



















")










 industry
industrySimilar presentations:


")
")
")





Проектирование транспортной системы в машиностроительном производстве
1.
ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТФАКУЛЬТЕТ МАШИНОСТРОЕНИЯ И ТРАНСПОРТА
Кафедра технологии машиностроения
ЛЕКЦИЯ
для проведения занятия по дисциплине
«Проектирование машиностроительного производства»
Тема № 5
Проектирование транспортной системы
Таранцев Константин Валентинович,
к.т.н., доцент
Пенза, 2018
2.
II. Расчет учебного времениСодержание и порядок проведения занятия
ВСТУПИТЕЛЬНАЯ ЧАСТЬ
Стадии жизненного цикла изделия
ОСНОВНАЯ ЧАСТЬ
1. Классификация машиностроительных производств
2. Тип (характер) производства
1. Описание единичного производства
2. Описание серийного производства
3. Описание массового производства
4. Характеристики типов производств
5. Коэффициент закрепления операций
3. Формы организации производства
4. Классификация механических цехов по характеру
конструкции и массу изделия
ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ
Расчет показателей (пример)
Время
мин
3. ВСТУПИТЕЛЬНАЯ ЧАСТЬ
Транспортное хозяйство - это комплекс средствпредприятия, предназначенных для перевозки сырья,
материалов, полуфабрикатов, готовой продукции,
отходов и др. грузов на территории предприятия и за его
пределами.
4.
Назначение транспортного хозяйства: перемещение грузов каквнутри предприятия, так и за его пределами, а также:
доставка со склада грузов в требуемый момент времени к
требуемому производственному участку;
доставка, ориентирование и установка заготовок, полуфабрикатов
или изделий в требуемый момент времени на требуемое основное
оборудование;
съем полуфабрикатов или готовых изделий с оборудования и
последующее транспортирование их к месту назначения;
отправка грузов в накопитель и выдача их из накопителя в требуемый
момент времени;
доставка полуфабрикатов или готовых изделий с производственных
участков на склад.
5.
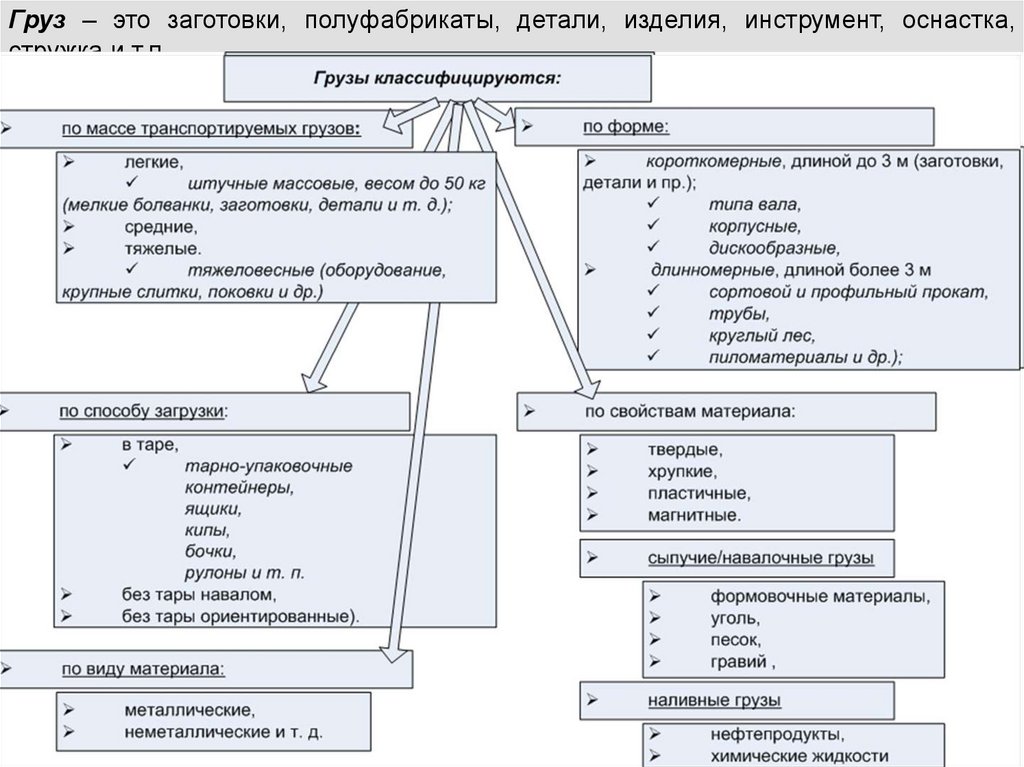
1. Классификация грузовПри выборе способа транспортирования и элементов
транспортной системы следует ориентироваться на разработанную
классификацию грузов и транспортных систем.
Грузы классифицируют по транспортно-технологическим
характеристикам: массе, размеру, форме, способу загрузки, виду и
свойствам.
Для более подробной характеристики грузопотоков в целях
оптимального выбора транспортной системы разбивка грузов на группы
производится следующим образом:
по массе транспортируемых грузов
легкие от 0,01 до 0,5 кг,
средние от 0,5 до 16 кг
тяжелые свыше 16 кг;
6.
Груз – это заготовки, полуфабрикаты, детали, изделия, инструмент, оснастка,стружка и т.п.
6
7.
2. Транспортные системы классифицируютпо назначению — внутрицеховые и межоперационные;
по способу перемещения — грузы в таре и без тары;
ориентированные и навалом;
по принципу движения — периодические и непрерывные;
по направлению движения — прямоточные и возвратные;
по уровню расположения рабочей ветви — напольные, эстакадные и
подвесные;
по принципу работы — несущие, толкающие и тянущие;
по схеме движения — линейные и замкнутые, ветвящиеся и
неветвящиеся;
по конструктивному исполнению — рельсовые и безрельсовые;
по принципу маршрутослежения — механические (по
направляющим), на приборах с зарядной связью, индуктивные,
гироскопические, оптоэлектронные и радиоуправляемые.
8.
Автоматическая транспортная система — совокупностьвзаимосвязанных автоматически действующих средств для
транспортирования приведённых выше предметов в
системе автоматически работающих машин (станков).
Автоматизированная транспортная система отличается
от автоматической тем, что транспортно-загрузочные
операции автоматизированы частично.
9.
