







 electronics
electronicsSimilar presentations:







")


Электрические машины постоянного тока. Лекция 12
1. БГТУ «ВОЕНМЕХ» им. Д.Ф. Устинова кафедра электротехники, О8
Лекция 12Электрические машины постоянного тока
1
2.
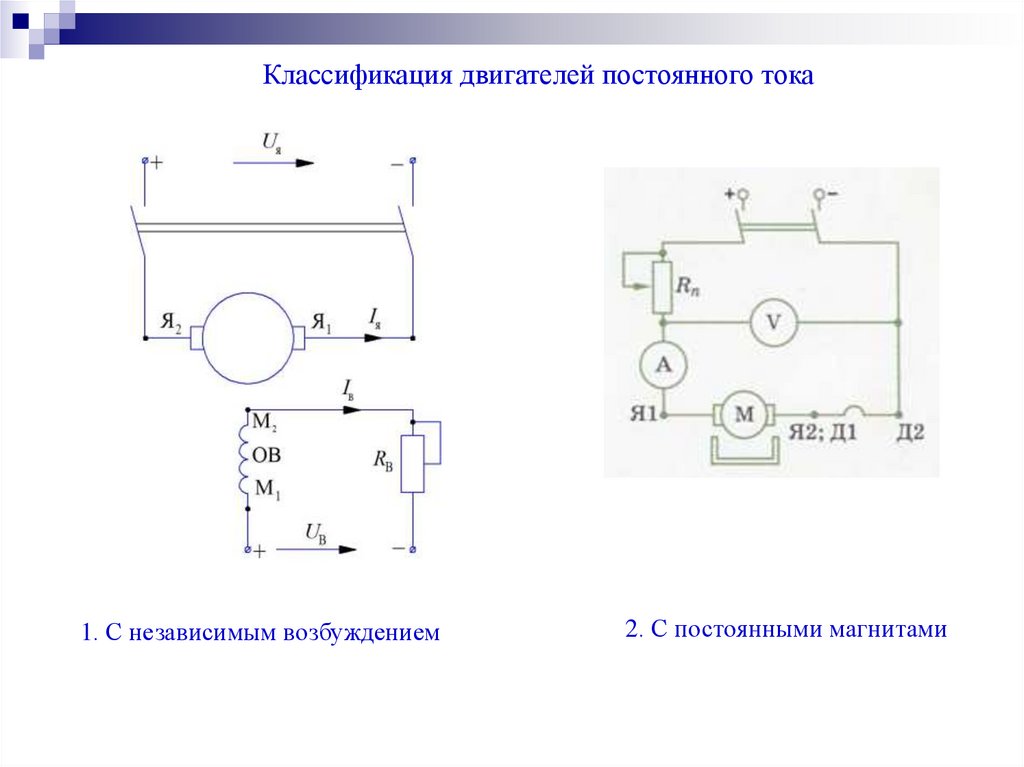
Классификация двигателей постоянного тока1. С независимым возбуждением
2. С постоянными магнитами
3.
