







 electronics
electronicsSimilar presentations:





")




Механические характеристики асинхронного двигателя в двигательном и тормозных режимах
1.
СЕВАСТОПОЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТКафедра «ВОЗОБНОВЛЯЕМЫЕ ИСТОЧНИКИ ЭНЕРГИИ И
ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ И СЕТИ»
Дисциплина:
«Автоматизированный электрический привод»
Лекция № 6:
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
АСИНХРОННОГО ДВИГАТЕЛЯ В
ДВИГАТЕЛЬНОМ И ТОРМОЗНЫХ РЕЖИМАХ
Доцент кафедры к. т. н.
ГОРПИНЧЕНКО Александр Владимирович
2.
1ВОПРОСЫ
1. Влияние
параметров
сети
механическую характеристику АД.
и
двигателя
на
2. Механические характеристики АД в тормозных
режимах.
ЛИТЕРАТУРА
М.Г.Чиликин, А.С.Сандлер
«Общий курс электропривода», стр. 82…89.
3.
1. Влияние параметров сети и двигателя на механическуюхарактеристику АД
2
Знание механических характеристик АД необходимо для оценки
работы двигателя:
1) при ухудшении качества электроэнергии в питающей
сети (U1, f1);
2) при формировании пускового режима АД;
3) при регулировании скорости вращения АД.
(1)
Mк
3U1
2
2Ω 0 [(R 1 R x1 x
2
1
]
' 2
2
(2)
4.
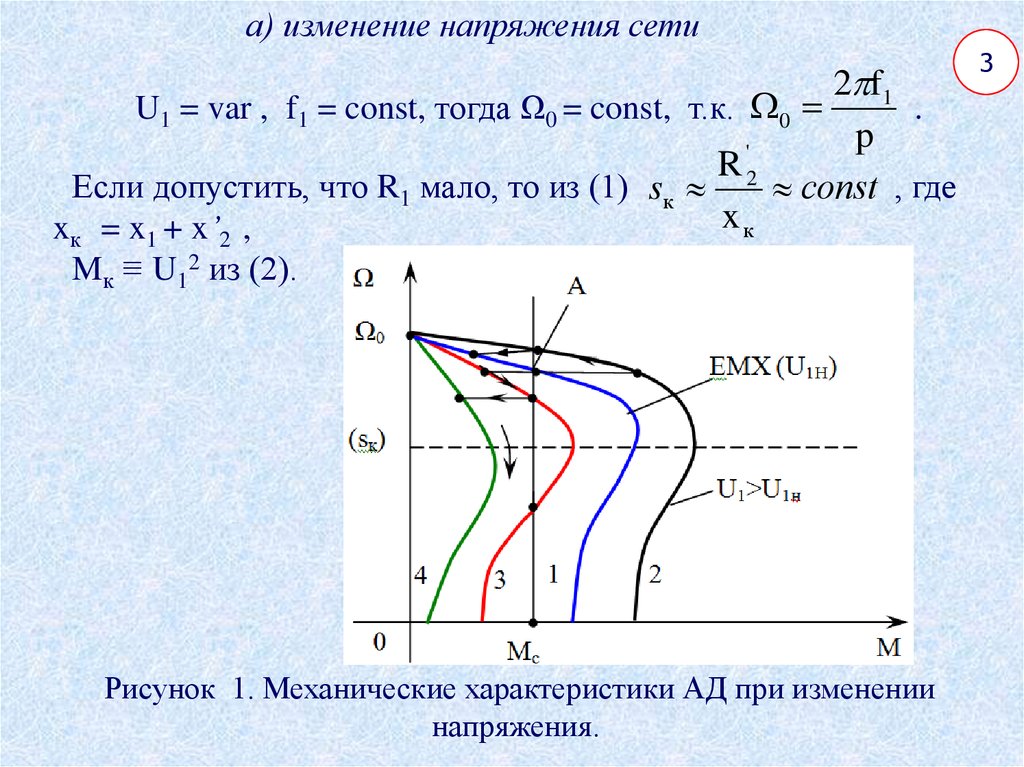
а) изменение напряжения сети2 f1
U1 = var , f1 = const, тогда Ω0 = const, т.к. 0
.
p
'
R
Если допустить, что R1 мало, то из (1) sк 2 сonst , где
xк
x = x + x’ ,
к
1
2
Mк ≡ U12 из (2).
Рисунок 1. Механические характеристики АД при изменении
напряжения.
3
5.
