


")




 software
softwareSimilar presentations:



")






Корреляционные методы. Модель формирования изображения
1. 5.4. Корреляционные методы Модель формирования изображения
Наблюдаемое изображение l(i,j)Эталонное изображение h(i,j)
l(i,j) = Zh{h(i,j)} + ξ(i,j) ,
Zh – оператор, воздействующий на изображение объекта (оператор искажений);
ξ (i,j) – нормальный белый шум.
2. Задача обнаружения объекта на нулевом фоне в присутствии гауссова шума
Модель формирования изображения:l(i,j) = h(i – α, j–β) + ξ(i,j) ,
3. Решение задачи обнаружения объекта на нулевом фоне в присутствии гауссова шума. Классический корреляционный алгоритм
F ( , )h(i, j ) l (i , j ),
, L
i , j H
50
F ( , )
100
150
200
250
300
50
100
150
200
250
300
350
( *, *) arg max F ( , )
4. Обнаружение объектов классическим корреляционным алгоритмом на реальных видеосюжетах (1)
Наблюдаемое изображение l(i,j)Эталонное изображение h(i,j)
F ( , )
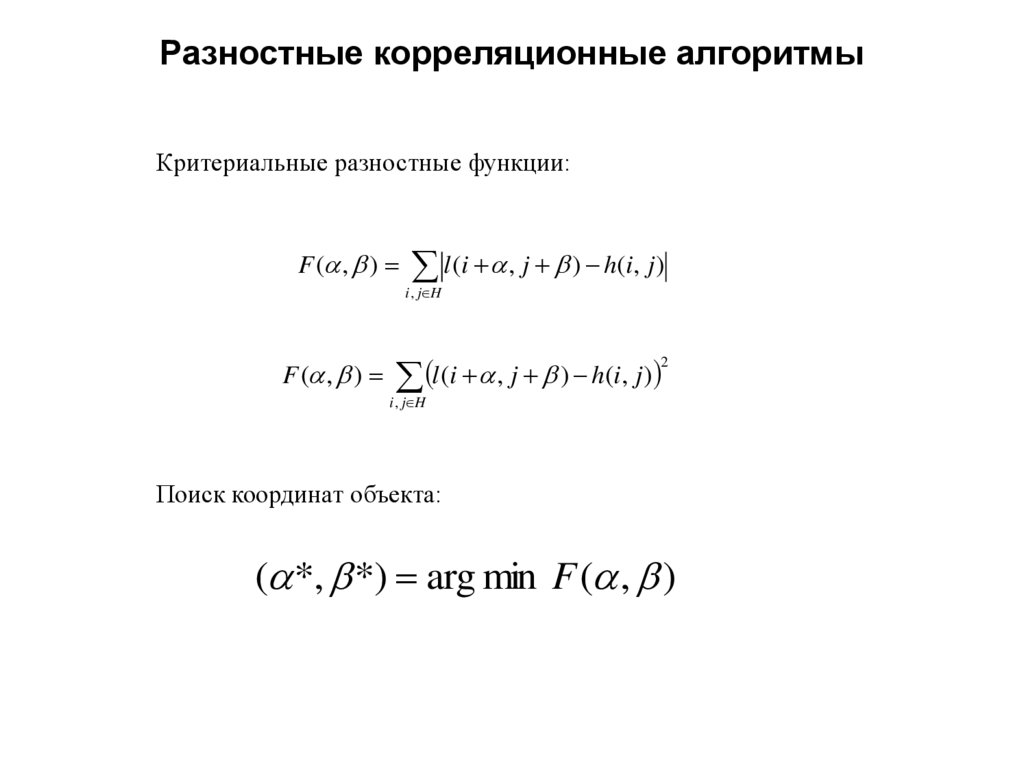
5.
Разностные корреляционные алгоритмыКритериальные разностные функции:
F ( , )
l (i , j ) h (i , j )
i , j H
F ( , )
2
l
(
i
,
j
)
h
(
i
,
j
)
i , j H
Поиск координат объекта:
( *, *) arg min F ( , )
6. Обнаружение объектов разностным алгоритмом на реальных видеосюжетах
Наблюдаемое изображение l(i,j)F ( , )
Эталонное изображение h(i,j)
F ( , )
7. Слежение за объектом без обновления эталона
Критериальнаяфункция
Fn ( , )
Получение оценок
координат объекта
l (i , j ) h (i, j)
i , j H
n
n
( *, *) arg min Fn ( , )
Обновление эталона
hn 1 (i, j ) hn (i, j )
Эталон
hn (i, j )
Критериальная
функция
Fn ( , )
Наблюдаемое
изображение
ln (i, j )
8. Слежение за объектом с покадровым обновлением эталона
Критериальнаяфункция
Fn ( , )
Получение оценок
координат объекта
l (i , j ) h (i, j)
i , j H
n
n
( *, *) arg min F ( , )
Обновление эталона
hn 1 (i, j ) ln (i , j )
Эталон
hn (i, j )
Критериальная
функция
Fn ( , )
Наблюдаемое
изображение
ln (i, j )
9. Слежение за объектом с фильтрацией эталона
Критериальнаяфункция
Fn ( , )
Получение оценок
координат объекта
l (i , j ) h (i, j)
i , j H
n
Эталон
n
( *, *) arg min F ( , )
Обновление эталона
hn 1 (i, j ) k ln (i , j ) (1 k )h(i, j )
k 0,2
hn (i, j )
Критериальная
функция
Fn ( , )
Наблюдаемое
изображение
ln (i, j )