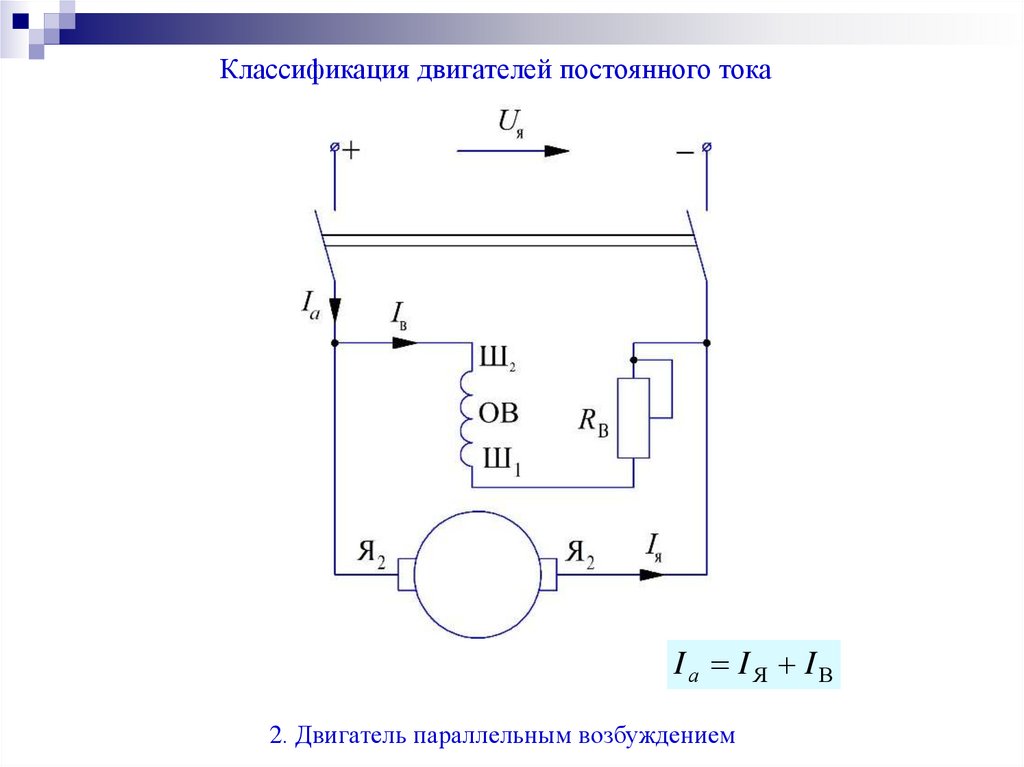
Классификация двигателей постоянного токаIа IЯ IВ
2. Двигатель параллельным возбуждением
4.
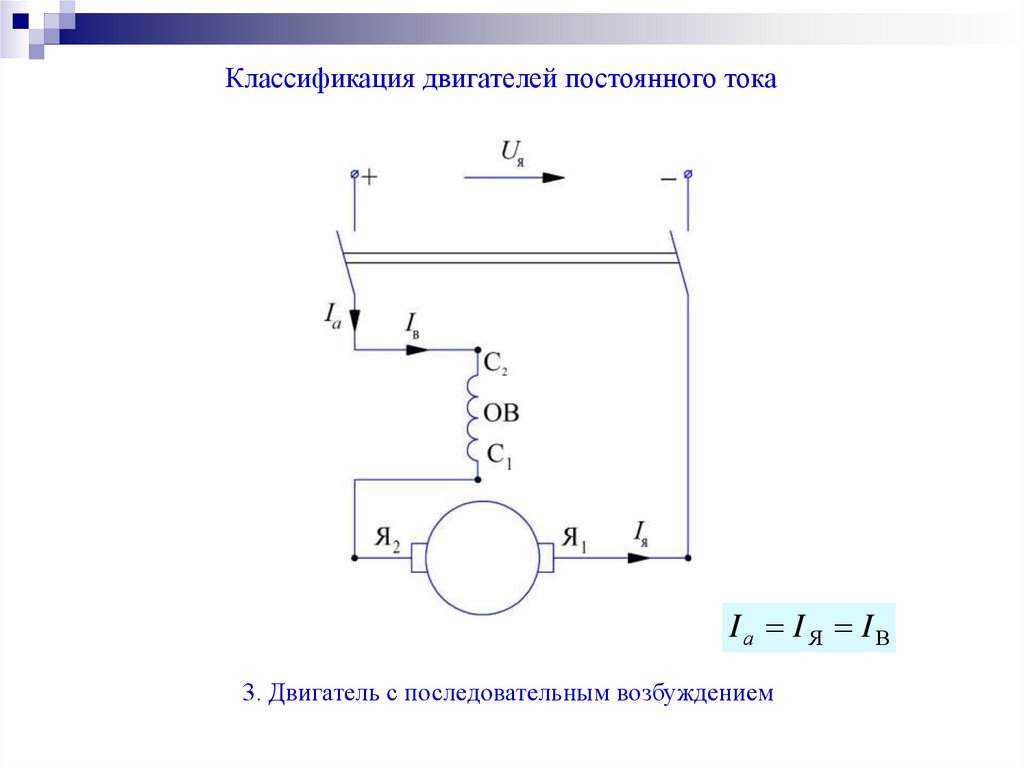
Классификация двигателей постоянного токаIа IЯ IВ
3. Двигатель с последовательным возбуждением
5.
