

















 industry
industrySimilar presentations:



")





")
Транспортная техника. Железнодорожная автоматика. Магистральный транспорт. Грузовая работа
1.
Транспортная техникаЖелезнодорожная автоматика
Магистральный транспорт
Грузовая работа
Поставка комплексных
систем управления и
информационных систем
для горок и маневровых
районов на
сортировочных станциях
2. Cargo Automation
CARGO AUTOMATIONCargo Automation
Продуманные решения для достижения большей эффективности и
безопасности в грузовых перевозках
Управляющие и информационные системы для формирования поездов
на сортировочных станциях
3. Продукция TS RA D 8 Системы для сортировочных станций
ПРОДУКЦИЯ TS RA D 8СИСТЕМЫ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ
MSR 32
Полностью автоматизированные СУ СС
MSR 32 EOW (DEP)
ЭЦ маневровых районов с
децентрализованным или
централизованным
размещением аппаратуры
MSR 32 TBk
Система управления
замедлителями
MSR 32 RaStw
Система управления
маневровыми маршрутами
в маневровых районах
VICOS CM 500
Информационная
система
ARKOS
Автоматизированные
системы сбора и обработки
информации о вагонах
4. MSR 32 Система для автоматизации сортировочных горок
MSR 32 СИСТЕМА ДЛЯ АВТОМАТИЗАЦИИСОРТИРОВОЧНЫХ ГОРОК
MSR 32 –модульная микропроцессорная
система с открытой архитектурой для
автоматизации сортировочных станций
любого типа
Включает в себя подсистемы управления
стрелками, сигналами, датчиками и
систему радиоуправления маневровым
локомотивом
Позволяет сократить время на
маневровые работы
Обеспечивает высокое качество роспуска
и снижение случаев брака
Легко адаптируется к любым
информационным системам
Пусковые и наладочные работы не
нарушают режима работы станции
Небольшие затраты на техническое
обслуживание
5.
Требования, предъявляемые к системеСистема реализует следующие функции:
ввод информации от путевых датчиков,
информации о положении стрелок, показаниях
горочного и маневровых светофоров,
скоростемеров, весомера, габаритных устройств,
датчиков счета осей в зоне расцепа вагонов,
индикации работы замедлителей, контроле
заполнения путей, количестве срабатываний
аппаратуры
управление централизованными стрелками,
замедлителями, светофорами надвига и
указателями скорости и числом вагонов в отцепах;
реализацию максимальных скоростей роспуска
составов, допускаемых конструкцией горки.
оптимальную скорость соударения отцепов на путях подгорочного парка;
автоматический контроль заполнения сортировочных путей на всю глубину подгорочного
парка;
предоставление пользователю оперативной информации о состоянии объектов и режимах
работы системы;
определение местонахождения подвижных единиц в зоне горки;
поддержание пользовательского интерфейса;
определение заданной скорости выхода отцепа с тормозной позиции;
