



 electronics
electronics industry
industrySimilar presentations:










Разработка шагового электропривода на базе одноименно – полюсного индукторного двигателя
1.
Нижегородский государственный технический университет им. Р.Е АлексееваКафедра «Теоретическая и общая электротехника»
Зимин Андрей Юрьевич
РАЗРАБОТКА ШАГОВОГО ЭЛЕКТРОПРИВОДА НА БАЗЕ ОДНОИМЕННО –
ПОЛЮСНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ ДЛЯ ВЫСОКОТОЧНЫХ СИСТЕМ
ПОЗИЦИОНИРОВАНИЯ РЕГУЛИРУЮЩИХ ОРГАНОВ
05.09.03 – электротехнические комплексы и системы
Диссертация на соискание ученой степени кандидата технических наук
Научный руководитель: д.т.н, проф. Смирнов А.Ю.
Нижний Новгород, 2019
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
2.
АктуальностьШирокое применение в технике
военной
медицинской
авиационной и
космической
ядерной
энергетике
офисном
оборудовании
Определяющие требования
необходимость сохранения
обеспечение
достигнутого углового
максимальной точности
положения ротора после
позиционирования
отключения
питания
рабочего
This document
must be disclosed
only to authorized individuals. Any reproduction and/or disclosure must be subject
to information органа
Owner prior consent.
3.
АктуальностьПроблемами теории, расчёта, проектирования и исследований электропривода на базе
синхронных машин с постоянными магнитами для автоматических устройств в разное
время занимались: Ю.С. Чечет, А.Г. Иосифьян, В.В. Хрущёв, А.И. Бертинов, В.А.
Ратмиров, Б.А. Ивоботенко, Д.В. Свечарник, Е.В. Арменский, Д.А. Бут, В.В. Апсид, В.А.
Балагуров, Ф.Ф. Галтеев, Б.Х. Коник, Ф.Н. Сарапулов .
В настоящее время исследованиями в области синхронных машин с постоянными
магнитами различного назначения занимаются коллективы учёных ряда образовательных и
исследовательских институтов: НИУ МЭИ (Москва), ВНИИЭМ (Москва), УрФу (УПИ,
Екатеринбург), НГТУ (Новосибирск), ЮРГПУ (НПИ) им. М.И. Платова (Новочеркасск),
ЮУрГу (Челябинск) и др.
Но несмотря на накопленный опыт, пока отсутствуют развёрнутые методики
проектирования таких двигателей с учётом инерционных параметров шагового привода,
нет методик поверочного расчёта некоторых их конструктивных модификаций, не
сводящихся к плоским (двухмерным) моделям.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
4.
Цель и задачиОбъект
исследования -
Шаговый электропривод с одноимённо-полюсными индукторными
двигателями
с
постоянными
магнитами
на
роторе,
предназначенными для работы в механизмах с высокой точностью
позиционирования рабочих органов, достигаемой за счёт большого
устойчивых положений ротора на оборот.
Предмет
исследования -
Методы проектирования, поверочного расчёта и режимы работы
шагового
электропривода
с
одноимённо-полюсными
индукторными двигателями с постоянными магнитами на роторе.
Цель -
- Разработка методики проектирования одноимённо-полюсных
индукторных двигателей с постоянными магнитами на роторе в
составе шагового электропривода.
- Проверка результатов проектирования путём сопоставления с
экспериментальными данными и результатами поверочных
расчётов.
- Создание математических моделей для исследования работы
индукторных двигателей в составе шагового привода.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
5.
Цель и задачиЗадачи:
1. Создание методики и алгоритма проектирования одноимённо-полюсных
индукторных двигателей с постоянными магнитами на роторе в составе шагового
электропривода.
2. Разработка компьютерных программ генерации 3D моделей одноимённополюсных индукторных двигателей, для проверки результатов проектирования на
уточнённых моделях поверочного расчёта, с использованием современных методов
математического анализа и программного обеспечения (метода конечных элементов и
реализующих этот метод пакетов прикладных программ).
