 electronics
electronicsSimilar presentations:








")

Исследование режимов работы двигателя постоянного тока с последовательным возбуждением. Лабораторная работа № 4
1.
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«УФИМСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЯНОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра прикладной химии и физики
Лабораторная работа № 4
ИССЛЕДОВАНИЕ РЕЖИМОВ РАБОТЫ ДВИГАТЕЛЯ
ПОСТОЯННОГО ТОКА С ПОСЛЕДОВАТЕЛЬНЫМ
ВОЗБУЖДЕНИЕМ
Уфа
2008
2.
Методическиеуказания
содержат
краткое
изложение
теории
электродвигателей постоянного тока с последовательным и независимым
возбуждением, описание лабораторного стенда, рабочие задания и контрольные
вопросы. Работа предназначена для студентов дневного, вечернего и заочного
отделений архитектурно – строительного и геофизического факультетов.
СОСТАВИТЕЛИ:
ГАРЕЕВ Г. Г., ст. преподаватель
РЯБИШИНА Л. А., преподаватель, к.т.н.
РЕЦЕНЗЕНТ
ЖДАНОВ А. Г., доцент, к.т.н.
© Уфимский государственный нефтяной технический университет, 2008
2
3.
ЛАБОРАТОРНАЯ РАБОТАИССЛЕДОВАНИЕ РЕЖИМОВ РАБОТЫ ДВИГАТЕЛЯ
ПОСТОЯННОГО ТОКА С ПОСЛЕДОВАТЕЛЬНЫМ
ВОЗБУЖДЕНИЕМ
1. ЦЕЛЬ РАБОТЫ
Ознакомиться с назначением, устройством и принципом действия
электродвигателей постоянного тока.
Изучить основные характеристики и режимы работы двигателя постоянного
тока с последовательным возбуждением (ДПТ с ПВ)
2. ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ.
2.1. Назначение, устройство и принцип действия ДТП
Электродвигатели
постоянного
тока
электрическая
машина
предназначенная для преобразования электрической энергии постоянного тока
в механическую.
Электродвигатели постоянного тока в конструктивном отношении не
отличаются от генераторов постоянного тока. Машины постоянного тока
обратимы и могут работать как в генераторном, так и в двигательном режиме.
Двигатели постоянного тока (ДПТ) обладают важными преимуществами
перед другими электродвигателями: они позволяют плавно и глубоко
регулировать скорость вращения ротора (якоря) и создают большой пусковой
момент, что определяет их широкое использование в качестве тяговых
двигателей на электрифицированном транспорте, в лифтах, приводах тельферов
и других подъемно-транспортных механизмах.
Особенностью ДПТ с ПВ являются необходимость обеспечения
определенного момента сопротивления на валу, т.е. недопустимость работы в
режиме холостого хода т.к. при этом двигатель идет в разнос.
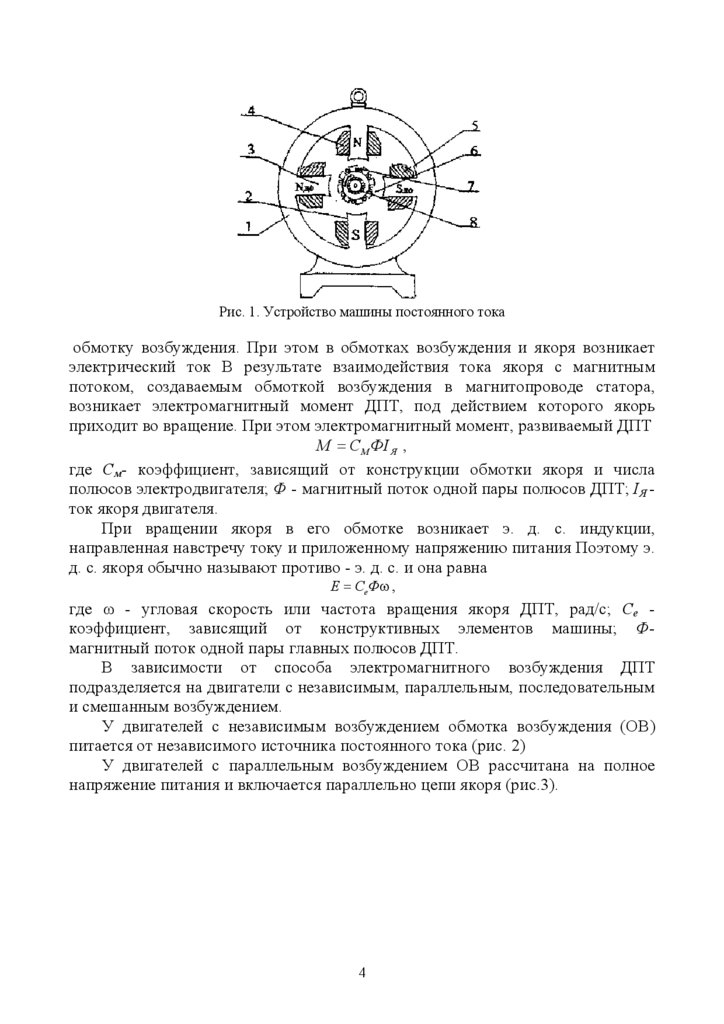
Машина постоянного тока (рис. 1) имеет неподвижную часть- статор 1 и
расположенные на нем главные 2 и дополнительные 3 полюса с обмотками
возбуждения 4 и 5.
Подвижной частью машины является цилиндрический ротор (якорь) 6,
набранный из изолированных друг от друга листов электрической стали для
уменьшения потерь мощности в магнитопроводе якоря. В пазах якоря
размещается обмотка якоря 7, выводы которой соединяются с пластинками
коллектора 8, монтируемого на валу машины.
Как отмечалось выше, МПТ могут работать в режиме генератора или
двигателя. Для работы МПТ в режиме двигателя необходимо от внешнего
источника постоянного тока подать напряжение на щетки машины и в
3
4.