ведение и предоставление пользователю архивов событий
контроль и диагностика системы
6.
АВТОМАТИЗАЦИЯ СОРТИРОВОЧНЫХПРОЦЕССОВ
Информация о динамических
свойствах отцепов
Weg [m] Beschl [m/s2] Geschw [m/s]
700,00
0,01
1,36
Zeit [s]
383,20
Информация об ожидаемых
производственных ограничениях
Определение решения по топологии
станции и рабочим характеристикам
оборудования станции
Определение потенциалов для
повышения рентабельности в области
инфраструктуры, техники и персонала
-100
-50
Neig [%o]
20
0
50
100
150
200
250
300
350
400
450
500
550
600
650
700
0
50
100
150
200
250
300
350
400
450
500
550
600
DISTANZ [m]
650
700
Zeit
0 [s]
0
-20
-40
DISTANZ [m]
-60
Geschw [m/s]
5.0
Beschl [m/s^2]
0.20
50
4.5
100
0.15
4.0
0.10
0.05
150
3.5
200
0.00
3.0
-0.05
-0.10
-0.15
250
2.5
2.0
300
-0.20
Анализ с использованием программ
Ablaufberg и PC-Simu
1.5
350
1.0
400
-0.25
-0.30
7. Автоматизация сортировочных процессов
АВТОМАТИЗАЦИЯ ПРОЦЕССАРОСПУСКА
Общее представление о процессе расформирования
Прицельно-интервальное торможение
на средней тормозной позиции
с ручным торможением на путях
подгорочного парка
LMR
Прицельно-интервальное торможение на
Второй тормозной позиции и прицельное
торможение на третьей с учетом контроля
заполнения пути
LMR
Прицельно-интервальное торможение на
второй тормозной позиции и
прицельное на третьей с дополнительным
подтормаживанием на подгорочных путях
CR
LMR
CR
Прицельно-интервальное торможение на
2ТП и прицельное на 3ТП с постоянной скоростью
выхода с 3ТП и последующей буксировкой
LMR
CR
HT
Прицельно-интервальное торможение на
2ТП и прицельное на 3ТП с буксировкой с учетом
заполнения пути
LMR
CR
PE
LMR
CR
CE
Прицельно-интервальное торможение на
2ТП и прицельное на 3ТП с разными видами
буксировки для ускорения освобождения
сортировочных путей
Квазинепрерывное торможение
на всей спускной части горки
MR
PE
8. Автоматизация процесса роспуска
СистемаMSR 32: Сбор информации об отцепе
Комплектация исходных данных на горке
для определения
ходовых свойств отцепов:
длина отцепа;
момент отрыва отцепа;
нагрузка на ось;
воздействие ветра;
последовательность прохождения осей;
расстояние между осями;
скорость отцепа;
Световые решетки;
Устройства определения габарита;
Детекторы колеса;
Весомеры
Радары
9.
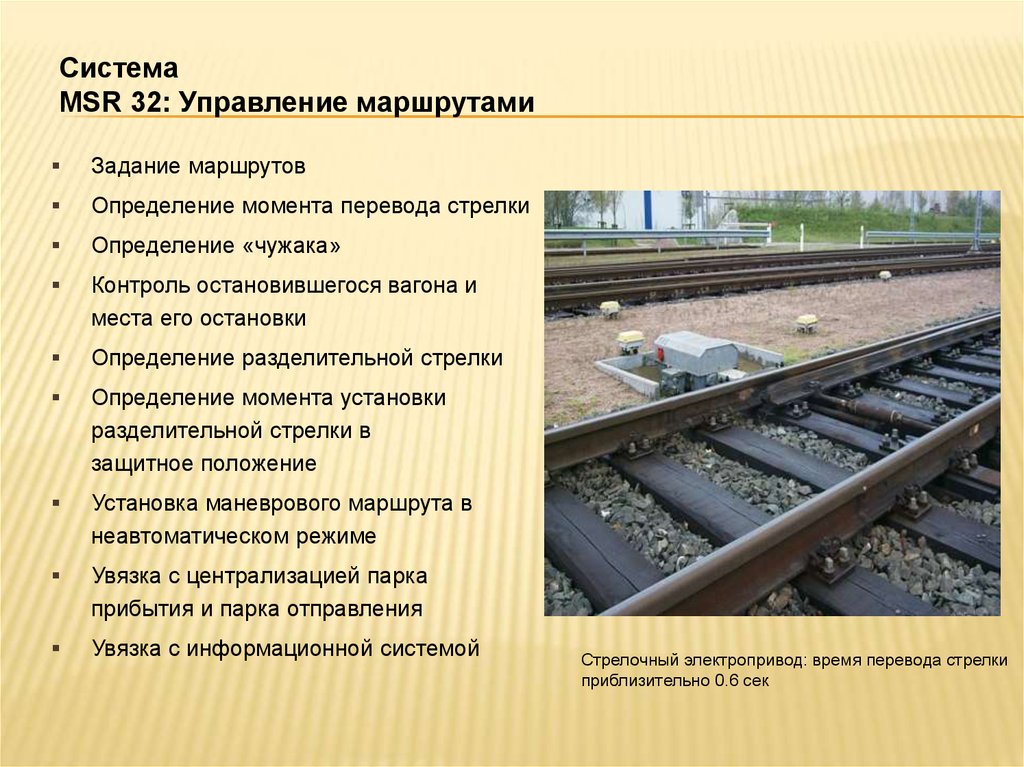
СистемаMSR 32: Управление маршрутами
Задание маршрутов
Определение момента перевода стрелки
Определение «чужака»
Контроль остановившегося вагона и
места его остановки
Определение разделительной стрелки
Определение момента установки
разделительной стрелки в
защитное положение
Установка маневрового маршрута в
неавтоматическом режиме
Увязка с централизацией парка
прибытия и парка отправления
Увязка с информационной системой
Стрелочный электропривод: время перевода стрелки
приблизительно 0.6 сек
10.
