










 и схемы ее подключения относительно обмотки якоря (ОЯ) получаются следующие")








; б – Ф или U якоря (последовательное возбуждение); в – U якоря (независимое возбуждение)")

, генераторное (рекуперативное -в), противовключением")







 – ΔUпн – изменение напряжения ГПТ при изменении нагрузки от номинальной до 0. б) – 1 – ГПТ с независимым возбуждением; 2 – с")
 electronics
electronicsSimilar presentations:





")


")

Машины постоянного тока
1.
2.
Электрические машины постоянного тока по своему назначению делятся нагенераторы, преобразующие механическую энергию в электрическую при
постоянном напряжении (источники электрической энергии) и двигатели,
преобразующие электрическую энергию постоянного тока в механическую энергию.
Механическая энергия используется для приведения во вращение
исполнительных механизмов (станок, лебедка, и т.д.).
Электрические машины подразделяются на следующие группы по мощности:
– микромашины, мощностью от долей ватта до 500 Вт;
– машины малой мощности – 0,5…10 кВт;
– машины средней мощности – от 10 до нескольких сотен кВт;
– машины большой мощности – свыше нескольких сотен кВт.
Большое применение находят машины постоянного тока мощностью до 200 кВт
на напряжение 110…440 В с частотой вращения 550…2870 об/мин.
Микромашины имеют частоты вращения от нескольких оборотов до 30 000 об/мин.
Двигатели постоянного тока (ДПТ) допускают плавное регулирование частоты
вращения и способны развивать большой пусковой момент, благодаря чему они
нашли широкое применение на электротранспорте и для привода технологического
оборудования.
Генераторы постоянного тока (ГПТ) используются для питания электролизных и
гальванических ванн, электроснабжения потребителей на транспорте, в системах автоматики
для привода механизмов и в качестве датчиков частоты вращения. Серьезным недостатком
машин постоянного тока является наличие щеточно-коллекторного узла, требующего ухода и
снижающего надежность работы
3.
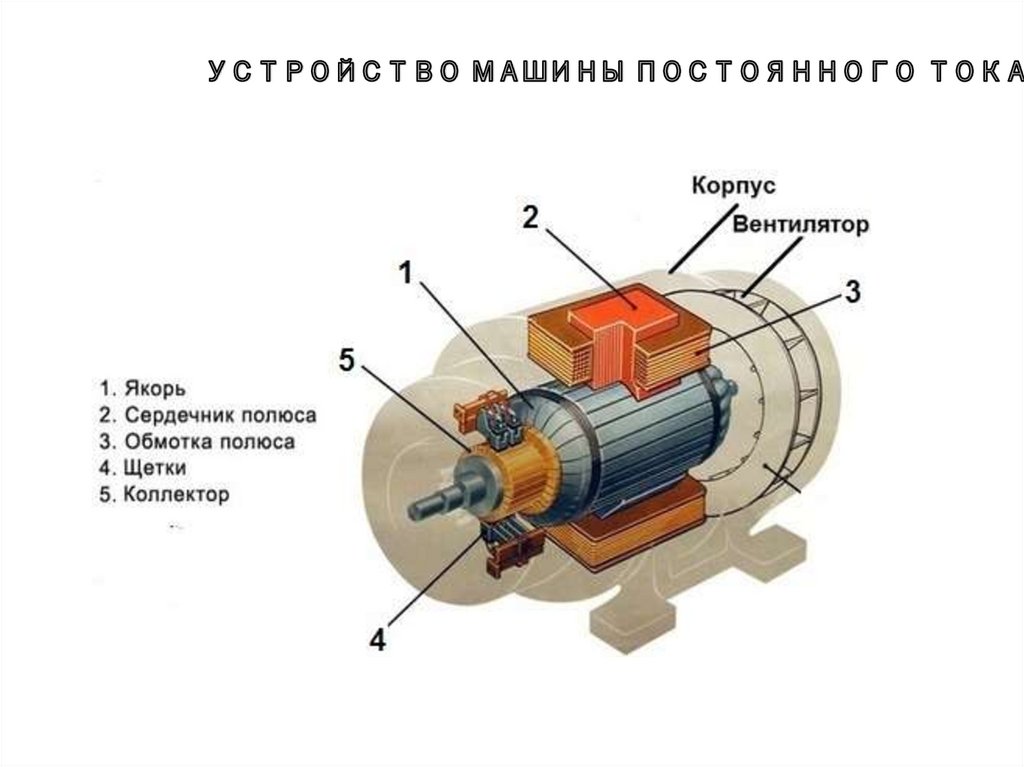
4. 1 – подшипниковый щит; 2 – подшипник; 3 – вентилятор; 4 – якорь; 5 – коллектор; 7 – главный и дополнительный полюсы; 8 –
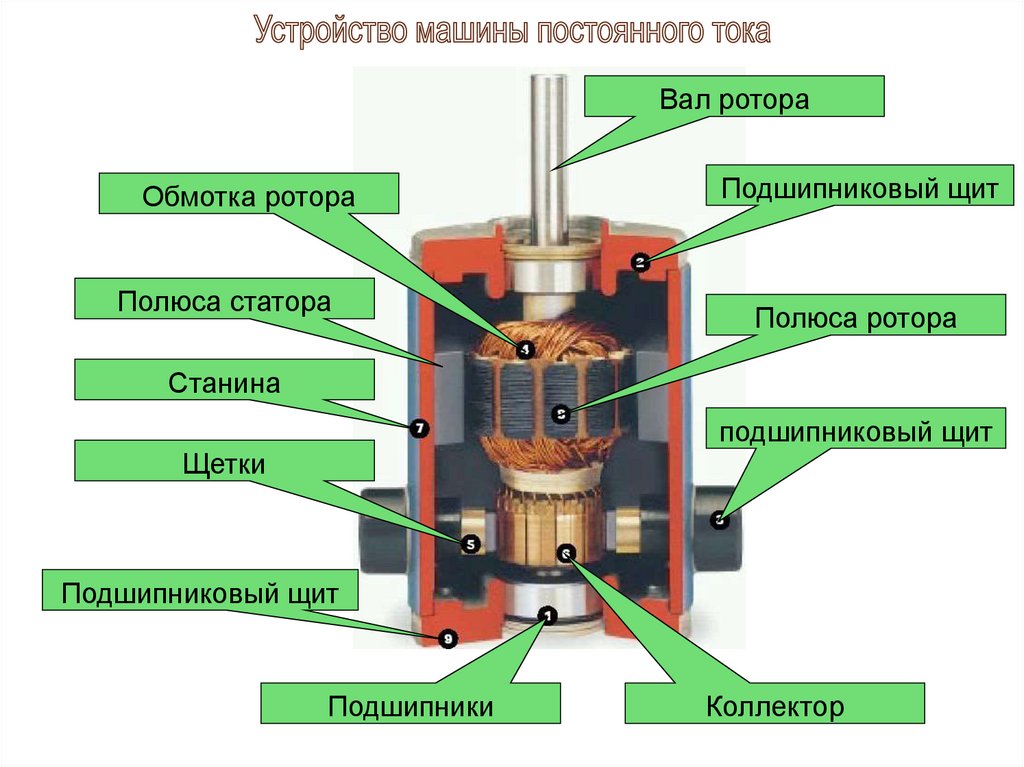
Устройство машины постоянноготока
1 – подшипниковый щит; 2 – подшипник; 3 – вентилятор; 4 – якорь;
5 – коллектор; 7 – главный и дополнительный полюсы; 8 –
щёткодержатель.
5.
6.
Вал ротораОбмотка ротора
Полюса статора
Подшипниковый щит
Полюса ротора
Станина
подшипниковый щит
Щетки
Подшипниковый щит
Подшипники
Коллектор
7.