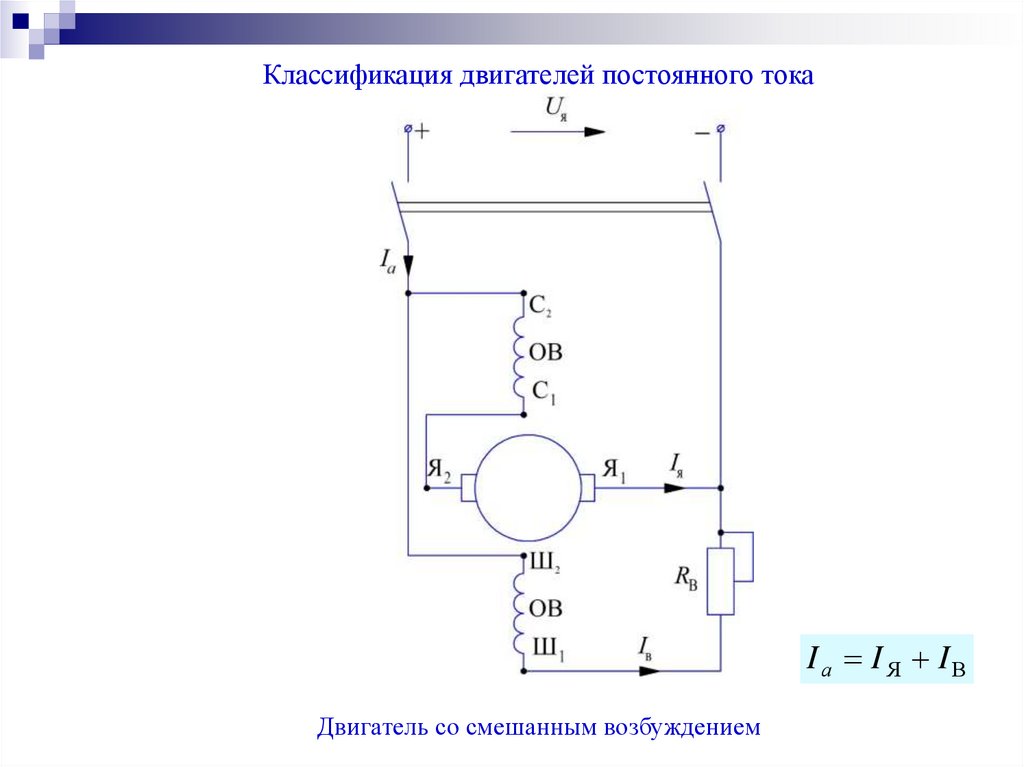
Классификация двигателей постоянного токаIа IЯ IВ
Двигатель со смешанным возбуждением
6.
Рабочие и механические характеристики двигателей постоянного токаМеханической характеристикой ДПТ называют зависимость скорости
вращения якоря от момента на валу при постоянном значении напряжения
якоря и тока возбуждения (n=f(M), при Uя=const и Iв =const) .
Рабочие характеристики ДПТ - зависимости скорости вращения якоря n,
тока Ia, мощности P1, развиваемого электромагнитного момента M и КПД от
механической мощности на валу двигателя P2 (n=f(P2), Ia =f(P2), Pa =f(P2),
M =f(P2), =f(P2) при Uя=const и Iв =const) .
Из формулы для момента можем найти зависимость тока якоря от момента:
M Cм Ф I Я
M
IЯ
CМ Ф
Вывод: Тока якоря двигателя зависит только от момента на валу.
7.
Рабочие и механические характеристики двигателей постоянного токаЧастоту вращения якоря найдем из второго закона Кирхгофа.
U Я C e Ф n I Я RЯ
U Я I Я RЯ
n
Ce Ф
С учётом зависимости тока якоря от момента
M Cм Ф I Я
IЯ
M
Cм Ф
M
UЯ
RЯ
CМ Ф
UЯ
М RЯ
RЯ
n
n0
M
2
2
Ce Ф
Ce Ф Ce C М Ф
Ce C М Ф
UЯ
- скорость холостого хода.
n0
Ce Ф
8.
Рабочие и механические характеристики двигателей постоянного токаПолезная мощность на валу двигателя тоже зависит от момента на валу
P2 M 2 f M
P2
M
2 f
Из приведенных уравнений видно, что все рабочие характеристике зависят
от момента на валу и магнитного потока.
