































































 informatics
informaticsSimilar presentations:





")




Системы управления и контроля
1. Системы управления и контроля
Доцент Сизов ЮрийАлександрович
2. Литература
• Э.И. Медякова Физические основы измерений.СЗПУ 2008г.
• Гришин Рачков М.Ю. Физические основы
измерений МГИУ 2008г.
• Управление техническими системами под ред.
В.И. Харитонова Форум м:. 2010г.
• Г.Д. Бурдун, В.Н. Марков Основы метрологии м.
1985г.
• П.В. Новицкий, И.А. Зограф. Оценка погрешностей
результатов измерений. Энергоиздат 1985г.
3.
Технические измерения в машиностроенииСистемы
автоматического
контроля
• Основные термины
пределения
Пассивные системы автоматического контроля
4.
Измерение – нахождение значения физической величиныопытным путем с помощью средств измерений.
Погрешность измерения – отклонение результата
измерения от истинного значения измеряемой величины.
.
Измерительный преобразователь – СИ, осуществляющее
преобразование одной физической величины в другую и
предназначенное для выработки сигнала измерительной
информации в форме, удобной для передачи, дальнейшего
преобразования, обработки и (или) хранения, но не
поддающейся непосредственному восприятию
наблюдателем.
5.
Измерительная система – совокупность СИ, соединенныхмежду собой каналами вязи, предназначенная для
выработки сигналов измерительной информации в
форме, удобной для автоматической обработки,
передачи и (или) использования в автоматических
системах управления.
Датчик – конструктивная совокупность одного или
нескольких измерительных преобразователей и
сопутствующих им конструктивных элементов
6.
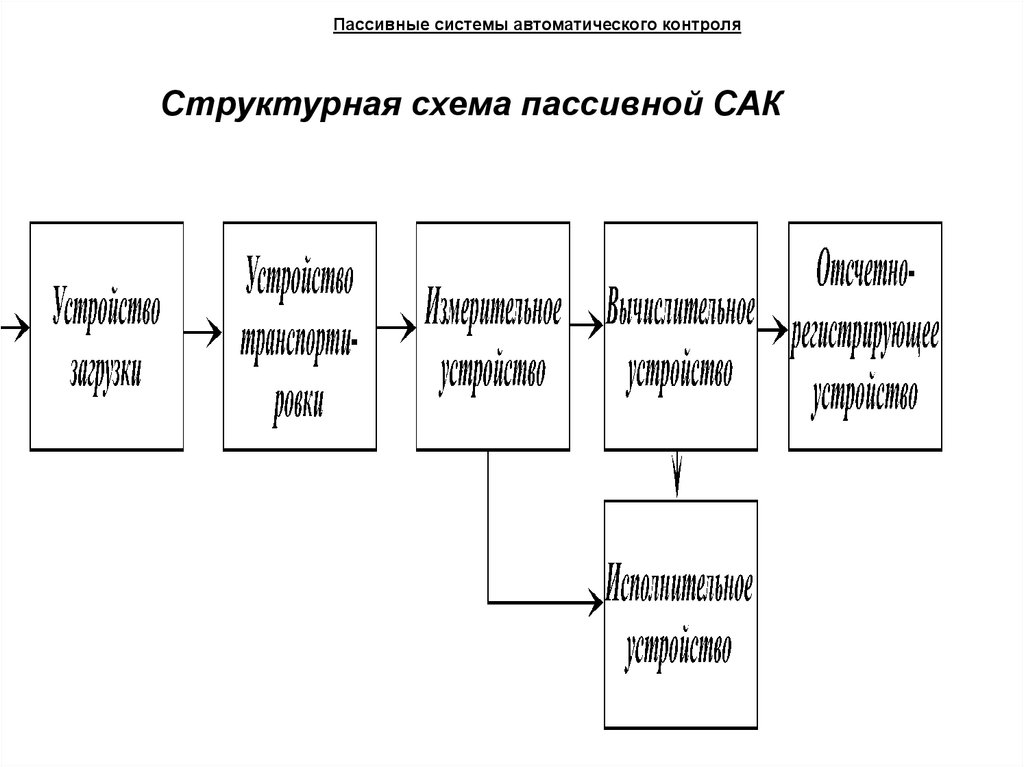
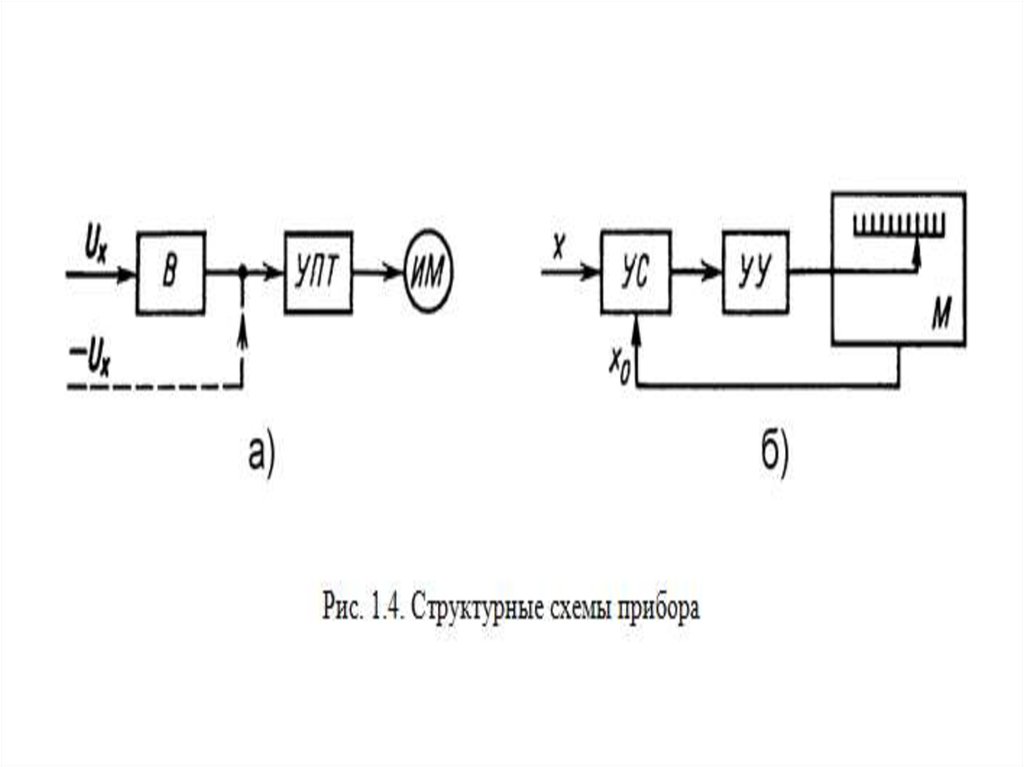
Пассивные системы автоматического контроляСтруктурная схема пассивной САК
7.
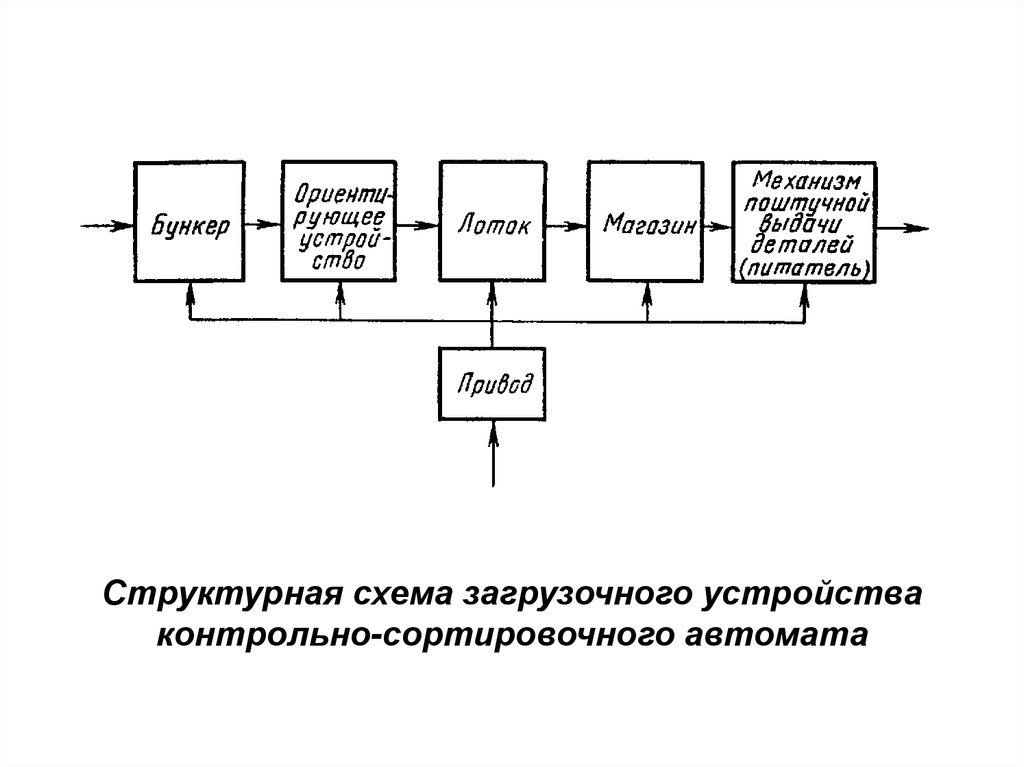
Структурная схема загрузочного устройстваконтрольно-сортировочного автомата
8.