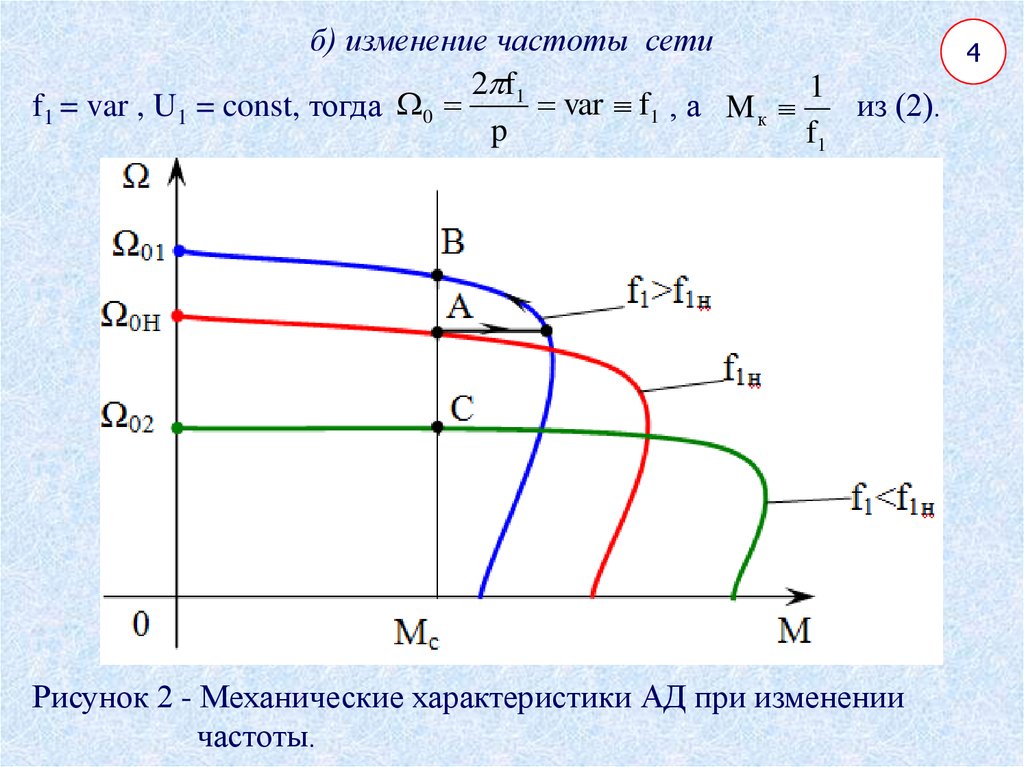
б) изменение частоты сети2 f1
1
var f1 , а M к
f1 = var , U1 = const, тогда 0
из (2).
p
f1
Рисунок 2 - Механические характеристики АД при изменении
частоты.
4
6.
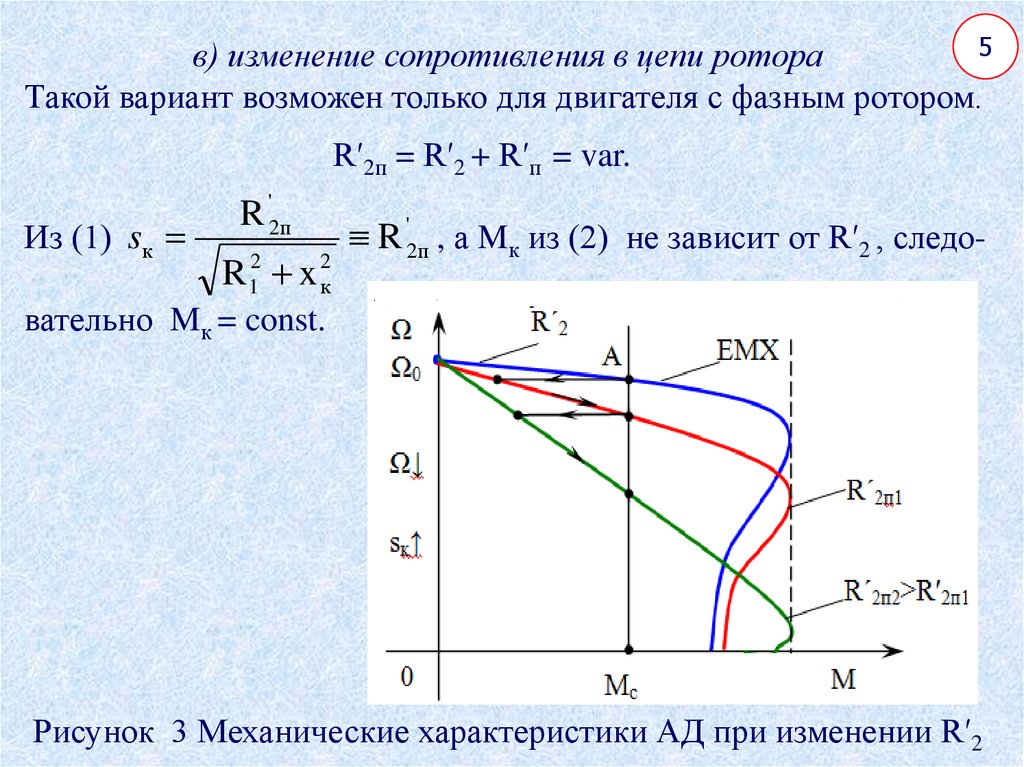
5в) изменение сопротивления в цепи ротора
Такой вариант возможен только для двигателя с фазным ротором.
R′2п = R′2 + R′п = var.
Из (1) sк
R '2п
R 12 x к2
R '2п , а Mк из (2) не зависит от R′2 , следо-
вательно Mк = const.