Рис. 1. Устройство машины постоянного токаобмотку возбуждения. При этом в обмотках возбуждения и якоря возникает
электрический ток В результате взаимодействия тока якоря с магнитным
потоком, создаваемым обмоткой возбуждения в магнитопроводе статора,
возникает электромагнитный момент ДПТ, под действием которого якорь
приходит во вращение. При этом электромагнитный момент, развиваемый ДПТ
M = C M ФI Я ,
где См- коэффициент, зависящий от конструкции обмотки якоря и числа
полюсов электродвигателя; Ф - магнитный поток одной пары полюсов ДПТ; IЯ ток якоря двигателя.
При вращении якоря в его обмотке возникает э. д. с. индукции,
направленная навстречу току и приложенному напряжению питания Поэтому э.
д. с. якоря обычно называют противо - э. д. с. и она равна
E = CeФω ,
где ω - угловая скорость или частота вращения якоря ДПТ, рад/с; Се коэффициент, зависящий от конструктивных элементов машины; Фмагнитный поток одной пары главных полюсов ДПТ.
В зависимости от способа электромагнитного возбуждения ДПТ
подразделяется на двигатели с независимым, параллельным, последовательным
и смешанным возбуждением.
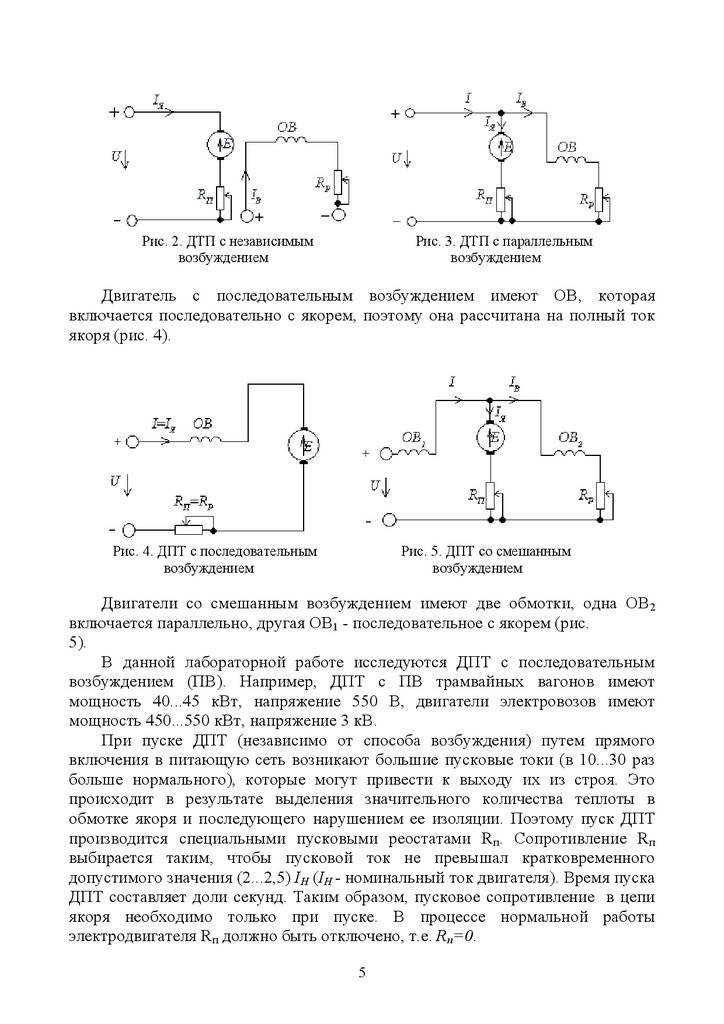
У двигателей с независимым возбуждением обмотка возбуждения (ОВ)
питается от независимого источника постоянного тока (рис. 2)
У двигателей с параллельным возбуждением ОВ рассчитана на полное
напряжение питания и включается параллельно цепи якоря (рис.3).
4
5.
Рис. 2. ДТП с независимымвозбуждением
Рис. 3. ДТП с параллельным
возбуждением
Двигатель с последовательным возбуждением имеют ОВ, которая
включается последовательно с якорем, поэтому она рассчитана на полный ток
якоря (рис. 4).
Рис. 4. ДПТ с последовательным
возбуждением
Рис. 5. ДПТ со смешанным
возбуждением
Двигатели со смешанным возбуждением имеют две обмотки, одна ОВ2
включается параллельно, другая ОВ1 - последовательное с якорем (рис.
5).
В данной лабораторной работе исследуются ДПТ с последовательным
возбуждением (ПВ). Например, ДПТ с ПВ трамвайных вагонов имеют
мощность 40...45 кВт, напряжение 550 В, двигатели электровозов имеют
мощность 450...550 кВт, напряжение 3 кВ.
При пуске ДПТ (независимо от способа возбуждения) путем прямого
включения в питающую сеть возникают большие пусковые токи (в 10...30 раз
больше нормального), которые могут привести к выходу их из строя. Это
происходит в результате выделения значительного количества теплоты в
обмотке якоря и последующего нарушением ее изоляции. Поэтому пуск ДПТ
производится специальными пусковыми реостатами Rп. Сопротивление Rп
выбирается таким, чтобы пусковой ток не превышал кратковременного
допустимого значения (2...2,5) IН (IН - номинальный ток двигателя). Время пуска
ДПТ составляет доли секунд. Таким образом, пусковое сопротивление в цепи
якоря необходимо только при пуске. В процессе нормальной работы
электродвигателя Rп должно быть отключено, т.е. Rп=0.
5
6.
Поэтому для ДПТ с ПВ в соответствии со вторым законом Кирхгофа (см.рис. 4) уравнение электрического сопротивления имеет вид
U = E + I Я ( RЯ + RB ) ,
где RЯ и RB сопротивление якоря и ОВ.