. Устройствозагрузки
9.
Схема устройства транспортировки спрямолинейным перемещением детали
10.
. Схема для комплексной двухпрофильной проверкизубчатых колес
11.
Схема устройства автоматическогоконтроля и сортировки поршневых колец
12.
13.
Схема вычислительного устройства на баземикроконтроллера
14.
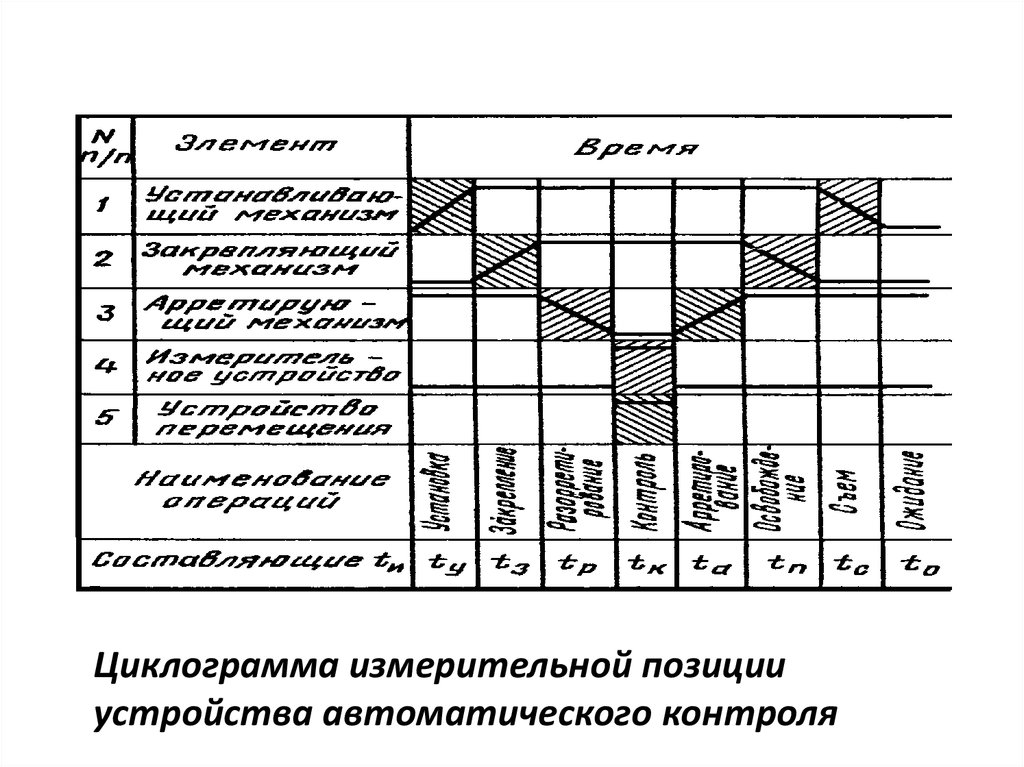
Циклограмма измерительной позицииустройства автоматического контроля
15.
