. Типовые задачи")























 electronics
electronicsSimilar presentations:
")
")








Перспективные структуры современных цифровых электроприводов с двигателями переменного тока (АД, СД, ВД, ВИД)
1. Перспективные структуры современных цифровых электроприводов с двигателями переменного тока (АД, СД, ВД, ВИД). Типовые задачи
1Перспективные структуры
современных цифровых
электроприводов с двигателями
переменного тока
(АД, СД, ВД, ВИД).
Типовые задачи цифрового
управления.
2. Перспективные структуры. Типовые задачи цифрового управления.
2Перспективные структуры.
Типовые задачи цифрового управления.
1.
2.
3.
4.
5.
6.
7.
Модульный подход к построению цифровых систем
управления электроприводами
Концепция прямого цифрового управления
Современные структуры типовых комплектных
электроприводов
Программная реализация функций векторного управления в
приводах переменного тока
Типовые функции прямого цифрового управления элементами
силового канала и сопряжения с датчиками электрических и
механических величин
Перспективная элементная база ведущих мировых
производителей
Примеры отечественных разработок для комплектных
цифровых электроприводов
3. Модульный подход к построению цифровых систем управления
3Модульный подход к построению
цифровых систем управления
Комплектный электропривод
Электронный преобразователь
Сеть
~;=
Электродвигатели
АД с КЗ
ротором
Силовая часть
U,I
15В
Датчики
ВД с постоянными
магнитами
15В
Информационно-управляющая
часть
ВД с обмоткой
возбуждения
SPI, CAN
=100-700B
ДПР
5В
Источник
питания
24В
5В
Датчик
положения
ротора
Микроконтроллер
(МК)
5; 15;
15; 24В
0-5В 0-10В RS-485
-5...+5В 4-20мА CAN 2B
0-5мA
4-20мA
5В
24B
Дискретный
ввод-вывод
5В
Пульт
ВИД с независимым
возбуждением
24В
220В
5А
ВИД с
самовозбуждением
4. Модульный подход к построению цифровых систем управления
41) Интеграция МПС в силовой преобразователь – встроенная
цифровая система управления.
2) В перспективе - конструктивная интеграция силовой и
управляющей электроники с электромеханическими
преобразователями – мехатронные модули с интегрированной
электроникой.
3) Мультимикропроцессорные, распределенные системы управления
с унифицированными интерфейсами, в т. ч. позиционные и
контурные системы ЧПУ.
4) Модульное построение встроенных МПС (раз-интеграция) –
контроллер привода, пульт оперативного управления, контроллер
дискретного ввода/вывода, контроллер удаленного беспроводного
мониторинга и управления.
5. Концепция прямого цифрового управления: было
56. Концепция прямого цифрового управления: стало
67. Концепция прямого цифрового управления: стало
71) Интеграция специализированной периферии для управления
двигателями на кристалл микроконтроллера –
специализированные микроконтроллеры Motor Control.
2) Интеграция на кристалл микроконтроллера широкого спектра
периферийных устройств поддержки интерфейсов с системами
управления верхнего уровня – RS232, RS-485, CAN, Ethernet,
EtherCAT и др.
3) Интеграция на кристалл микроконтроллера периферийных
устройств поддержки межпроцессорных коммуникаций – SСI, SPI,
I2C и др.
4) Двух-ядерные микроконтроллеры – ARM ядро для поддержки
коммуникаций и DSP ядро для управления реального времени –
объединение преимуществ всех процессорных технологий в одном
устройстве.
8. Структура «Неуправляемый выпрямитель-Инвертор-Двигатель»
Структура8
«Неуправляемый выпрямитель-Инвертор-Двигатель»
9. Структура «Неуправляемый выпрямитель-Инвертор-Двигатель»
1) Типовая структура асинхронных частотно-регулируемыхприводов общепромышленных механизмов, насосов,
вентиляторов.
2) Интеграция в систему управления ПЧ ряда дополнительных
функций:
Управления вспомогательной дискретной автоматикой –
дискретный автомат управления приводом и режимами
работы технологической установки.
Регулирования технологической переменной – давления,
расхода, температуры и др. – регулятор технологической
переменной.
Оптимизации коэффициента мощности – корректор
коэффициента мощности.
Управления по часовым, суточным и недельным циклам –
управления по часам реального времени.
10. Структура «Активный выпрямитель-Инвертор-Двигатель»
10Структура «Активный выпрямительИнвертор-Двигатель»
11. Структура «Активный выпрямитель-Инвертор-Двигатель»
Структура «Активный выпрямительИнвертор-Двигатель»11
1) Возможность рекуперации энергии торможения привода в сеть
(грузовые лифты, шахтные подъемники, маховиковые накопители
энергии и т.д.).