Рисунок 3 Механические характеристики АД при изменении R′2
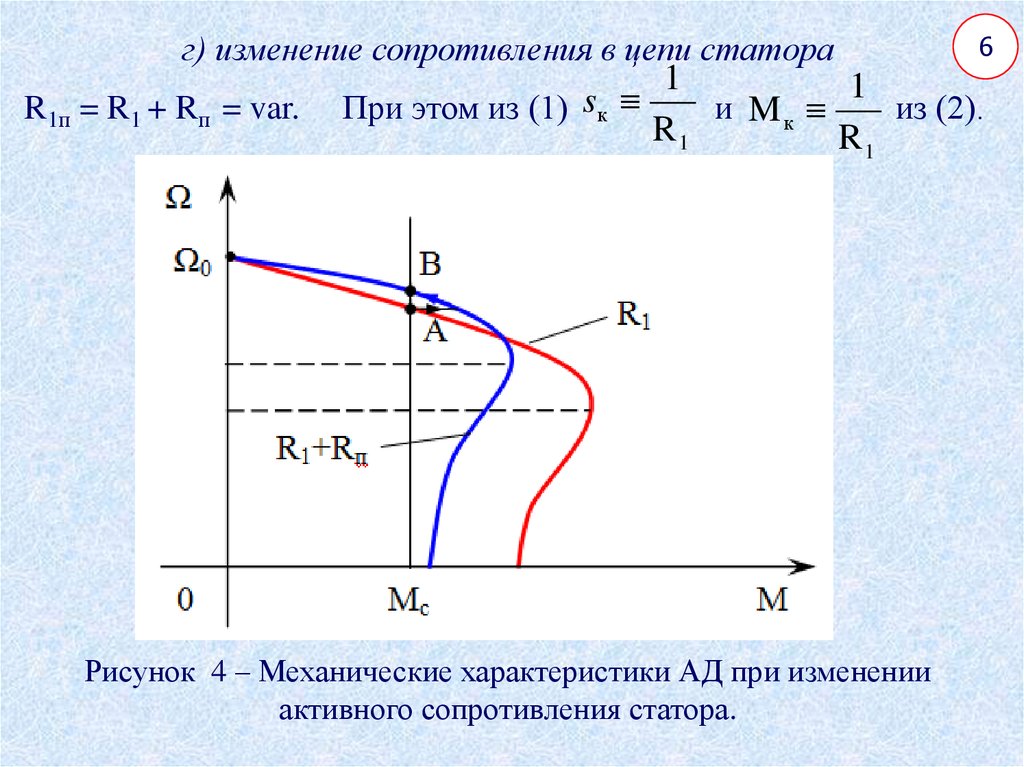
7.
г) изменение сопротивления в цепи статораR1п = R1 + Rп = var.
6
1
1
s
При этом из (1) к
и Mк
из (2).
R1
R1
Рисунок 4 – Механические характеристики АД при изменении
активного сопротивления статора.
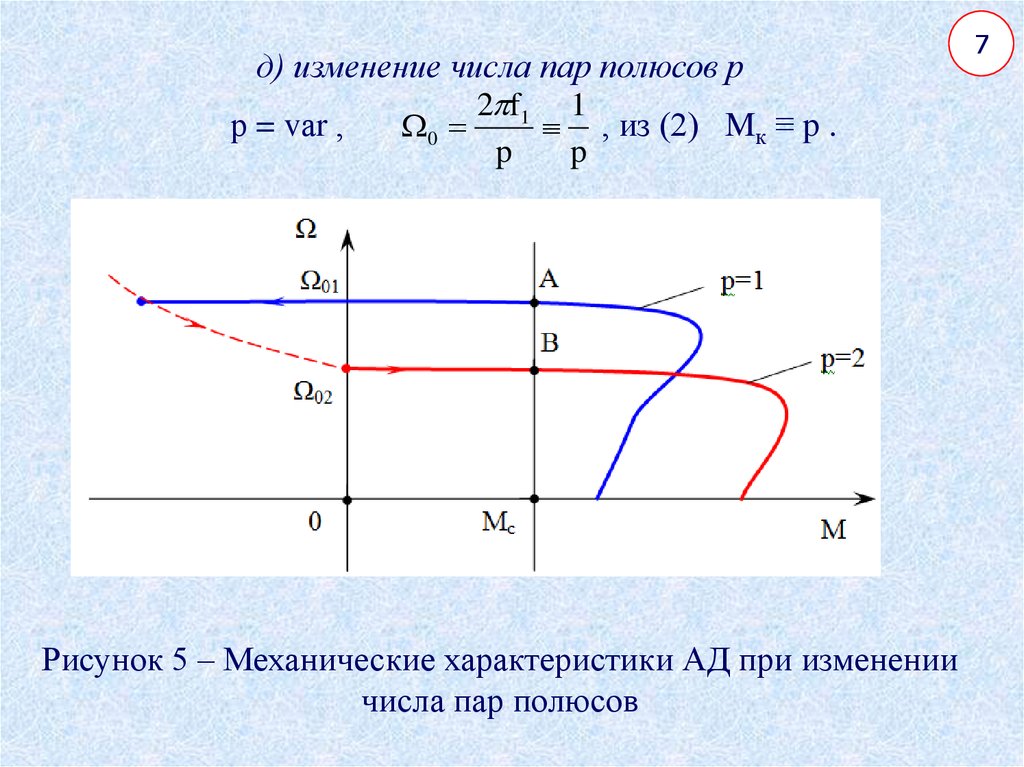
8.
д) изменение числа пар полюсов р2 f1 1
р = vаr ,
0
, из (2) Mк ≡ p .
p
p
Рисунок 5 – Механические характеристики АД при изменении
числа пар полюсов
7
9.
2. Механические характеристики АД в тормозных режимах8
Для торможения АД могут применяться те же способы, что и
для ЭД постоянного тока:
1) генераторное торможение с отдачей энергии в сеть;
2) торможение противовключением;
3) динамическое торможение.
а) генераторное торможение с отдачей энергии в сеть
Генераторное торможение возможно при скорости вращения
ротора выше синхронной, т.е. при Ω > Ω0.
Проводники обмотки статора пересекаются вращающимся
магнитным полем в прежнем направлении, а проводники ротора
– в обратном, в связи с чем направление ЭДС меняет знак
(s
0
0 ).
0
10.