3. Оптимизация параметров зубцовой зоны и электромагнитных нагрузок
рассматриваемой машины по одному из критериев минимизации габаритов, массы и
расхода активных материалов.
4.
Разработка
математических
моделей
шагового
электропривода,
предназначенных для поиска наиболее рациональных режимов питания
спроектированного двигателя от преобразователя частоты с источником (инвертором)
напряжения.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
6.
Научная новизна1. Впервые разработана методика проектирования одноимённо-полюсных
индукторных двигателей с учётом момента инерции подвижных масс шагового
электропривода.
2. Разработана компьютерная программа генерации 3D сеточных моделей для
расчёта одноимённо-полюсных индукторных двигателей методом конечных
элементов, обеспечивающим наиболее глубокую детализацию электромагнитных
процессов при проведении поверочных расчётов.
3. Выявлены оптимальные соотношения параметров зубцовой зоны и
электромагнитных нагрузок индукторного двигателя с постоянными магнитами на
роторе, при которых достигаются минимальные габариты, масса или расход активных
материалов, в частности магнитотвёрдых материалов постоянных магнитов.
4. Разработана математическая модель шагового электропривода на базе
индукторной машины с постоянными магнитами, предназначенная для поиска
наиболее рациональных режимов питания спроектированного двигателя от
преобразователя частоты с источником (инвертором) напряжения.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
7.
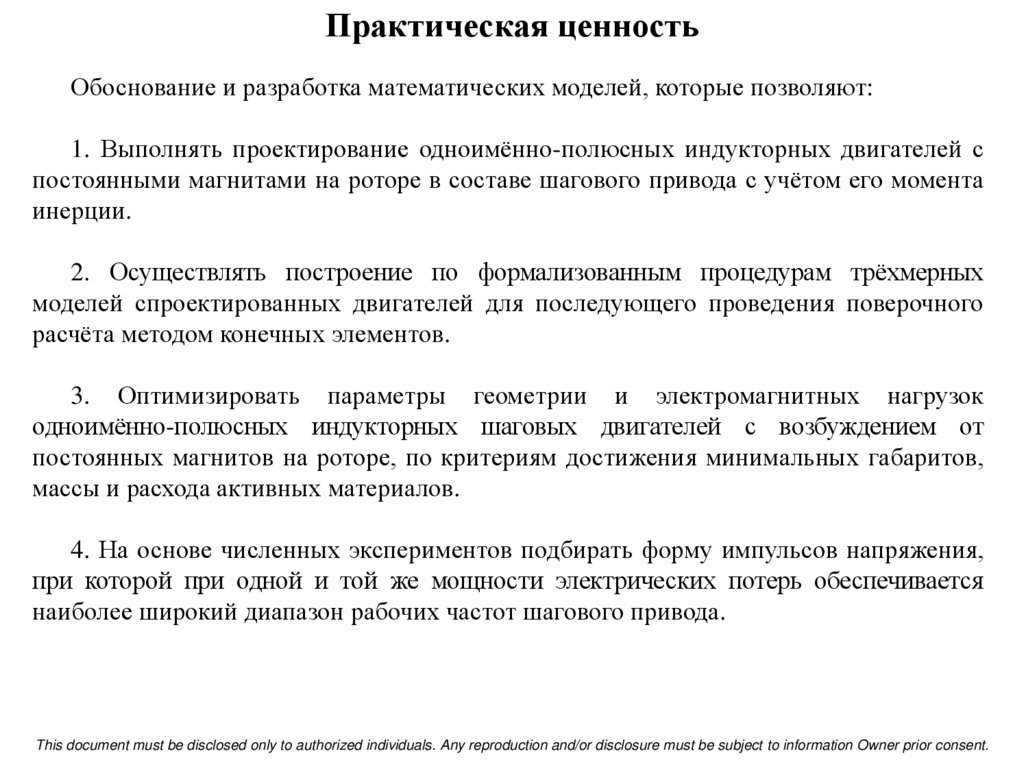
Практическая ценностьОбоснование и разработка математических моделей, которые позволяют:
1. Выполнять проектирование одноимённо-полюсных индукторных двигателей с
постоянными магнитами на роторе в составе шагового привода с учётом его момента
инерции.
