











 physics
physicsSimilar presentations:










Исследование наноматериалов методами сканирующей зондовой микроскопии
1.
Исследование наноматериаловметодами сканирующей зондовой
микроскопии
2. Краткая история
2Краткая история
1981 год – изобретение сканирующего
туннельного микроскопа (СТМ)
1986 год – изобретение
атомно-силового микроскопа (АСМ)
1986 год – Нобелевская премия по физике
за создание СТМ
1990 год – создание промышленной
технологии производства кантилеверов
Heinrich Rohrer
1990 год – начало развития второго
поколения зондовых микроскопов
2000 - Начало бурного развития
ближнеполной оптической микроскопии
Gerd Binning
Исследование наноматериалов методами сканирующей зондовой микроскопии
3. Сравнительные характеристики
2Сравнительные
характеристики
Увеличение
Рабочая
среда
Размерность
изображения
Повреждение
образца
Оптическая
микроскопия
103
воздух,
жидкость
2D
нет
Лазерная
конфокальная
микроскопия
104
воздух
2D/3D
минимальное
Ионный
микроскоп
105
вакуум
2D
сильное
Сканирующая
электронная
микроскопия
106
вакуум
2D
слабое
Сканирующая
зондовая
микроскопия
8
воздух,
жидкость,
вакуум
3D
Зависит от
метода
Методика
10
4. Классификация методов СЗМ
Сканирующая зондовая микроскопия (СЗМ)Сканирующая туннельная
микроскопия
Скнирующая
тунельная
спектроскопия
Сканирующая оптическая
микроскопия ближнего поля
Сканирующая силовая микроскопия
Контактная атомно-силовая
микроскопия
Сканирующая
ближнепольная
спектроскопия
Бесконтактная атомно-силовая
микроскопия
Микроскопия латеральных сил
Магнитная силовая микроскопия
Микроскопия модуляции силы
Электрическая силовая микроскопия
Сканирующая емкостная микроскопия
Силовая микроскопия пьезоотклика
Микроскопия зонда Кельвина
4
5. Основные части Зондового микроскопа
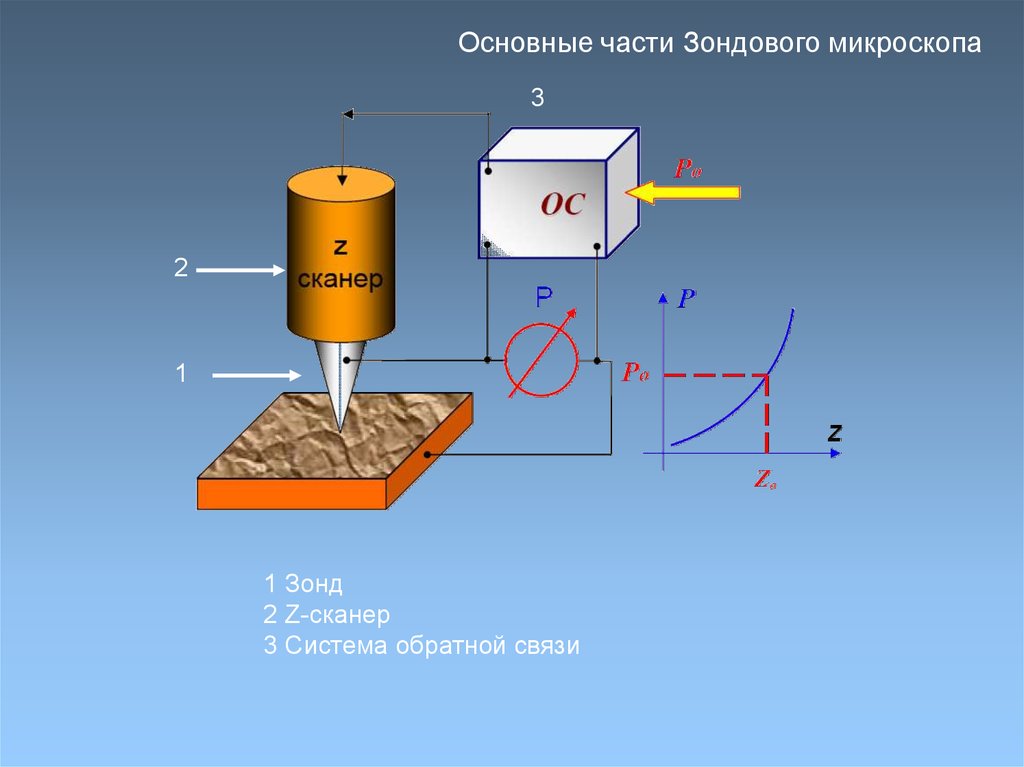
Структурная схема сканирующего зондового микроскопа (для
приборов, в которых сканирование осуществляется образцом)
6.
Основные части Зондового микроскопа3
4
2
1
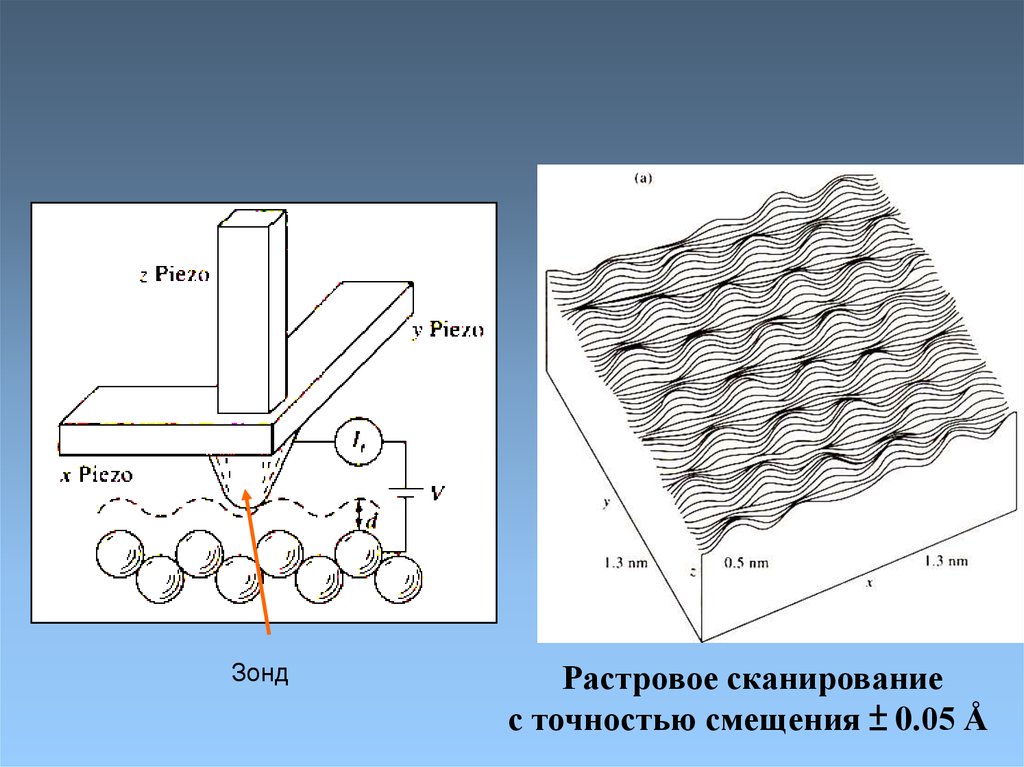
1 Зонд
2 Z-сканер
3 Система обратной связи
7.
