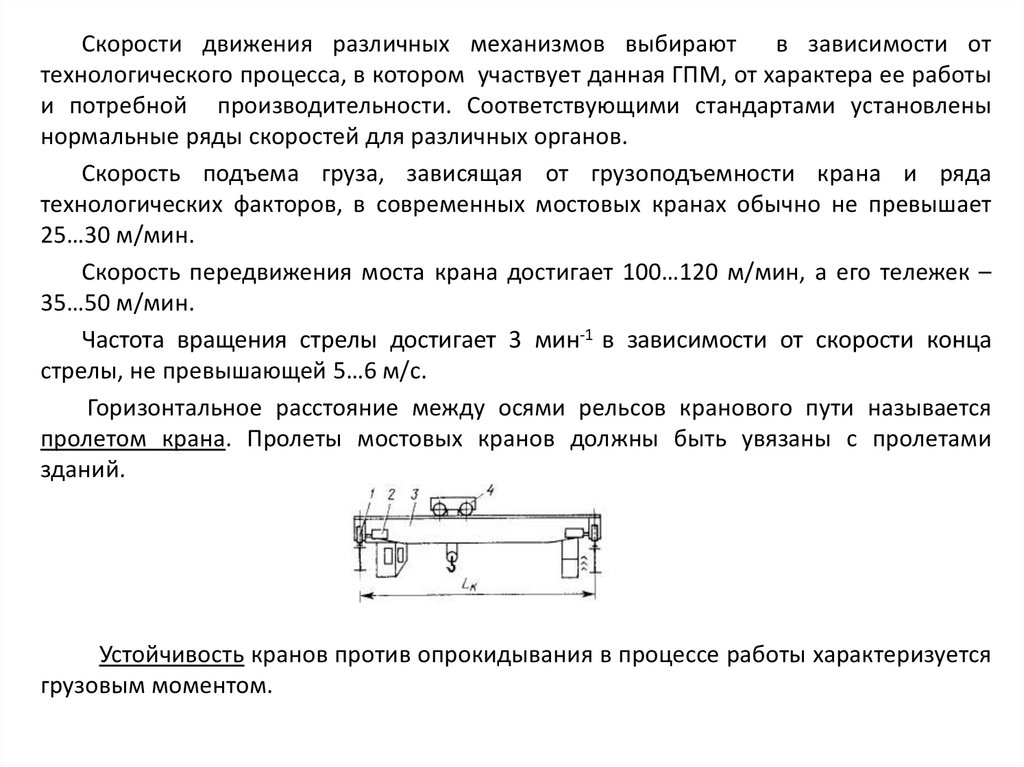
Горизонтальное расстояние между осями рельсов кранового пути называется
пролетом крана. Пролеты мостовых кранов должны быть увязаны с пролетами
зданий.
Устойчивость кранов против опрокидывания в процессе работы характеризуется
грузовым моментом.
12.
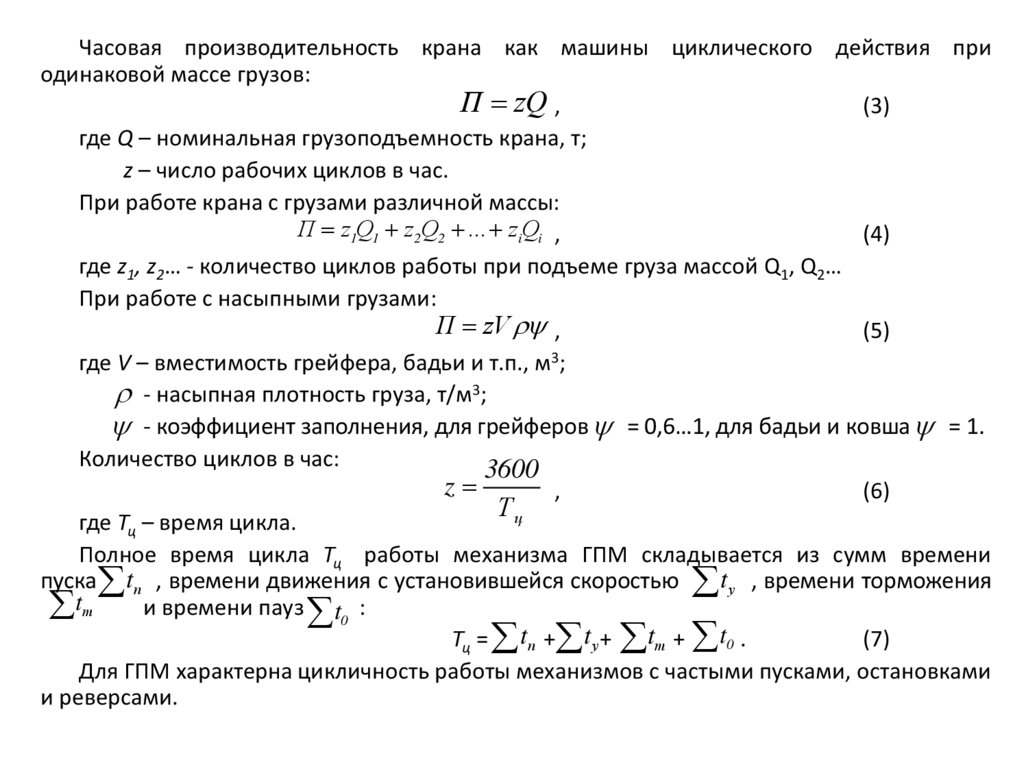
Часовая производительность крана как машины циклического действия приодинаковой массе грузов:
П zQ ,
(3)
где Q – номинальная грузоподъемность крана, т;
z – число рабочих циклов в час.