Двигатели постоянного тока обладают саморегулированием, т.е. изменение
момента на валу переведет изменению скорости и тока якоря которые
обеспечивают устойчивый режим работы.
9.
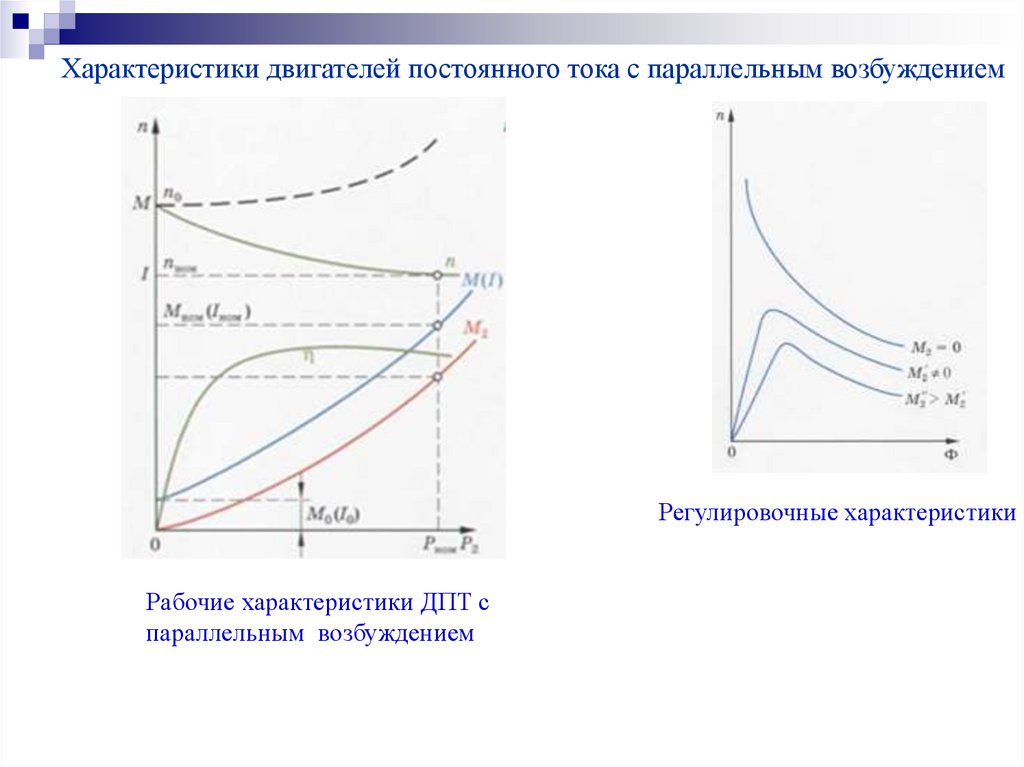
Характеристики двигателей постоянного тока с параллельным возбуждениемРегулировочные характеристики
Рабочие характеристики ДПТ с
параллельным возбуждением
10.
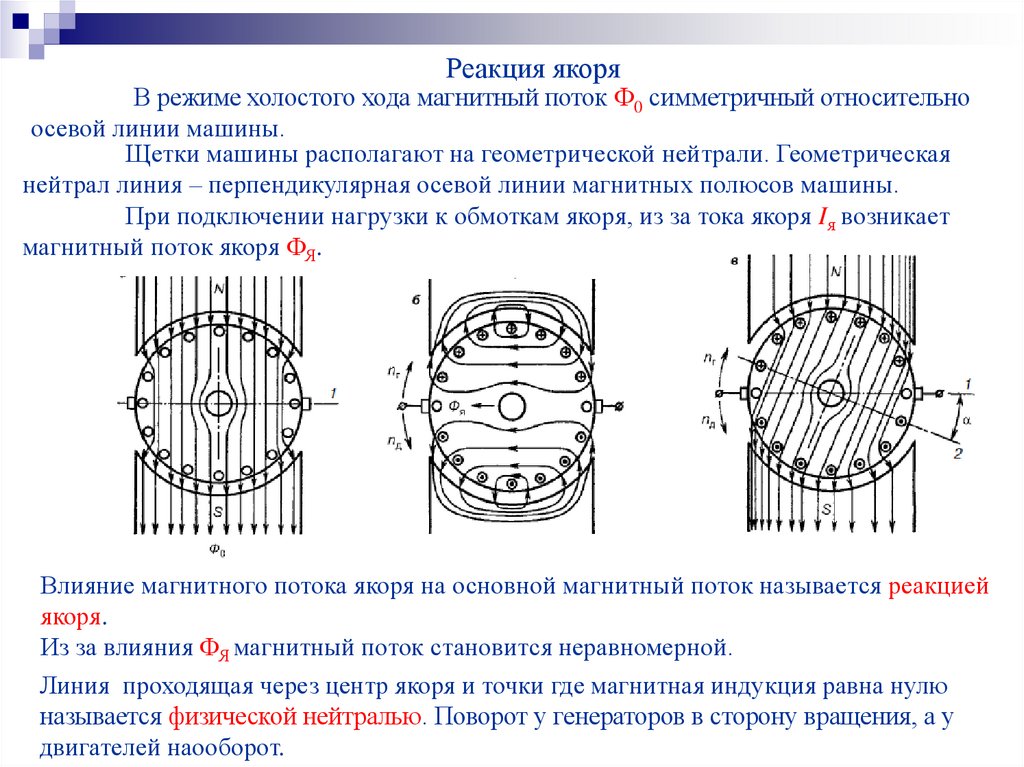
Реакция якоряВ режиме холостого хода магнитный поток Ф0 симметричный относительно
осевой линии машины.
Щетки машины располагают на геометрической нейтрали. Геометрическая
нейтрал линия – перпендикулярная осевой линии магнитных полюсов машины.
При подключении нагрузки к обмоткам якоря, из за тока якоря Iя возникает
магнитный поток якоря ФЯ.
Влияние магнитного потока якоря на основной магнитный поток называется реакцией
якоря.
Из за влияния ФЯ магнитный поток становится неравномерной.
Линия проходящая через центр якоря и точки где магнитная индукция равна нулю
называется физической нейтралью. Поворот у генераторов в сторону вращения, а у
двигателей наооборот.
11.
Пуск двигателей постоянного токаВ момент пуска двигателей скорость n=0 об/мин. ЭДС якоря E=CеФn=0.
Следовательно пусковой ток якоря определяется:
I Я.п
UЯ
RЯ