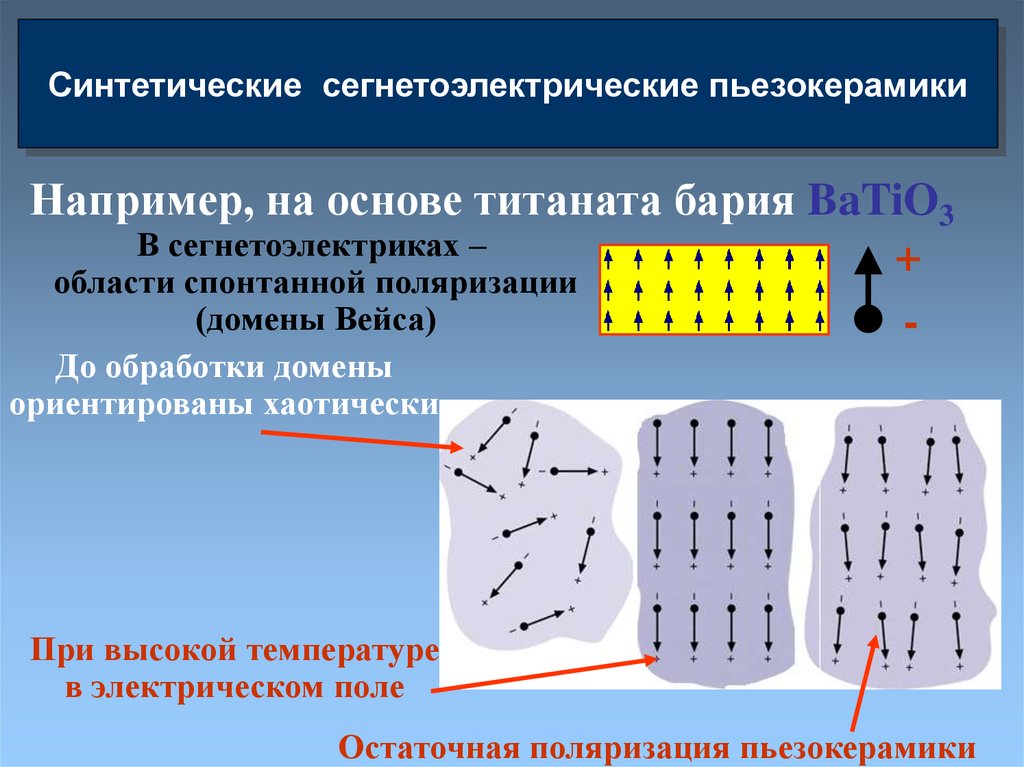
Синтетические сегнетоэлектрические пьезокерамикиНапример, на основе титаната бария BaTiO3
В сегнетоэлектриках –
+
области спонтанной поляризации
(домены Вейса)
До обработки домены
ориентированы хаотически
При высокой температуре
в электрическом поле
Остаточная поляризация пьезокерамики
8.
Поляризуемость —физическое свойство веществ приобретать электрический или магнитный
дипольный момент (поляризацию) во внешнем электромагнитном поле.
Термин поляризуемость также употребляется для обозначения
коэффициента, характеризующего линейную зависимость индуцированного
дипольного момента атома, молекулы и т.п. от напряженности вызвавшего
поляризацию внешнего поля, а для среды - также как синоним средней
поляризуемости ее частиц
Электрическая поляризуемость среды
характеризуется величиной диэлектрической восприимчивости
, являющейся коэффициентом линейной связи между
поляризацией диэлектрика P и внешним электрическим полем
E в достаточно малых полях:
9.
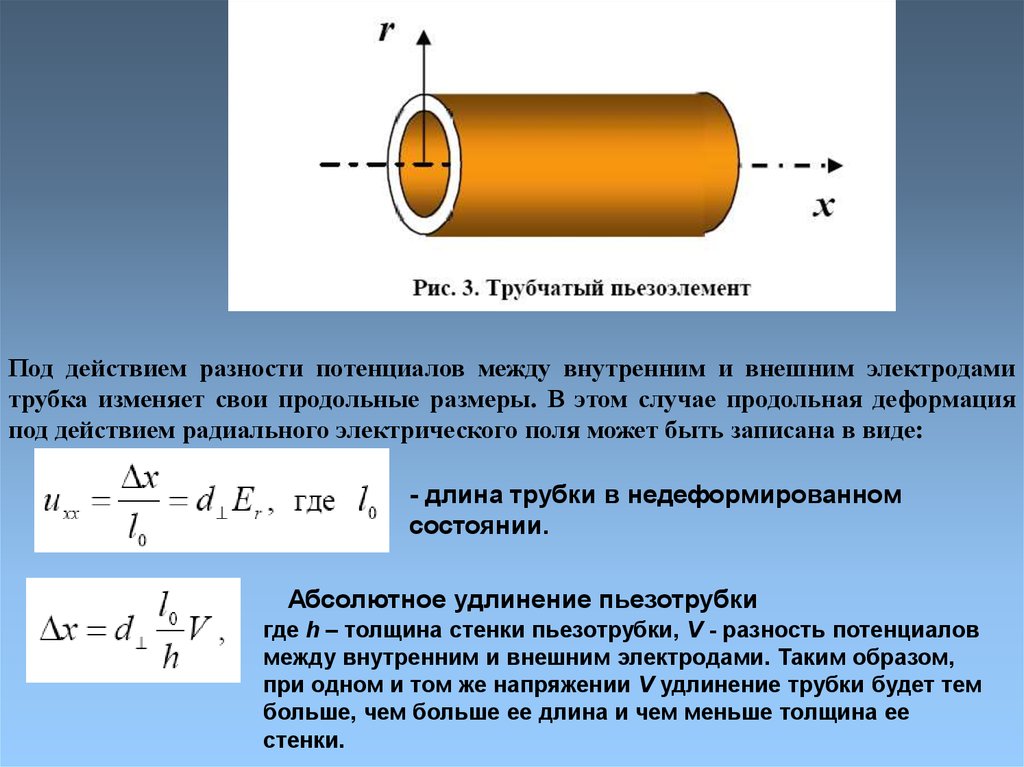
Под действием разности потенциалов между внутренним и внешним электродамитрубка изменяет свои продольные размеры. В этом случае продольная деформация
под действием радиального электрического поля может быть записана в виде:
- длина трубки в недеформированном
состоянии.
Абсолютное удлинение пьезотрубки
где h – толщина стенки пьезотрубки, V - разность потенциалов
между внутренним и внешним электродами. Таким образом,
при одном и том же напряжении V удлинение трубки будет тем
больше, чем больше ее длина и чем меньше толщина ее
стенки.
10.
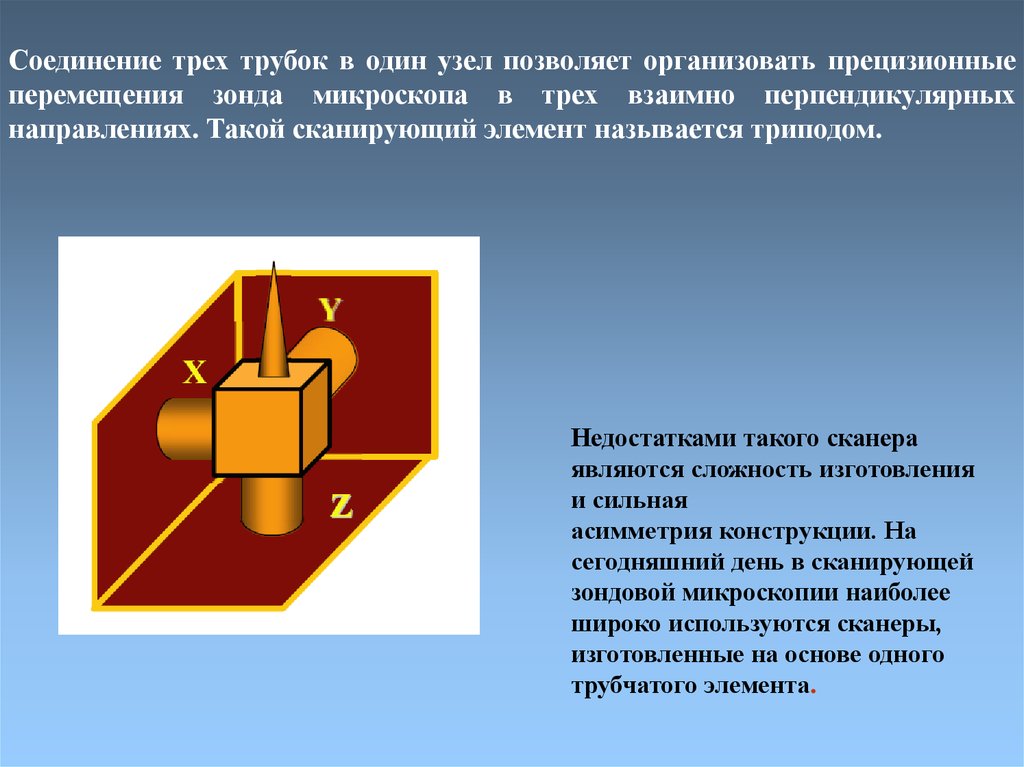
Соединение трех трубок в один узел позволяет организовать прецизионныеперемещения зонда микроскопа в трех взаимно перпендикулярных
направлениях. Такой сканирующий элемент называется триподом.
Недостатками такого сканера
являются сложность изготовления
и сильная
асимметрия конструкции. На
сегодняшний день в сканирующей
зондовой микроскопии наиболее
широко используются сканеры,
изготовленные на основе одного
трубчатого элемента.