Классификация транспортных систем:по назначению:
в таре,
тарно-упаковочные
контейнеры,
ящики,
кипы,
бочки,
рулоны и т. п.
без тары навалом,
без тары ориентированные).
по принципу движения:
периодические
непрерывные.
несущие,
толкающие
тянущие.
по схеме движения:
напольные,
эстакадные
подвесные.
по принципу работы:
прямоточные
возвратные.
по уровню расположению рабочей ветви:
по способу перемещения:
механические (по направляющим),
на приборах с зарядной связью,
индуктивные,
гироскопические,
оптоэлектронные,
радиоуправляемые.
по направлению движения:
межцеховые,
внутрицеховые,
межоперационные.
по принципу маршрутослежения:
линейные
замкнутые,
ветвящиеся
неветвящиеся.
по конструктивному исполнению
рельсовые
безрельсовые.
9
10. Виды транспорта транспортного хозяйства машиностроительного предприятия
Внешний транспорт (служит длясвязи завода с ближайшими
магистралями и другими
промышленными и
хозяйственными предприятиями)
автомобили,
железнодорожные вагоны,
грузовые самолеты,
водные транспортные средства.
Межцеховой транспорт (служит
для перевозки грузов между цехами и
складами)
Виды транспорта
транспортного хозяйства
машиностроительного
предприятия
электровозы,
мотовозы,
автомобили,
гужевой транспорт,
тракторы,
электро- и автокары,
мотороллеры.
Внутрицеховой транспорт
(предназначен для перемещения
грузов внутри цеха; он
обслуживает станки, сборочные
стенды, рабочие места, цеховые и
складские помещения)
• электро- и автокары,
• транспортеры различного типа
(ленточные, цепные, пластинчатые),
• краны
(мостовые, консольные, поворотные),
• монорельсы,
• ручные тележки.
Межоперационный транспорт
предназначен для доставки и установки
заготовок, полуфабрикатов или готовых
изделий в требуемый момент времени на
требуемое оборудование, их съема с
оборудования с последующим
транспортированием в заданный адрес
ручные тележки,
транспортеры,
мостовые краны,
рольганги,
монорельсы,
склизы.
11.
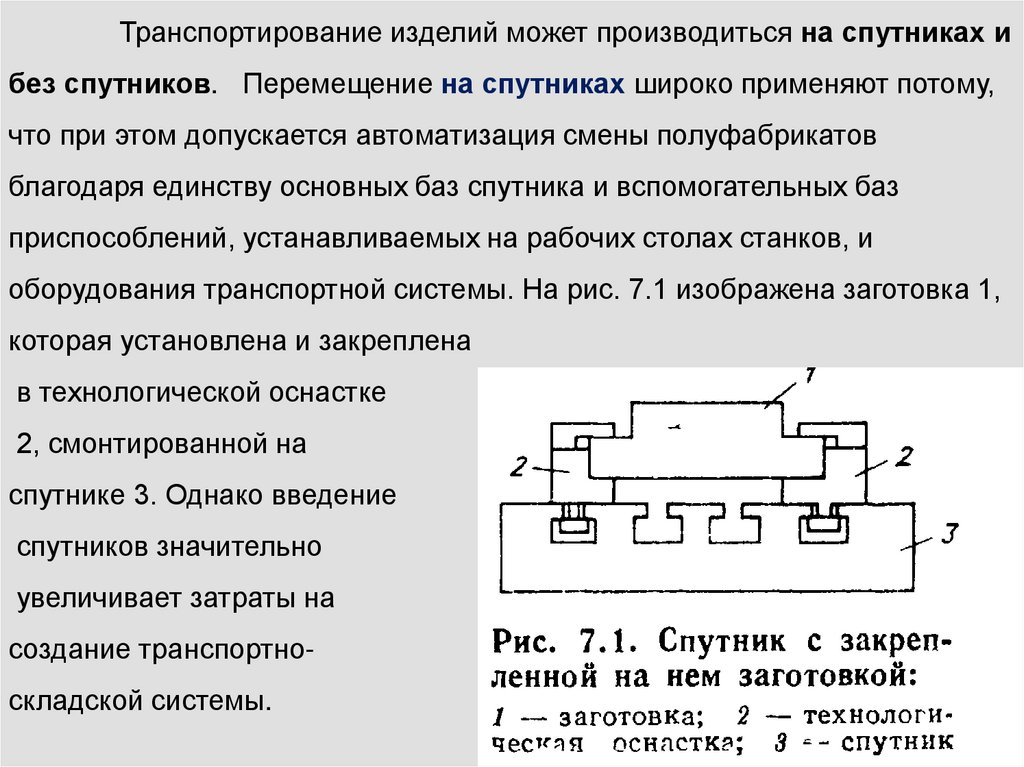
Транспортирование изделий может производиться на спутниках ибез спутников. Перемещение на спутниках широко применяют потому,
что при этом допускается автоматизация смены полуфабрикатов
благодаря единству основных баз спутника и вспомогательных баз
приспособлений, устанавливаемых на рабочих столах станков, и
оборудования транспортной системы. На рис. 7.1 изображена заготовка 1,
которая установлена и закреплена
в технологической оснастке
2, смонтированной на
спутнике 3. Однако введение
спутников значительно
увеличивает затраты на
создание транспортноскладской системы.
11
12.
Способ без спутников в основном используют для деталейтипа тел вращения (валы, втулки, фланцы и т. п.), для которых
характерно, несмотря на различие в размерах, наличие идентичных и
концентрично расположенных поверхностей, которые позволяют
выполнить точное ориентирование и зажим различных заготовок на
оборудовании без дополнительных приспособлений, а также
полуфабрикатов, имеющих достаточную устойчивость при
транспортировании. Для остальных изделий он менее распространен
вследствие высокой стоимости универсальных промышленных
роботов.
12
13.
В механосборочном производстве широкое применениенаходят транспортные системы периодического и непрерывного
действия. Транспортные системы периодического действия
подразделяют на две группы:
транспортные системы с жесткой связью, используемые в
основном в поточном производстве,
транспортные системы с гибкой связью.
Тип транспортной системы выбирают с учетом времени
выполнения технологических операций и условий изготовления
изделий.
13
14.
Рассмотренную классификацию транспортных системиспользуют при проектировании механосборочного производства. Для
каждого типа транспортной системы в настоящее время разработаны
унифицированные элементы, которые позволяют создавать
эффективные и надежные транспортные системы, и только в
отдельных случаях следует создавать специальные транспортные
средства.