1 – виток обмотки якоря; 2, 3 –
щётки; 4 – пластина коллектора
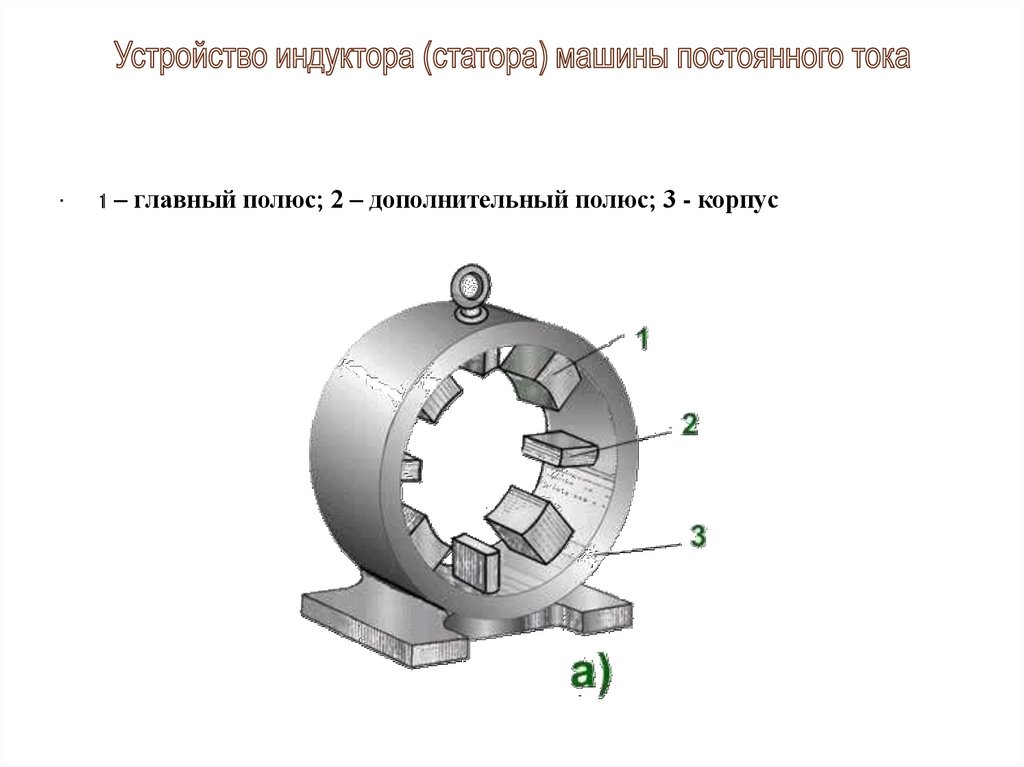
Устройство индуктора: 1 – главный
полюс;- 2- дополнительный полюс; 3
– корпус
Устройство якоря: 1 –
магнитопровод якоря; 2- обмотка
якоря; 3 - коллектор
Щеточное устройство
4 – щётки; 5 – пружины,
прижимающие щетки к коллектору
8.
1
– главный полюс; 2 – дополнительный полюс; 3 - корпус
9.
1 – сердечник якоря; 2 – обмотка якоря; 3 - коллектор
10.
4 – щётки- ; 5 - пружины, прижимающие щётки к коллектору
11.
Реакция якоря – влияние магнитного потока якоря на основной
магнитный поток. Рис.а – основной магнитный поток; б – магнитный
поток якоря; в – результирующий магнитный поток. А-Б – геометрическая нейтраль; А’-Б’ – физическая нейтраль. Приводит к искрению под
щётками , уменьшению ЭДС. Улучшение – применение компенсационной обмотки и сдвиг щёток на физическую нейтраль.
12. Коммутация МПТ – явления, вызванные изменением направления тока в проводниках обмотки якоря при переходе из одной параллельной
ветви в другую (рис. а, б, с). Рис. е:1- прямолиней-ная коммутация; 2 – замедленная коммутация; 3 – ускоренная
коммутация. Коммутация приво-дит к искрению под щётками. Улучшение –
установка дополнительных полюсов и сдвиг щеток в сторону физической нейтрали.
• а)
• б)
• с)
• е)
13.
Т. к. за период коммутации изменяется направление тока в витке, то этоозначает, что по витку протекает переменный ток, создающий переменный
магнитный поток. Последний индуктирует в коммутируемом витке э.д.с.
самоиндукции еl и взаимоиндукции ем. Сумма еl и ем называют реактивной
э.д.с. ер. Так же в коммутируемом витке наводится потоком якоря э.д.с.
вращения евр., которая направлена навстречу ер. Под действием этих э.д.с. в
витке наводится дополнительный ток Iд. От соотношения ер и евр
различают следующие виды коммутаций.
Если ер – евр = 0, ток коммутации изменяется линейно (1).
Если евр = 0, то э.д.с. ер, наводит в к.з. витке ток Iд, замедляющий процесс
коммутации. Коммутация становится замедленной (2).
При евр > ер ток ускоряет процесс и наблюдается ускоренная коммутация.
14.
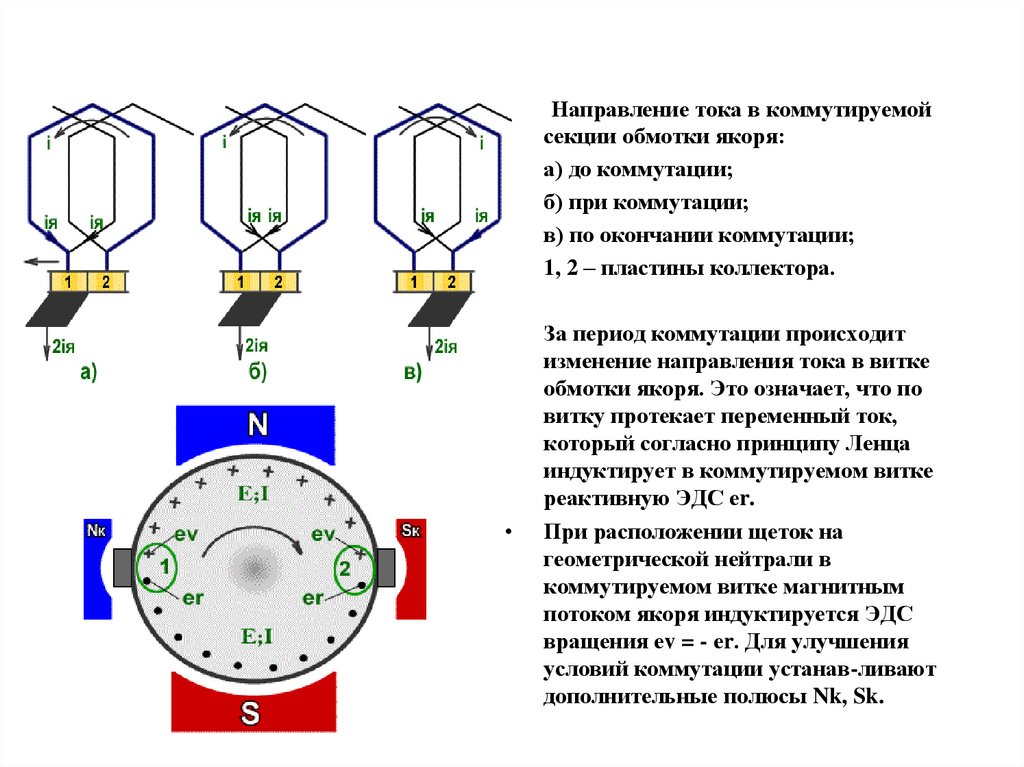
Направление тока в коммутируемой
секции обмотки якоря:
а) до коммутации;
б) при коммутации;
в) по окончании коммутации;
1, 2 – пластины коллектора.
За период коммутации происходит
изменение направления тока в витке
обмотки якоря. Это означает, что по
витку протекает переменный ток,
который согласно принципу Ленца
индуктирует в коммутируемом витке
реактивную ЭДС еr.
При расположении щеток на
геометрической нейтрали в
коммутируемом витке магнитным
потоком якоря индуктируется ЭДС
вращения еv = - еr. Для улучшения
условий коммутации устанав-ливают
дополнительные полюсы Nk, Sk.
15.
16. В зависимости от наличия обмотки возбуждения (ОВ) и схемы ее подключения относительно обмотки якоря (ОЯ) получаются следующие
типы ДПТ: независимоговозбуждения, параллельного, последовательного и смешанного возбуждения.
Независимое
Параллельное
Смешанное
ОВ
Последовательное
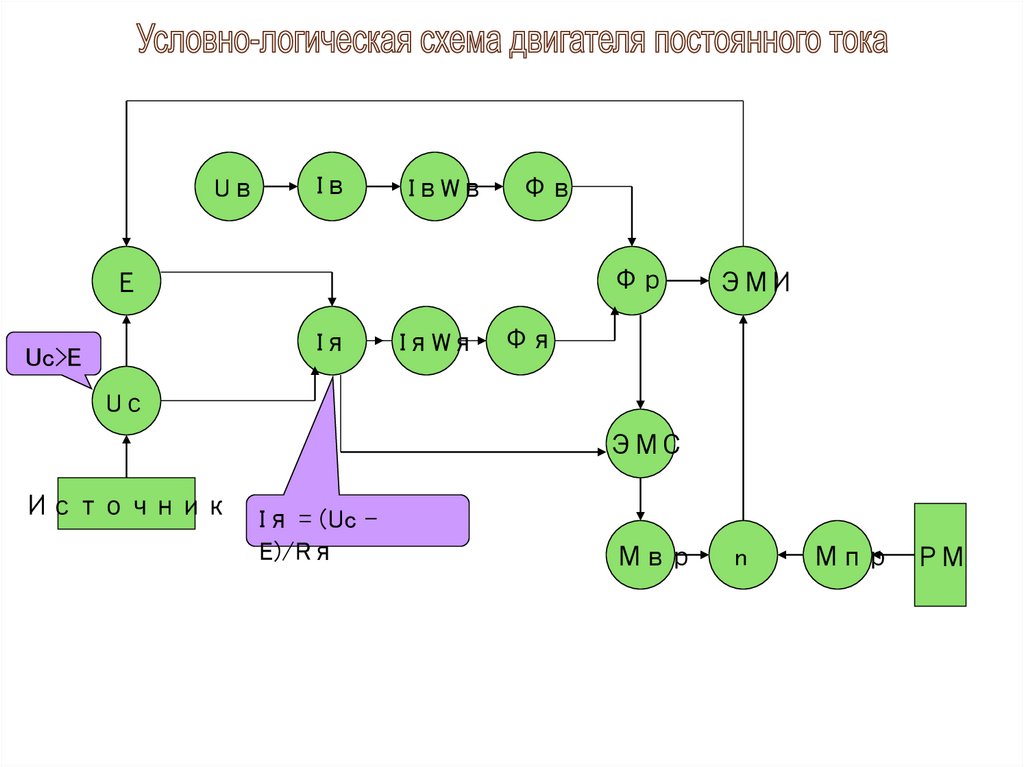
17.