11.
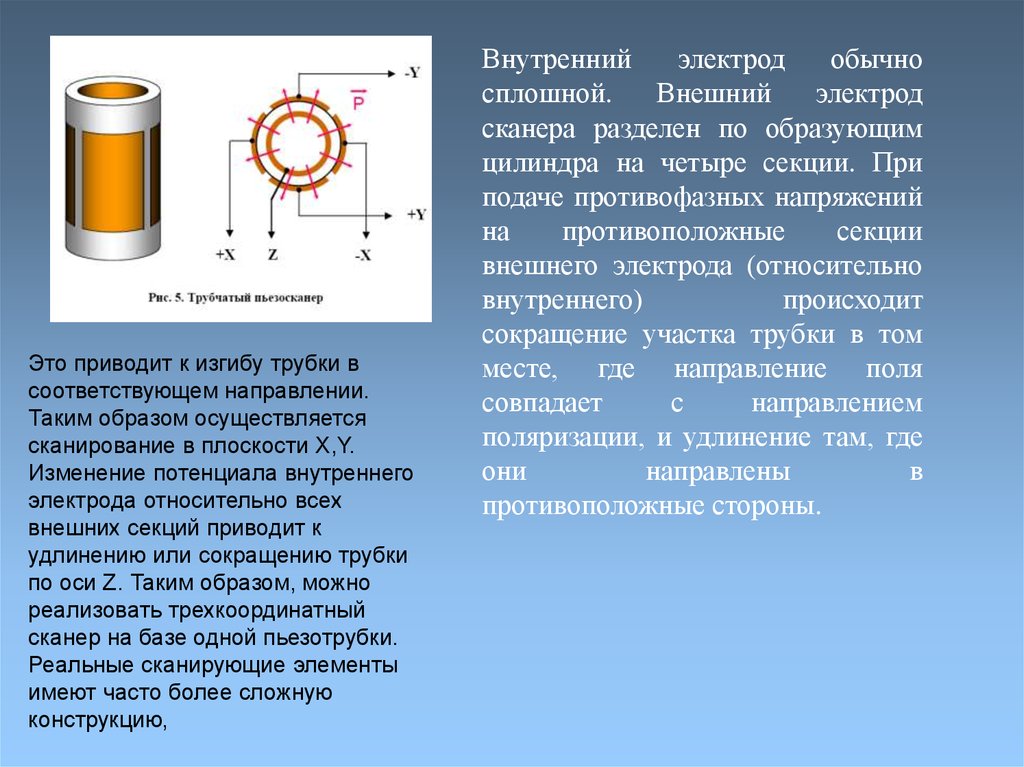
Это приводит к изгибу трубки всоответствующем направлении.
Таким образом осуществляется
сканирование в плоскости X,Y.
Изменение потенциала внутреннего
электрода относительно всех
внешних секций приводит к
удлинению или сокращению трубки
по оси Z. Таким образом, можно
реализовать трехкоординатный
сканер на базе одной пьезотрубки.
Реальные сканирующие элементы
имеют часто более сложную
конструкцию,
Внутренний
электрод
обычно
сплошной.
Внешний
электрод
сканера разделен по образующим
цилиндра на четыре секции. При
подаче противофазных напряжений
на
противоположные
секции
внешнего электрода (относительно
внутреннего)
происходит
сокращение участка трубки в том
месте, где направление поля
совпадает
с
направлением
поляризации, и удлинение там, где
они
направлены
в
противоположные стороны.
12.
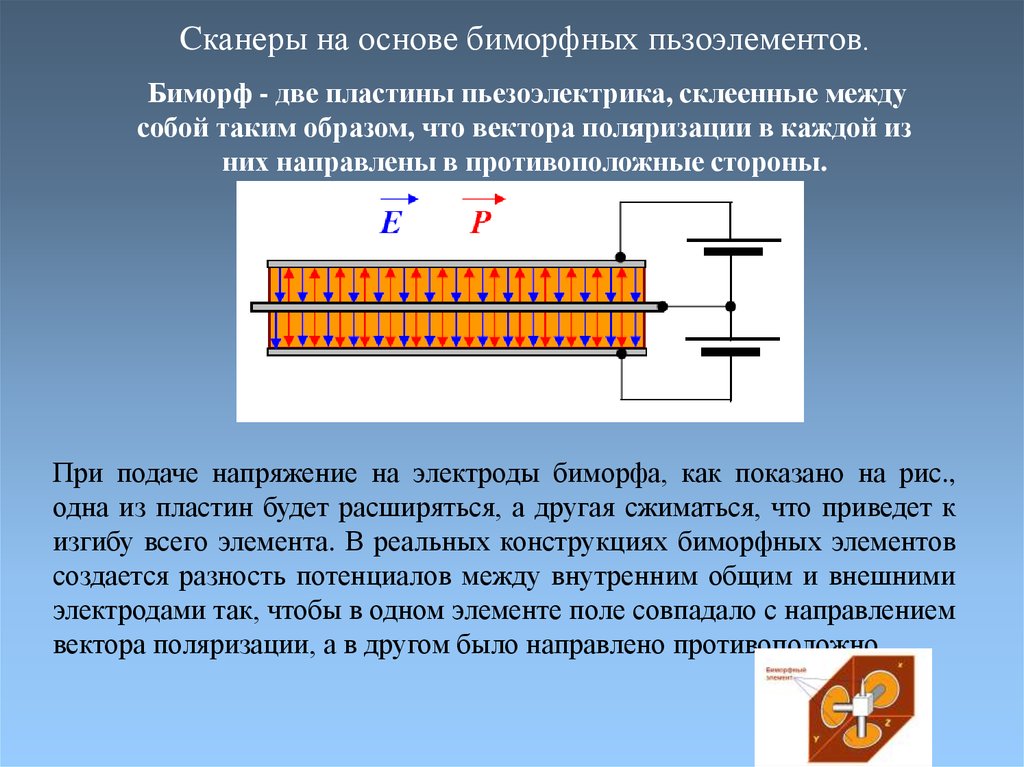
Cканеры на основе биморфных пьзоэлементов.Биморф - две пластины пьезоэлектрика, склеенные между
собой таким образом, что вектора поляризации в каждой из
них направлены в противоположные стороны.
При подаче напряжение на электроды биморфа, как показано на рис.,
одна из пластин будет расширяться, а другая сжиматься, что приведет к
изгибу всего элемента. В реальных конструкциях биморфных элементов
создается разность потенциалов между внутренним общим и внешними
электродами так, чтобы в одном элементе поле совпадало с направлением
вектора поляризации, а в другом было направлено противоположно.
13.
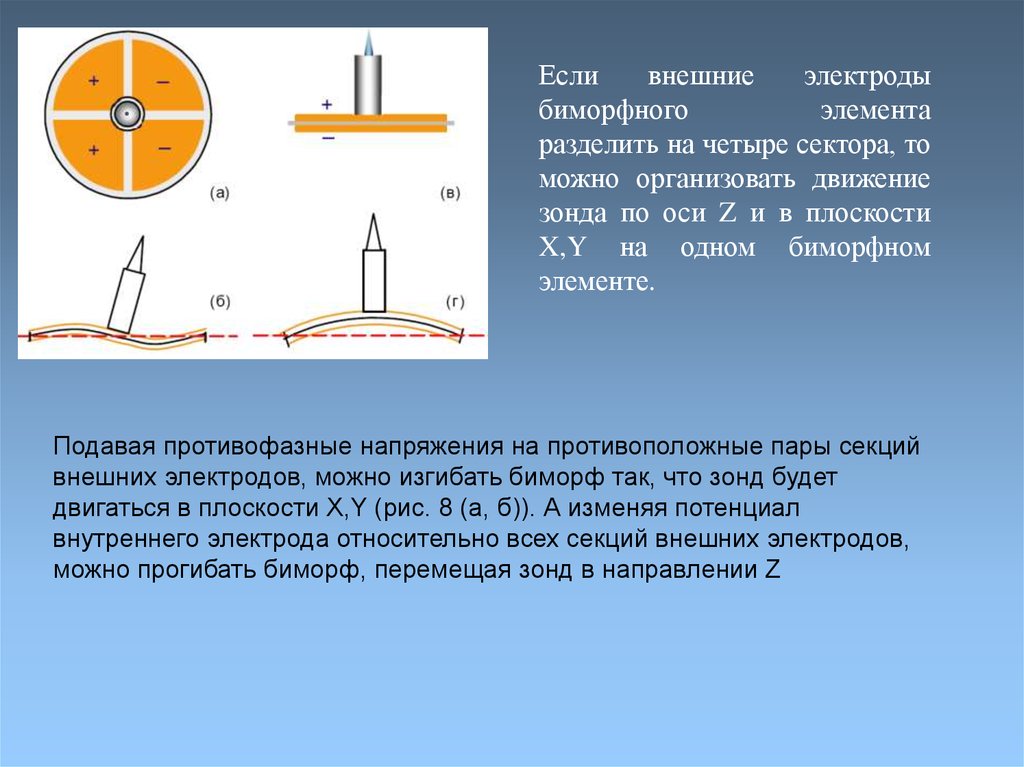
Есливнешние
электроды
биморфного
элемента
разделить на четыре сектора, то
можно организовать движение
зонда по оси Z и в плоскости
X,Y на одном биморфном
элементе.