9Используем выражение для тока ротора, записанного в
комплексной форме из Т- образной схемы замещения АД
I
'
2
E '2
'
2
R
jx '2
s
(3)
'
'
'
' ' 2
E
s
E
R
s
E
xs
I'2 ' 2 ' 2 2 2
j 22 2
(4)
'
'
2
R 2 jx 2s R '2 (x '2s) 2
R 2 (x 2s)
Изменение направления активной составляющей тока
соответствует углу сдвига между U1 и I1 на угол φ1 > π / 2 , при
таком угле φ1 причиной тока является уже не напряжение сети,
а ЭДС E1, т.е. двигатель работает генератором, создавая
тормозной момент (рисунок 6).
11.
10Рисунок 6 – Векторная диаграмма АД при рекуперативном
торможении
12.
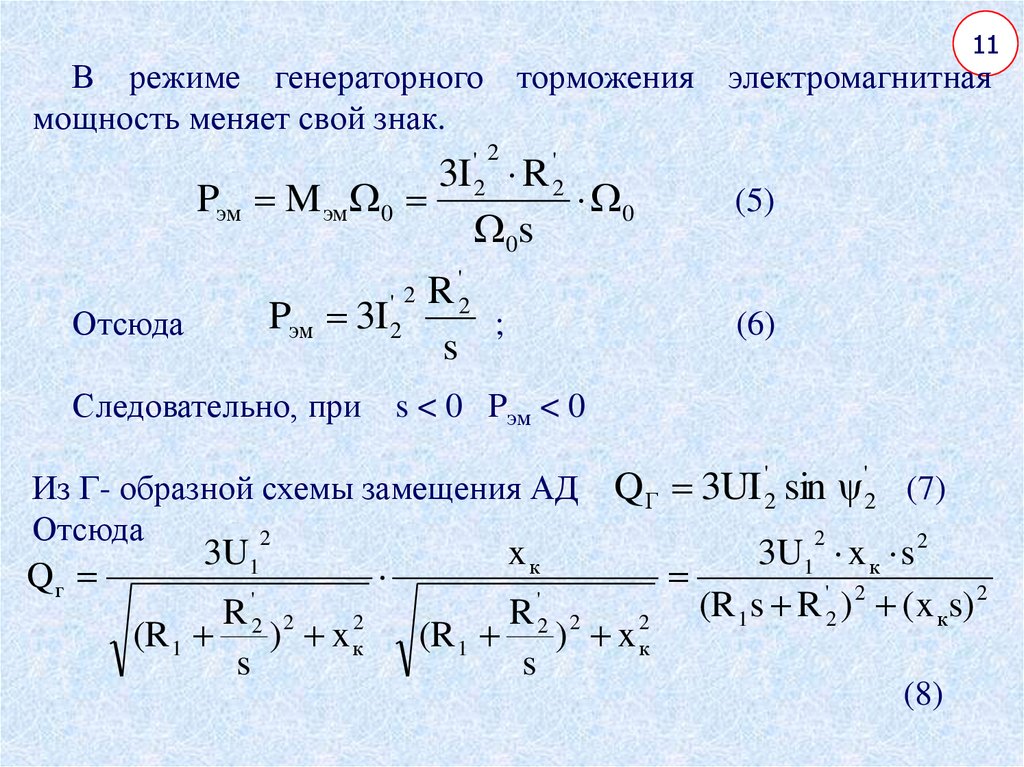
11В режиме генераторного торможения электромагнитная
мощность меняет свой знак.
' 2
2
3I R '2
Pэм M эм 0
0
0s
R '2
Pэм 3I
;
s
' 2
2
Отсюда
(5)
(6)
Следовательно, при s < 0 Pэм < 0
Из Г- образной схемы замещения АД
Отсюда
2
Qг
3U1
'
2 2
R
(R 1
) x к2
s
Q Г 3UI '2 sin ψ'2 (7)
xк
R '2 2
(R 1
) x к2
s
3U1 x к s 2
(R 1 s R '2 ) 2 ( x к s) 2
2
(8)
13.
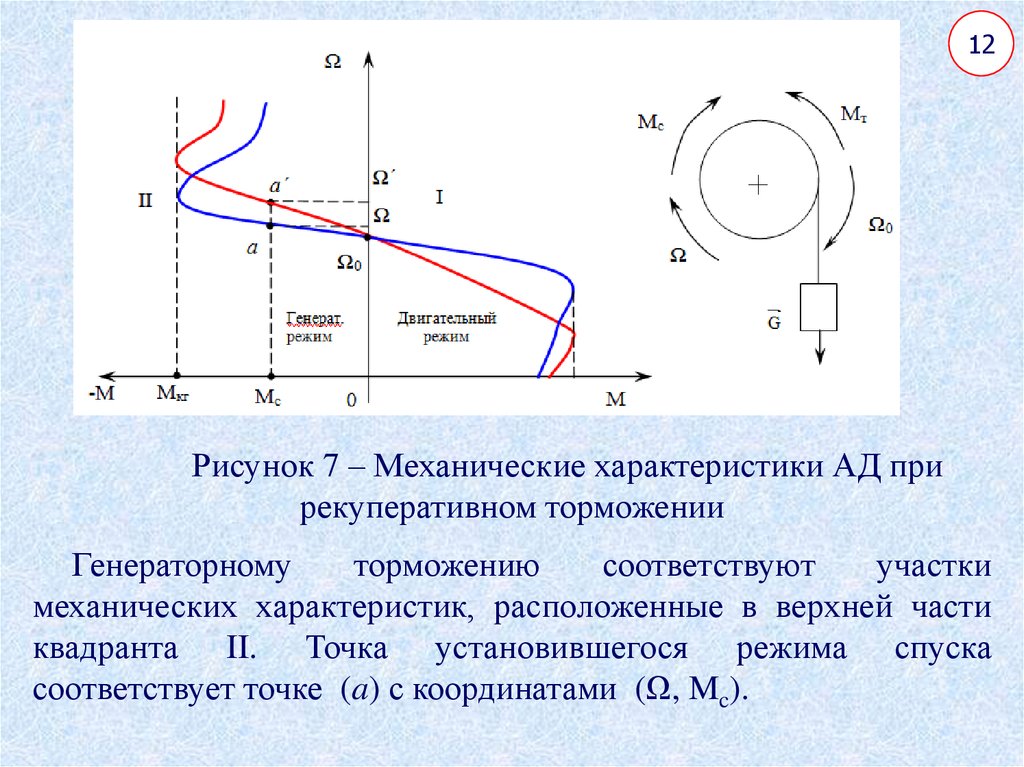
12Рисунок 7 – Механические характеристики АД при
рекуперативном торможении
Генераторному
торможению
соответствуют
участки
механических характеристик, расположенные в верхней части
квадранта II. Точка установившегося режима спуска
соответствует точке (a) с координатами (Ω, Mc).