2. Осуществлять построение по формализованным процедурам трёхмерных
моделей спроектированных двигателей для последующего проведения поверочного
расчёта методом конечных элементов.
3. Оптимизировать параметры геометрии и электромагнитных нагрузок
одноимённо-полюсных индукторных шаговых двигателей с возбуждением от
постоянных магнитов на роторе, по критериям достижения минимальных габаритов,
массы и расхода активных материалов.
4. На основе численных экспериментов подбирать форму импульсов напряжения,
при которой при одной и той же мощности электрических потерь обеспечивается
наиболее широкий диапазон рабочих частот шагового привода.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
8.
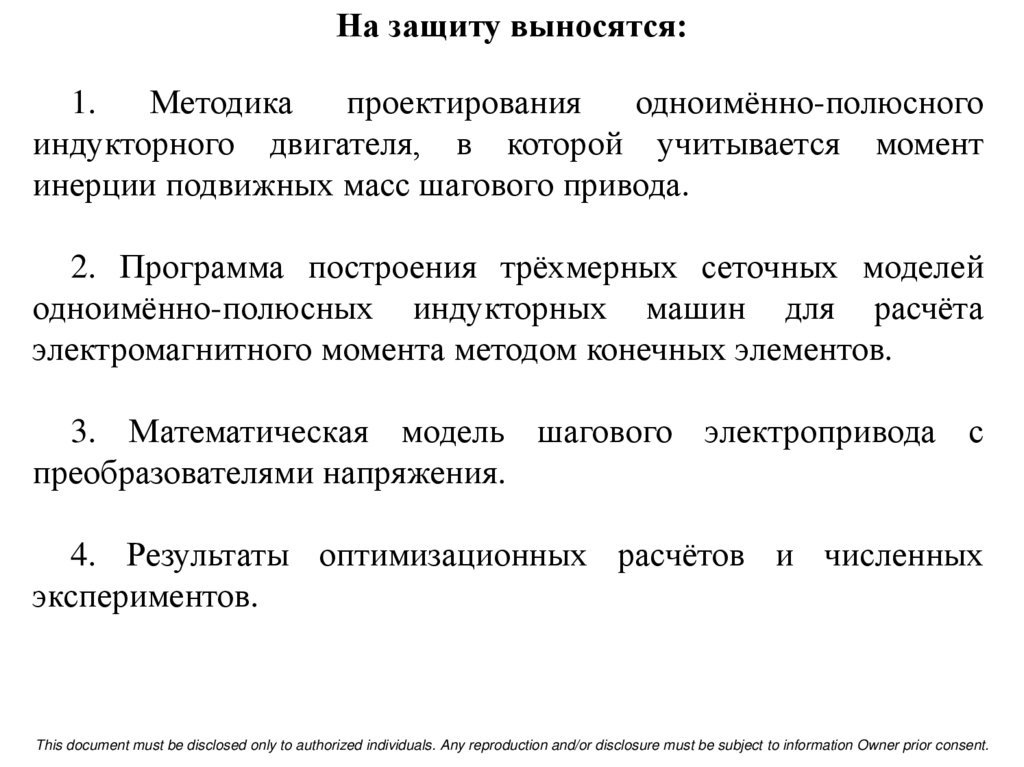
На защиту выносятся:1.
Методика
проектирования
одноимённо-полюсного
индукторного двигателя, в которой учитывается момент
инерции подвижных масс шагового привода.
2. Программа построения трёхмерных сеточных моделей
одноимённо-полюсных индукторных машин для расчёта
электромагнитного момента методом конечных элементов.
3. Математическая модель шагового электропривода с
преобразователями напряжения.
4. Результаты оптимизационных расчётов и численных
экспериментов.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
9.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
10.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
11.