СистемаMSR 32: Управление замедлителями
Управление скоростью движения посредством замедлителей на
верхней, средней и нижней тормозной позиции, точный расчет
вариантов надвига в системе управления роспуском
Управление градацией компенсационных замедлителей для
оптимизации скорости отцепов на подгорочных путях с целью
исключения недопустимого ускорения вагонов
11.
СистемаMSR 32: Управление буксировочными устройствами
Оптимальное заполнение подгорочных путей на горках большой
мощности посредством интегрирования устройств буксировки в
систему управления роспуском
Введение буксировочных систем в процедуру роспуска позволяет
достичь точного места остановки готового к сцепке вагона в зависимости
от степени занятости подгорочных путей
12.
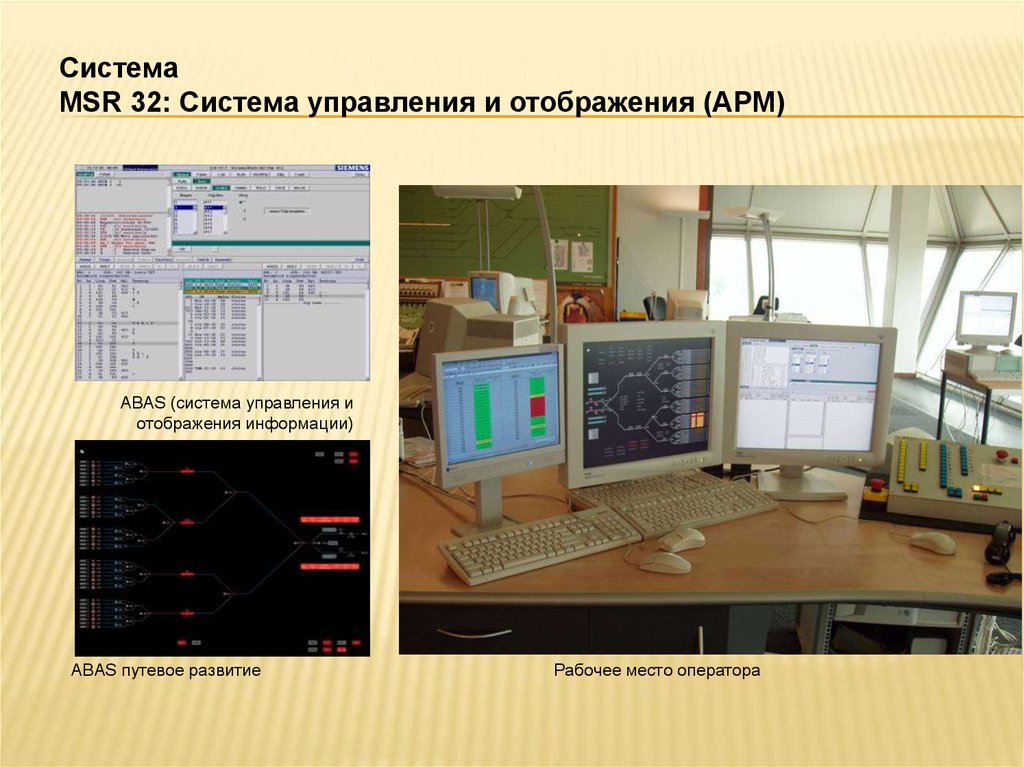
СистемаMSR 32: Система управления и отображения (АРМ)
ABAS (система управления и
отображения информации)
ABAS путевое развитие
Рабочее место оператора
13.