14.
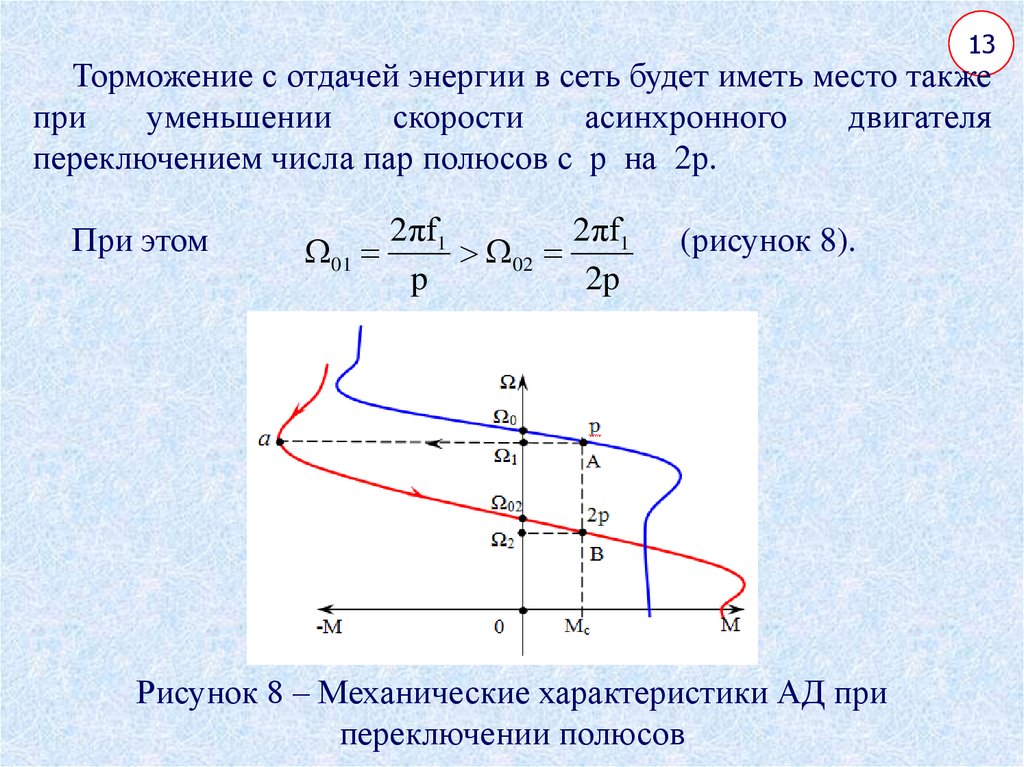
13Торможение с отдачей энергии в сеть будет иметь место также
при
уменьшении
скорости
асинхронного
двигателя
переключением числа пар полюсов с р на 2р.
При этом
2πf1
2πf1
Ω 01
Ω 02
p
2p
(рисунок 8).
Рисунок 8 – Механические характеристики АД при
переключении полюсов
15.
14б) торможение противовключением
Режим противовключения, это такой режим, при котором
исполнительный механизм вращает двигатель в сторону,
обратную действию момента, развиваемого двигателем. У АД
ротор при этом будет вращаться в направлении, обратном
направлению вращающегося поля.
s
0
0
16.
15Торможение
противовключением
можно
получить,
изменением очередности чередования фаз статора у
вращающегося двигателя. При этом изменяется направление
момента двигателя, т.к. меняется направление вращения поля
(рис. 10). При этом скольжение s > 1, а ток достигает значений
I1 ≥ (6 ÷ 8) I1Н.
Для ограничения величины тока и увеличения тормозного
момента в АД с фазным ротором при противовключении в цепь
ротора включают добавочные активные сопротивления (рис.9).
17.