С учетом того, что E = cеФω , уравнение частотной характеристики ДПТ с
ПВ приводится к следующему виду:
ω=
U − ( RЯ + RB ) I Я
U
( R + RB )
=
− Я
IЯ
С EФ
C EФ
C EФ
Из формулы следует, что при отсутствии нагрузки на валу и токе якоря
IЯ=0 частота вращения ДПТ при данном значении питающего напряжения
ω=
U
= ω0 ,
CeФ
где ω0 является частотой вращения идеального холостого хода
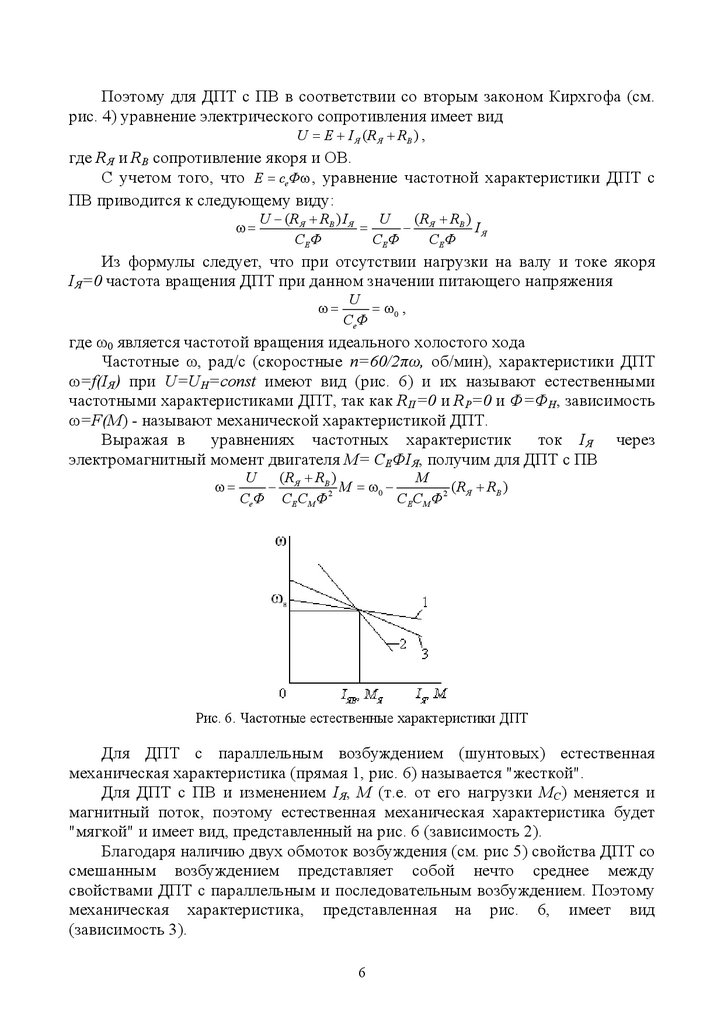
Частотные ω, рад/с (скоростные n=60/2πω, об/мин), характеристики ДПТ
ω=f(IЯ) при U=UH=const имеют вид (рис. 6) и их называют естественными
частотными характеристиками ДПТ, так как RП=0 и RP=0 и Ф=ФН, зависимость
ω=F(M) - называют механической характеристикой ДПТ.
Выражая в
уравнениях частотных характеристик
ток IЯ через
электромагнитный момент двигателя М= СЕФIЯ, получим для ДПТ с ПВ
ω=
U
( R + RB )
M
( RЯ + RB )
− Я
M = ω0 −
2
CeФ СE CM Ф
С E CM Ф 2
Рис. 6. Частотные естественные характеристики ДПТ
Для ДПТ с параллельным возбуждением (шунтовых) естественная
механическая характеристика (прямая 1, рис. 6) называется "жесткой".
Для ДПТ с ПВ и изменением IЯ, М (т.е. от его нагрузки МС) меняется и
магнитный поток, поэтому естественная механическая характеристика будет
"мягкой" и имеет вид, представленный на рис. 6 (зависимость 2).
Благодаря наличию двух обмоток возбуждения (см. рис 5) свойства ДПТ со
смешанным возбуждением представляет собой нечто среднее между
свойствами ДПТ с параллельным и последовательным возбуждением. Поэтому
механическая характеристика, представленная на рис. 6, имеет вид
(зависимость 3).
6
7.
2.2. Способы регулирования скорости вращения ДПТ с ПВПри использовании электропривода часто технологический процесс
требует изменение частоты угловой скорости вращения электродвигателя при
неизменной нагрузке на валу ротора (MС=const). Такое регулирование угловой
скорости вращения ω, как видно из выражения механической характеристики
ω=F(M), можно осуществить изменением U, RP, Ф. Надо помнить, что эти
характеристики
будут
называться
искусственными
механическими
характеристиками
(в
отличии
от
естественных характеристик,
рассмотренных выше) и, кроме того, изменение вследствие колебания нагрузки
не входит понятие регулирования ω.