Пусковой ток якоря во много раз больше номинального тока
I Я.п (10 20) I Я.ном
Резкое увеличение пускового тока является аварийным режимом. Поэтому необходимо
его ограничение.
Существуют следующие способы ограничения пускового тока:
1. пуск двигателя при пониженном значении напряжения якоря (безреостатный);
2. увеличение сопротивления цепи якоря при пуске (реостатный);
3. регулирование тока якоря электронными ключами.
12.
Реостатный пуск двигателей постоянного токаПри реостатном пуске двигателя пусковой ток якоря определяется выражением:
I Я.п
UЯ
RЯ RП
Сопротивление пускового реостата Rп таким образом,
чтобы
I Я.п (1,5 2,0) I Я.ном
По мере разгона машины ток якоря уменьшается
U Я E U Я C e Фn
IЯ
RЯ RП
RЯ RП
Поэтому сопротивление постепенно уменьшает до 0.
В момент пуска, ток в обмотке возбуждения имеет максимальное значение,
т.е магнитный поток Ф0 максимальный!
13.
Способы регулирования скорости ДПТU Я I Я RЯ
n
Ce Ф
Скорость вращения зависит от напряжения питания Uя, тока якоря Iя и
магнитного потока Ф.
Существуют следующие способы:
1. изменять напряжение питания Uя при неизменном Rя и магнитного потока Ф;
2. изменять магнитный поток Ф при неизменном Uя при неизменном Rя ;
3. Изменять сопротивление Rя при неизменном Uя магнитного потока Ф.
n
n0
Uя1 > Uя.ном
Uя.ном
Uя2 < Uя.ном
M
14.