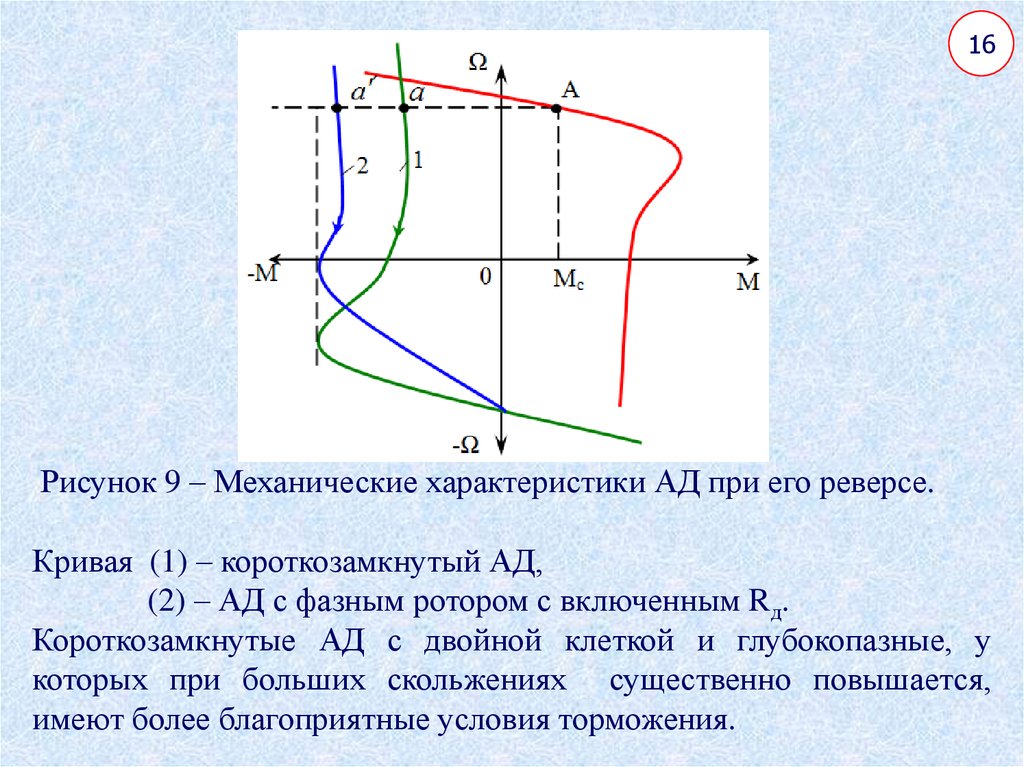
16Рисунок 9 – Механические характеристики АД при его реверсе.
Кривая (1) – короткозамкнутый АД,
(2) – АД с фазным ротором с включенным Rд.
Короткозамкнутые АД с двойной клеткой и глубокопазные, у
которых при больших скольжениях существенно повышается,
имеют более благоприятные условия торможения.
18.
17Если в цепь фазного ротора двигателя при подъеме груза
включить большое сопротивление, то при Mc > M получим также
режим противовключения.
Рисунок10 – Механические
характеристики АД с
фазным ротором при
торможении
противовключением.
19.
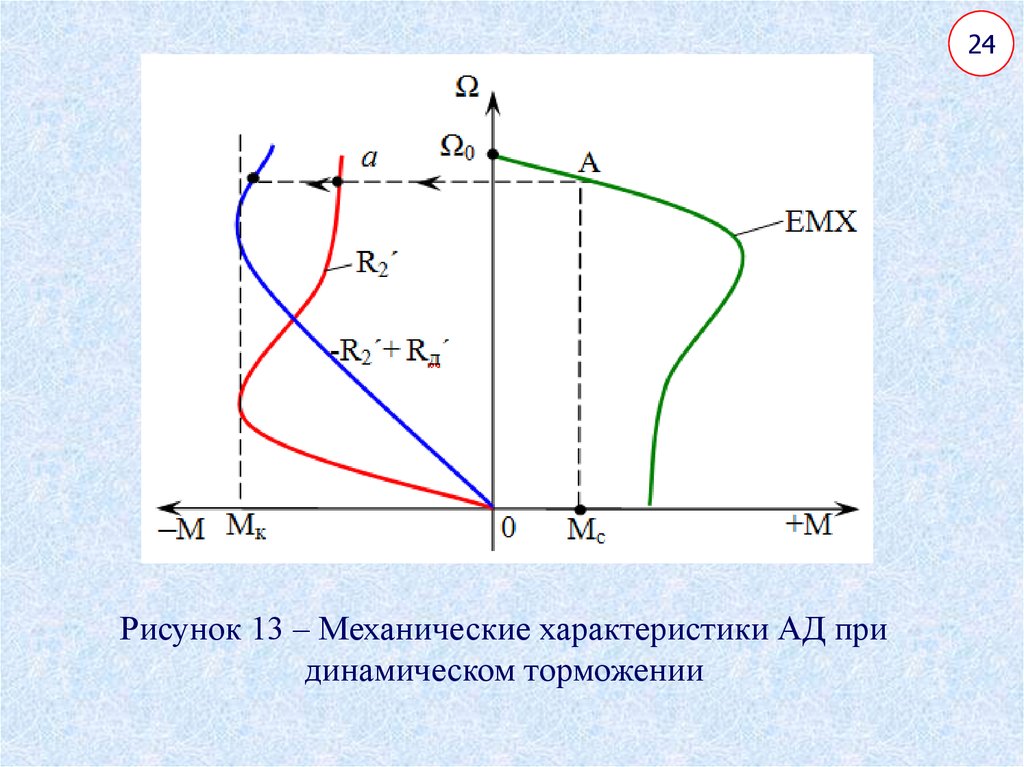
18в) динамическое торможение
При динамическом торможении АД работает генератором,
нагрузкой которого является сопротивление цепи обмотки ротора.