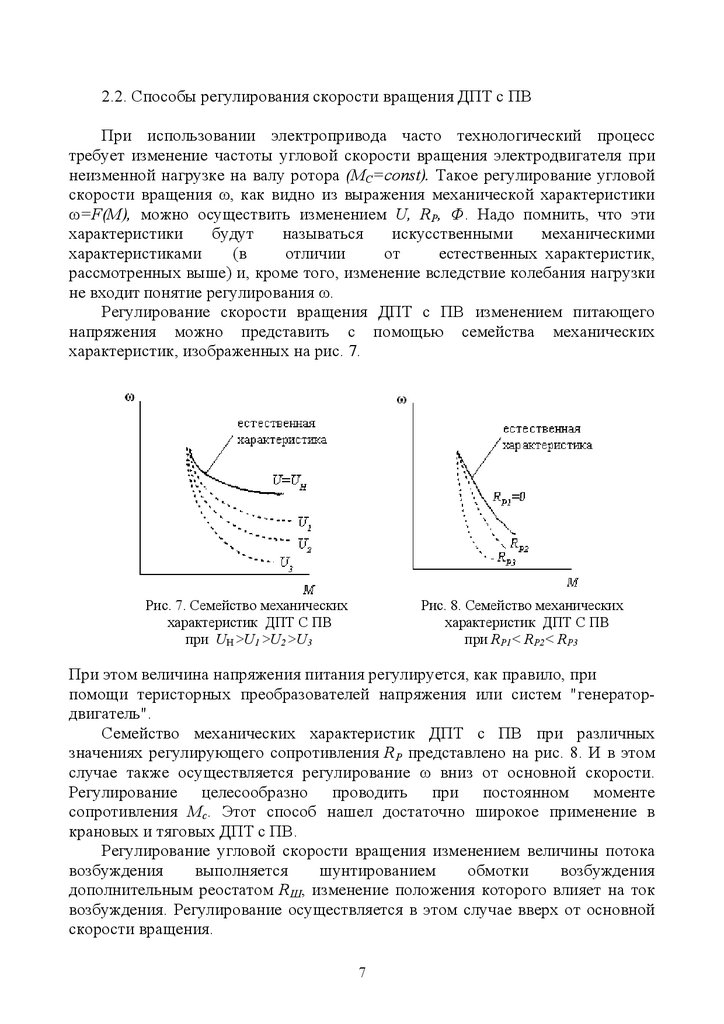
Регулирование скорости вращения ДПТ с ПВ изменением питающего
напряжения можно представить с помощью семейства механических
характеристик, изображенных на рис. 7.
Рис. 7. Семейство механических
характеристик ДПТ С ПВ
при UН >U1 >U2 >U3
Рис. 8. Семейство механических
характеристик ДПТ С ПВ
при RP1< RP2< RP3
При этом величина напряжения питания регулируется, как правило, при
помощи теристорных преобразователей напряжения или систем "генератордвигатель".
Семейство механических характеристик ДПТ с ПВ при различных
значениях регулирующего сопротивления RP представлено на рис. 8. И в этом
случае также осуществляется регулирование ω вниз от основной скорости.
Регулирование целесообразно проводить при постоянном моменте
сопротивления Мс. Этот способ нашел достаточно широкое применение в
крановых и тяговых ДПТ с ПВ.
Регулирование угловой скорости вращения изменением величины потока
возбуждения
выполняется
шунтированием
обмотки
возбуждения
дополнительным реостатом RШ, изменение положения которого влияет на ток
возбуждения. Регулирование осуществляется в этом случае вверх от основной
скорости вращения.
7
8.
2.3. Тормозной режим работы ДПТ с ПВ.Для ДПТ с ПВ возможно торможение противовключением и динамическое
торможение. Противовключение изменением полярности, подводимого к якорю
напряжения, производит интенсивное торможение и угловая скорость
вращения электродвигателя падает до нуля. Если в этот момент времени не
отключить двигатель от источника питания, то направление вращения
изменится на противоположное, т.е. двигатель реверсируется. Это безусловно
накладывает ограничения на применимость данного способа торможения. С
энергетической точки зрения этот способ торможения не экономичен, т.к.
большое количество энергии выделяется на
добавочном сопротивлении
Rр, которое необходимо включить в якорную цепь для ограничения бросков
тормозного тока. Достоинство способа -высокая эффективность торможения.
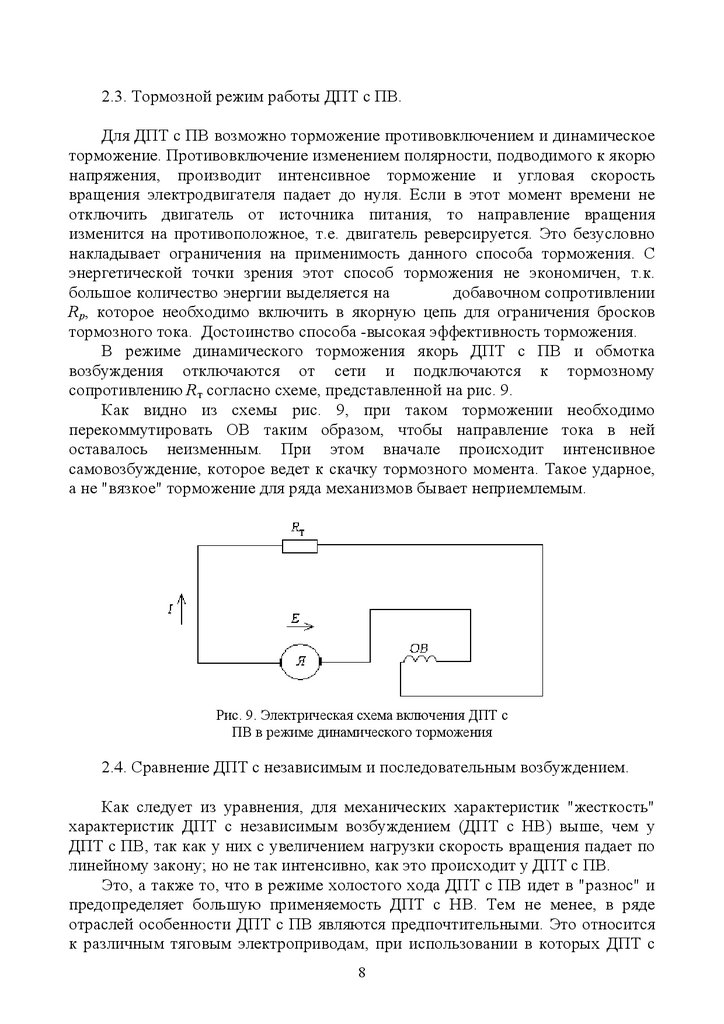
В режиме динамического торможения якорь ДПТ с ПВ и обмотка
возбуждения отключаются от сети и подключаются к тормозному
сопротивлению Rт согласно схеме, представленной на рис. 9.