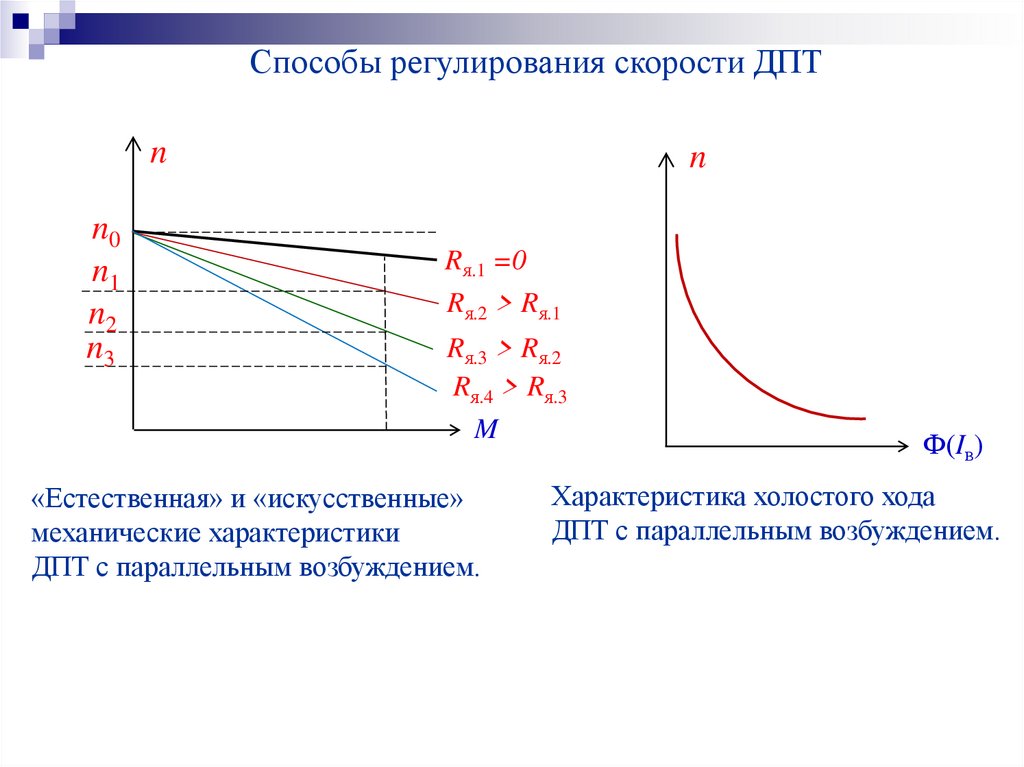
Способы регулирования скорости ДПТn
n0
n1
n2
n3
n
Rя.1 =0
Rя.2 > Rя.1
Rя.3 > Rя.2
Rя.4 > Rя.3
M
«Естественная» и «искусственные»
механические характеристики
ДПТ с параллельным возбуждением.
Ф(Iв)
Характеристика холостого хода
ДПТ с параллельным возбуждением.
15.
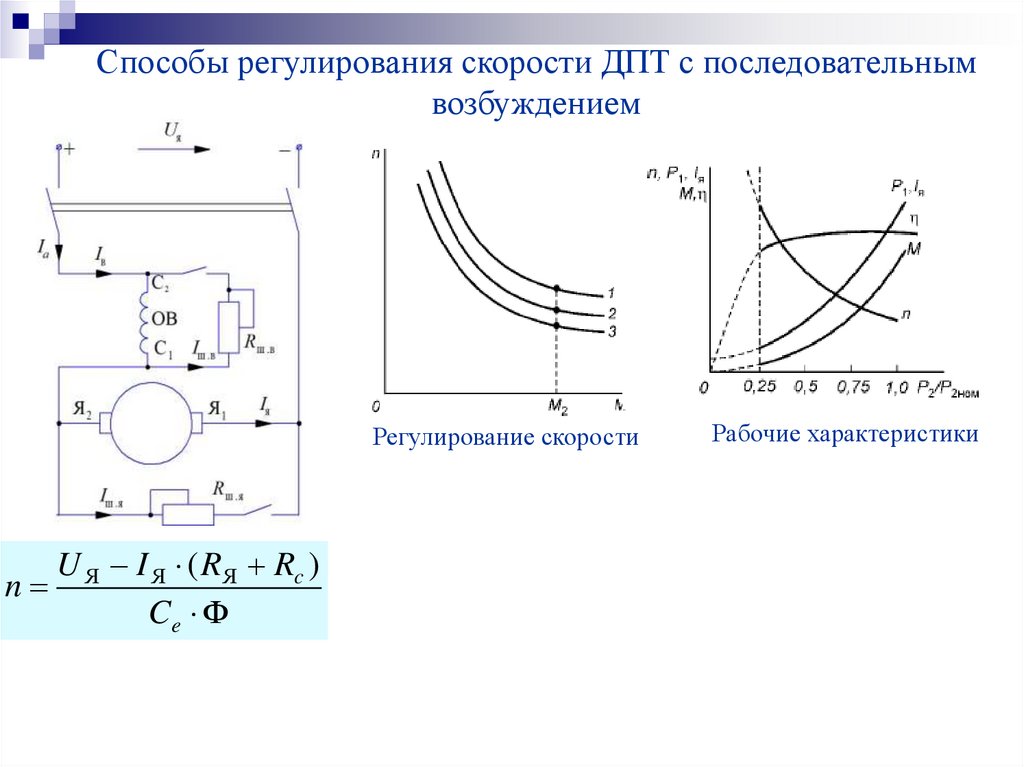
Способы регулирования скорости ДПТ с последовательнымвозбуждением
Регулирование скорости
U Я I Я ( RЯ Rc )
n
Ce Ф
Рабочие характеристики
16.