При этом может быть применено независимое возбуждение или
самовозбуждение.
Поскольку, при тормозном режиме работы отсутствует
вращающееся магнитное поле Ω0 = 0 и – Ω / Ω0 = ν ,
где: ν – относительная скорость вращения ротора.
Величина момента определяется по аналогичной для АД
' 2
формуле
3I 2 R '2 /
M эм
(9)
0
Анализ работы АД в режиме динамического торможения
целесообразно провести считая, что обмотка статора питается не
постоянным, а эквивалентным трёхфазным током Iэкв. Такая замена
предполагает равенство намагничивающих сил. Fэкв = Fпост
20.
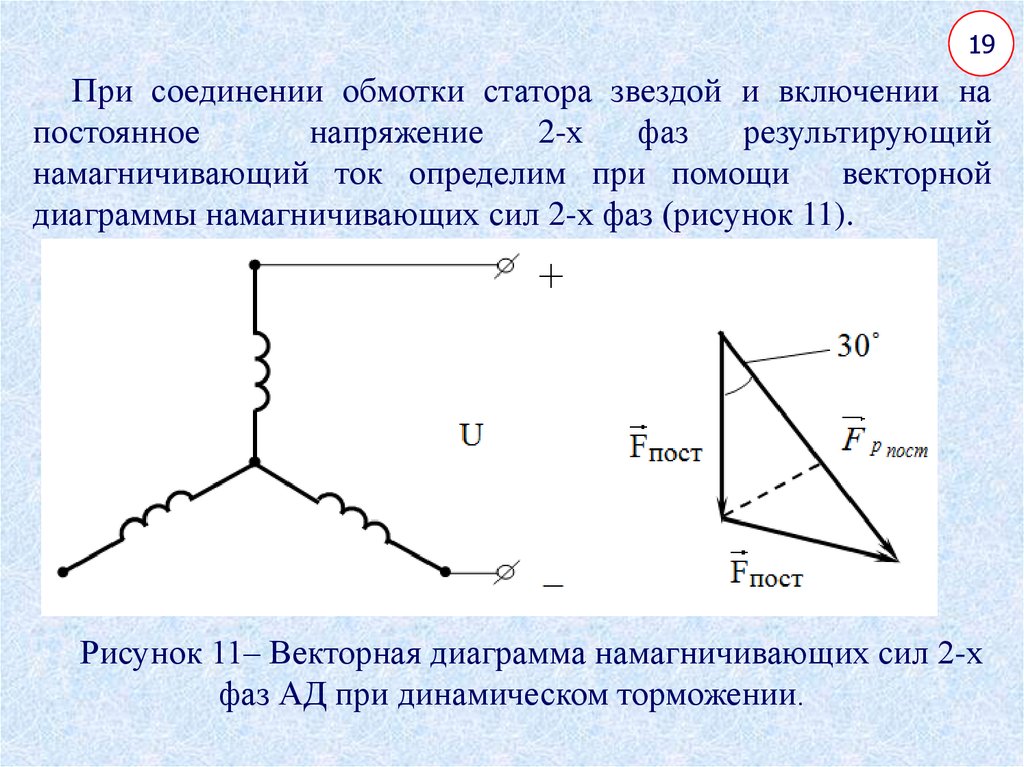
19При соединении обмотки статора звездой и включении на
постоянное
напряжение
2-х
фаз
результирующий
намагничивающий ток определим при помощи
векторной
диаграммы намагничивающих сил 2-х фаз (рисунок 11).
Рисунок 11– Векторная диаграмма намагничивающих сил 2-х
фаз АД при динамическом торможении.
21.
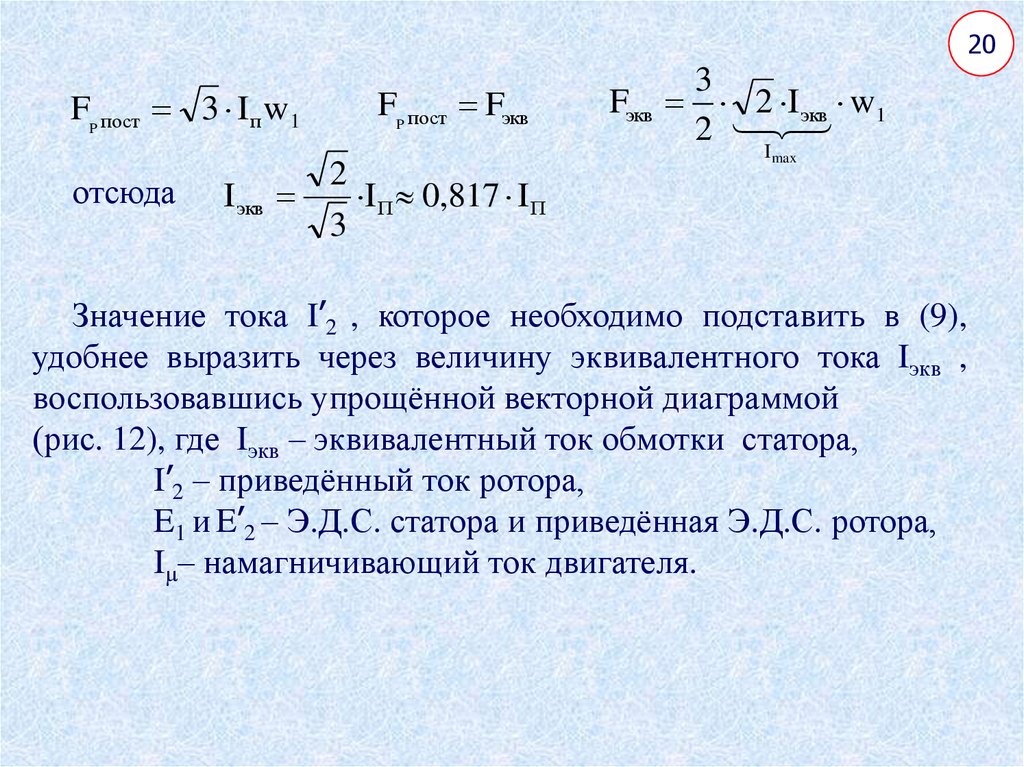
20FP пост 3 I п w1
отсюда
I экв
FP пост Fэкв
2
I П 0,817 I П
3
Fэкв
3
2 I экв w1
2
I max
Значение тока I’2 , которое необходимо подставить в (9),
удобнее выразить через величину эквивалентного тока Iэкв ,
воспользовавшись упрощённой векторной диаграммой
(рис. 12), где Iэкв – эквивалентный ток обмотки статора,
I’2 – приведённый ток ротора,
E1 и E’2 – Э.Д.С. статора и приведённая Э.Д.С. ротора,
Iμ– намагничивающий ток двигателя.