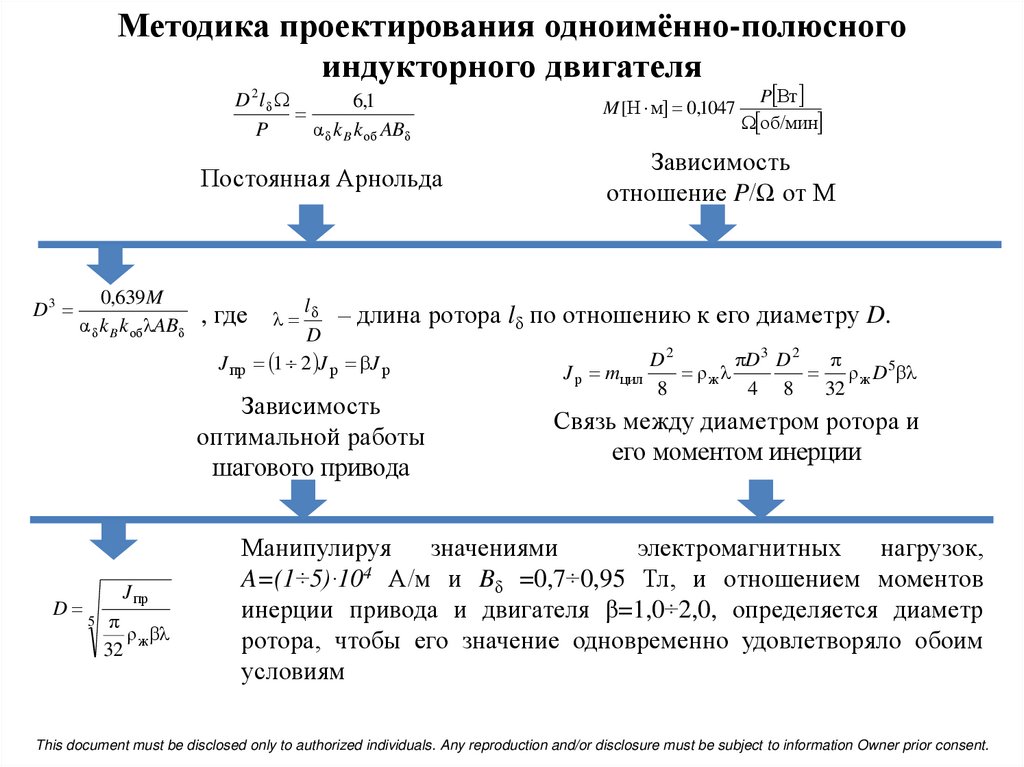
Методика проектирования одноимённо-полюсногоиндукторного двигателя
D 2 lδ
6,1
P
α δ k B k об ABδ
M [Н м] 0,1047
Постоянная Арнольда
D3
0,639 M
α δ k B k об λABδ
, где
J пр
lδ
– длина
D
1 2 J р βJ р
λ
Зависимость
оптимальной работы
шагового привода
D
J пр
5
π
ρ ж βλ
32
P Вт
об/мин
Зависимость
отношение P/Ω от М
ротора lδ по отношению к его диаметру D.
J р mцил
D2
πD 3 D 2
π
ρж λ
ρ ж D 5βλ
8
4 8
32
Связь между диаметром ротора и
его моментом инерции
Манипулируя
значениями
электромагнитных
нагрузок,
A=(1÷5)·104 А/м и Bδ =0,7÷0,95 Тл, и отношением моментов
инерции привода и двигателя β=1,0÷2,0, определяется диаметр
ротора, чтобы его значение одновременно удовлетворяло обоим
условиям
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
12.