Подавая противофазные напряжения на противоположные пары секций
внешних электродов, можно изгибать биморф так, что зонд будет
двигаться в плоскости X,Y (рис. 8 (а, б)). А изменяя потенциал
внутреннего электрода относительно всех секций внешних электродов,
можно прогибать биморф, перемещая зонд в направлении Z
14.
ЗондРастровое сканирование
с точностью смещения ± 0.05 Å
15.
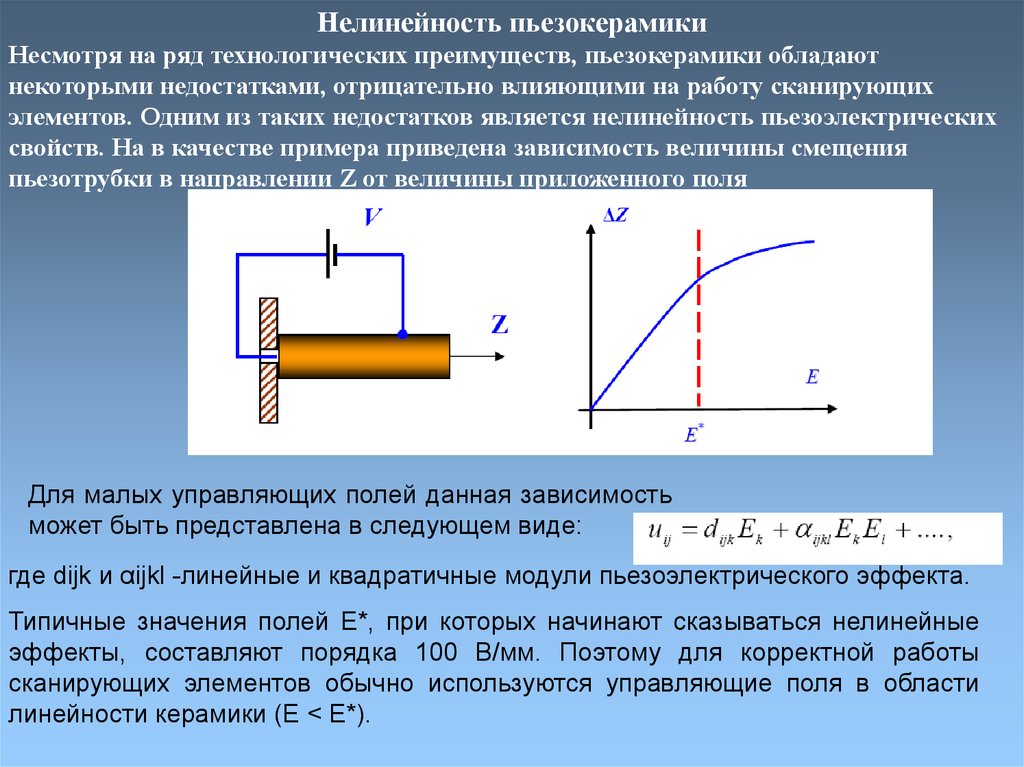
Нелинейность пьезокерамикиНесмотря на ряд технологических преимуществ, пьезокерамики обладают
некоторыми недостатками, отрицательно влияющими на работу сканирующих
элементов. Одним из таких недостатков является нелинейность пьезоэлектрических
свойств. На в качестве примера приведена зависимость величины смещения
пьезотрубки в направлении Z от величины приложенного поля
Для малых управляющих полей данная зависимость
может быть представлена в следующем виде:
где dijk и αijkl -линейные и квадратичные модули пьезоэлектрического эффекта.
Типичные значения полей E*, при которых начинают сказываться нелинейные
эффекты, составляют порядка 100 В/мм. Поэтому для корректной работы
сканирующих элементов обычно используются управляющие поля в области
линейности керамики (E < E*).
16.
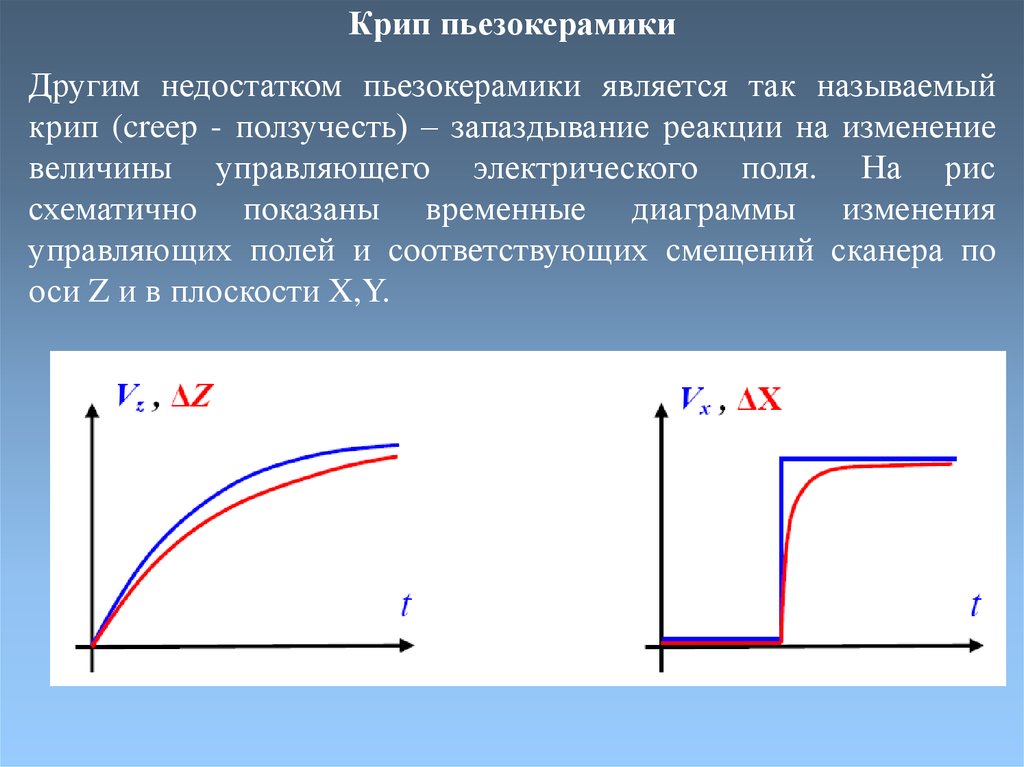
Крип пьезокерамикиДругим недостатком пьезокерамики является так называемый
крип (creep - ползучесть) – запаздывание реакции на изменение
величины управляющего электрического поля. На рис
схематично показаны временные диаграммы изменения
управляющих полей и соответствующих смещений сканера по
оси Z и в плоскости X,Y.
17.
Гистерезис пьезокерамики. Еще одним недостаткомпьезокерамик является неоднозначность зависимости
удлинения от направления изменения электрического поля
(гистерезис).
Это приводит к тому, что при одних и тех же управляющих напряжениях
пьезокерамика оказывается в различных точках траектории в зависимости от
направления движения (рис. 11). Для исключения искажений СЗМ
изображений, обусловленных гистерезисом пьезокерамики, регистрацию
информации при сканировании образцов производят только на одной из ветвей
зависимости ΔZ = f (V ).
18.