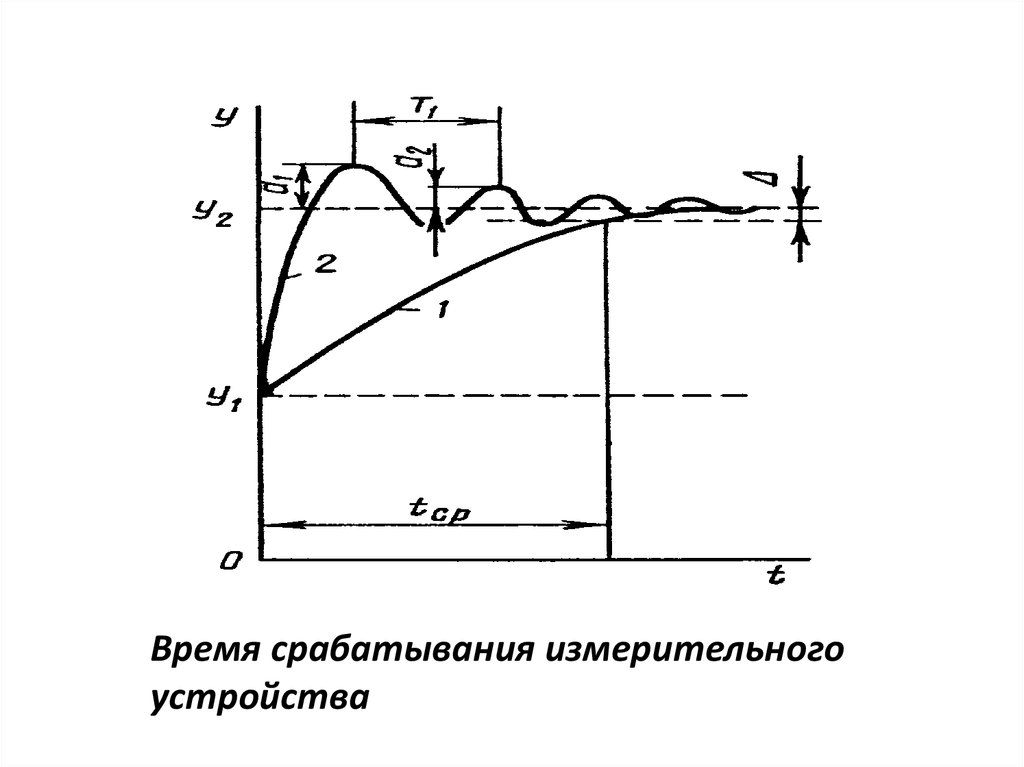
Время срабатывания измерительногоустройства
16.
Техническиеизмерения и приборы
Основные сведения об
измерениях
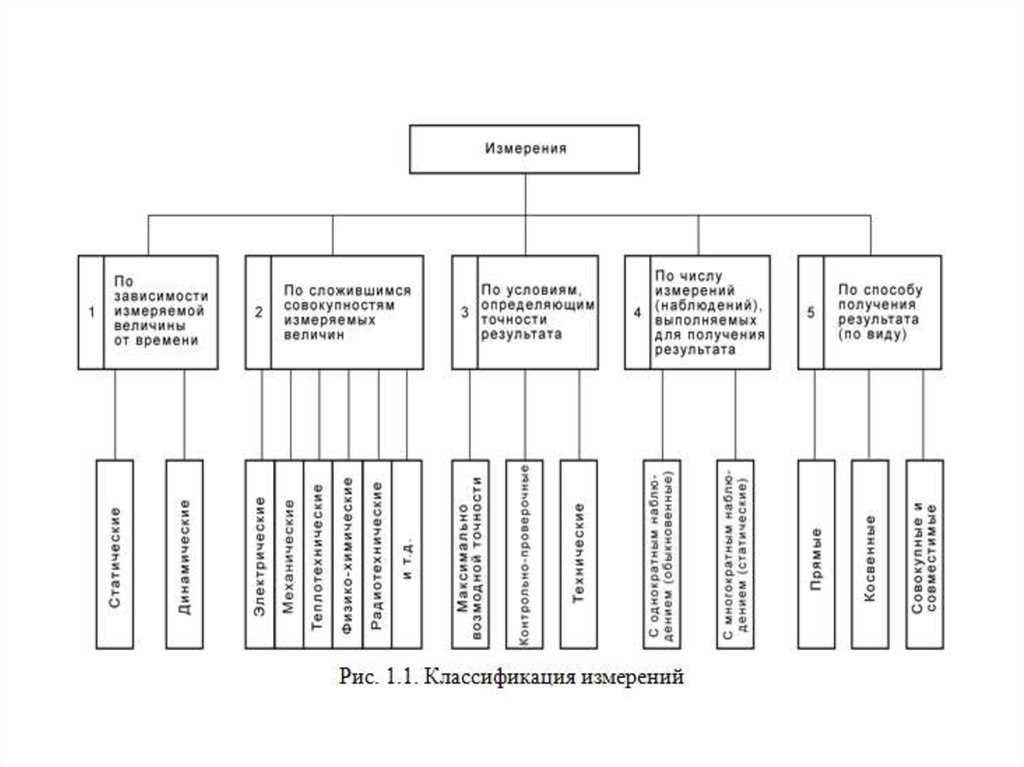
Классификация измерений
17.