2) Исключение потребления реактивной мощности и связанных с
ней потерь в сети.
3) Автоматическое поддержание коэффициента мощности на уровне
COS φ = 1 или на любом заданном уровне – работа в режиме
фильтро-компенсирующего устройства.
4) Использование либо двух микроконтроллеров, объединенных
локальной сетью, либо одного микроконтроллера с двумя
универсальными генераторами ШИМ-сигналов для управления
инвертором и активным выпрямителем.
12. Структура «Преобразователь DC/DC-Инвертор-Двигатель»
Структура «Преобразователь DC/DCИнвертор-Двигатель»12
13. Структура много-осевого электропривода с общим звеном постоянного тока
1314. Структура многосекционного вентильно-индукторного электропривода
Структура многосекционного вентильноиндукторного электропривода14
15.
15Какие вычислительные задачи решает микроконтроллер
для векторного управления электродвигателем?
БКП_1
РТ_d
d,q
Блок
ШИМ,
инвертор
Двигатель
РТ_q
Блок компенсации
перекрестных
связей
Eq
Ed
Ed LS iq
Eq LS id
ДПР
БКП_2
d,q
Обработчик
ДПР
БФП
sin/cos
умножение
Логические и
условные
вычисления
деление
Фильтр
сигнала
atan2
15
16. Перспективная элементная база для разработки серий цифровых систем управления электроприводами. Примеры отечественных
16Перспективная элементная база
для разработки серий цифровых
систем управления
электроприводами. Примеры
отечественных разработок
17. Большинство приложений требуют эффективных систем управления
17Сегодня приложений в области
управления в 5 раз больше, чем
приложений в области
телекоммуникаций
Промышленная автоматизация
Источники вторичного питания
Преобразователи энергии
Автомобильная промышленность
Офисная техника
Торговое оборудование
18. Специализированные микроконтроллеры
18Специализированные
микроконтроллеры
для управления
двигателями Motor
Control
Счетчики
Таймеры
Каналы сравнения
Каналы захвата
Процессоры событий
ШИМ-генераторы
Квадратурные декодеры
Интерфейсы передачи
данных
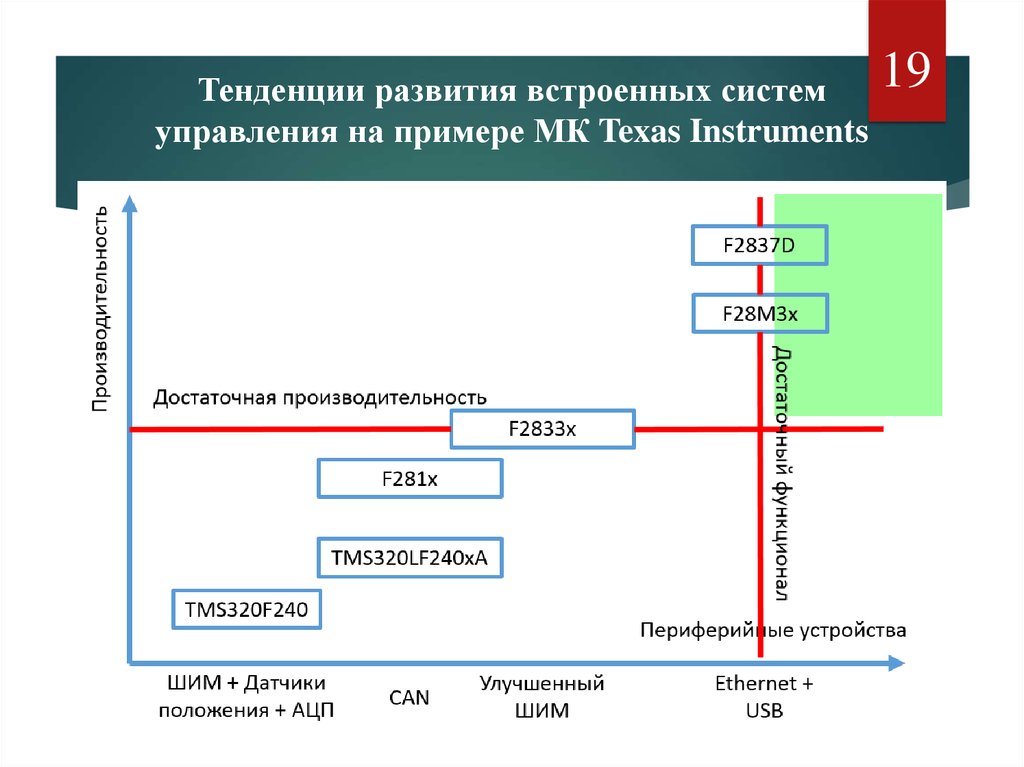
19.