Особое внимание при проектировании транспортной системы
следует уделять уровню автоматизации транспортных операций,
который выбирают исходя из экономических соображений. При этом
необходимо учитывать,, что при незначительных капитальных
вложениях в транспортную систему высвобождается значительное
число вспомогательных рабочих.
14
15.
3. Виды транспорта транспортного хозяйствамашиностроительного предприятия
3.1 Подвесной транспорт
Крановое оборудование
К этому виду оборудования относятся мостовые и подвесные краны
грузоподъемностью до 5 т, мостовые краны грузоподъемностью 5…75 т,
монорельсы, краны-штабелеры.
Мостовые опорные краны перемещаются по путям, опорами которых
являются консоли колонн. Они применяются для установки, кантования и
межоперационного транспортирования деталей. Высота подъема
составляет 16…32 м, скорость передвижения 70…120 м/мин. Достоинство
мостовых кранов в том, что они обслуживают всю площадь цеха.
Кран мостовой опорный двухбалочный
16.
Схема мостового крана и кранового пути:1 – колонна; 2 – ригель; 3 – тележка; 4 – мост крана; 5 – крюк;
6 – колесо крана; 7 – подкрановый рельс; 8 – подкрановая балка
16
17.
Кран-балка – тельфер накрановой установке
(облегченный мостовой кран),
грузоподъемность до 5т.
Мостовой кран –
грузоподъемность от 5 до
300 т – для ремонта и
монтажа тяжелого
оборудования
18.
Здание с мостовым краном18
19.
Здание с мостовым краном19
20.
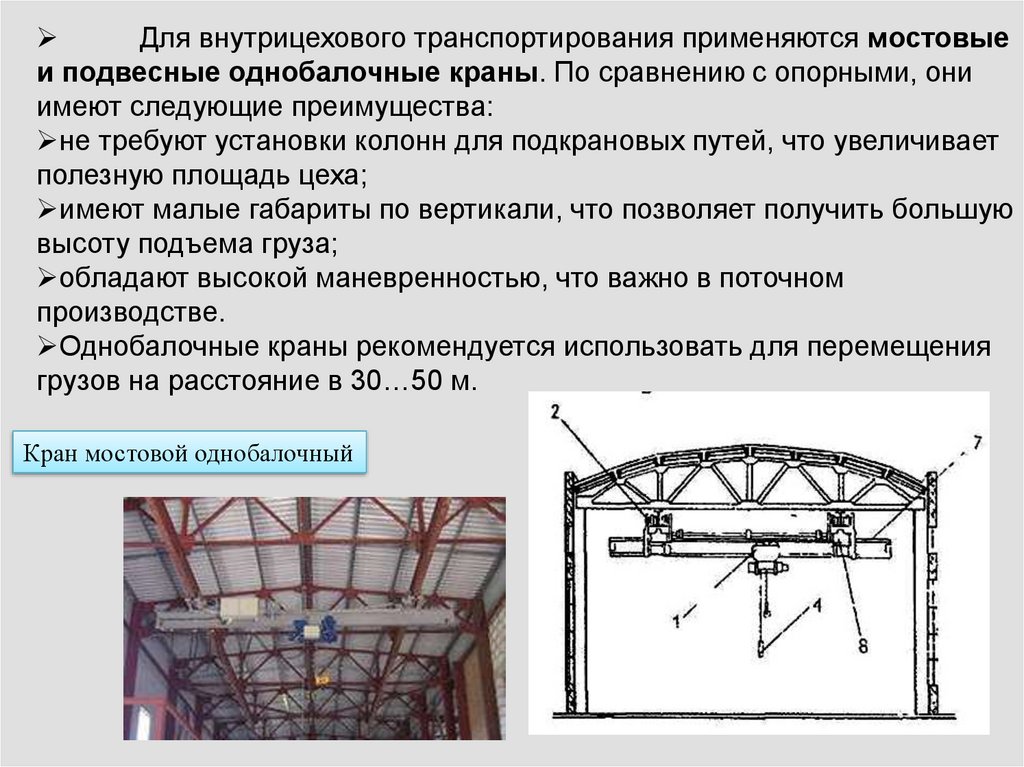
Для внутрицехового транспортирования применяются мостовыеи подвесные однобалочные краны. По сравнению с опорными, они
имеют следующие преимущества:
не требуют установки колонн для подкрановых путей, что увеличивает
полезную площадь цеха;
имеют малые габариты по вертикали, что позволяет получить большую
высоту подъема груза;
обладают высокой маневренностью, что важно в поточном
производстве.
Однобалочные краны рекомендуется использовать для перемещения
грузов на расстояние в 30…50 м.
Кран мостовой однобалочный
21.
Здания с подвесными кранами21
22.
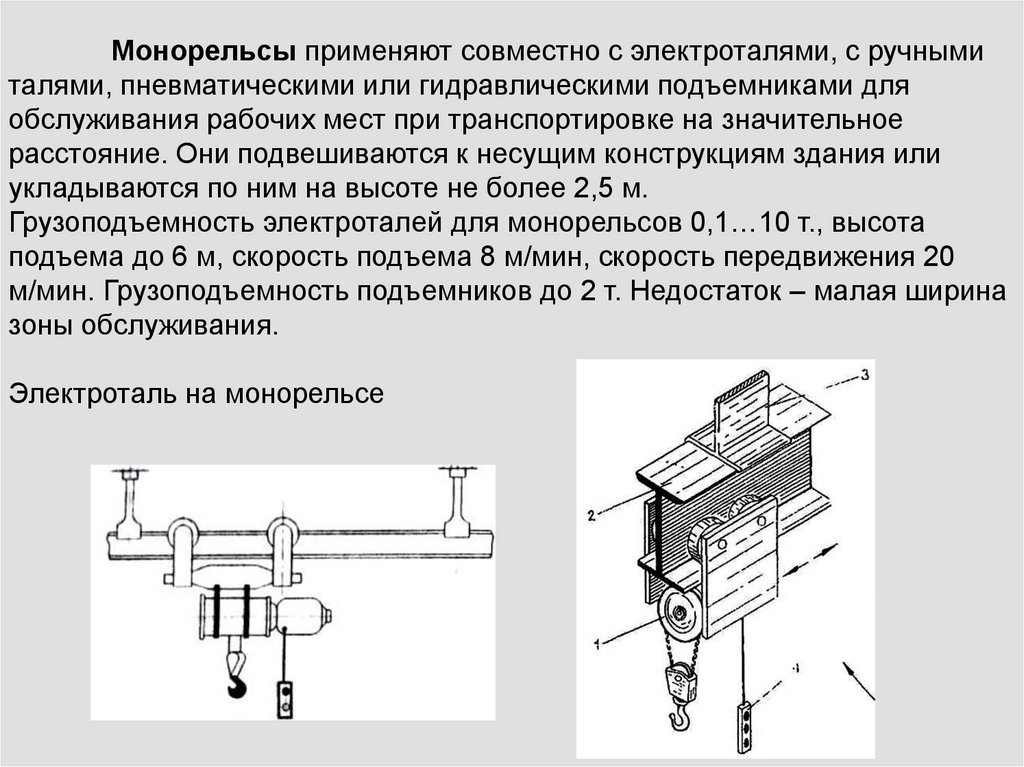
Монорельсы применяют совместно с электроталями, с ручнымиталями, пневматическими или гидравлическими подъемниками для
обслуживания рабочих мест при транспортировке на значительное
расстояние. Они подвешиваются к несущим конструкциям здания или
укладываются по ним на высоте не более 2,5 м.