Как видно из схемы рис. 9, при таком торможении необходимо
перекоммутировать ОВ таким образом, чтобы направление тока в ней
оставалось неизменным. При этом вначале происходит интенсивное
самовозбуждение, которое ведет к скачку тормозного момента. Такое ударное,
а не "вязкое" торможение для ряда механизмов бывает неприемлемым.
Рис. 9. Электрическая схема включения ДПТ с
ПВ в режиме динамического торможения
2.4. Сравнение ДПТ с независимым и последовательным возбуждением.
Как следует из уравнения, для механических характеристик "жесткость"
характеристик ДПТ с независимым возбуждением (ДПТ с НВ) выше, чем у
ДПТ с ПВ, так как у них с увеличением нагрузки скорость вращения падает по
линейному закону; но не так интенсивно, как это происходит у ДПТ с ПВ.
Это, а также то, что в режиме холостого хода ДПТ с ПВ идет в "разнос" и
предопределяет большую применяемость ДПТ с НВ. Тем не менее, в ряде
отраслей особенности ДПТ с ПВ являются предпочтительными. Это относится
к различным тяговым электроприводам, при использовании в которых ДПТ с
8
9.
ПВ развиваются большие пусковые моменты и имеется возможность плавногорегулирования скорости в широких пределах.
3. ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
Стенд состоит из электромеханического агрегата и приборного блока,
соединенных между собой по электрической схеме, представленной на лицевой
панели стенда. Электромеханический агрегат представляет собой два
состыкованных ДПТ. Один из них, исследуемый, ДПТ с ПВ (M1) типа МБМ3А, второй, нагрузочный, ДПТ с НВ типа Д-200. Номинальное напряжение
питания ДПТ U=27 В. Стенд подключается к трехфазной сети, имеющей
частоту 50 Гц напряжение 380 В.
Перевод обозначений на панели:
POWER - энергия
SERIES MOTOR - ДПТ с ПВ
SEPARATELY EXITED MOTOR - ДПТ с НВ
SUPPLY VOLTAGE - напряжение питания
STEP VOLTAGE - ступенчатое напряжение
TACHOMETER - тахометр
SPEED, rad/s - частота вращения, рад/с
POWER SUPPLY - источник питания
CURRENT SOURCE - источник тока
HAND CONTROL - ручное управление
СМРТ - компьютер
PHOTOELECTRIC TRANSDUSER - фотоэлектрический преобразователь
ARMATURE CURRENT - ток якоря
EXCITING CURRENT - ток возбуждения
ARMATURE VOLTAGE - напряжение якоря
ON - включено
OFF - выключено
DC MOTOR - двигатель постоянного тока
4. УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ РАБОТЫ
4.1. Проверить работоспособность стенда
Для этого последовательно выполнить следующее
Установить исходное состояние схемы лабораторного стенда, для этого:
- поставить все тумблеры на правой стороне лицевой панели в нижнее
положение, а тумблер на левой стороне лицевой панели должен находиться в
положении HAND CONTROL;
9
10.
-ввести добавочные сопротивления, выставив переключатели R1 и R2 вположение 10;
-переключатель S1 выставить в положение 1;
-включить сетевой автомат на левой боковине. При этом должен загореться
индикатор "POWER"
Проверить работоспособность ДПТ с ПВ - М1;
-включить S2 и QF2. Перемещая переключатель добавочного
сопротивления R1 от положения IO до нулевого положения и обратно в IO
убедиться что частота вращения двигателя М1 регулируется и индицируется на
индикаторе "SPEED" в рад/с;
-отключить QF2 и S2.
Проверить работоспособность ДПТ с НВ - М2;
-выставить потенциометром R3 по амперметру РА3 ток возбуждения,
равный 1.5 А;
-включить S4 и QF3. Перемещая переключатель добавочного
сопротивления R2 до нулевого положения и обратно до положения 10,
убедиться, что частота (скорость) вращения регулируется;
-отключить QF3 и S4.
Осмыслить физику процесса по электрической принципиальной схеме
представленной на лицевой панели лабораторного блока.
Примечание. ДПТ М1 и М2 должны запускаться при максимальных
значениях сопротивлений R1 и R2, т.е. R1=10 и R2=10.
4.2. Снять частотные характеристики ДПТ с ПВ (М1) путем изменения
сопротивления якорной цепи.
Семейство частотных характеристик ω=f(Iя) ДПТ с ПВ можно получить в
процессе изменения сопротивления якорной цепи с помощью ступенчатого
реостата R1, при неизменном напряжении питания двигателя. Причем, если
R1=0, то снимается естественная частотная характеристика, а при R1≠0
характеристики называют искусственными.
Для этого вначале необходимо выполнить исходное состояние схемы
лабораторного стенда (см. п. 4.1), а затем:
-с помощью реостата R3 установить по амперметру РА3 ток возбуждения
IВ=1.0 А (величину тока может указать преподаватель);
-включить QF2, S2 и установить переключатель R1 в положение 0.
Снять показания приборов РА1 и SPEED И занести их в табл. 1
-включить QF3 и изменяя сопротивление R2 от 10 до 0 снять 4-5 значений
по прибору РА1 и SPEED и занести их в табл. 1 (ток 4-5 значений по прибору
РА1 до 15 А). При этом двигатель М2 работает в режиме динамического
торможения;
-переключить R2 в положение 10, R1 в положение 1 и изменяя R2 от 10 до
0 снять 4-5 значений по приборам РА1, SPEED и занести в табл. 1;
-выполнить описанный выше пункт при R1 в положении 2;
10
11.
-отключить QF2, S2 и QF3.Таблица 1
Естественная характеристика
Искусственная характеристика
R1=0
I1=IЯ
ω
R1=1
R2=2
А
рад/с
Построить частотные характеристики ω=f(IЯ).
4.3 Снять частотные характеристики ДПТ с ПВ (Ml) при изменении
напряжения питания двигателя.