UвIв
IвWв
Фв
Фр
Е
Iя
Uc>E
IяWя
ЭМИ
Фя
Uс
ЭМС
Источник
Iя = (Uc –
E)/Rя
Мвр
n
Мпр РМ
18.
NФ
F
Ф
I
M Cм Ф I я
F
I
ПЛР
M
F
I
Ф
U
S
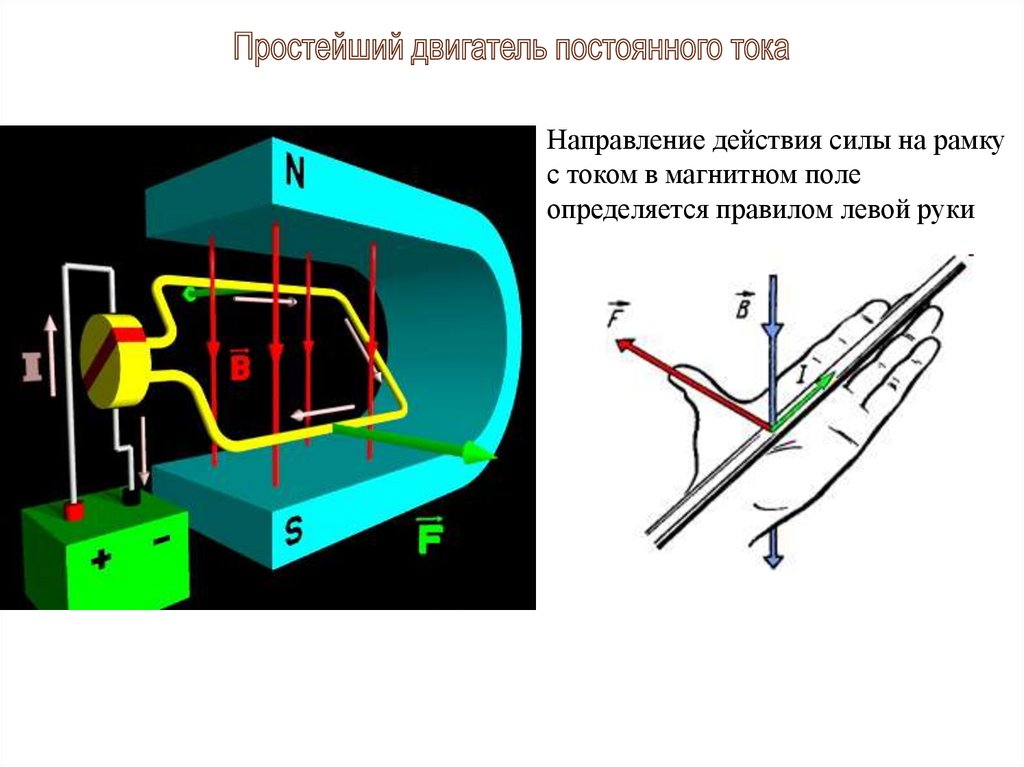
• Принцип действия ДПТ.
• От источника постоянного
напряжения U в рамку
подается ток I. По правилу
левой руки (ПЛР) на
активные проводники
(утолщенные линии)
действует пара сил
F = BlI,
• где В – магнитная индукция,
• l – длина проводника,
• I – ток в нем , создающая
электромагнитный
вращающий момент M.
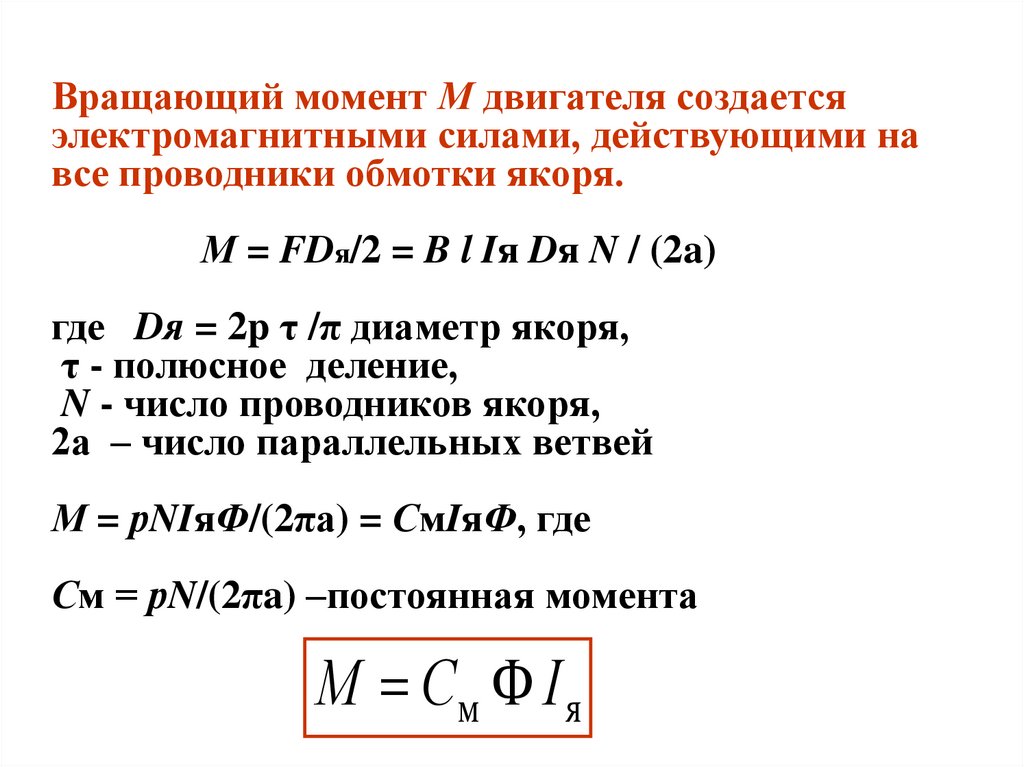
19.
Вращающий момент М двигателя создаетсяэлектромагнитными силами, действующими на
все проводники обмотки якоря.
М = FDя/2 = B l Iя Dя N / (2a)
где Dя = 2p τ /π диаметр якоря,
τ - полюсное деление,
N - число проводников якоря,
2а – число параллельных ветвей
М = рNIяФ/(2πа) = СмIяФ, где
См = рN/(2πa) –постоянная момента
M Cм Ф I я
20.
•При вращении рамки активные проводники пересекают силовые линиипотока Ф и в них по закону электромагнитной индукции наводятся ЭДС,
направления которых определяются по правилу правой руки (ППР). Т. к.
ЭДС направлены против тока Iя они называются противо-ЭДС. Согласно
правилу Ленца: ЭДС действуют против причины, их вызвавшей, т. е.
против тока I.