18.
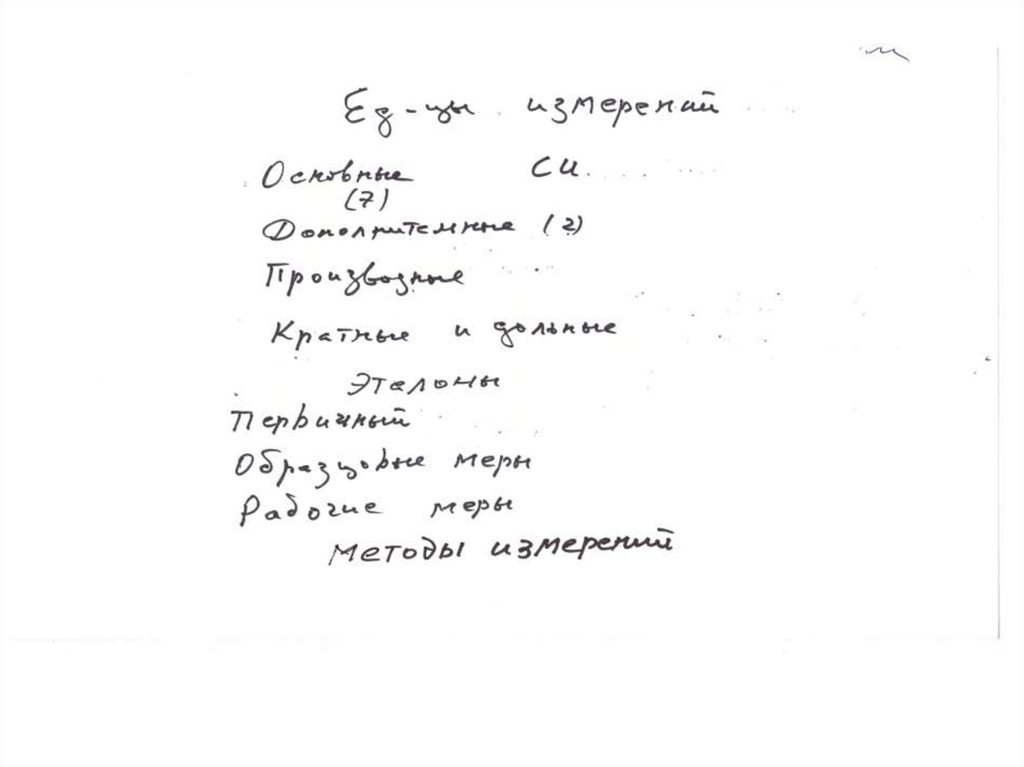
19. ЕДИНИЦЫ ИЗМЕРЕНИЙ
20.
21.
22.
К совокупным относятся производимыеодновременно измерения нескольких
одноименных величин, при которых
искомые значения величин находят
решением системы уравнений,
получаемых при прямых измерениях
различных сочетаний этих величин.
23.
Совместные измерения – этопроизводимые одновременно
измерения двух или нескольких
неодноименных величин для
нахождения зависимости между
ними.
24.
R t1 = R 0 (1 + αt1 + βt );2
R t 2 = R 0 (1 + αt 2 + βt 2 );
2
R t3 = R 0 (1 + αt 3 + βt 3 ).
2
1
Решая эту систему относительно R0, α и
β, получаем значения искомых величин.