Семейство искусственных частотных характеристик ω=f(IЯ) для двигателя
M1 можно получить при ступенчатом изменении напряжения питания
электродвигателя посредством переключения S1 в положения 1...3 (описанный
ниже опыт выполнить 3 раза при S1 в положениях 1,2 и 3)
Для этого вначале восстановить исходное состояние схемы лабораторного
стенда(см. п. 4.1), а затем:
-с помощью реостата R3 установить по РА3 IВ=1.0 А (или другую величину
по указанию преподавателя);
-включить QF2, S2 и установить R1 в положение 1. Показания приборов
РА1 и SPEED занести в табл. 2;
-включить QF3 и изменяя R2 от 10 до 2 (для 3-4 положений) снять
показания приборов и занести в табл.2;
-установить R1 и R2 в положение 10 и отключить QF2, S2, QF3,
-включить QF2, S2 и установить R1 в положение 2, снять показания
приборов;
-включить QF3 и изменяя R2 от 10 до 2 (для 3-4 положений) снять
показания приборов;
-установить R1 и R2 в положение 10 и отключить QF2, S2 и QF3;
-включить QF2, S2 и установить R1 в положение 3. Снять показания
приборов;
-включить QF3 и изменяя R2 от 10 до 2 снять показания приборов для
любых 3-4 положений R2;
-установить R1 и R2 в положение 10 и отключить QF2, S2, QF3.
Построить частотные характеристики ω=f(IЯ)
11
12.
I1=IЯω
S1=1, UП=15В
А
рад/с
S1=2, Uп=22В
4.4.
Экспериментально
определить
зависимость
пропорциональности ДПТ с НВ (М2) от тока возбуждения IB2.
Таблица 2
S1=3, Uп=30В
коэффициента
В стенде вращающий момент исследуемого ДПТ с ПВ (M1) определяется
по моменту нагрузочного ДПТ с НВ (М2). При изменении тока возбуждения IВ2
двигателя М2 изменяется магнитный поток Ф, а следовательно, и коэффициент
пропорциональности к=сеФ=U/ω0 (см. теорию идеального холостого хода
двигателя) между током и моментом М двигателя. Для построения
механических характеристик ДПТ с ПВ необходимо предварительно знать
зависимость k от IВ2.
Для этого необходимо:
-восстановить исходное состояние лабораторного стенда (см.. п. 4.1)
-переключить S3 и S5 в верхнее положение, включить S2 и QF2. Выставить
по амперметру РА3 потенциометром R3 ток возбуждения IB2 = 1.5 A;
-включить S4 и QF3 для пуска М2 и выставить переключатель R2 в положение
0;
-переключением переключателя R1 добиться режима идеального холостого
хода двигателя М2, при котором ток якоря IЯ по амперметру РА2 должен
равняться нулю,
-значения по индикатору и по вольтметру RV2 занести в табл. 3;
-опыт повторить для других значений IВ2, представленных в табл. 3,
регулируя его значение потенциометром R3;
-переключатели R1 и R2 установить в положение 10;
-выключить QF2, S2, QF3, S4
.
Таблица 3
А
1.5
1.25
1.0
0.75
0.5
IВ2
ω0
рад/с
U
B
k
Определит коэффициент как
k = CeФ =
12
U
ω0
13.
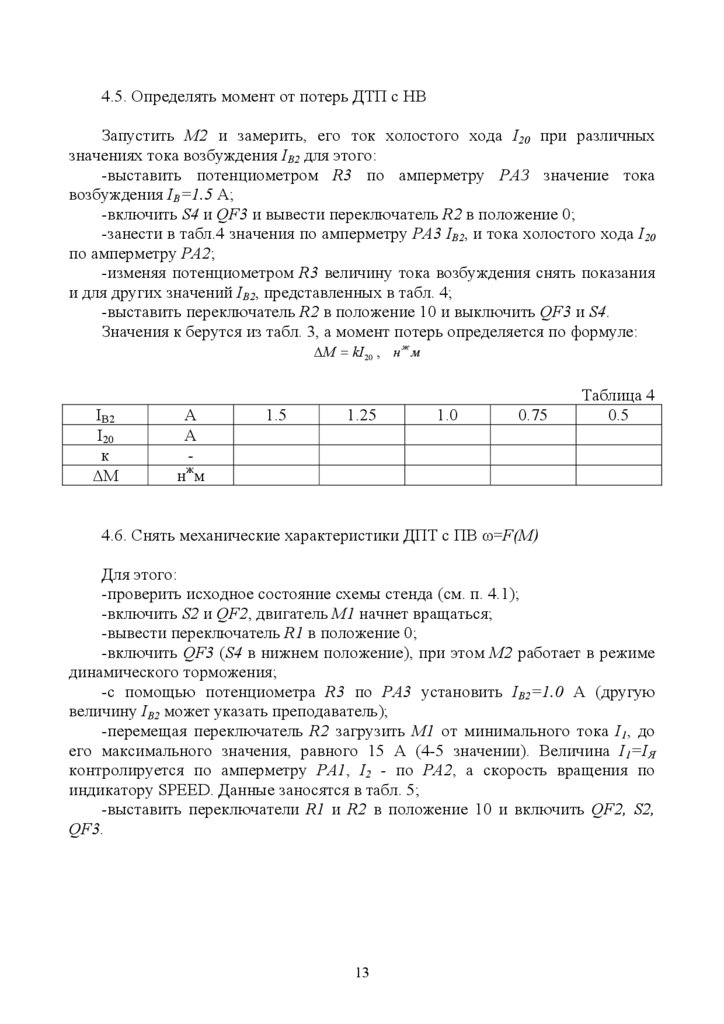
4.5. Определять момент от потерь ДТП с НВЗапустить М2 и замерить, его ток холостого хода I20 при различных
значениях тока возбуждения IВ2 для этого:
-выставить потенциометром R3 по амперметру РАЗ значение тока
возбуждения IВ=1.5 А;
-включить S4 и QF3 и вывести переключатель R2 в положение 0;
-занести в табл.4 значения по амперметру РА3 IВ2, и тока холостого хода I20
по амперметру РА2;
-изменяя потенциометром R3 величину тока возбуждения снять показания
и для других значений IB2, представленных в табл. 4;
-выставить переключатель R2 в положение 10 и выключить QF3 и S4.