Ф
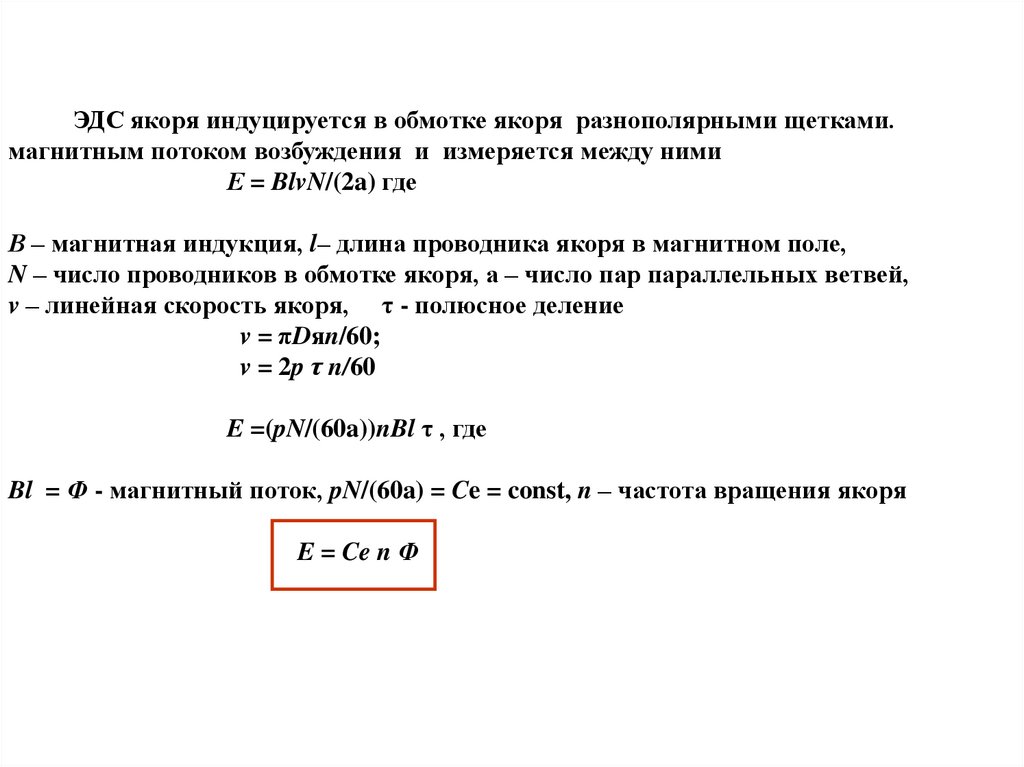
21.
ЭДС якоря индуцируется в обмотке якоря разнополярными щетками.магнитным потоком возбуждения и измеряется между ними
Е = BlvN/(2a) где
В – магнитная индукция, l– длина проводника якоря в магнитном поле,
N – число проводников в обмотке якоря, а – число пар параллельных ветвей,
v – линейная скорость якоря, τ - полюсное деление
v = πDяn/60;
v = 2p τ n/60
E =(pN/(60a))nBl τ , где
Bl = Ф - магнитный поток, pN/(60a) = Ce = const, n – частота вращения якоря
E = Ce
nФ
22.
Направление действия силы на рамкус током в магнитном поле
определяется правилом левой руки
23.
iна
Е
По второму закону КИРХГОФА для цепи якоря:
U я Rя E
Ток якоря
Сопротивление
якоря
Противо-ЭДС якоря
возникает
в
ОЯ
и
направлена навстречу току
якоря.
По первому закону КИРХГОФА для узловой точки «а»
Iн = Iя + Iв
24. U – напряжение сети; Ф – магнитный поток; М – вращающий момент; Iя – ток якоря; n – частота вращения якоря; Се, См –
соответственно постоянные ЭДС и момента• U = СеФn
Напряжение
сети
+ Rя Iя
Магнитный
поток
• Е = СеФn
ПротивоЭДС
Постоянная
• М = См ФIя
Момент
Iя = (U – СеФn)/Rя
Ток
якоря
Полное сопротивление цепи
якоря
n = (U – Rя Iя) /CeФ
Частота
вращения
n= (U /CeФ) – (Rя М/CeCмФ )
2
Уравнение механической характеристики
25.
В момент пуска якорь двигателя неподвижен (n = 0), поэтому отсутствуетпротивоЭДС (E = CeФn = 0).
Из уравнения якорной цепи видно, что пусковой ток якоря Iя.п = Uном/Rя
ограничен только сопротивлением обмотки якоря Rя. Поскольку Rя мало
(особенно у ДПТ средней и большой мощности), то пусковой ток велик и
превышает номинальное значение в десятки раз. Время пуска tп длится
десятые доли секунды у маломощных двигателей (менее 1 кВт) и достигает
нескольких десятков секунд у мощных.
n, iя
nном
iя
n
Iном
t
tп
Существуют три способа пуска:
1) Прямой пуск применяют только для маломощных двигателей, у которых
Iя.п не превышает (4 6)Iном.
26.
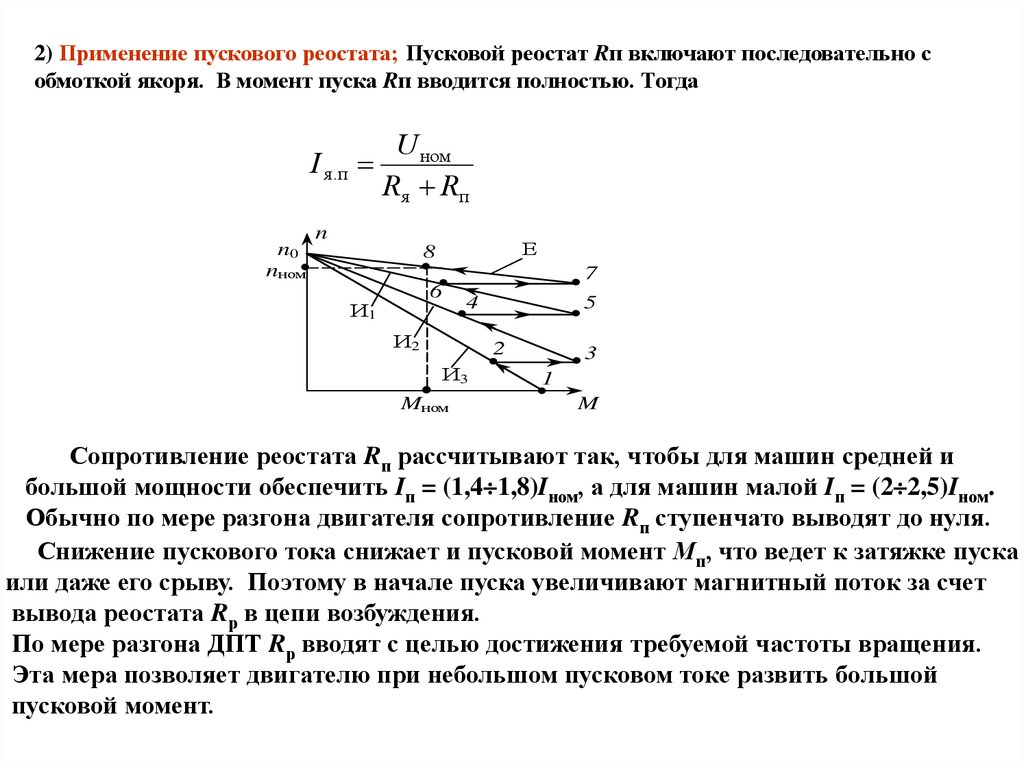
2) Применение пускового реостата; Пусковой реостат Rп включают последовательно собмоткой якоря. В момент пуска Rп вводится полностью. Тогда
I я.п
n0
nном
U ном
Rя Rп
n
Е
8
7
6
И1
4
И2
5
2
И3
Mном
3
1
M
Сопротивление реостата Rп рассчитывают так, чтобы для машин средней и
большой мощности обеспечить Iп = (1,4 1,8)Iном, а для машин малой Iп = (2 2,5)Iном.
Обычно по мере разгона двигателя сопротивление Rп ступенчато выводят до нуля.
Снижение пускового тока снижает и пусковой момент Мп, что ведет к затяжке пуска
или даже его срыву. Поэтому в начале пуска увеличивают магнитный поток за счет
вывода реостата Rр в цепи возбуждения.
По мере разгона ДПТ Rр вводят с целью достижения требуемой частоты вращения.
Эта мера позволяет двигателю при небольшом пусковом токе развить большой
пусковой момент.
27.