Тенденции развития встроенных системуправления на примере МК Texas Instruments
19
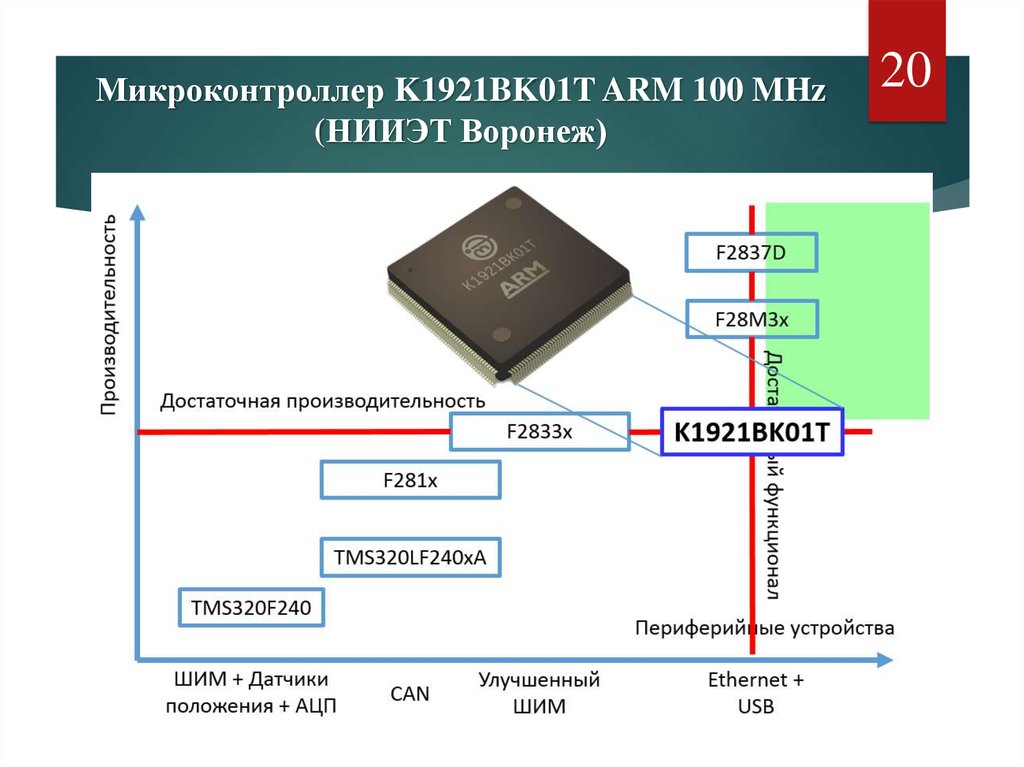
20.
Микроконтроллер K1921BK01T ARM 100 MHz(НИИЭТ Воронеж)
20
21.
Состав МК фирмы TI TMS320F2803521
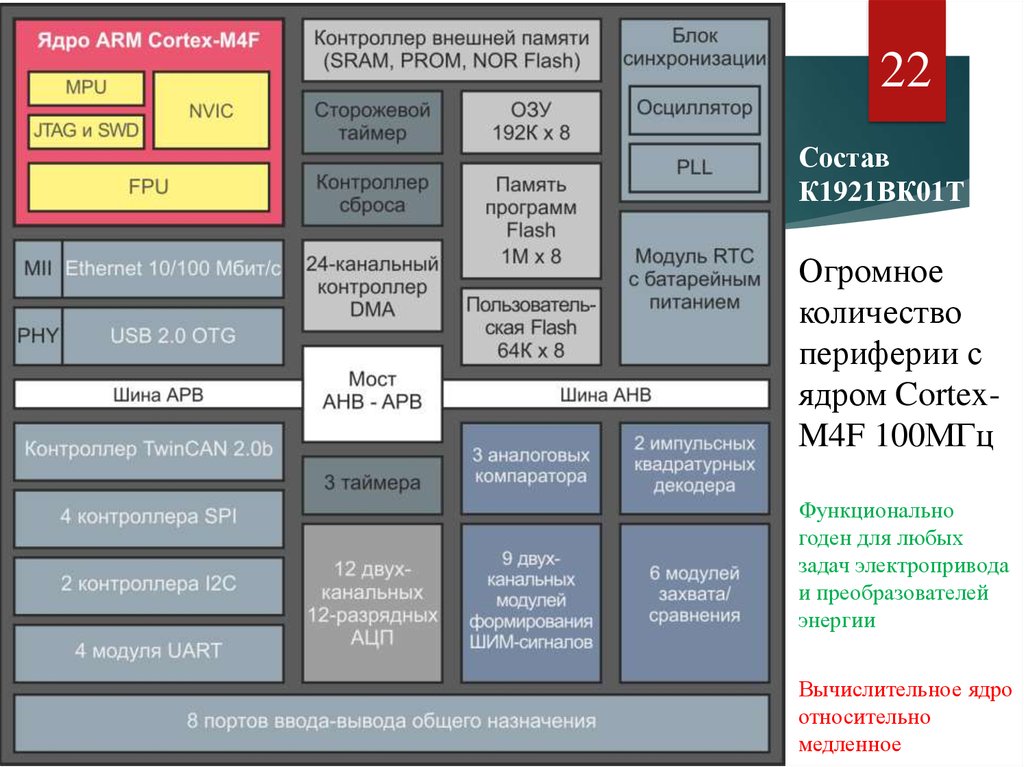
22.