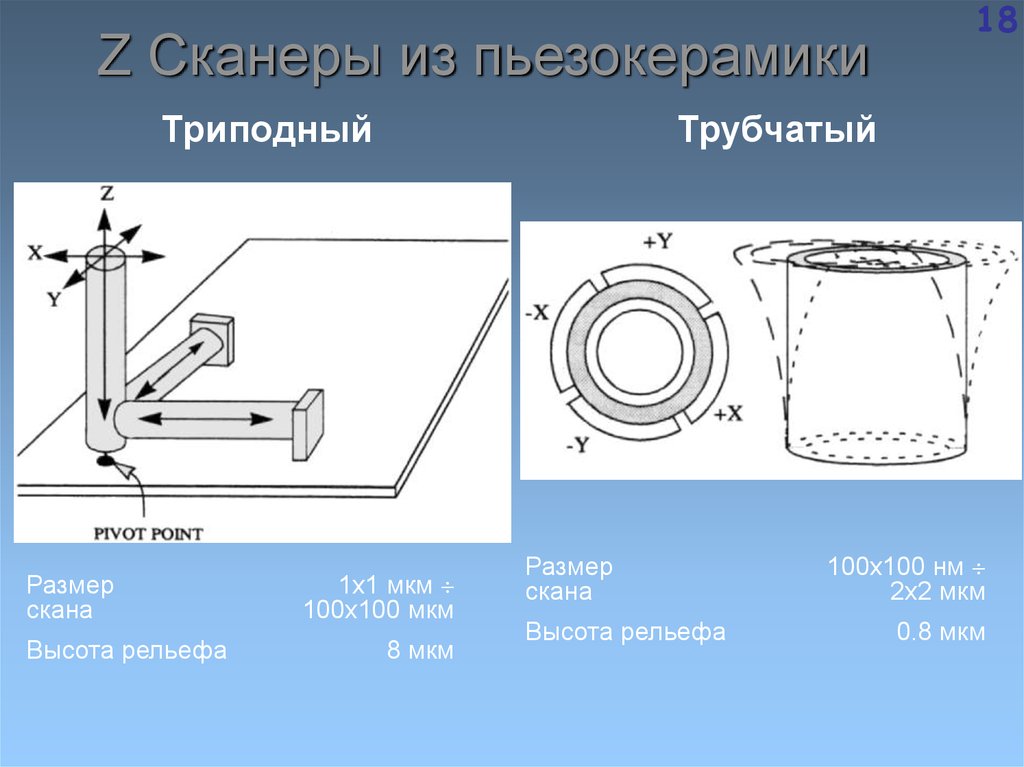
Z Сканеры из пьезокерамикиТриподный
Размер
скана
Высота рельефа
18
Трубчатый
1х1 мкм
100х100 мкм
8 мкм
Размер
скана
Высота рельефа
100х100 нм
2х2 мкм
0.8 мкм
19.
Особенности использования пьезокерамики для z сканеровТемпературный дрейф – изменение свойств пезокерамики при изменении
температуры. Для контроля – термостатирование, помещение прибора в
вакуум.
Методы устранения нелинейность:
Постобработка
– предварительная калибровка для определения параметров нелинейности
с последующей компьютерной обработкой и вычитанием эффекта
нелинейности.
Аппаратные
– использование интерференционных методов для определения положения
зонда (точность до 0.1 нм.
-использование линейных дифференциальных трансформаторов для
контроля перемещения зонда (точность 1 нм)
- использование 4-х секционного фотодиода для определения положения
зонда.
Активные – включение перечисленных устройств в систему обратной связи.
20.
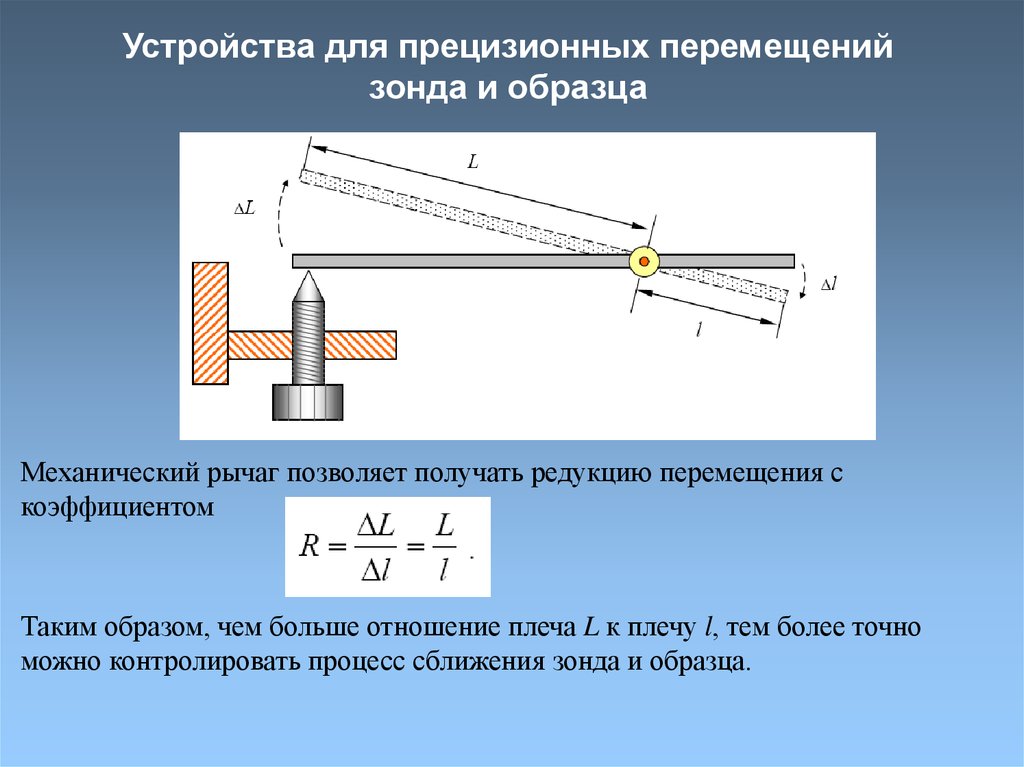
Устройства для прецизионных перемещенийзонда и образца
Механический рычаг позволяет получать редукцию перемещения с
коэффициентом
Таким образом, чем больше отношение плеча L к плечу l, тем более точно
можно контролировать процесс сближения зонда и образца.
21.
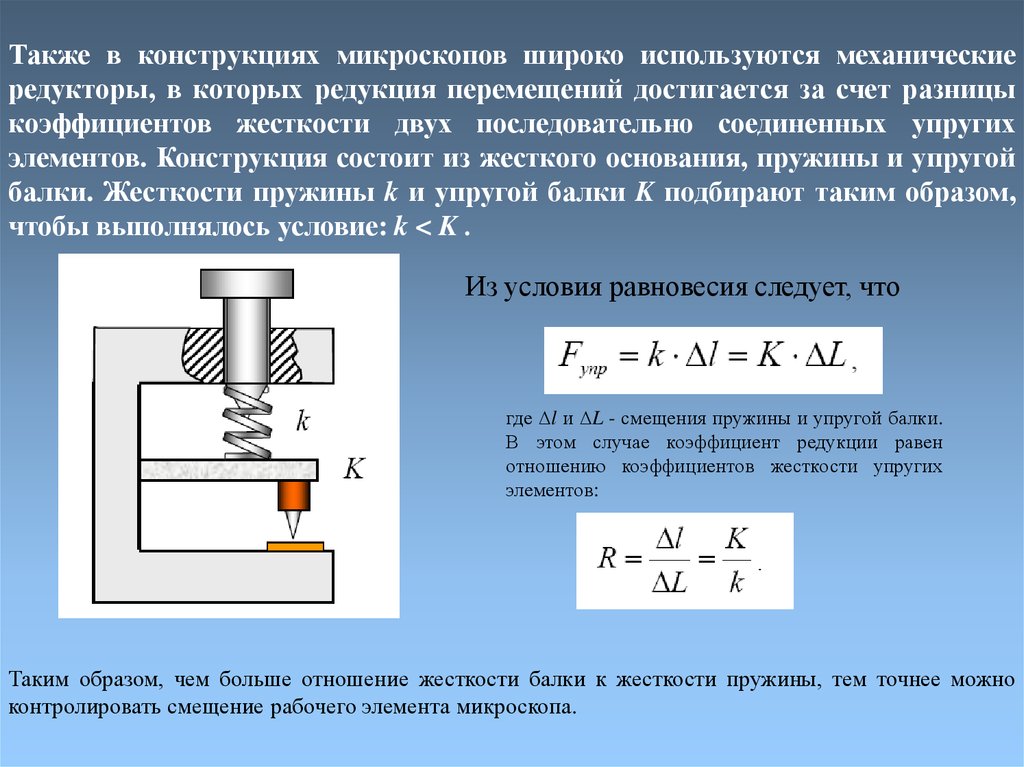
Также в конструкциях микроскопов широко используются механическиередукторы, в которых редукция перемещений достигается за счет разницы
коэффициентов жесткости двух последовательно соединенных упругих
элементов. Конструкция состоит из жесткого основания, пружины и упругой
балки. Жесткости пружины k и упругой балки K подбирают таким образом,
чтобы выполнялось условие: k < K .