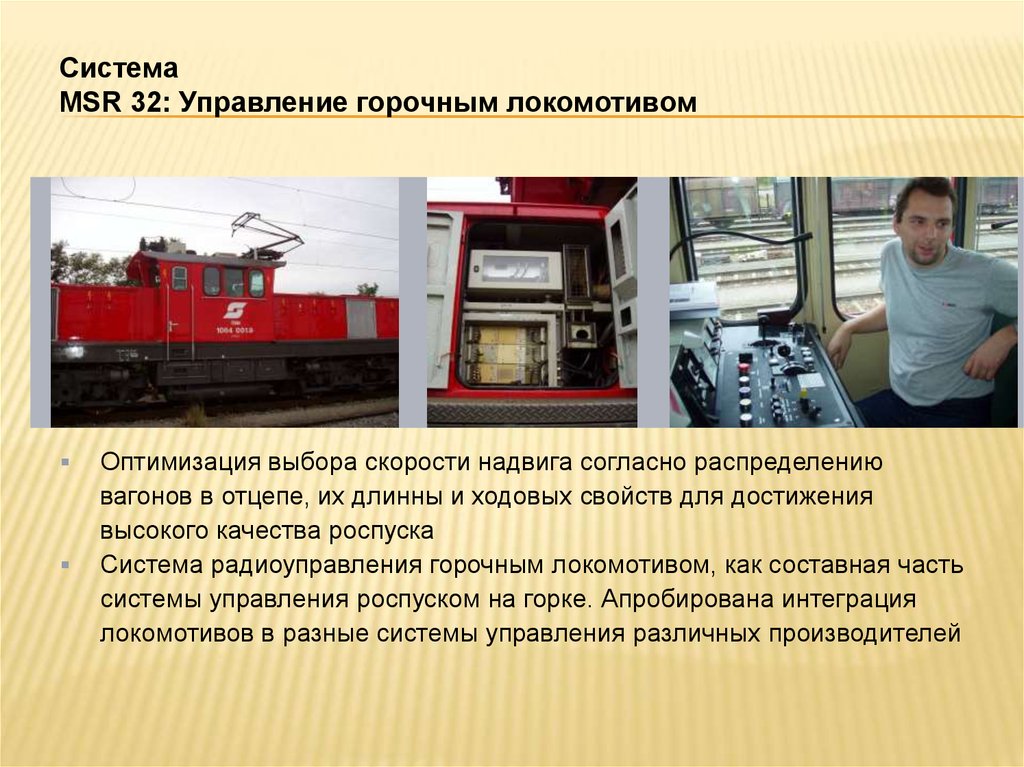
СистемаMSR 32: Управление горочным локомотивом
Оптимизация выбора скорости надвига согласно распределению
вагонов в отцепе, их длинны и ходовых свойств для достижения
высокого качества роспуска
Система радиоуправления горочным локомотивом, как составная часть
системы управления роспуском на горке. Апробирована интеграция
локомотивов в разные системы управления различных производителей
14.
MSR32 ПОЛНАЯ КОНФИГУРАЦИЯ СИСТЕМЫISDN
LSS
HCS
HCS
Printer
Admin-LAN
ROUTER
HCS
MD
MaS
Printer
OPSIM
Printer
DS
OperationalLAN
АСУ СС
K
CC
L
LWS
RCS
PRCS
SRCS
TRCS
PCS
1-2
1-4
1-8
1-8
15. MSR32 Полная конфигурация системы
СистемаMSR 32: Испытанная технология
Открытая модульная микропроцессорная система, которая отвечает
различным предъявляемым требованиям
применение стандартных промышленных аппаратных средств,
полностью контролируемых и управляемых в реальном времени;
Конфигурация программного обеспечения для любой специфики и для
любого технологического процесса
16.
CARGO AUTOMATIONMSR 32 TB K LOWER RETARDER
CONTROLLER
УПРАВЛЕНИЕ ЗАМЕДЛИТЕЛЯМИ НА СРЕДНЕЙ ТОРМОЗНОЙ ПОЗИЦИИ
Управление скоростью отцепов
посредством балочных
замедлителей на средней
тормозной позиции
Легко вводимое экономичное
решение для модернизации
небольших горок
Независимое управление
Конфигурируемые уровни
автоматизации
Полная совместимость и
интеграция в существующие
системы управления на станции
Компактный дизайн
Легкое обслуживание и
диагностика
17. Cargo Automation MSR 32 TB K Lower Retarder Controller Управление замедлителями на средней тормозной позиции
MSR 32КОНФИГУРАЦИЯ
СИСТЕМЫ
ISDN
Router
ADMIN
LAN
Operational
LAN
HCS
HCS
CC
MaS
RCS
Printer
18. MSR 32 конфигурация системы
ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕУдаленная диагностика и
имитационное моделирование
АРМ обслуживающего персонала
19. Техническое обслуживание
MSR32 ФУНКЦИИ ДИАГНОСТИКИХранящаяся в базе данных информация позволяет реализовать широкий спектр функций
диагностики
1.
Статистика работы для
Стрелок
Замедлителей
Подтягивающих устройств
2.
Статистика отказов
3.
Протокол работы системы
4.