Грузоподъемность электроталей для монорельсов 0,1…10 т., высота
подъема до 6 м, скорость подъема 8 м/мин, скорость передвижения 20
м/мин. Грузоподъемность подъемников до 2 т. Недостаток – малая ширина
зоны обслуживания.
Электроталь на монорельсе
23.
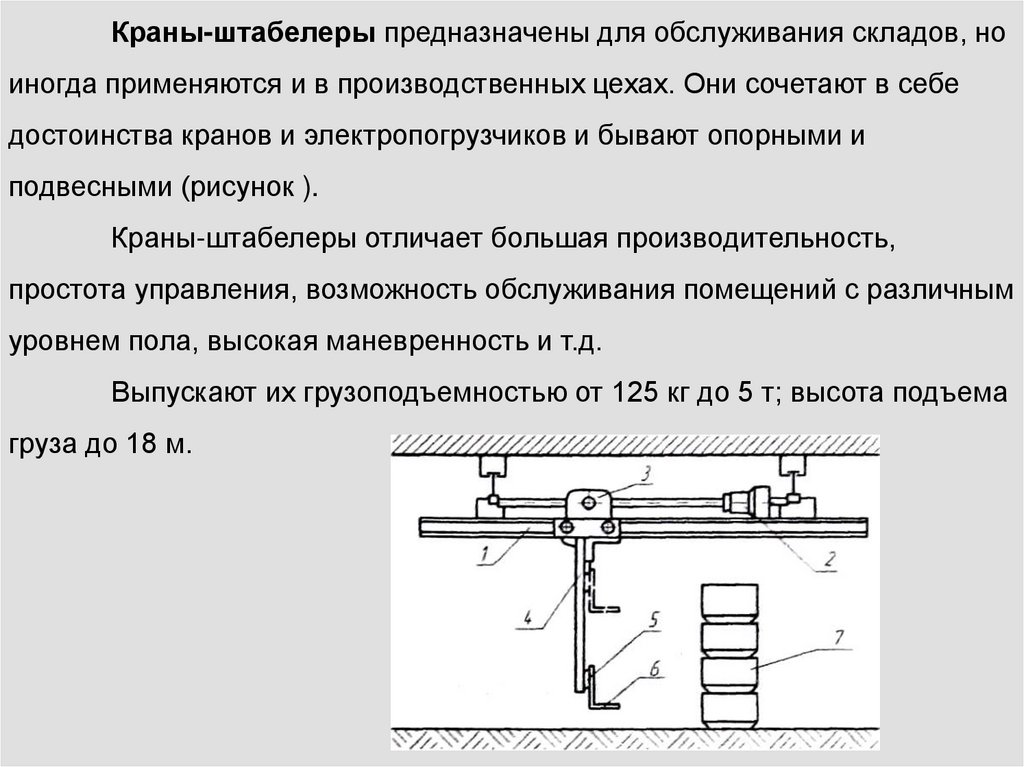
Краны-штабелеры предназначены для обслуживания складов, ноиногда применяются и в производственных цехах. Они сочетают в себе
достоинства кранов и электропогрузчиков и бывают опорными и
подвесными (рисунок ).
Краны-штабелеры отличает большая производительность,
простота управления, возможность обслуживания помещений с различным
уровнем пола, высокая маневренность и т.д.
Выпускают их грузоподъемностью от 125 кг до 5 т; высота подъема
груза до 18 м.
24.
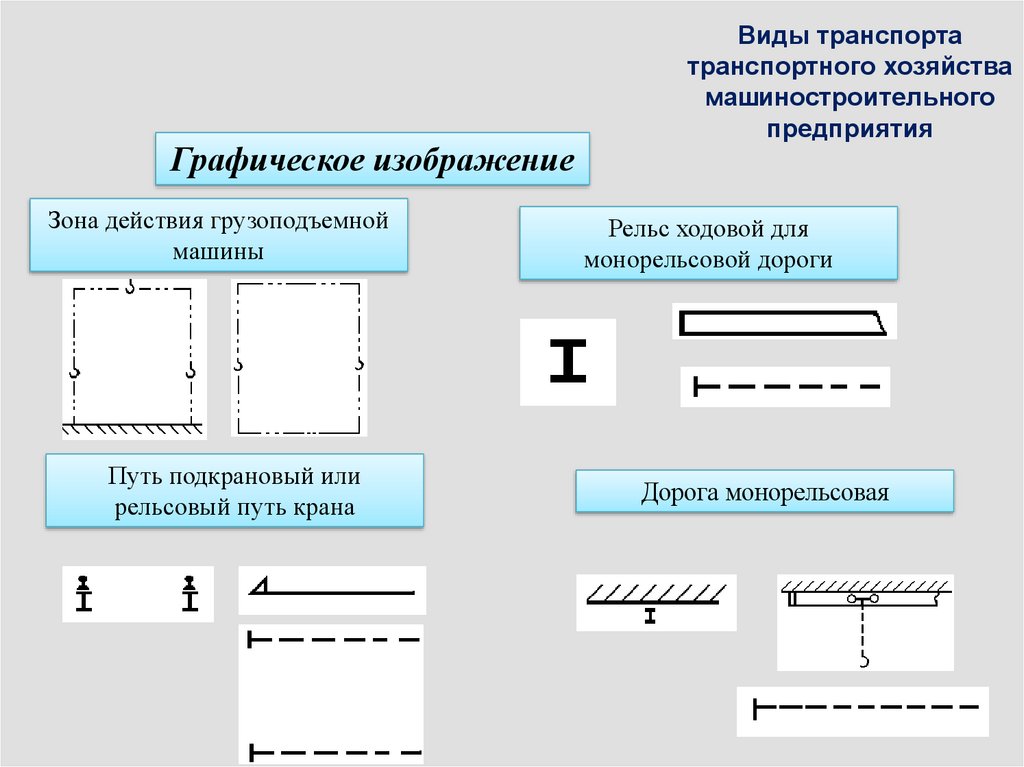
Графическое изображениеЗона действия грузоподъемной
машины
Путь подкрановый или
рельсовый путь крана
Виды транспорта
транспортного хозяйства
машиностроительного
предприятия
Рельс ходовой для
монорельсовой дороги
Дорога монорельсовая
25.