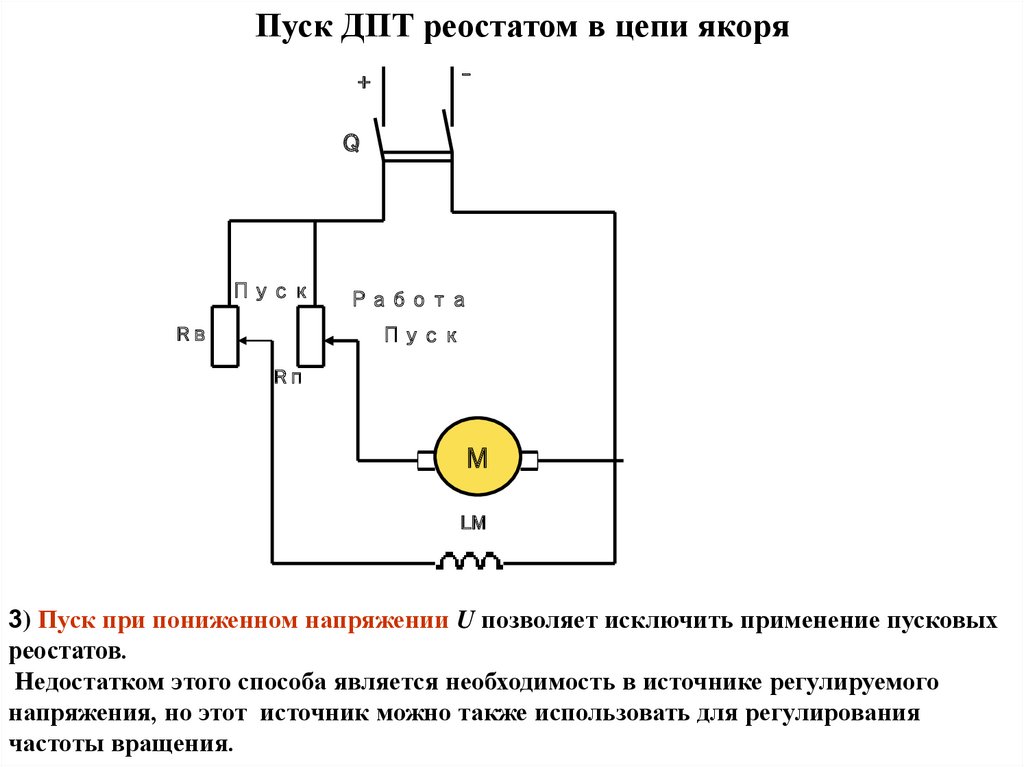
Пуск ДПТ реостатом в цепи якоря_
+
Q
Пуск
Rв
Работа
Пуск
Rп
М
LM
3) Пуск при пониженном напряжении U позволяет исключить применение пусковых
реостатов.
Недостатком этого способа является необходимость в источнике регулируемого
напряжения, но этот источник можно также использовать для регулирования
частоты вращения.
28.
Способы регулирования частоты вращения:1. Изменением
напряжения на якоре
2. Изменением сопротивления якоря:
введением реостата в цепь якоря. Влияет
только на потери частоты под нагрузкой.
Не экономично – потери на реостате.
Rя М
U
n
2
CЕФ CЕ C мФ
3. Изменением величины магнитного потока
возбуждения: введение реостата в цепь
обмотки возбуждения. Влияет в большей
степени на частоту холостого хода. Наиболее
экономично.
29.
Iяn
I”я = Iя
Iя
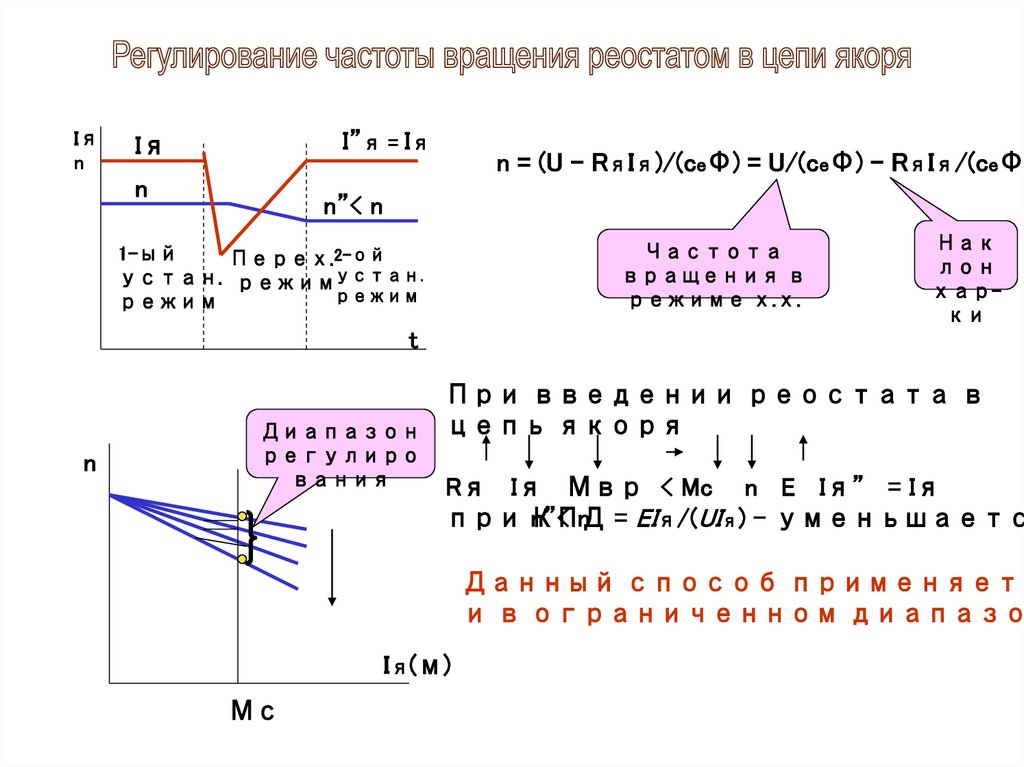
n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ)
n
1-й
устан.
режим
n”<n
Перех. 2-ой уст.
режим режим t
Частота вращения в
режиме х.х.
Наклон
хар-ки
При уменьшении напряжения:
n
U Iя Мвр < Mc n E Iя” = Iя при n”< n
Uном
КПД = Е I я /( UIя) – не меняется
U < Uном
Iя (М)
Данный способ применяется в диапазоне
регулирования 1:10…1:20 вниз.
Экономичен при Мс =const.
Такую характеристику имеют транспортеры,
компрессоры, шнековые машины, элеваторы и
др.
30.
Iяn
I”я = Iя
Iя
n
n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ)
n”< n
Частота
вращения в
режиме х.х.
1-ый
Перех.2-ой
устан. режимустан.
режим
режим
Нак
лон
харки
t
n
Диапазон
регулиро
вания
При введении реостата в
цепь якоря
Rя Iя Мвр < Mc n E Iя” = Iя
при КПД
n”< n = EIя/(UIя) - уменьшаетс
Данный способ применяетс
и в ограниченном диапазо
Iя(м)
Мс
31.
n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ)Iя
n
I”я > Iя
Iя
n
n”> n
Частота вращения в
режиме х.х.
Нак
лон
КПД = EIя/(UIя) – не меняется
харки
Данный способ применяется
Перех.2-ой
в диапазоне регулирования
1-ый
устан. режимустан. 1:2, а в спец. исполнении 1:6.
режим
режим
n
Ф < Фном
Фном
Iя (M)
Ф Iя Мвр >Мс n
Экономичность связана с
характером изменения Мс.
При ум . магнитного потока
уменьшается Мвр. При Мс =const
для сохранения равенства
моментов должен возрасти
ток якоря. Таким образом,
двигатель полностью
загруженный при n мах
окажется недогруженным при
n min, Следовательно,
двигатель надо выбирать с
двойным запасом мощности,
Eчто
I” я неэкономично.
>Iя при n”> n
32. а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U якоря (независимое возбуждение)
а – Ф (параллельное возбуждение);б – Ф или U якоря (последовательное
возбуждение);
вn– U якоря (независимое возбуждение)
•n
Φ2 < Φ1
02
n01
n0
n
Φ1 < Φном
Φном
2
1
3
Все способы регул
частоты вращения
плавные
M
а
Φ1 < Φном
Φном, Uном
U1 < Uном
M
б
n
Uном
U1 < Uном
U2 < U1
M
в
33.
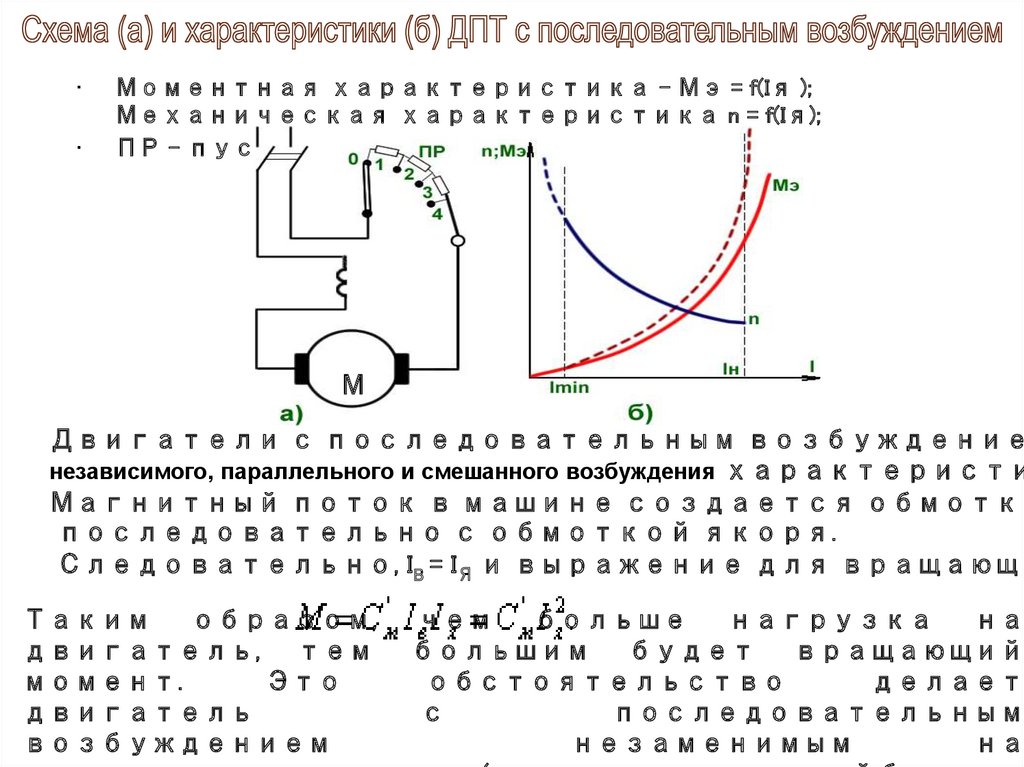
Моментная характеристика – Мэ = f (Iя ); Механическая
характеристика n = f ( Iя);
ПР – пуско-регулировочный реостат Rр – реостат в
цепи возбуждения
М
Вращающий момент у двигателей с независимы
с увеличением нагрузки может как расти, так
ростом потребляемого тока I и размагничиван
уменьшается магнитный поток Ф.