Это пример совместных измерений.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
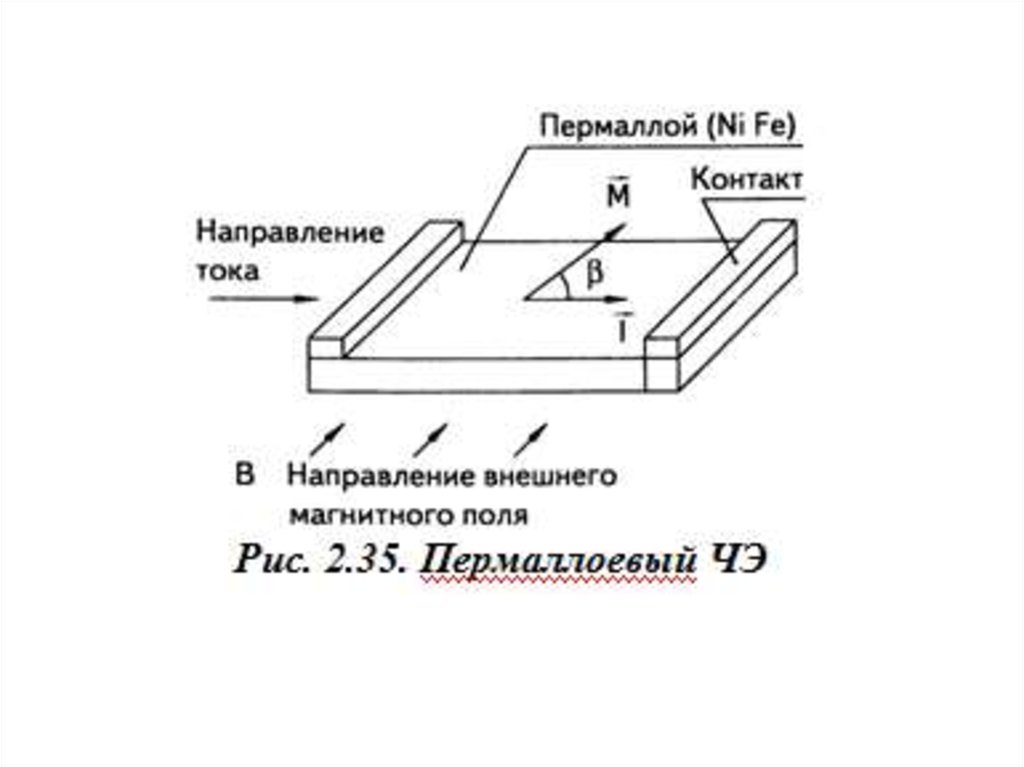
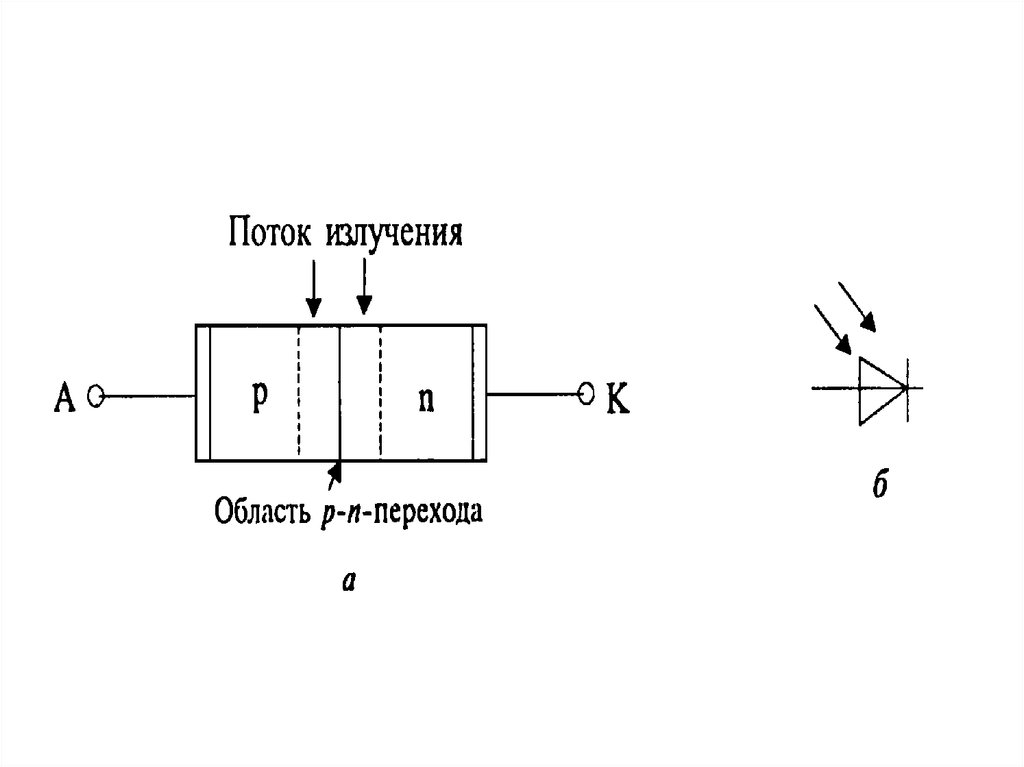