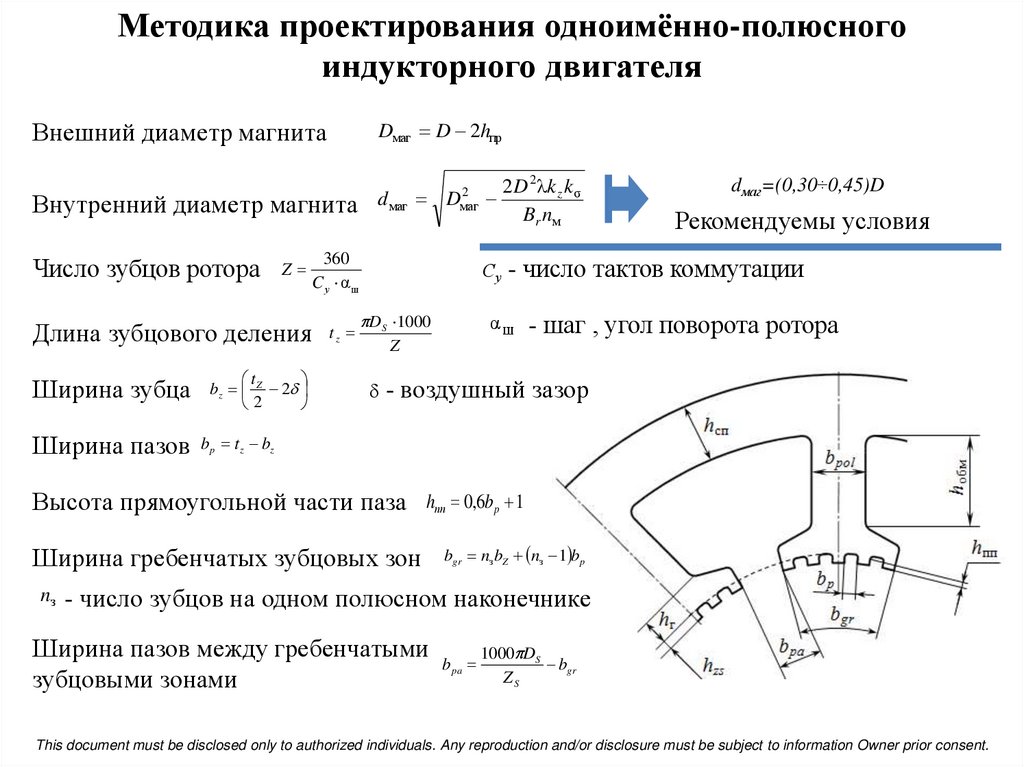
Методика проектирования одноимённо-полюсногоиндукторного двигателя
Внешний диаметр магнита
Dмаг D 2hпр
Внутренний диаметр магнита
d маг
Число зубцов ротора
Z
360
C у αш
Длина зубцового деления
Ширина зубца
Ширина пазов
t
bz Z 2
2
tz
2 D 2 λk z kσ
Br nм
Су
DS 1000
dмаг=(0,30÷0,45)D
Рекомендуемы условия
- число тактов коммутации
αш
- шаг , угол поворота ротора
Z
δ
- воздушный зазор
b p t z bz
Высота прямоугольной части паза
hпп 0,6b p 1
Ширина гребенчатых зубцовых зон
nз
2
Dмаг
bgr nзbZ nз 1 b p
- число зубцов на одном полюсном наконечнике
Ширина пазов между гребенчатыми
зубцовыми зонами
b pa
1000 DS
bgr
ZS
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
13.