22Состав
К1921ВК01Т
Огромное
количество
периферии с
ядром CortexM4F 100МГц
Функционально
годен для любых
задач электропривода
и преобразователей
энергии
Вычислительное ядро
относительно
медленное
23.
23Сравнение современных МК
К1921ВК01Т НИИЭТ
100МГц, ядро медленнее
TMS320F28335 TI
производительность
150 МГц, ядро C28 быстрее
18 каналов
ШИМ
12 каналов
23 канала, «12 медленных»
АЦП
12 каналов, «один быстрый»
2
QEP (квадратур. блок) 2
6
Блок захвата CAP
6
4/2/4/2
SPI / I2C / UART /
CAN
3/1/3/2
нет
ЦАП
нет
192 Кбайт
ОЗУ
68 Кбайт
1024 Кбайт
Flash
512 Кбайт
64 Кбайт
Польз. память
нет
1
USB
нет
1
Ethernet
нет
1
Часы
нет
24. Примеры разработок серий модульных микроконтроллерных систем управления для перспективных электроприводов
24Примеры разработок серий
модульных
микроконтроллерных
систем управления для
перспективных
электроприводов
25. Архитектура универсального контроллера привода
25Архитектура универсального
контроллера привода
Модули расширения функций
RS-232
Отладка в
реальном времени
RS-485
CAN
Модуль
питания
+5 V(D);
+5 V(A); +/-15 V(A);
+5 V(S); +12 V(DR);
Гальваническая
развязка
Волоконнооптические
приемники/
перед атчики
Селектор
формата
ввода сигнал а
Дифференциальные
приемники
Блок гальванически
развязанных интерфейсов
6 ВШИМ
2 ШИМ
2 ЗПР по
авариям
8
В одном из
стандартов:
+/-5 В;
+/-10 В;
+/-15 В;
0-5 В;
0-10 В;
0-15 В;
0-20 мА;
0-5 мА;
10 кОм
Блок интерфейса Потенциальные
с датчиками
3-6
положения
Триггеры
Ш митта
Блок сброса и
мониторинга
питания
Преобразовател ь
к формату АЦП
процессора
Блок управления
режимами и индикации состояния
Модуль энергонезависимой
памяти
Блок №1 ввода и
предварительной обработки
аналоговых сигналов
Преобразователи
уровня
МК Motor Control
Блок синхронного
Модуль
периферийного
часов
интерфейса SPI
реального
(или параллельного) времени
Блок
JTAGинтерфейса
Преобразовател ь
уровня
Центральный
процессор
Фил ьтр низ кой
частоты
Селектор
формата
ввода сигнал а
Модуль
расширения
встроенной
памяти
Защита от
перенапряжений
и перепол юсовки
Волоконнооптические
приемники/
перед атчики
Блок №2 ввода и
предварительной обработки
аналоговых сигналов
функций
контроллера
Блок №1 прямого цифрового
управления силовыми ключами
Блок тактового генератора
Модули расширения
д искретного и ана логового
ввод а/вывода
8
В одном из
стандартов:
+/-5 В;
+/-10 В;
+/-15 В;
0-5 В;
0-10 В;
0-15 В;
0-20 мА;
0-5 мА;
10 кОм
Преобразовател ь
к формату АЦП
процессора
2 ЗПР по
авариям
Фил ьтр низ кой
частоты
2 ШИМ
Защ ита от
перенапряжений
и перепол юсовки
6 ВШИМ
Гальваническая
развязка
Преобразовател ь
уровня
Блок
Блок №2 прямого цифрового
управления силовыми ключами расширения
Блок
ЦАП
4 (0-5 В или +/-5 В)
Блок дискретного
ввода/вывода
8/16
8/16
Дифференциальные
3
26.
Примеры современныхмикроконтроллеров
Texas Instruments
TMS320F2810 С28 150МГц
26
НИИЭТ
К1921ВК01Т ARM 100МГц
27.
Комплекты дляразработки
27