Из условия равновесия следует, что
где Δl и ΔL - смещения пружины и упругой балки.
В этом случае коэффициент редукции равен
отношению коэффициентов жесткости упругих
элементов:
Таким образом, чем больше отношение жесткости балки к жесткости пружины, тем точнее можно
контролировать смещение рабочего элемента микроскопа.
22.
Шаговые электродвигателиШаговые электродвигатели (ШЭД) представляют собой
электромеханические
устройства,
которые
преобразуют
электрические импульсы в дискретные механические
перемещения (дискретное вращение ротора). Важным
преимуществом шаговых электродвигателей является то, что
они обеспечивают однозначную зависимость положения ротора
от входных импульсов тока, так что угол поворота ротора
определяется числом управляющих импульсов. В ШЭД
вращающий момент создается магнитными потоками,
создаваемыми полюсами статора и ротора, которые
соответствующим образом ориентированы друг относительно
друга
23.
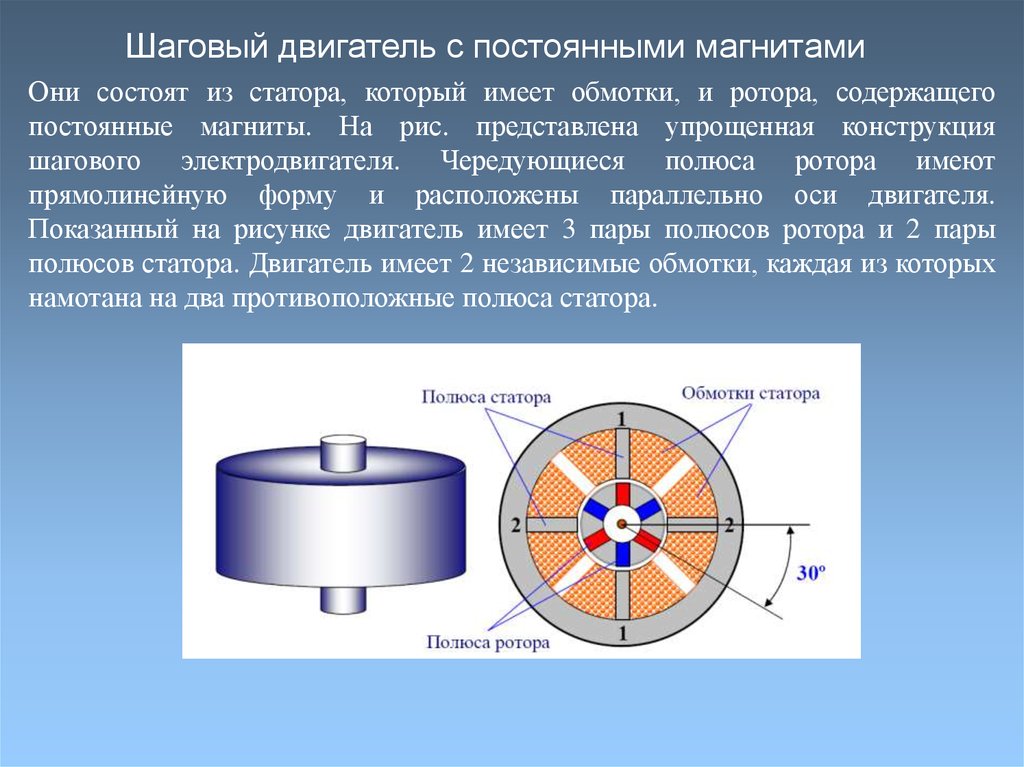
Шаговый двигатель с постоянными магнитамиОни состоят из статора, который имеет обмотки, и ротора, содержащего
постоянные магниты. На рис. представлена упрощенная конструкция
шагового электродвигателя. Чередующиеся полюса ротора имеют
прямолинейную форму и расположены параллельно оси двигателя.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары
полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых
намотана на два противоположные полюса статора.
24. Пассивная защита СЗМ от вибраций
низкая резонанснаячастота системы
виброзащиты и высокая
резонансная частота
СЗМ-узла
↓
наилучшая защита от
внешних механических
вибраций
24
25. Схема активной защиты СЗМ от вибраций
2526. Принципы защиты СЗМ от термо- расширений
Принципы защиты СЗМ от терморасширений26
• симметризация
конструкции
• включение
компенсирующих
элементов
• применение
материалов с
низким КТР
27. Представление полученной информации
АВ
Представление полученных данных в виде яркостной или цветной 2D
карты (А) или в виде 3D изображения с виртуальной подсветкой (В)
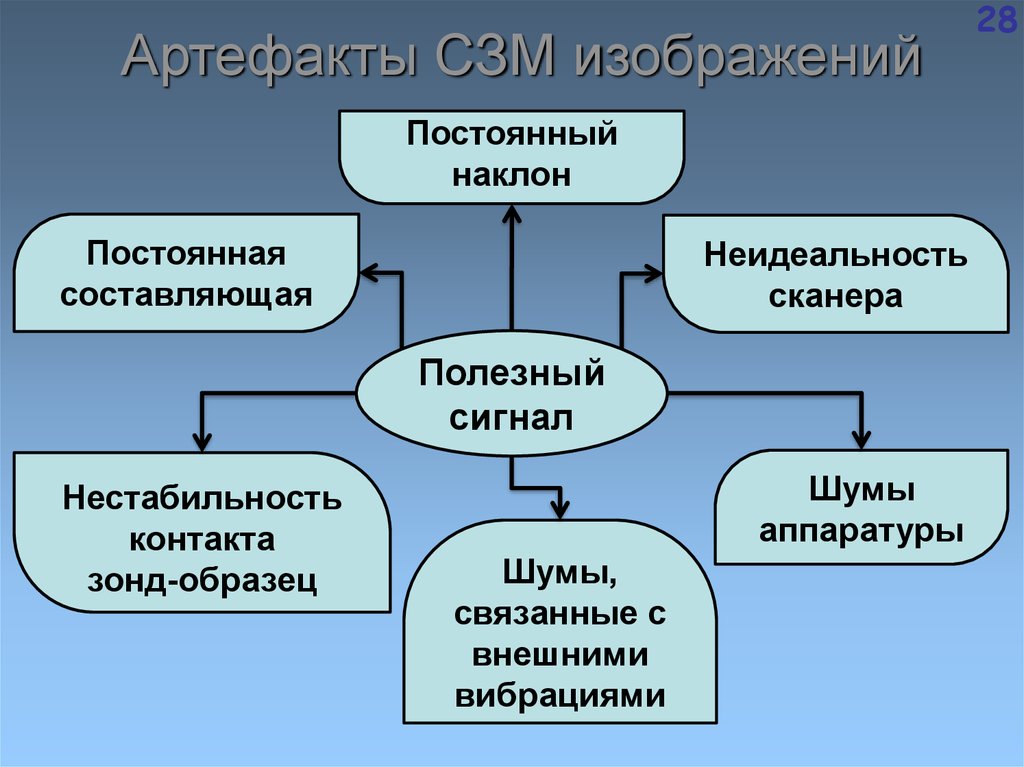
28.
Артефакты СЗМ изображенийПостоянный
наклон
Постоянная
составляющая
Неидеальность
сканера
Полезный
сигнал
Нестабильность
контакта
зонд-образец
Шумы
аппаратуры
Шумы,
связанные с
внешними
вибрациями
28
29.