При работе крана с грузами различной массы:
П z1Q1 z2Q2 ... ziQi ,
(4)
где z1, z2… - количество циклов работы при подъеме груза массой Q1, Q2…
При работе с насыпными грузами:
П zV ,
(5)
где V – вместимость грейфера, бадьи и т.п., м3;
- насыпная плотность груза, т/м3;
- коэффициент заполнения, для грейферов = 0,6…1, для бадьи и ковша = 1.
Количество циклов в час:
3600
z
,
(6)
Тц
где Тц – время цикла.
Полное время цикла Тц работы механизма ГПМ складывается из сумм времени
пуска tп , времени движения с установившейся скоростью t у , времени торможения
tт и времени пауз t0 :
Тц = tп + t у + tт + t0 .
(7)
Для ГПМ характерна цикличность работы механизмов с частыми пусками, остановками
и реверсами.
13.
Режим работы – это совокупность факторов, определяющих его эксплуатацию.Он характеризуется спектром нагрузок и длительностью их действия. В зависимости
от режима работы механизма определяют нагрузки, производят расчет двигателя и
тормоза, принимают запасы прочности, выполняют расчеты деталей на
выносливость, определяют сроки службы элементов крана.
Нормами РОСТЕХНАДЗОРА предусмотрено пять режимов работы крановых
механизмов: Р – ручной; Л – легкий; С – средний; Т – тяжелый; ВТ – весьма тяжелый.
Установлена новая классификация крановых механизмов по группам режимов
работы, которые определяются в зависимости от класса использования их по
времени работы и класса нагружения.
Класс использования механизмов А0, А1, А2…А6 отражает интенсивность
использования механизма во время его эксплуатации. Классы нагружения
механизмов В1…В4 отражают относительную нагрузку механизма в соответствии со
спектром нагрузок и они зависят от значения коэффициента нагружения.
В зависимости от сочетаний класса использования и класса нагружения
устанавливается группа режима работы механизмов (шесть групп).
14.
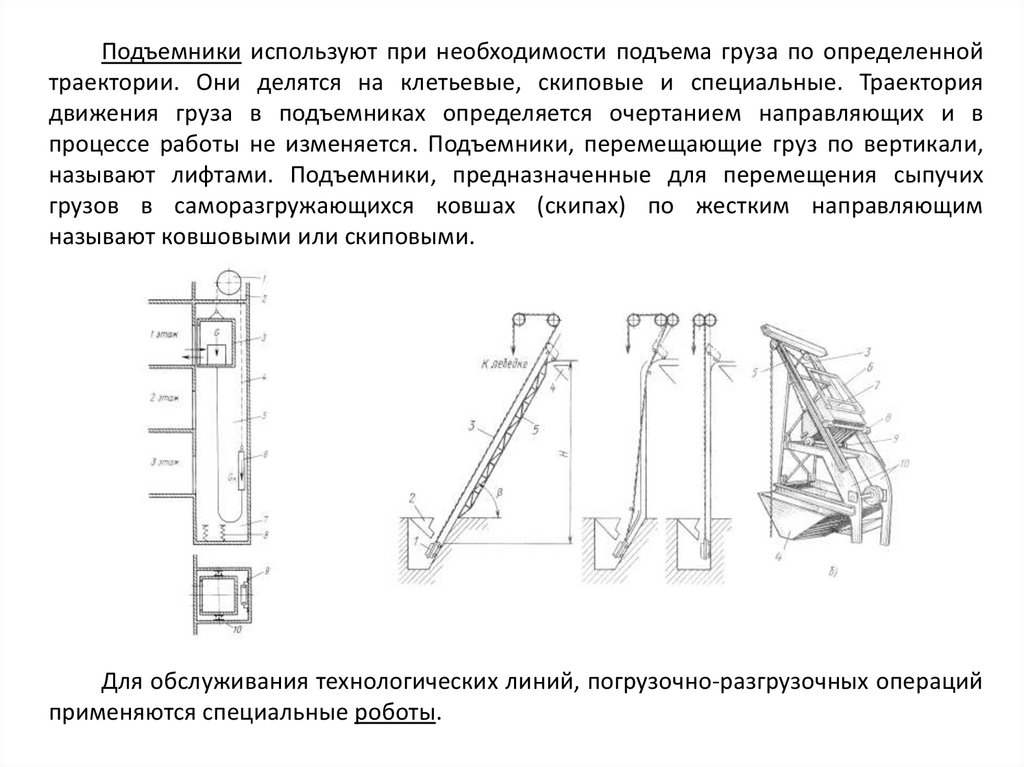
Подъемники используют при необходимости подъема груза по определеннойтраектории. Они делятся на клетьевые, скиповые и специальные. Траектория
движения груза в подъемниках определяется очертанием направляющих и в
процессе работы не изменяется. Подъемники, перемещающие груз по вертикали,
называют лифтами. Подъемники, предназначенные для перемещения сыпучих
грузов в саморазгружающихся ковшах (скипах) по жестким направляющим
называют ковшовыми или скиповыми.
Для обслуживания технологических линий, погрузочно-разгрузочных операций
применяются специальные роботы.