34.
Моментная характеристика – Мэ = f(Iя );
Механическая характеристика n = f(Iя);
ПР – пуско-регулировочный реостат
М
Двигатели с последовательным возбуждение
независимого, параллельного и смешанного возбуждения характеристи
Магнитный поток в машине создается обмотко
последовательно с обмоткой якоря.
Следовательно, IB = IЯ и выражение для вращающе
Таким
образом,
двигатель, тем
момент.
Это
двигатель
возбуждением
чем
больше
нагрузка
на
большим будет вращающий
обстоятельство
делает
с
последовательным
незаменимым
на
35.
Формула момента двигателя постоянного тока:M=CMФ IЯ
где CM - коэффициент пропорциональности.
Вращающий момент у двигателей с независимы
с увеличением нагрузки может как расти, так
ростом потребляемого тока I и размагничиван
магнитный поток Ф.
Двигатели с последовательным возбуждением
Независимого, параллельного и смешанного возбуждения характеристик
Из схемы рис. б, видно, что магнитный поток в маш
возбуждения, включенной последовательно с о
Следовательно, IB = IЯ и выражение для вращающег
Последняя формула показывает, что чем больше
большим будет вращающий момент. Это обстояте
последовательным возбуждением незаменимым
троллейбусе и т.д.).
Реверсирование или изменение направления в
тока может осуществляться изменением поляр
либо в обмотке возбуждения
36. Торможение ДПТ осуществляется тремя способами: динамическое (а, б), генераторное (рекуперативное -в), противовключением
Торможение ДПТ осуществляется тремя
способами: динамическое (а, б),
генераторное (рекуперативное -в),
противовключением
ОВ
Rт
а2
n
n0
а1
а2
а3
n n0
0
Е
U
а
–M
M
б
а1
а4
Mс
–M
M
в
• Динамическое торможение: якорь двигателя отключается от сети
и переключается на реостат. Iя и М изменяют направление.
• Рекуперативное торможение: Е >U, Iя и М становятся
отрицательными. Это наблюдается при спуске двигателем груза
или ходе трамвая под уклон. Этот режим наблюдается при резком
снижении напряжения якоря (в).
37.
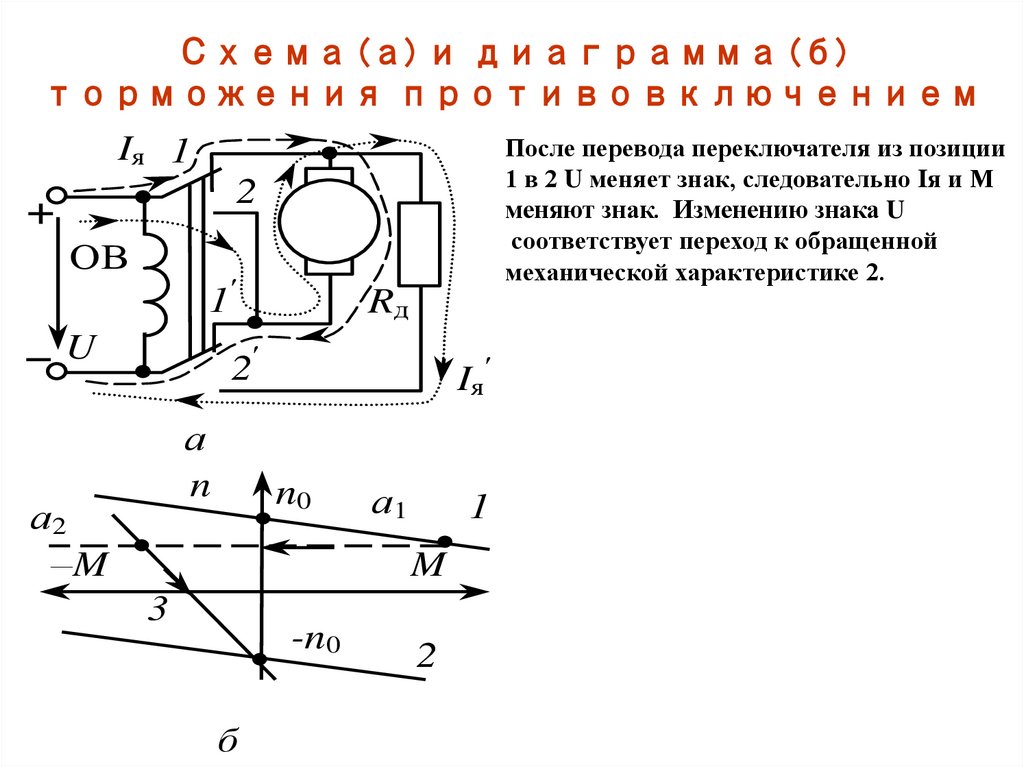
Схема (а) и диаграмма (б)торможения противовключением
После перевода переключателя из позиции
1 в 2 U меняет знак, следовательно Iя и М
меняют знак. Изменению знака U
соответствует переход к обращенной
механической характеристике 2.
Iя 1
2
ОВ
1
U
Rд
2
а
n
а2
–M
Iя
n0
а1
1
M
3
-n0
б
2
38.
Реверсирование или изменвращения якоря двигателей п
осуществляться изменением
в обмотке якоря, либо в обмот
39.
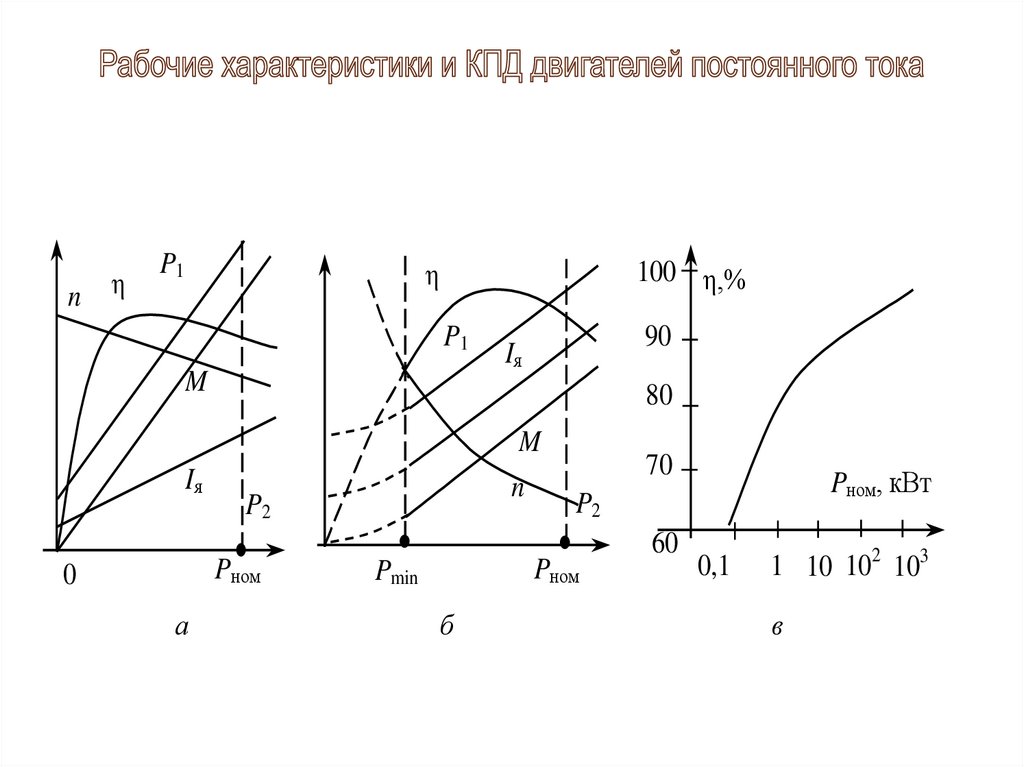
nη
P1
η
100 η,%
P1
M
90
Iя
80
M
Iя
P2
Pном
0
а
n
70
P2
Pном
Pmin
б
Pном, кВт
60
0,1
1 10 102 103
в
40.