Виды транспортатранспортного хозяйства
машиностроительного
предприятия
Кран однобалочный мостовой
Кран двух-балочный мостовой
26.
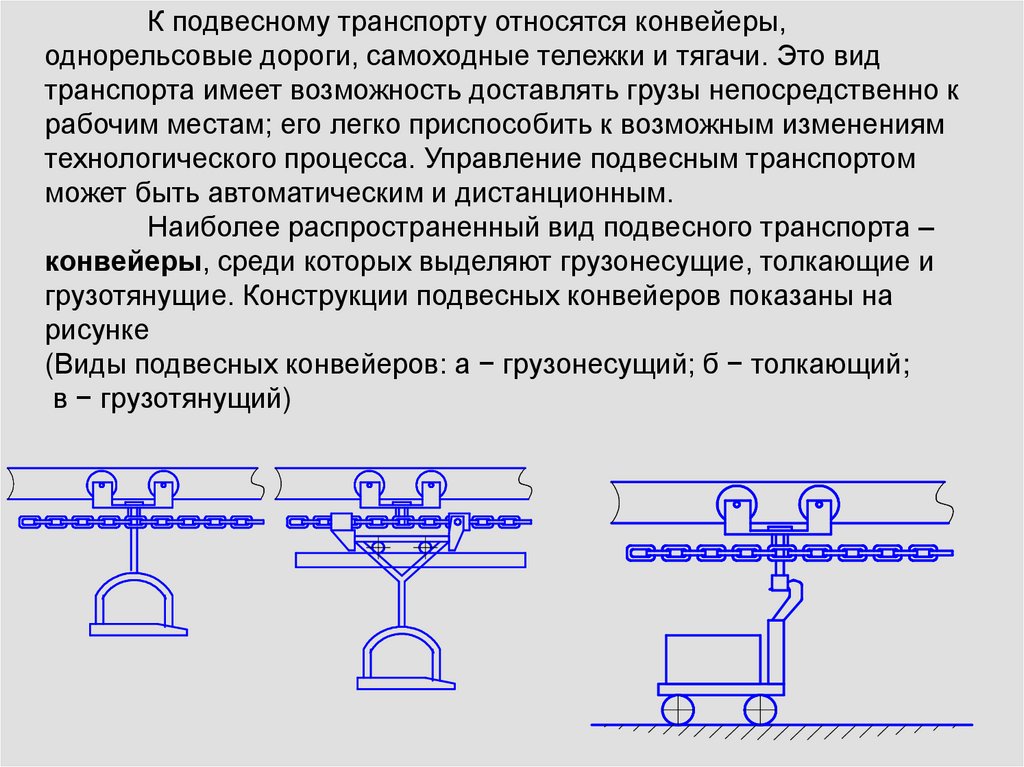
К подвесному транспорту относятся конвейеры,однорельсовые дороги, самоходные тележки и тягачи. Это вид
транспорта имеет возможность доставлять грузы непосредственно к
рабочим местам; его легко приспособить к возможным изменениям
технологического процесса. Управление подвесным транспортом
может быть автоматическим и дистанционным.
Наиболее распространенный вид подвесного транспорта –
конвейеры, среди которых выделяют грузонесущие, толкающие и
грузотянущие. Конструкции подвесных конвейеров показаны на
рисунке
(Виды подвесных конвейеров: а − грузонесущий; б − толкающий;
в − грузотянущий)
27.
Виды транспортатранспортного хозяйства
машиностроительного
предприятия
28.
3.2 Напольное оборудование промышленных зданийНапольной называют транспортную систему, у которой рабочая ветвь
расположена на уровне пола. Транспортную систему, у которой
рабочая ветвь расположена на уровне рук рабочих, называют
эстакадной, а если выше этого уровня, то подвесной.
Грузонесущие транспортные системы имеют одну рабочую
ветвь, а толкающие — две ветви — верхнюю (тяговую) и нижнюю
(грузовую). В результате этого последняя может останавливать
транспортируемый груз в любой момент времени.
Тянущие конвейеры чаще всего используют для сборки
изделий, имеющих собственные колеса.