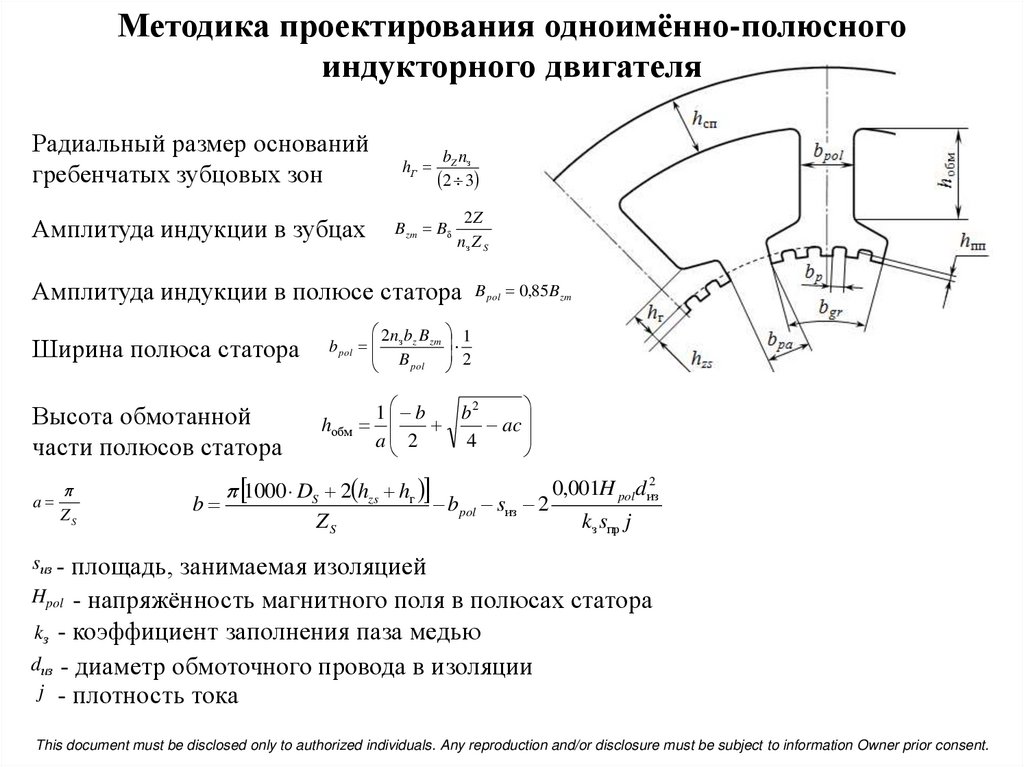
Методика проектирования одноимённо-полюсногоиндукторного двигателя
Радиальный размер оснований
гребенчатых зубцовых зон
Амплитуда индукции в зубцах
hГ
bZ nз
2 3
Bzm Bδ
2Z
nз Z S
Амплитуда индукции в полюсе статора
Ширина полюса статора
Высота обмотанной
части полюсов статора
a
ZS
b
B pol 0,85Bzm
2n b B 1
b pol з z zm
B
2
pol
1 b
b2
hобм
ac
a 2
4
1000 DS 2 hzs hг
ZS
bpol sиз 2
0,001H pol d из2
kз sпр j
площадь, занимаемая изоляцией
Hpol - напряжённость магнитного поля в полюсах статора
kз - коэффициент заполнения паза медью
dиз - диаметр обмоточного провода в изоляции
j - плотность тока
sиз -
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
14.
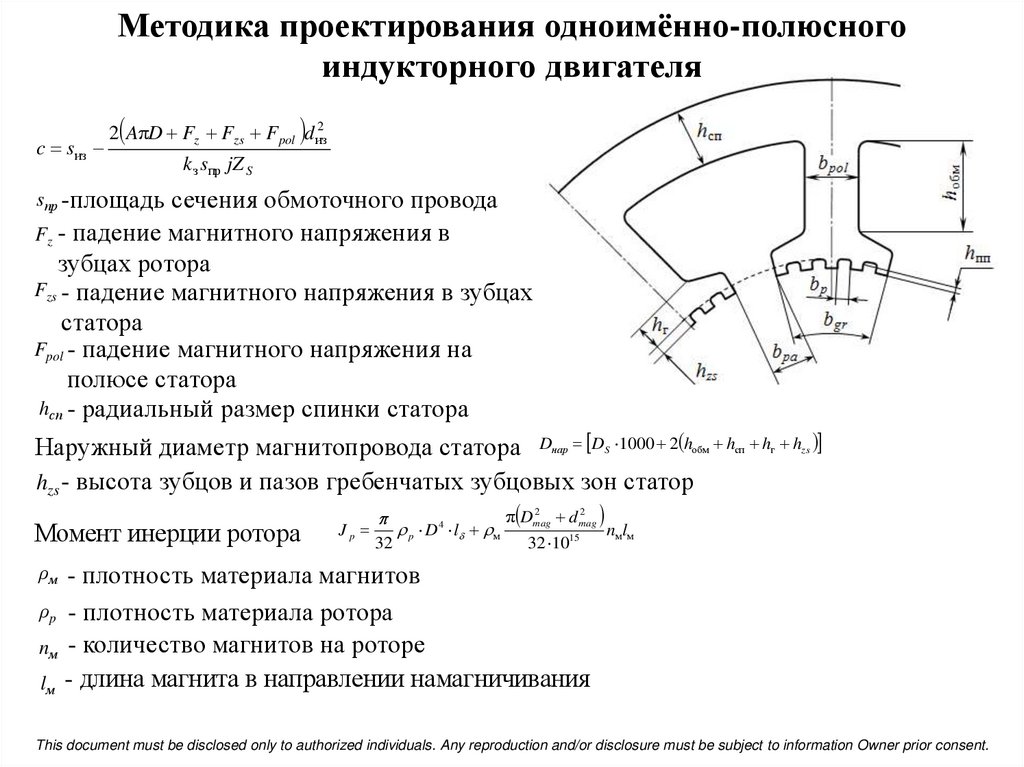
Методика проектирования одноимённо-полюсногоиндукторного двигателя
c sиз
2 AπD Fz Fzs F pol d из2
k з sпр jZ S
сечения обмоточного провода
Fz - падение магнитного напряжения в
зубцах ротора
Fzs - падение магнитного напряжения в зубцах
статора
Fpol - падение магнитного напряжения на
полюсе статора
hсп - радиальный размер спинки статора
Наружный диаметр магнитопровода статора D D 1000 2 h
hzs - высота зубцов и пазов гребенчатых зубцовых зон статор
sпр -площадь
нар
Момент инерции ротора
Jp
32
p D l м
4
2
2
π Dmag
d mag
32 1015
обм
S
hсп hг hzs
n l
м м
- плотность материала магнитов
ρp - плотность материала ротора
nм - количество магнитов на роторе
lм - длина магнита в направлении намагничивания
ρм
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
15.
Методика проектирования одноимённо-полюсногоиндукторного двигателя
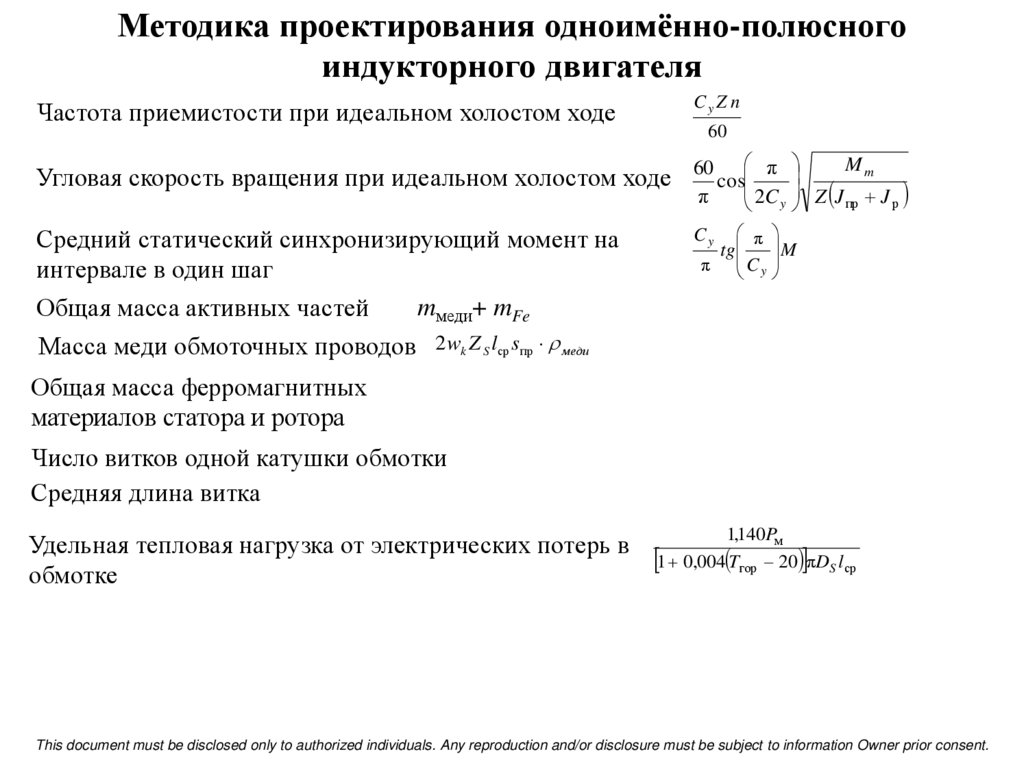
Частота приемистости при идеальном холостом ходе
CyZ n
Угловая скорость вращения при идеальном холостом ходе
Mm
60 π
cos
2C Z J J
π
пр
р
y
60
π
tg
π C y
Средний статический синхронизирующий момент на
интервале в один шаг
mмеди+ mFe
Общая масса активных частей
Cy