Значения к берутся из табл. 3, а момент потерь определяется по формуле:
ΔM = kI 20 , н ж м
IВ2
I20
к
ΔM
А
A
ж
н м
1.5
1.25
1.0
0.75
Таблица 4
0.5
4.6. Снять механические характеристики ДПТ с ПВ ω=F(М)
Для этого:
-проверить исходное состояние схемы стенда (см. п. 4.1);
-включить S2 и QF2, двигатель М1 начнет вращаться;
-вывести переключатель R1 в положение 0;
-включить QF3 (S4 в нижнем положение), при этом M2 работает в режиме
динамического торможения;
-с помощью потенциометра R3 по РА3 установить IB2=1.0 А (другую
величину IB2 может указать преподаватель);
-перемещая переключатель R2 загрузить М1 от минимального тока I1, до
его максимального значения, равного 15 А (4-5 значении). Величина I1=IЯ
контролируется по амперметру РА1, I2 - по РА2, а скорость вращения по
индикатору SPEED. Данные заносятся в табл. 5;
-выставить переключатели R1 и R2 в положение 10 и включить QF2, S2,
QF3.
13
14.
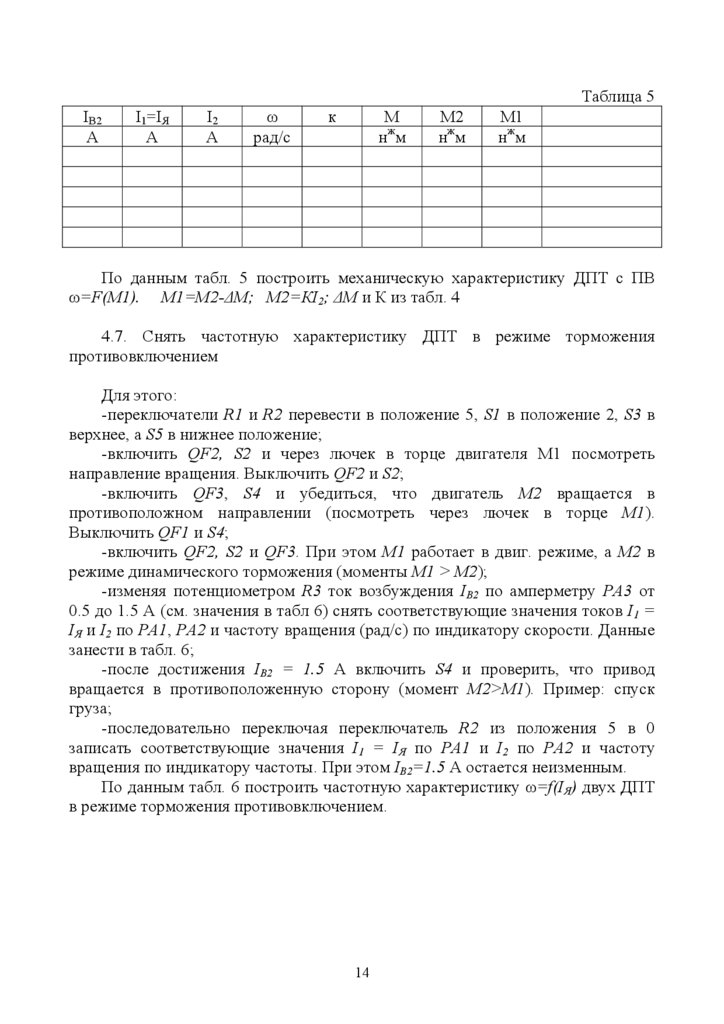
Таблица 5IВ2
А
I1=IЯ
А
I2
А
ω
рад/с
к
М
нж м
М2
нж м
М1
нж м
По данным табл. 5 построить механическую характеристику ДПТ с ПВ
ω=F(М1). М1=М2-ΔМ; М2=КI2; ΔМ и К из табл. 4
4.7. Снять частотную характеристику ДПТ в режиме торможения
противовключением
Для этого:
-переключатели R1 и R2 перевести в положение 5, S1 в положение 2, S3 в
верхнее, а S5 в нижнее положение;
-включить QF2, S2 и через лючек в торце двигателя М1 посмотреть
направление вращения. Выключить QF2 и S2;
-включить QF3, S4 и убедиться, что двигатель М2 вращается в
противоположном направлении (посмотреть через лючек в торце М1).
Выключить QF1 и S4;
-включить QF2, S2 и QF3. При этом М1 работает в двиг. режиме, а М2 в
режиме динамического торможения (моменты М1 > М2);
-изменяя потенциометром R3 ток возбуждения IB2 по амперметру РА3 от
0.5 до 1.5 А (см. значения в табл 6) снять соответствующие значения токов I1 =
IЯ и I2 по PA1, РА2 и частоту вращения (рад/с) по индикатору скорости. Данные
занести в табл. 6;
-после достижения IB2 = 1.5 А включить S4 и проверить, что привод
вращается в противоположенную сторону (момент М2>М1). Пример: спуск
груза;
-последовательно переключая переключатель R2 из положения 5 в 0
записать соответствующие значения I1 = IЯ по РА1 и I2 по PA2 и частоту
вращения по индикатору частоты. При этом IB2=1.5 А остается неизменным.