28
29. Напольное оборудование промышленных зданий
автокаравтопогрузчик;
ленточный транспортер
козловый кран
вагон
рольганг
30. Типы напольно-тележечного транспорта
НаименованиеГрузоподъемность, т
Скорость передвижения,
км/ч
Межкорпусные перевозки
Автопогрузчики
Электропогрузчики
Электротягачи
Электротележки
Тракторы с прицепными
1…5
15…40
0,25…3
6…10
тяг. усилие 2,5…8 кН
7…12
0,5…5
7…15
2…5
20
тележками
Внутрицеховые, межцеховые и внутрикорпусные перевозки
Электропогрузчики
0,25…3
6…10
Электротележки
0,5…5
7…15
Электроштабелеры
0,1…2
3…7
0,3…1,25
–
Ручные тележки
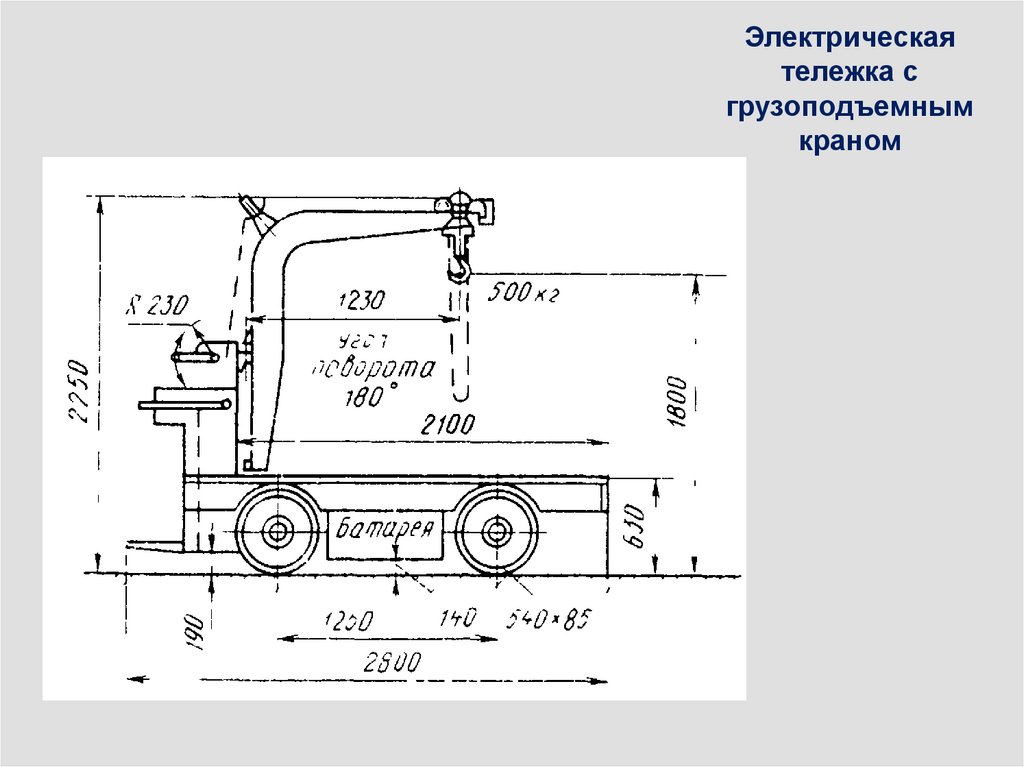
31.
Электрическаятележка с
грузоподъемным
краном
32.
Электропоезд безводителя
33. Напольное оборудование промышленных зданий
Для перемещения грузов вГПС широко используют кареткиоператоры (рис. ). Шасси тележки
представляет собой сварную силовую
раму 11, на кронштейнах которой
смонтированы две оси с четырьмя
ходовыми колесами 12. С одной
стороны рамы установлен подвижной
бампер 13, который в случае наезда
тележки на посторонние предметы
включает систему торможения и
останова.
Привод перемещения каретки-оператора состоит из электродвигателя
постоянного тока 2, редуктора 7, на выходном валу которого установлено зубчатое
колесо, находящееся в зацеплении с шестерней, расположенной на ведущей оси
ходовых колес. Платформа установки спутников представляет собой плиту 3, на
которой установлены направляющие планки с роликами 4 для базирования спутника и
защелка, предохраняющая спутник от смещения при движении тележки. Привод подачи
спутника 5 обеспечивает его перемещение с платформы тележки по направляющим
планкам к агрегату загрузки спутников либо к ячейке оперативного накопителя. Блок
электроавтоматики установлен на стойке 6 шасси тележки, к нему относятся
чувствительные элементы 9 систем торможения и точного останова каретки- оператора.
Механизм 10 фиксации каретки-оператора состоит из электропривода и фиксатора,
который входит в отверстия в колодках, расположенных в пунктах останова тележки.
34.
Напольные конвейерыЭтот вид транспорта широко распространен в поточном
производстве для передачи деталей и узлов от одного рабочего
места к другому.
Существует несколько типов напольных конвейеров. В
машиностроении наиболее часто применяются роликовые,
пластинчатые, ленточные конвейеры.
Шаговый конвейер
35. 4. Схема транспортных связей и технологический процесс транспортирования
Этапы построения схемы материальных потоков:1. За основу проектирования транспортной системы принимают
схему материальных связей машиностроительного производства,
на которой указывают грузопотоки между основным
оборудованием, накопителями, производственными
подразделениями.
35
36.
2.Необходимо выявить потребность в основных и
вспомогательных материалах, заготовках, полуфабрикатах и
изделиях в тоннах на всю программу выпуска для каждого
производственного участка, а также программу выпуска
полуфабрикатов, готовых изделий в тоннах с каждого
производственного участка.
3.
Схема материальных потоков служит базой для разработки
технологических процессов транспортных работ, а также выбора
вида, числа и основных технических параметров средств
транспортирования. При проектировании выполняют несколько
вариантов схем материальных потоков и выбирают оптимальный.
36
37. Показатели работы транспортного хозяйства:
Грузооборот - количество грузов (в тоннах),поступающих на предприятие, а также перевезенных за
пределы и в пределах самого предприятия за
определенный период времени (смена, сутки, месяц, год).
Qc = К Qпл / Ф,
где: Qc – суточный грузооборот, т / км;
К – коэффициент неравномерности, равен 1…2,5;
Qпл - грузооборот в плановом периоде, т/км;
Ф – плановый фонд времени, дни.
По грузообороту определяют количество транспортных средств
38.
Для определения грузооборота по цеху необходимо выявитьпотребность в основных и вспомогательных материалах, заготовках,
полуфабрикатах и изделиях в тоннах на всю программу выпуска для
каждого производственного участка, а также программу выпуска
полуфабрикатов, готовых изделий в тоннах с каждого производственного
участка. Если транспортная система должна доставлять на
производственные участки инструмент, технологическую оснастку, то при
определении общего грузопотока необходимо будет учитывать и их массу.
Величина грузооборота подсчитывается на основании
«шахматной» ведомости или таблиц, отражающей все перевозки между
отдельными цехами и складами, а также внешний грузооборот завода.
Пример шахматной ведомости грузооборота завода показан в табл.
(числовые значения в таблице шт, на практике они могут даваться в массе,
штуках или в объеме перемещаемых грузов.
38
39. Шахматная ведомость грузооборота (пример)
Пунктыотправления
грузов
Пункты получения грузов
Склад
комплектующ
их
Склад
комплектующих
Механическ
ий цех 1
Механическ
ий цех 2
Сборочный цех
13 т
15 шт
7т
7т
Механический цех 1
13 т
15 шт
Механический цех 2
7т
7т
Сборочный цех
3т
20 шт
3т
Всего
Склад
готовых
изделий
т
шт
3т
20 шт
23
35
3т
23
15
1т
15
1т
Склад готовых
изделий
Всего
20 шт
7
20 шт
т
23
23
шт
35
15
15
20
7
40
40
68
20
110
40.