M
Масса меди обмоточных проводов 2wk Z S lср sпр м еди
Общая масса ферромагнитных
материалов статора и ротора
Число витков одной катушки обмотки
Средняя длина витка
Удельная тепловая нагрузка от электрических потерь в
обмотке
1,140Pм
1 0,004 Tгор 20 πDS l ср
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
16.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
17.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
18.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
19.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
20.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
21.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
22.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
23.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
24.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
25.
АктуальностьThis document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
26.
Оптимизационные расчеты электродвигателей в составешагового электропривода
Целью оптимизации поставлено достижение одного из следующих результатов:
- минимизация габаритов электромеханического преобразователя (внешнего
диаметра и осевой длины статора);
- минимизация общей массы активных частей или массы обмоточных проводов,
массы постоянных магнитов, по отдельности;
- минимизация потерь в меди обмотки и достижение максимального КПД;
- получение наибольшей частоты приемистости в шаговом приводе.
В качестве переменных проекта используются исходные данные:
- индукция в зазоре Вδ;
- линейная нагрузка А;
- момент инерции ротора относительно момента инерции привода β;
- относительная длина ротора λ;
- число зубцов на поверхности одного полюсного наконечника статора nз.
количество магнитов на роторе nм на роторе.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
27.
Оптимизационные расчеты электродвигателей в составешагового электропривода