Артефакты СЗМ изображенийМетоды устранения артефактов
• Вычитание постоянной составляющей
• Вычитание поверхности 2ого порядка
неидеальность сканера
• Усреднение по строкам
• Фильтрация СЗМ изображений
(например, медианная фильтрация)
устранение шумовой составляющей
• Фурье фильтрация СЗМ изображений
Исследование наноматериалов методами сканирующей зондовой микроскопии
29
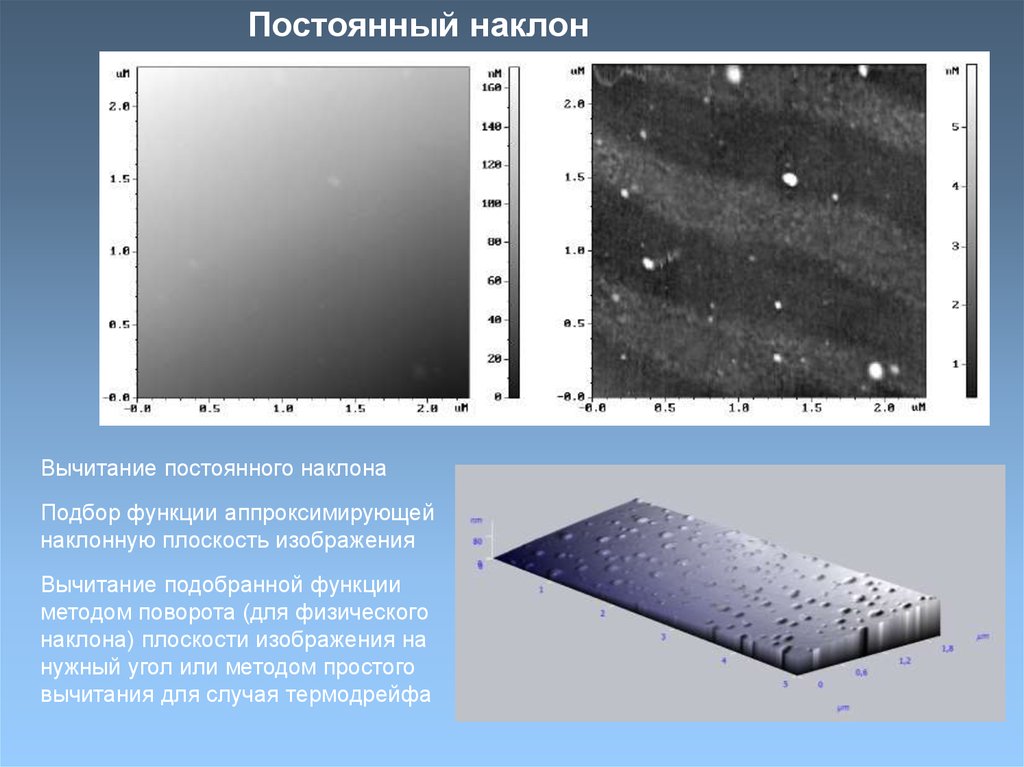
30.
Постоянный наклонВычитание постоянного наклона
Подбор функции аппроксимирующей
наклонную плоскость изображения
Вычитание подобранной функции
методом поворота (для физического
наклона) плоскости изображения на
нужный угол или методом простого
вычитания для случая термодрейфа
31.
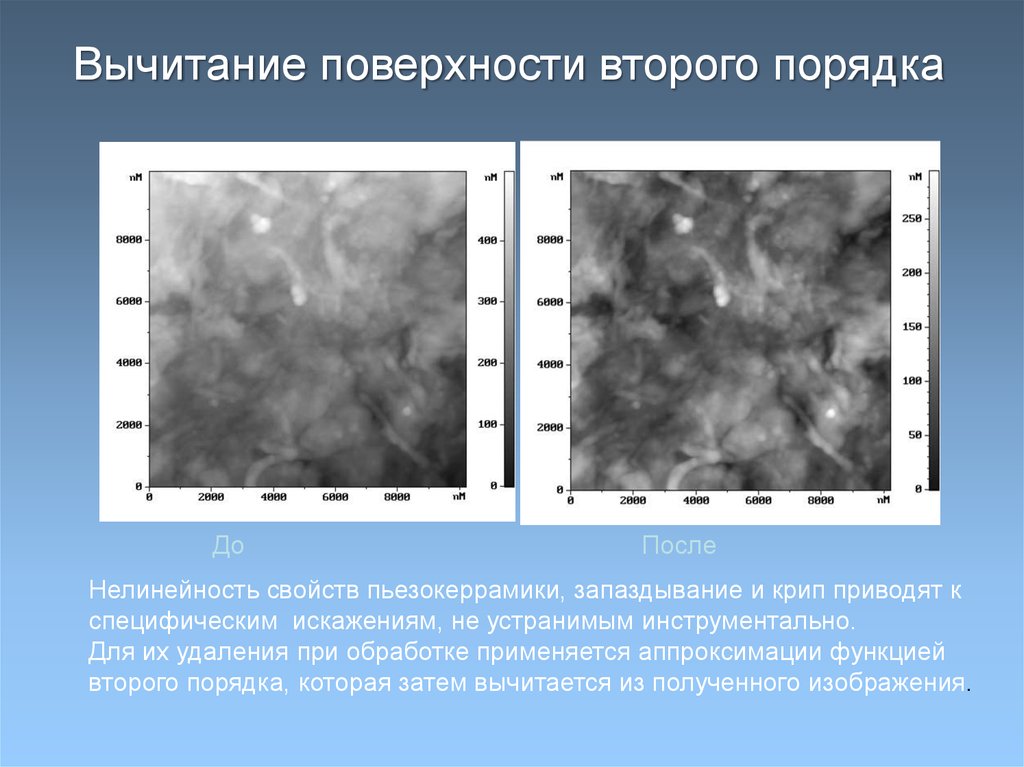
Вычитание поверхности второго порядкаДо
После
Нелинейность свойств пьезокеррамики, запаздывание и крип приводят к
специфическим искажениям, не устранимым инструментально.
Для их удаления при обработке применяется аппроксимации функцией
второго порядка, которая затем вычитается из полученного изображения.
32.
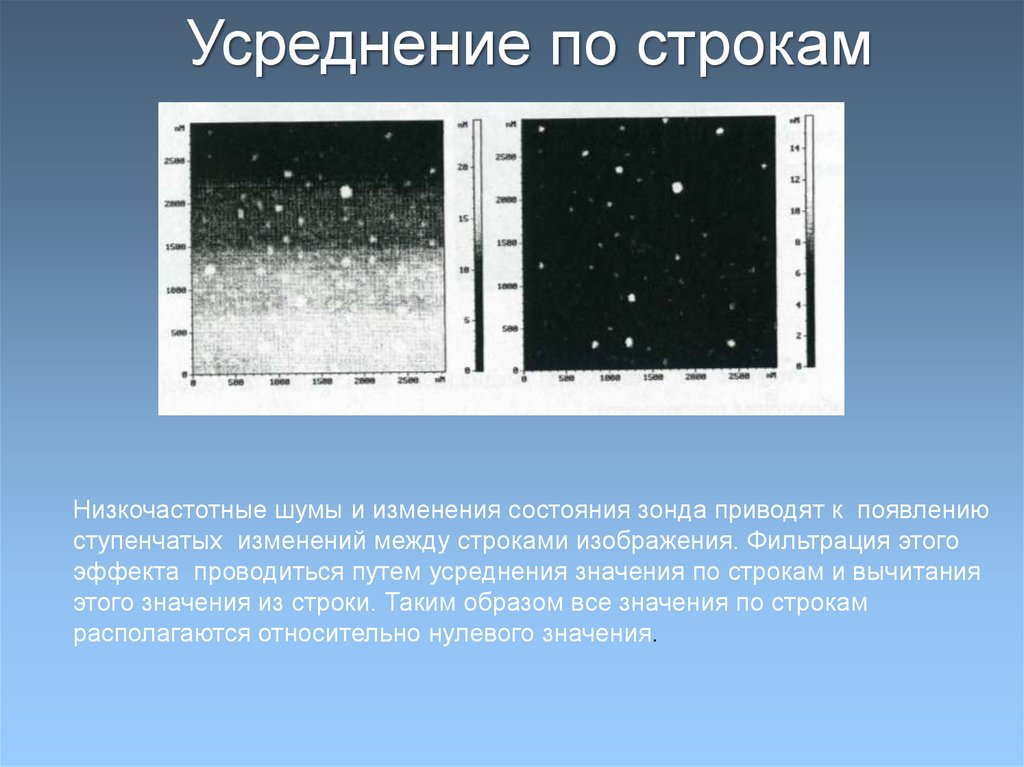
Усреднение по строкамНизкочастотные шумы и изменения состояния зонда приводят к появлению
ступенчатых изменений между строками изображения. Фильтрация этого
эффекта проводиться путем усреднения значения по строкам и вычитания
этого значения из строки. Таким образом все значения по строкам
располагаются относительно нулевого значения.
33.