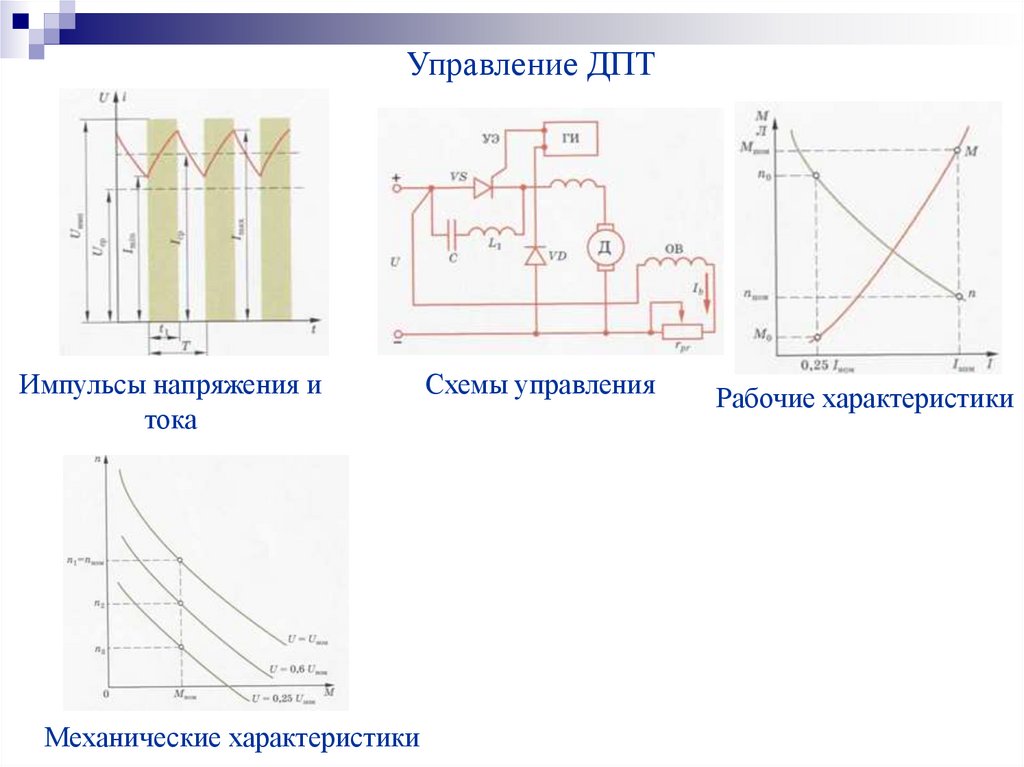
Управление ДПТИмпульсы напряжения и
тока
Механические характеристики
Схемы управления
Рабочие характеристики
17.
Универсальный коллекторный двигательОднофазный коллекторный двигатель
18.
Основные уравненияТок якоря
i (t ) I m sin( t )
Магнитодвижущая сила
F (t ) w i (t ) w I m sin( t )
Магнитный поток
Ф(t ) Фm sin( t )
Вращающий момент
m(t ) C М Фm sin( t ) I m sin( t )
M ср
T
1 C М Фm sin( t ) I m sin( t )dt
T 0 C М I Фm sin( )
cos( ) 0,7 0,95