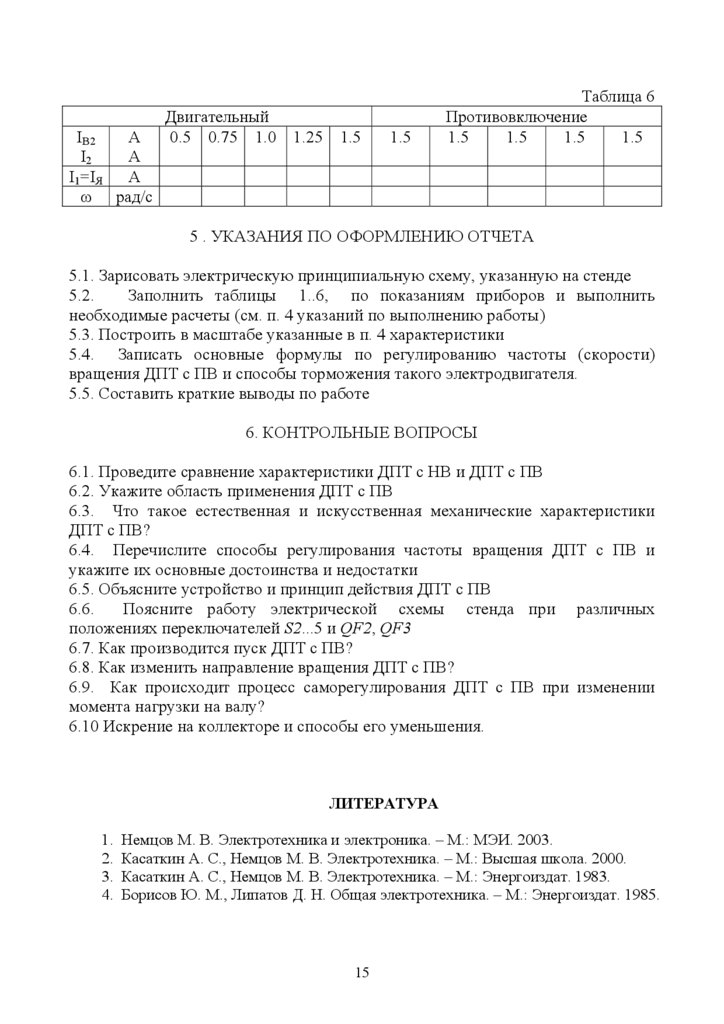
По данным табл. 6 построить частотную характеристику ω=f(IЯ) двух ДПТ
в режиме торможения противовключением.
14
15.
IВ2А
А
I2
I1=IЯ
А
ω рад/с
Двигательный
0.5 0.75 1.0 1.25
1.5
1.5
Таблица 6
Противовключение
1.5
1.5
1.5
1.5
5 . УКАЗАНИЯ ПО ОФОРМЛЕНИЮ ОТЧЕТА
5.1. Зарисовать электрическую принципиальную схему, указанную на стенде
5.2.
Заполнить таблицы 1..6, по показаниям приборов и выполнить
необходимые расчеты (см. п. 4 указаний по выполнению работы)
5.3. Построить в масштабе указанные в п. 4 характеристики
5.4. Записать основные формулы по регулированию частоты (скорости)
вращения ДПТ с ПВ и способы торможения такого электродвигателя.
5.5. Составить краткие выводы по работе
6. КОНТРОЛЬНЫЕ ВОПРОСЫ
6.1. Проведите сравнение характеристики ДПТ с НВ и ДПТ с ПВ
6.2. Укажите область применения ДПТ с ПВ
6.3. Что такое естественная и искусственная механические характеристики
ДПТ с ПВ?
6.4. Перечислите способы регулирования частоты вращения ДПТ с ПВ и
укажите их основные достоинства и недостатки
6.5. Объясните устройство и принцип действия ДПТ с ПВ
6.6.
Поясните работу электрической схемы стенда при различных
положениях переключателей S2...5 и QF2, QF3
6.7. Как производится пуск ДПТ с ПВ?
6.8. Как изменить направление вращения ДПТ с ПВ?
6.9. Как происходит процесс саморегулирования ДПТ с ПВ при изменении
момента нагрузки на валу?
6.10 Искрение на коллекторе и способы его уменьшения.
ЛИТЕРАТУРА
1.
2.
3.
4.
Немцов М. В. Электротехника и электроника. – М.: МЭИ. 2003.
Касаткин А. С., Немцов М. В. Электротехника. – М.: Высшая школа. 2000.
Касаткин А. С., Немцов М. В. Электротехника. – М.: Энергоиздат. 1983.
Борисов Ю. М., Липатов Д. Н. Общая электротехника. – М.: Энергоиздат. 1985.
15
16.
СОДЕРЖАНИЕ1. Цель работы..........................................................................................................3
2. Основные теоретические положения.................................................................3
2.1. Назначение, устройство и принцип действия ДТП.......................................3
2.2. Способы регулирования скорости вращения ДПТ с ПВ…………………...7
2.3. Тормозной режим работы ДПТ с ПВ..............................................................8
2.4. Сравнение ДПТ с независимым и последовательным
возбуждением..............................................................................................................8
3. Описание лабораторного стенда........................................................................9
4. Указания по выполнению работы......................................................................9
4.1. Проверить работоспособность стенда............................................................9
4.2.
Снять частотные характеристики ДПТ с ПВ (Ml) путем изменения
сопротивления якорной цепи...................................................................................10
4.3.
Снять частотные характеристики ДПТ с ПВ (Ml) при изменении
напряжения питания двигателя................................................................................11
4.4.
Экспериментально определить зависимость коэффициента
пропорциональности
ДПТ
с
НВ
(М2)
от
тока
возбуждения
IB2.................................................................................................................................12
4.5. Определить момент от потерь ДТП с НВ......................................................13
4.6. Снять механические характеристики ДПТ с ПВω=F(M)………………….13
4.7.
Снять частотную характеристику ДПТ в режиме торможения
противовключением………………………………………………………………..14
5. Указания по оформлению отчета.......................................................................15
6. Контрольные вопросы........................................................................................15
Литература..................................................................................................................15
16