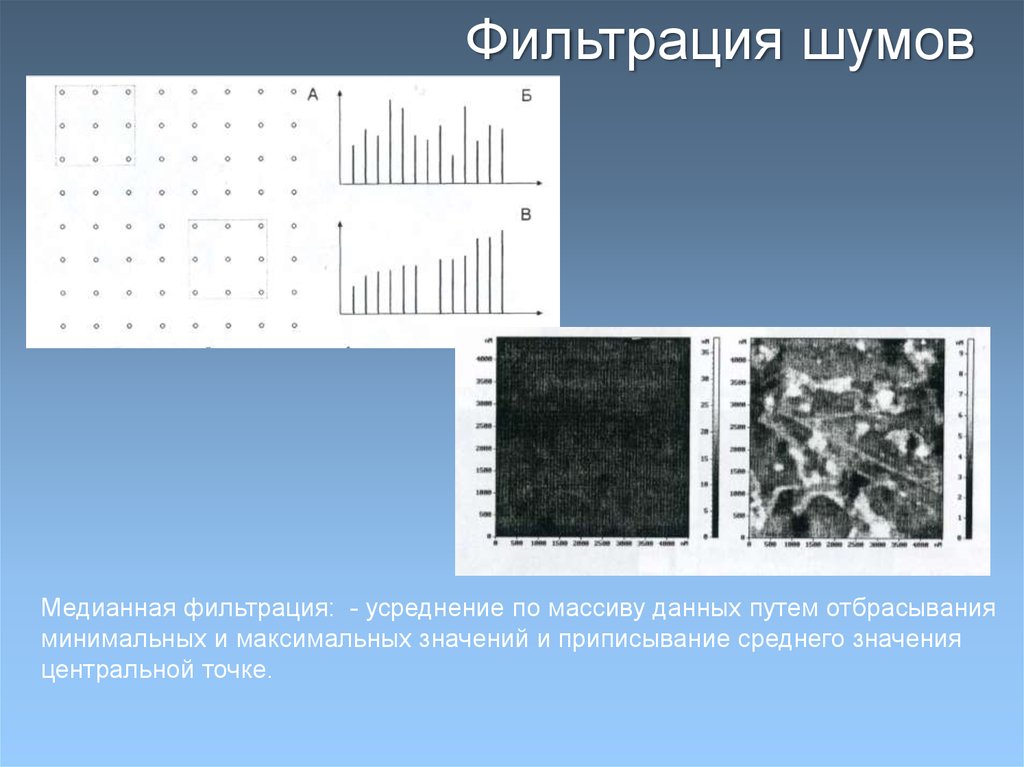
Фильтрация шумовМедианная фильтрация: - усреднение по массиву данных путем отбрасывания
минимальных и максимальных значений и приписывание среднего значения
центральной точке.
34.
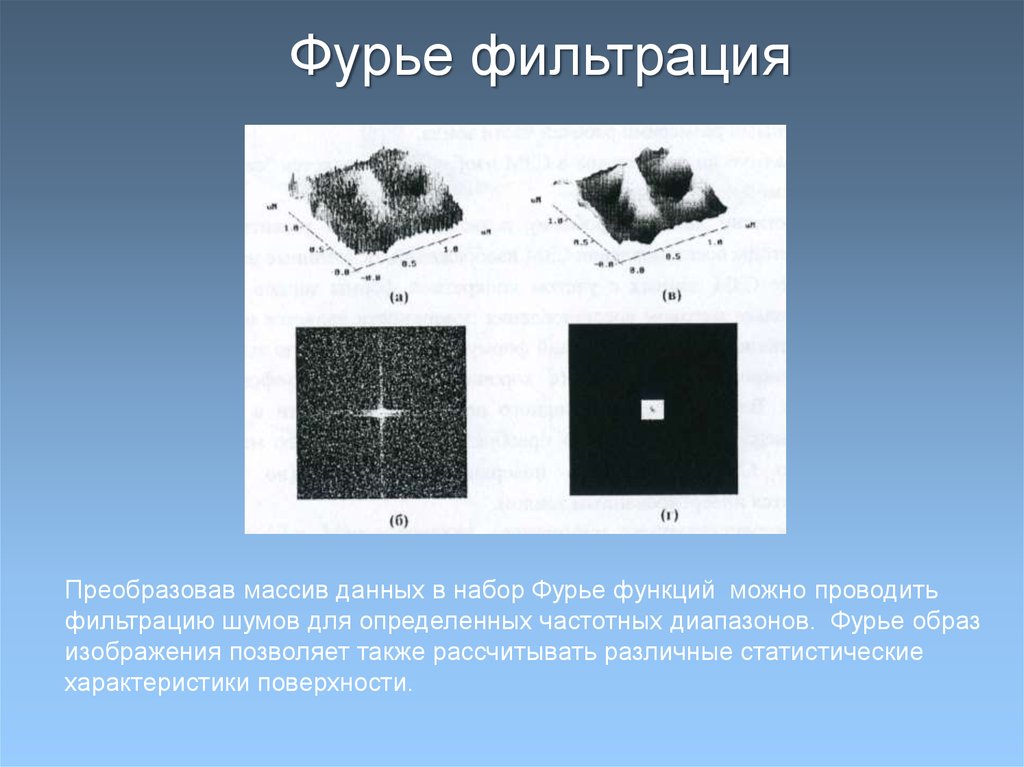
Фурье фильтрацияПреобразовав массив данных в набор Фурье функций можно проводить
фильтрацию шумов для определенных частотных диапазонов. Фурье образ
изображения позволяет также рассчитывать различные статистические
характеристики поверхности.
35.
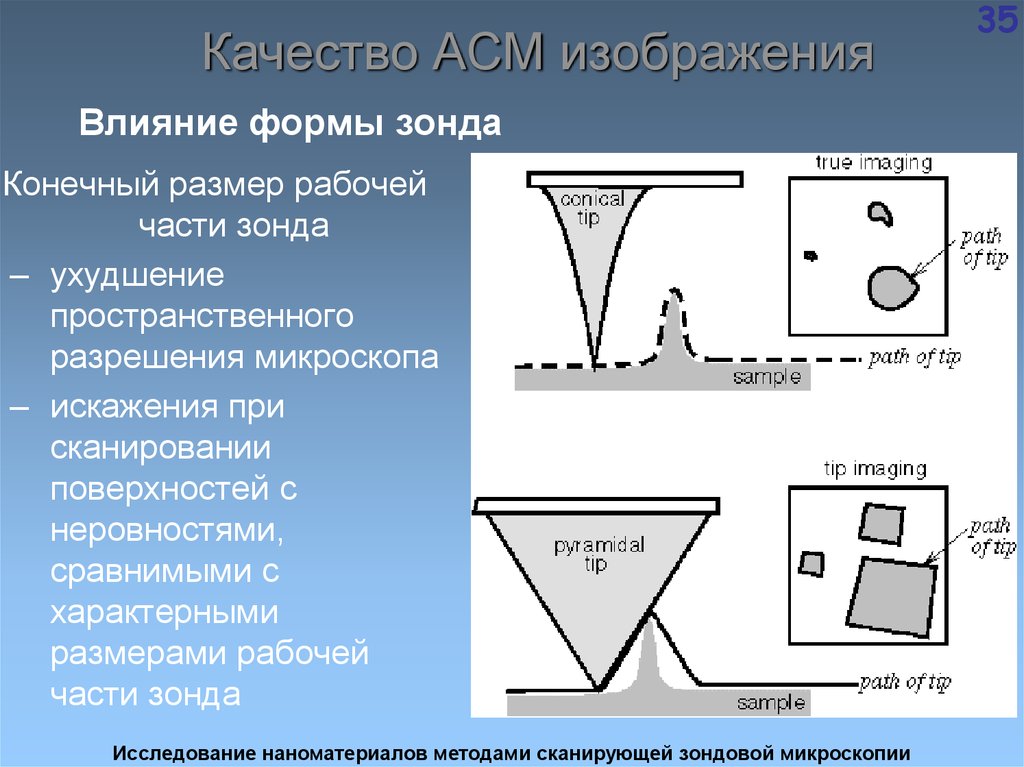
Качество АСМ изображенияВлияние формы зонда
Конечный размер рабочей
части зонда
– ухудшение
пространственного
разрешения микроскопа
– искажения при
сканировании
поверхностей с
неровностями,
сравнимыми с
характерными
размерами рабочей
части зонда
Исследование наноматериалов методами сканирующей зондовой микроскопии
35
36.
Восстановление поверхностиМетод численной деконволюции
• Обратное преобразование
– СЗМ изображение поверхности численно
«сканируется» инвертированным зондом
• Форма зонда
– определяется экспериментально
сканированием тестовых структур или по
тестовым изображениям в SEM
Исследование наноматериалов методами сканирующей зондовой микроскопии
36