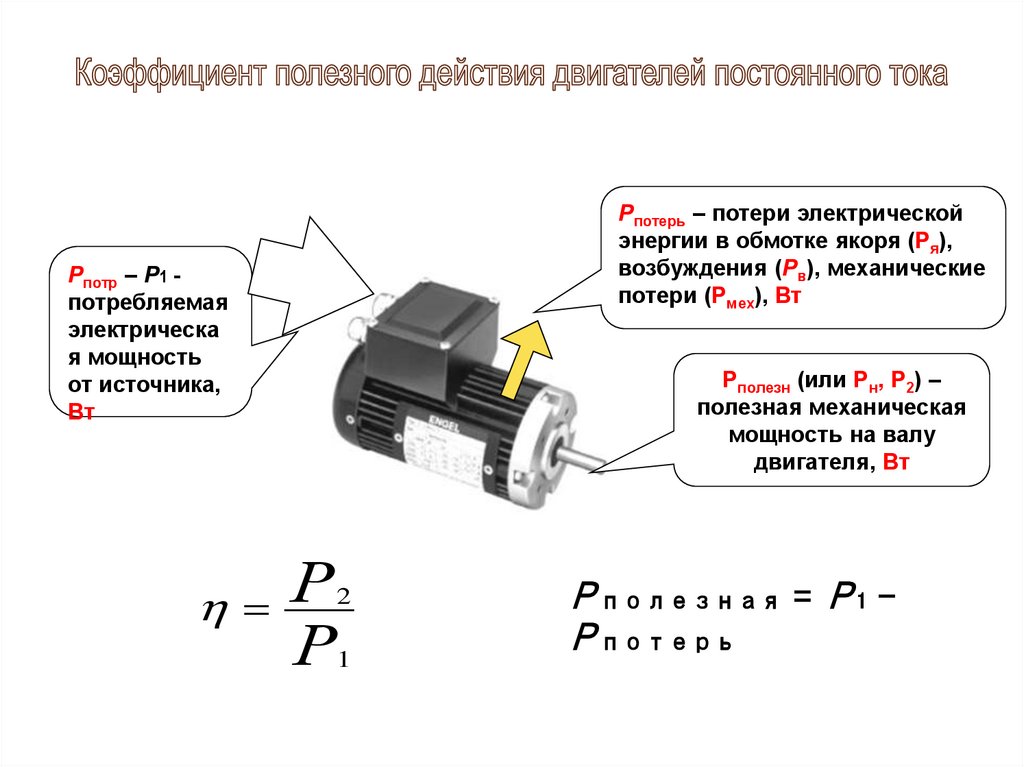
Pпотерь – потери электрическойэнергии в обмотке якоря (Pя),
возбуждения (Pв), механические
потери (Pмех), Вт
Pпотр – Р1 потребляемая
электрическа
я мощность
от источника,
Вт
Pполезн (или Pн, P2) –
полезная механическая
мощность на валу
двигателя, Вт
Р
Р
2
1
Рполезная = Р1 –
Рпотерь
41.
ДостоинстваНедостатки
1. Значительный пусковой
момент Мп
1. Искрение в коллекторнощеточном узле
2.Регулирование частоты
вращения плавное и в
широком диапазоне
2. Износ щеток и коллектора
3. Линейность механической
характеристики
4. Устойчивость работы
3. Малый срок службы
4. Необходимость частого
технического
обслуживания
42.
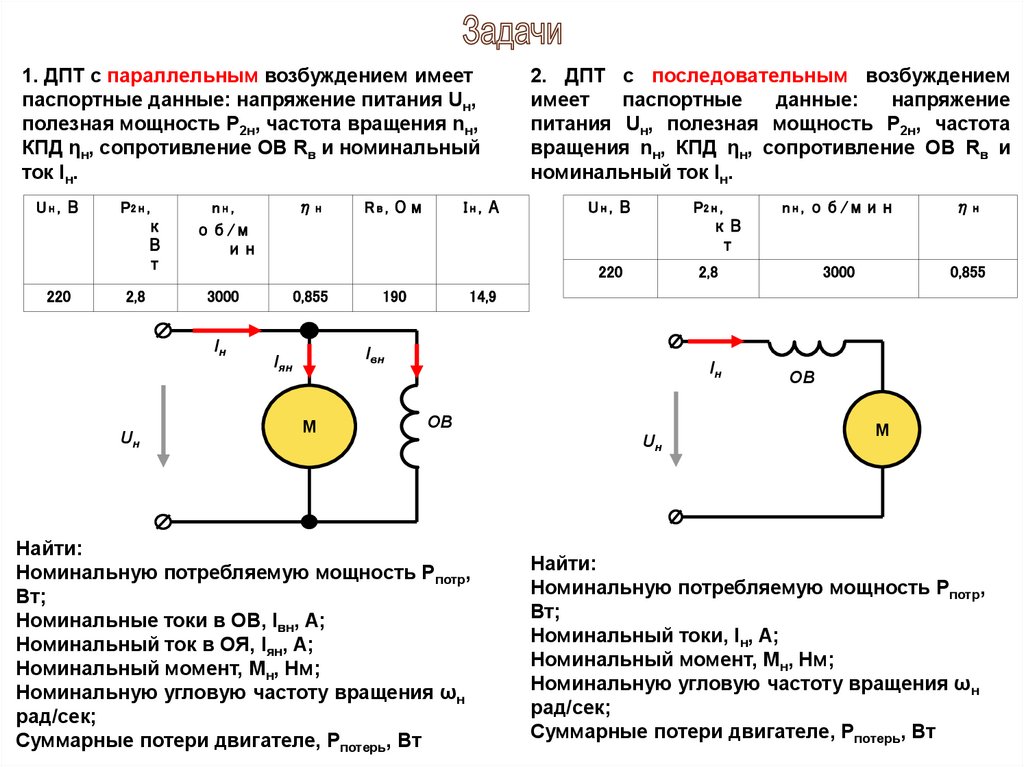
1. ДПТ с параллельным возбуждением имеетпаспортные данные: напряжение питания Uн,
полезная мощность P2н, частота вращения nн,
КПД ηн, сопротивление ОВ Rв и номинальный
ток Iн.
Uн, В
220
P2н,
к
В
т
2,8
nн,
об/м
ин
Rв, Ом
I н, А
Uн, В
P2н,
кВ
т
220
3000
Iн
Uн
ηн
2. ДПТ с последовательным возбуждением
имеет
паспортные
данные:
напряжение
питания Uн, полезная мощность P2н, частота
вращения nн, КПД ηн, сопротивление ОВ Rв и
номинальный ток Iн.
0,855
190
М
ηн
3000
0,855
2,8
14,9
Iвн
Iян
nн, об/мин
Iн
ОВ
Найти:
Номинальную потребляемую мощность Pпотр,
Вт;
Номинальные токи в ОВ, Iвн, А;
Номинальный ток в ОЯ, Iян, А;
Номинальный момент, Мн, Нм;
Номинальную угловую частоту вращения ωн
рад/сек;
Суммарные потери двигателе, Pпотерь, Вт
Uн
ОВ
М
Найти:
Номинальную потребляемую мощность Pпотр,
Вт;
Номинальный токи, Iн, А;
Номинальный момент, Мн, Нм;
Номинальную угловую частоту вращения ωн
рад/сек;
Суммарные потери двигателе, Pпотерь, Вт
43.
1. Что такое режим холостого хода и короткого замыкания длядвигателя постоянного тока?
2. Какие функции выполняет коллектор и щетки двигателя
постоянного тока?
3. Что такое механическая характеристика, рабочие
характеристики?
4. Способы возбуждения двигателя постоянного тока
5. На какие процессы расходуется потребляемая двигателем
постоянного тока мощность?
6. Перечислить основные элементы и узлы двигателя
постоянного тока
7. Охарактеризовать величины входящие в уравнение механической
характеристики двигателя постоянного тока.
8. Двигатель постоянного тока какого возбуждения идет «вразнос»
при уменьшении нагрузки?
9. Что такое и чем характеризуется номинальный режим работы
двигателя постоянного тока?
10. Что такое искусственные механические
характеристики двигателя
постоянного тока?
44.
45. а – независимое возбуждение ; б – параллельное воэбуждение; в – последовательное возбуждение; г- -смешанное возбуждение. Схемы
а – независимое возбуждение ; б –параллельное воэбуждение;
в – последовательное возбуждение; г- смешанное возбуждение.
Схемы самовозбуждения – б, ПД
с, г.
ПД
ПД
ПД
46.