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
28.
Оптимизационные расчеты электродвигателей в составешагового электропривода
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
29.
Основные результаты работы1. Разработаны методика и алгоритм проектирования одноимённо-полюсных
индукторных электромеханических преобразователей (двигателей) индукторного типа
с постоянными магнитами на роторе в составе шагового электропривода с привязкой
моменту нагрузки и моменту инерции подвижных масс. Эти двигатели конструктивно
обладают возможностью выполнения мелкого шага, а потому наиболее подходят для
высокоточных систем позиционирования регулирующего органа, а также для привода
механизмов подачи станков с числовым программным управлением.
2. Предложены алгоритмы и программное обеспечение (на встроенном языке
использованного пакета прикладных программ) для поверочного расчёта посредством
МКЭ
электромагнитного
момента
электромеханического
преобразователя
индукторного типа с возбуждением от постоянных магнитов на роторе.
3. Разработана математическая модель шагового электропривода на базе
индукторной машины, предназначенная для подбора рациональных режимов питания
от преобразователя частоты с источником (инвертором) напряжения.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.
30.
Основные результаты работы4.
Предложена
методика
оптимизации
одноимённо-полюсного
электромеханического преобразователя индукторного типа по наиболее важным
характеристикам двигателя и привода.
5. Выполнены оптимизационные расчёты аналогов серийных двигателей для
шагового электропривода, которые позволили в соответствии с расчётными оценками,
сократить массу их активных частей на 37,6% и на 7,4% по сравнению с серийным
двигателем.
This document must be disclosed only to authorized individuals. Any reproduction and/or disclosure must be subject to information Owner prior consent.