Статистика точности работы замедлителей
5.
Протокол событий
6.
Параметры торможения отцепа
7.
Кривые процесса торможения
20. MSR32 Функции диагностики
Cargo Automation – ReferenceMSR 32 Hump Control System
Заказчик:
Hafenbauamt Hamburg (Germany)
Характеристики системы:
3 замедлителя на средней тормозной
позиции, 24 замедлителя на путях
подгорочного парка
Вид управления:
прицельное торможение
Элементы системы MSR 32 :
система автоматизации процесса роспуска и
маршрутизации, управление всеми
замедлителями, автоматизация маневровых
маршрутов, связь с центральной системой
планирования в Гамбурге
Внедрение
апрель1993 - сентябрь 1995
март 2005 - декабрь 2006
Hamburg – Alte Süderelbe
Marshalling Yard
21.
Cargo Automation – ReferenceMSR 32 Hump Control System
Заказчик:
Федеральная железная дорога Швейцарии (SBB)
Данные системы:
основная горка: 2 замедлителя на верхней тормозной
позиции и 8 замедлителей на средней тормозной
позиции, 64 замедлителя на подгорочных путях,
буксировочное оборудование
второстепенная горка: 2 замедлителя на верхней
тормозной позиции, 13 замедлителей на путях
подгорочного парка, буксировочное оборудование
Параметры роспуска:
330 вагона в час на основной горке
Вид управления:
полностью автоматизированное
элементы MSR 32 :
управление маршрутами скатывания, управление и
замедлителями и буксировочными устройствами,
система радиоуправления горочным локомотивом,
Связь с центральной обрабатывающей системой.
Внедрение:
Июль 1998 - апрель 1999
Zürich – Limmattal Marshalling Yard
22.
Cargo Automation – ReferenceMSR 32 Hump Control System
Заказчик:
Финские государственные железные дороги (VR)
Характеристика системы:
3 замедлителя на средней тормозной позиции,
49 подгорочных путей
Перерабатывающая способность:
приблизительно 1.400 вагонов в день
Вид управления и требования по
управлению:
Неавтоматизированное прицельное торможение,
автоматический способ задания маршрутов,
контроль маршрутов приема и отправления
Элементы системы MSR 32 :
управление маршрутами и контроль следования
отцепов, система управления замедлителями
II тп., компьютерные маневровые маршруты и
увязка с МПЦ станции.
Внедрение: декабрь 1999 - август 2001
Kouvola Marshalling Yard
23.
Cargo Automation – ReferenceMSR 32 Hump Control System
Заказчик:
Немецкие железные дороги (DB AG)
Параметры системы:
4 замедлителя на средней тормозной позиции,
34 замедлителя на путях подгорочного парка,
буксировочное оборудование
Вид управления:
точное прицельное торможение и буксировка
Элементы системы MSR 32 :
система маршрутизации процесса роспуска,
управление всеми замедлителями на всех
тормозных позициях и буксировочными тележками,
система радиоуправления горочным локомотивом,
связь с центральной обрабатывающей системой
Внедрение: октябрь 2003 май 2006
Seelze Marshalling Yard (eastbound)
24.
Cargo Automation – ReferenceMSR 32 Hump Control System
Заказчик:
Австрийские федеральные дороги (ÖBB)
Параметры системы:
2 пути надвига, 48 подгорочных путей,
точечные замедлители
Интенсивность роспуска:
320 вагонов в час
Вид управления:
Квазинепрерывное торможение в
процессе роспуска с автоматизацией
процесса задания маршрутов
Элементы системы MSR 32:
управление процессом роспуска, система
радиоуправления горочным локомотивом,
связь с центральной обрабатывающей
системой
Внедрение: Декабрь 2002 июнь 2004
Vienna Central Marshalling Yard
(main hump)
25.
Cargo Automation – ReferenceMSR 32 Hump Control System
Заказчик:
Литовская железная дорога (LG)
Параметры системы:
1 путь надвига, 20 подгорочных путей,
1 балочный замедл. на 1 ТП, 3 замедл. на средней
ТП, 20 замедлителя на подгорочных путях
Интенсивность роспуска:
3000 вагонов в день
Вид управления, система MSR 32 :
система автоматизации процесса роспуска и
маршрутизации, управление всеми
замедлителями, прицельное торможение, связь с
центральной системой планирования
Внедрение: 2008
Сортировочная горка ст.Вайдотай,
Литовские железные дороги