22.
21Рисунок 12 – Упрощенная векторная диаграмма АД при
динамическом торможении
Из Δ OAB Iμ = Iэкв + I’2, а также по теореме косинусов
I2экв = I’22 + Iμ2 - 2 I’2 Iμ cos (90o + ψ2) = I’22 + Iμ2 + 2 I’2 Iμ sin ψ2
(10)
23.
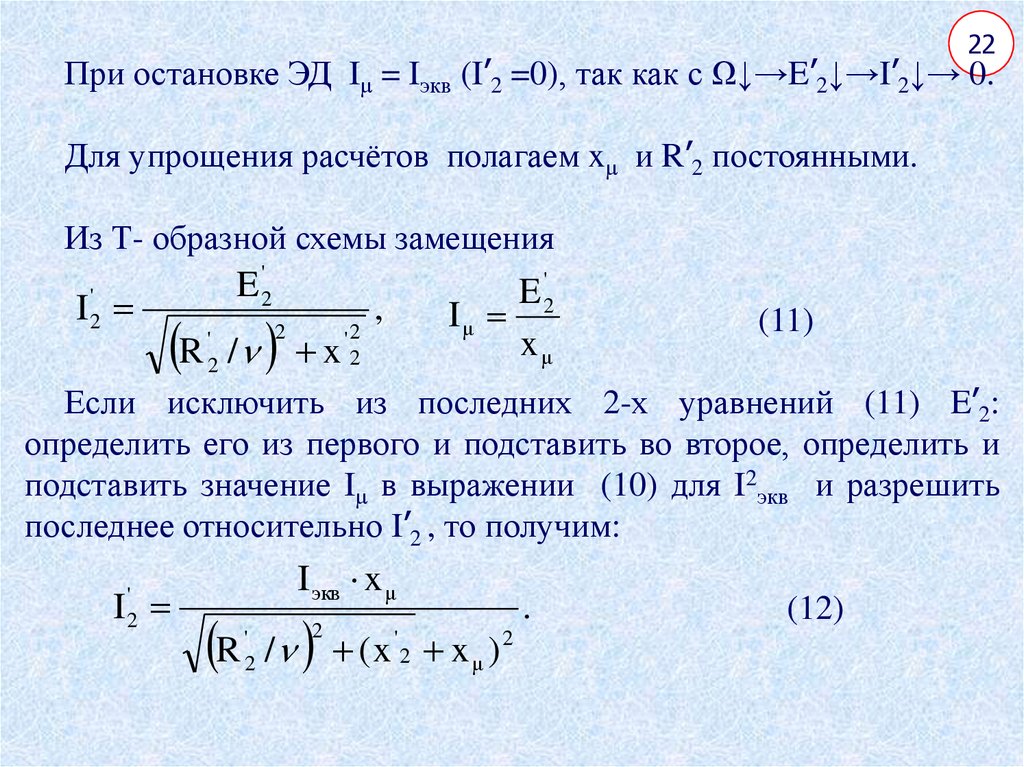
22При остановке ЭД Iμ = Iэкв (I’2 =0), так как с Ω↓→E’2↓→I’2↓→ 0.
Для упрощения расчётов полагаем xμ и R’2 постоянными.
Из Т- образной схемы замещения
I
'
2
R
E '2
'
2
/
2
x
'2
2
,
E '2
Iμ
xμ
(11)
Если исключить из последних 2-х уравнений (11) E’2:
определить его из первого и подставить во второе, определить и
подставить значение Iμ в выражении (10) для I2экв и разрешить
последнее относительно I’2 , то получим:
I
'
2
R
I экв x μ
'
2
/
2
(x '2 x μ )2
.
(12)
24.
23Для величины тормозного момента (9)
M эм
3I 2экв x 2μ R '2 / ν
2
0[ R / ν (x '2 x μ )2 ]
'
2
.
(13)
Отсюда видно, что тормозной момент, если считать xμ = const и
R’2= const определяется величиной тока Iэкв и относительной
скоростью ν.
Значение νк , при котором момент Mэм имеет максимум:
νк
R '2
;
x 2 xμ
Mк
'
3I 2экв x 2μ
2 0 ( x 2 x μ )
'
(14)
.
(15)
25.
24Рисунок 13 – Механические характеристики АД при
динамическом торможении