1. Нагрузка отключена;2. Наличие остаточного магнитного
потока Ф;
3. Однонаправленность остаточного
магнитного потока и потока
возбуждения;
4. Сопротивление цепи возбуждения Rр <
Iя
Rр кр.
Rн
Rр
ОВ
Iв
Rр
ОВ1
E
E
Iя
а
U
Iн
ОВ2
ОВ
U
б
E
Iя
в
U
Rн
Rн
47.
Якорь генератора приводится во
вращение приводным двигателем,
развивающим вращающий момент
М1.Якорь генератора начинает
вращаться с частотой вращения
приводного двигателя n. При
перемещении проводников обмотки
якоря в магнитном потоке полюсов в
них индуктируется ЭДС Е = Се n Ф,
направление которой определяется
по правилу правой руки. При
замыкании обмотки якоря на
нагрузку Rн в цепи якоря будет
протекать ток I я, направление
которого совпадает с направлением
ЭДС Е. При взаимодействии тока Iя
с магнитным полем полюсов
создаётся электромагнитный момент
Мэ (тормозной), направление
которого определяется по правилу
левой руки.
48.
UвIв
IвWв
Фв
Фр
Е
Iя
Uc<E
IяWя
ЭМИ
Фя
Uс
ЭМС
Нагрузка
Iя = (E –
Uг)/Rя
Мпр
n
Мвр
Д
49.
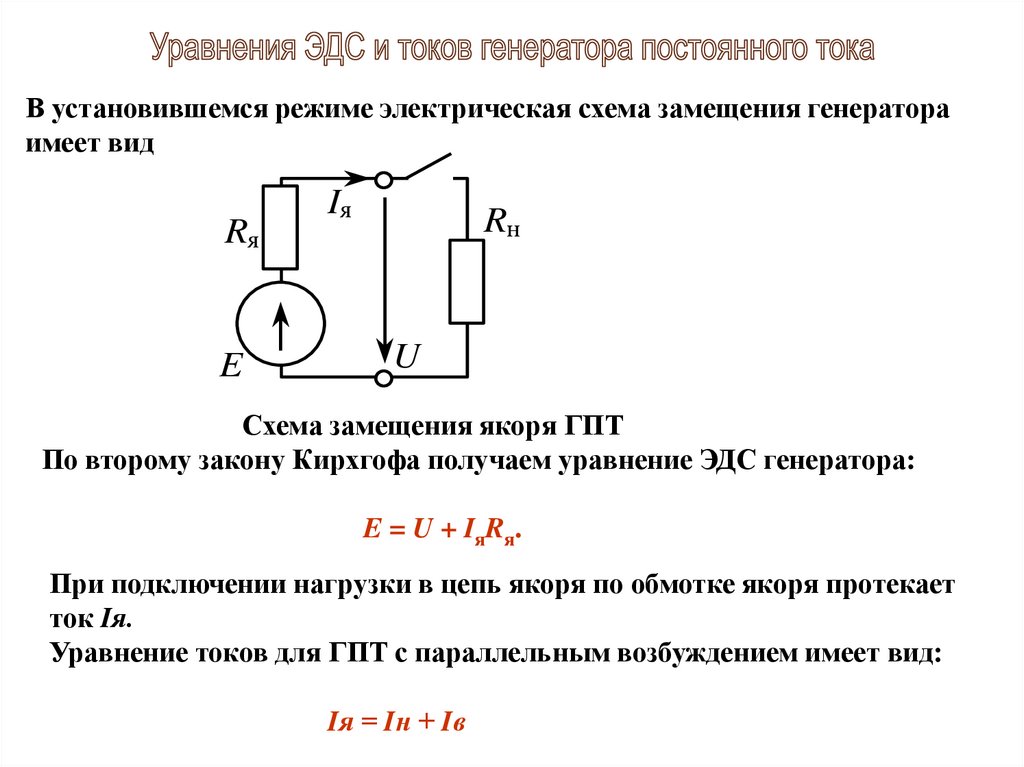
В установившемся режиме электрическая схема замещения генератораимеет вид
Rя
E
Iя
Rн
U
Схема замещения якоря ГПТ
По второму закону Кирхгофа получаем уравнение ЭДС генератора:
E = U + IяRя.
При подключении нагрузки в цепь якоря по обмотке якоря протекает
ток Iя.
Уравнение токов для ГПТ с параллельным возбуждением имеет вид:
Iя = Iн + Iв
50. Рис.а – при перемагничивании стали; 3 – основная характеристика холостого хода; Рис. б – при изменении частоты вращения якоря;
1 – прином
n ном.; 2 – при n > n ном; 3 – при n <n
51. а) – ΔUпн – изменение напряжения ГПТ при изменении нагрузки от номинальной до 0. б) – 1 – ГПТ с независимым возбуждением; 2 – с
параллельным; 3 – с повышением напряжения; в) - споследовательным : 1 – изменение ЭДС; 2 – изменение
напряжения;
г) – со смешанным возбуждением: 1 – нормальное
возбуждение; 2 – недовозбуждение;
3 – перевозбуждение; 4 – встречное включение обмоток
возбуждения
.
52.
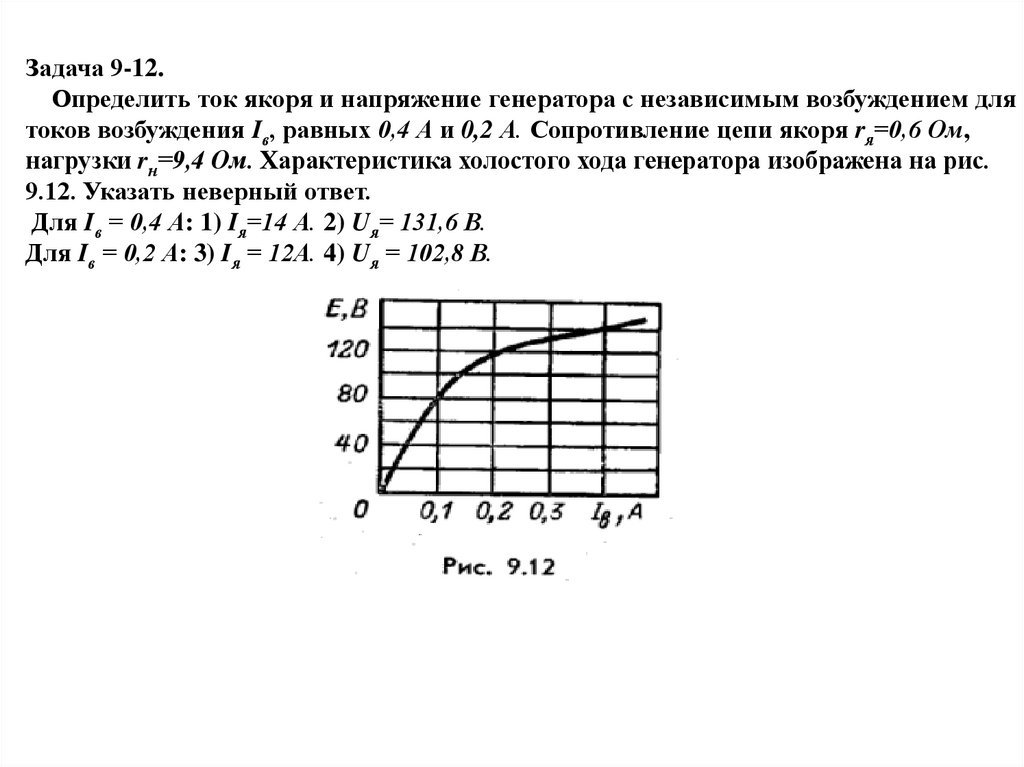
Задача 9-12.Определить ток якоря и напряжение генератора с независимым возбуждением для
токов возбуждения Iв, равных 0,4 А и 0,2 А. Сопротивление цепи якоря rя=0,6 Ом,
нагрузки rн=9,4 Ом. Характеристика холостого хода генератора изображена на рис.
9.12. Указать неверный ответ.
Для Iв = 0,4 А: 1) Iя=14 А. 2) Uя= 131,6 В.
Для Iв = 0,2 А: 3) Iя = 12А. 4) Uя = 102,8 В.
53.
Решение 9-12.Электродвижущую силу генератора
определяем по характеристике холостого
хода рис.9.12:
а) при IВ = 0,4 А ЭДС Еa = 140 В;
б) при IВ = 0,2 А ЭДС Еб = 120 В.
Ток якоря определяем по закону Ома:
a) Iя,а=Eа/(rн+rя)=140/(9,44+0,6)=14 A;
б) Iя,б=Eб/(rн+rя) = 120/(9,4+0,6) = 12 А.
Напряжение генератора меньше ЭДС на
падение напряжения в обмотке якоря:
а) Uа = Еа – Iя,а rя = 140 - 14∙0,6 = 131,6 В ;
б) Uа=Еа – Iя,а rя = 120 - 12∙0,6 = 112,8 В. Ответ: 4.