Грузопоток - количество груза, перемещаемого по одному направлению,от одного пункта к другому за какой-либо период времени (сутки, месяц,
квартал, год).
Грузопотоки наносят на компоновки в виде полос, ширина которых
пропорциональна их значению (т/сут или т/год), указываемой на каждом
грузопотоке цифрами. Для большей наглядности грузопотоки изображают
штриховкой (или краской) различного цвета, соответствующей тому или
иному роду груза; направление грузопотоков, которое должно
соответствовать фактической трассе движения грузов, указывают
стрелками в местах входа и выхода, а при большом числе грузопотоков
также на всем их протяжении.
40
41.
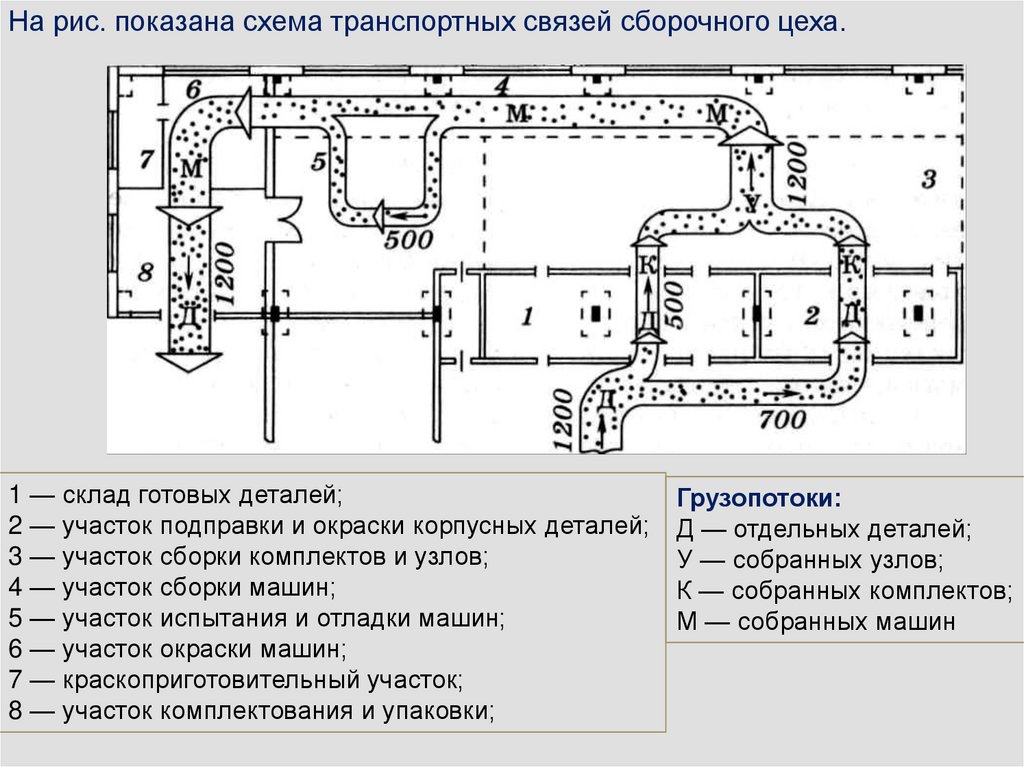
На рис. показана схема транспортных связей сборочного цеха.1 — склад готовых деталей;
2 — участок подправки и окраски корпусных деталей;
3 — участок сборки комплектов и узлов;
4 — участок сборки машин;
5 — участок испытания и отладки машин;
6 — участок окраски машин;
7 — краскоприготовительный участок;
8 — участок комплектования и упаковки;
Грузопотоки:
Д — отдельных деталей;
У — собранных узлов;
К — собранных комплектов;
М — собранных машин
42.
Схема грузопотоков служит базой для разработкитехнологических процессов транспортных работ, а также выбора вида,
числа и основных технических параметров средств транспортирования.
При проектировании выполняют несколько вариантов схем грузопотоков и
выбирают оптимальный.
Оптимальная транспортно-технологическая схема должна обеспечивать:
минимальное число действительно необходимых операций;
минимальные расстояния транспортирования и число перевалок
грузов;
автоматизацию каждой операции и всего процесса
транспортирования;
максимально возможное совмещение подъемно-транспортных
операций с операциями изготовления изделий;
использование для автоматизации процессов прогрессивных
высокопроизводительных средств;
однотипность средств автоматизации процессов транспортирования;
малое число пересечений и разветвлений;
требования охраны труда;
экономическую эффективность и ремонтопригодность.
42
43. Внутризаводская система перевозки грузов
44. Внутризаводская система перевозки грузов
По грузообороту и грузовым потокам устанавливают структурупарка транспортных и подъемно-транспортных машин и размеры
погрузочно-разгрузочных фронтов.
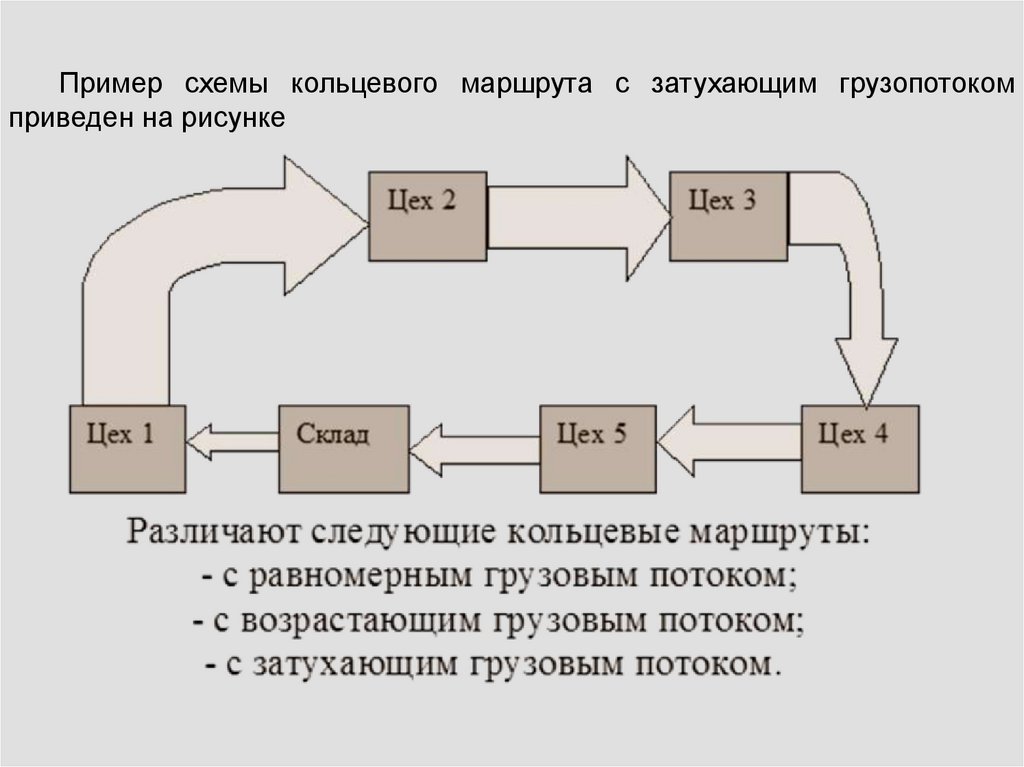
Различают
следующие
внутризаводские
транспортировки грузов:
– маятниковые
• односторонние
• двухсторонние
• Веерные
– кольцевые
• с равномерным грузовым потоком
• с возрастающим грузовым потоком
• с затухающим грузовым потоком
– системы по принципу “такси”.
системы
45.
Примеры схем маятниковойпредставлены на рисунке.
системы
маршрутных
перевозок
46.
Пример схемы кольцевого маршрута с затухающим грузопотокомприведен на рисунке
47. Схемы межоперационных транспортных связей в автоматизированном непоточном производстве
Прямолинейная(неветвящаяся)
Замкнутая
Замкнутая-разветвленная
47
48.
5. Разработка технологического процесса транспортированияПосле составления транспортных связей производственного
процесса переходят к разработке технологического процесса
транспортирования. Под технологическим процессом транспортирования
понимают части производственного процесса, во время которых
происходит изменение пространственного положения объекта
производства (материал, заготовка, полуфабрикат, изделие) без
изменения его качества. Технологический процесс транспортирования
состоит из ряда операций, выполняемых в определенной
последовательности. Это, например, погрузка, транспортирование,
разгрузка, перегрузка, перекладка, кантование и загрузка. По возможности
стараются использовать типовые технологические процессы, которые
разрабатывают для группы материалов, заготовок, полуфабрикатов,
изделий, имеющей общность маршрута перемещения, состава
транспортных партий, условий захвата грузовых единиц, структуры стыков
между технологическими, контрольно-учетными, складскими операциями и
операциями перемещения, последовательности выполнения операций
перемещения. Обычно разрабатывают маршрутные и операционные
карты технологического процесса транспортирования, на основе которых
определяют время транспортирования для выбранного типажа
транспортного оборудования.
48
49.
50.
51. Блок-схема выбора оптимальной транспортной системы с учетом габаритных и массовых характеристик грузов, а также
производственнойпрограммы и состава
производственного
оборудования приведена
на рисунке
52. Основные направления при проектировании транспортной системы
Основной задачей при проектировании транспортной системыявляется сокращение объема подъемно-транспортных операций и
снижение трудозатрат при заданном объеме работ.
При проектировании технологического процесса объем
подъемно-транспортных операций может быть уменьшен путем
выбора рациональной формы заготовок, приближающейся к форме
готовой детали, что приводит к сокращению массы перемещаемых
грузов.
52
53.
Сокращение мощности грузопотока может быть достигнуто наэтапе формирования производственных участков и принятия
компоновочного решения. Например, размещение склада
полуфабрикатов в механосборочных корпусах не только сокращает
транспортные пути, но и улучшает эксплуатацию транспорта.
Желательно также сократить вертикальные перемещения грузов при
транспортировании путем соблюдения постоянства высоты
приемосдаточных секций и уровня пола, что особенно важно при
использовании колесного напольного транспорта. Все полуфабрикаты
должны транспортироваться в производственной таре, и не
допускается сгружать их на пол или поднимать с пола вручную.
53
54.
Применение однотипных автоматизированных транспортныхсредств на производственных участках и между ними (подвесные
толкающие конвейеры, самоходный тележечный транспорт с
управлением от ЭВМ, робокары, роликовые конвейеры с
принудительным вращением и перегрузочными устройствами,
подвесные краны-операторы с дистанционным управлением и т. д.)
позволяет резко сократить трудоемкость и повысить эффективность
транспортирования. Однотипными транспортными средствами проще
управлять и проще обслуживать их.
54
55.
Типизация технологических процессов транспортированияпозволяет применить наиболее эффективные процессы и установить
наиболее рациональный типаж оборудования и оснастки, упорядочить
разработку технологических процессов транспортирования, а также
сократить сроки доставки на технологическое оборудование
необходимых материалов, заготовок, полуфабрикатов и изделий.
Для автоматизации загрузки и разгрузки технологического
оборудования, а также стыковки технологического оборудования с
транспортной системой следует использовать промышленные роботы
и автоматические стыкующие устройства.
Значительная эффективность работы транспортной системы
может быть достигнута благодаря увеличению транспортной партии
путем использования контейнерной перевозки грузов.
55
56. Основные направления совершенствования транспортного хозяйства на предприятиях :
механизация и автоматизация транспортных операций в сочетаниис высокой их организацией;
применение унифицированной тары (в том числе и оборотной);
внедрение единой производственно-транспортной (комплексной)
технологии;
специализация средств межцехового транспорта по роду
перевозимых грузов;
организация контейнерных перевозок;
внедрение автоматизированных систем управления транспортом.
57. Требования, предъявляемые к оптимальной транспортно-технологической схеме:
минимальное число действительно необходимых операций,минимальные расстояния транспортирования и число
транспортных перемещений грузов;
автоматизация каждой операции и всего процесса
транспортирования;
максимально возможное совмещение транспортных
операций с операциями изготовления изделий;
использование для автоматизации процессов прогрессивных
высокопроизводительных средств, однотипность средств
автоматизации процессов транспортирования ;
малое число пересечений и разветвлений;
требования охраны труда;
экономическая эффективность и ремонтопригодность.