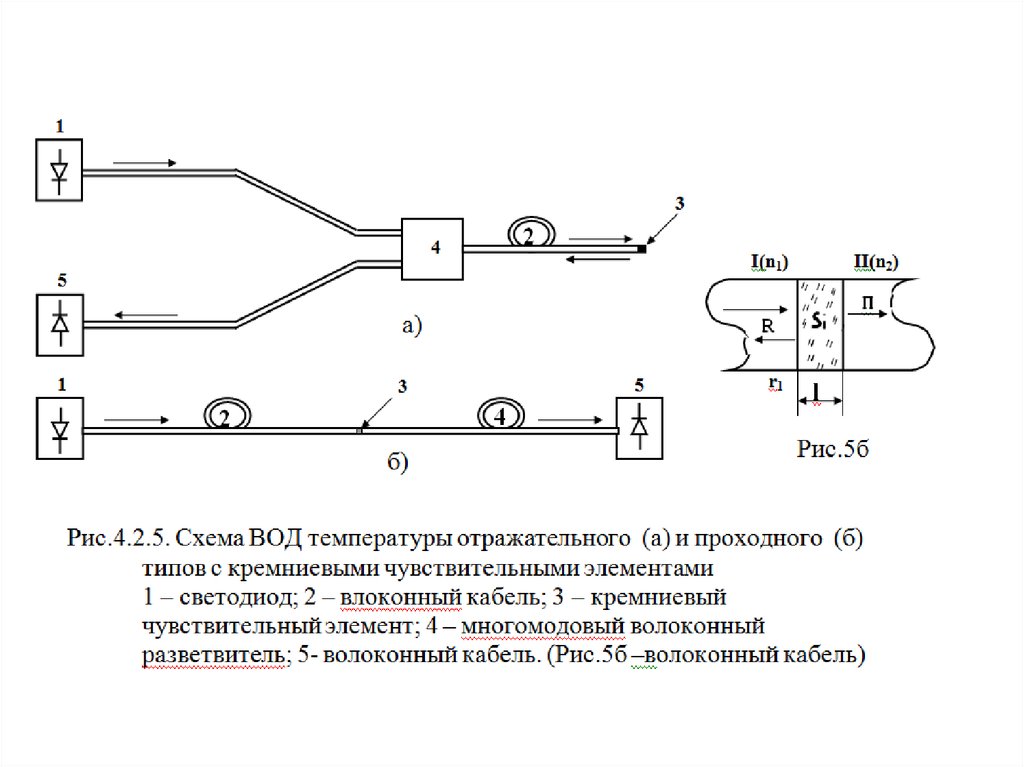
В соответствии с физическим принципом, положенным воснову преобразования информации, различают следующие
основные типы чувствительных элементов:
резистивные;
электромагнитные;
гальваномагнитные;
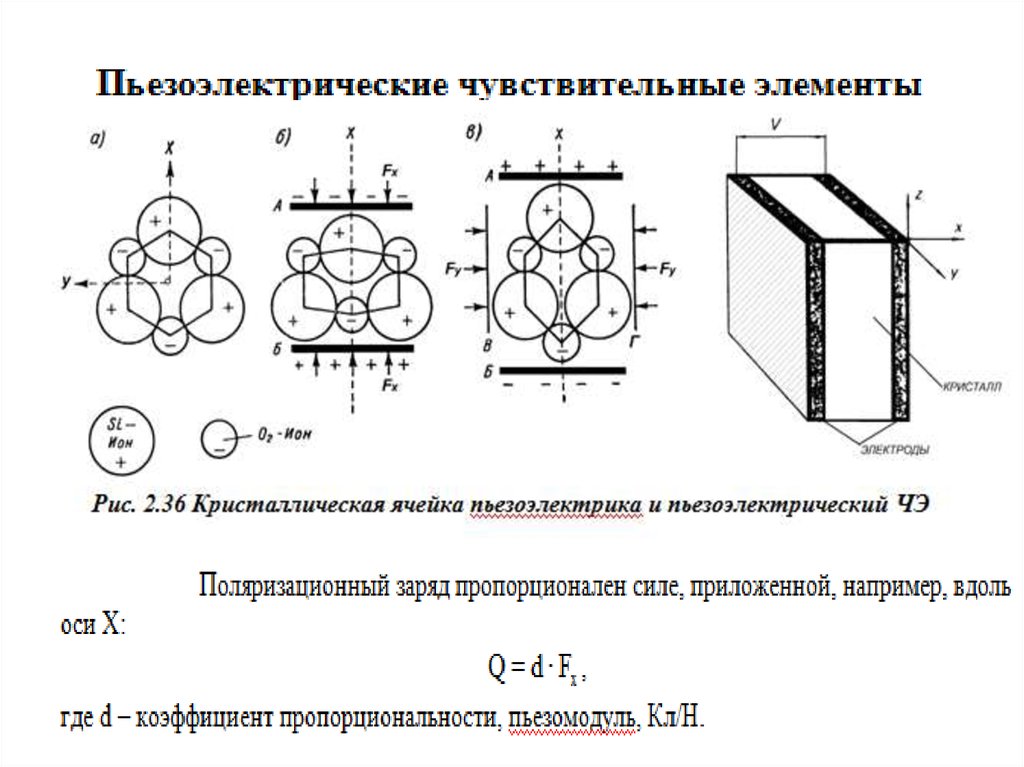
пьезоэлектрические;
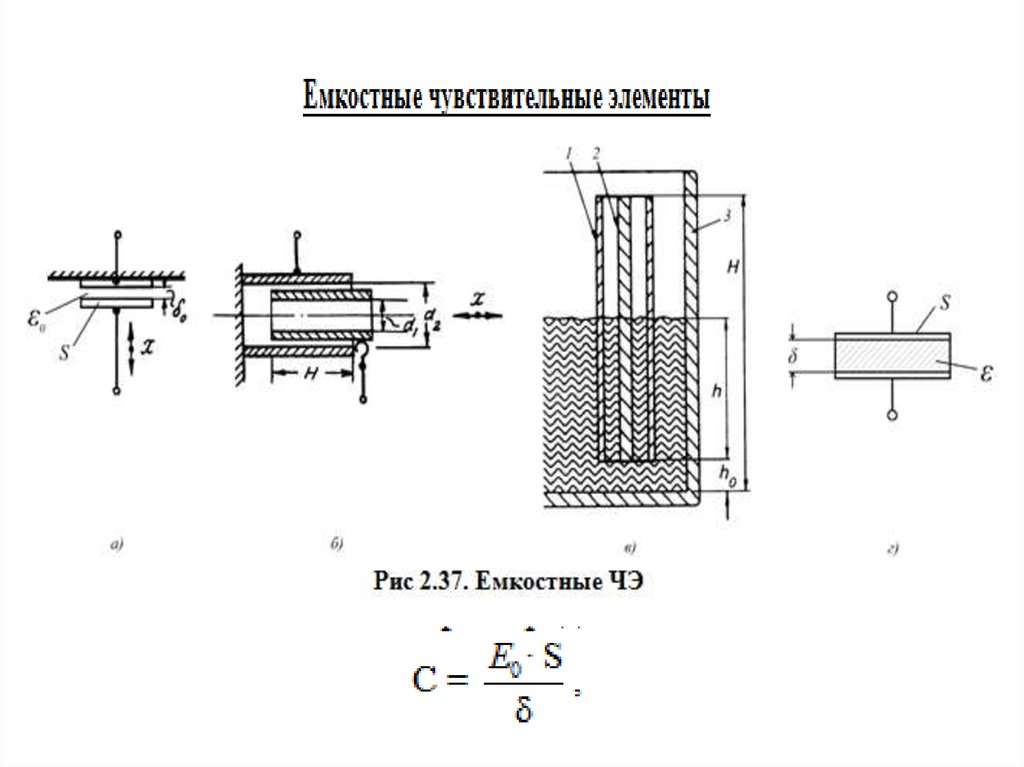
емкостные:
тепловые:
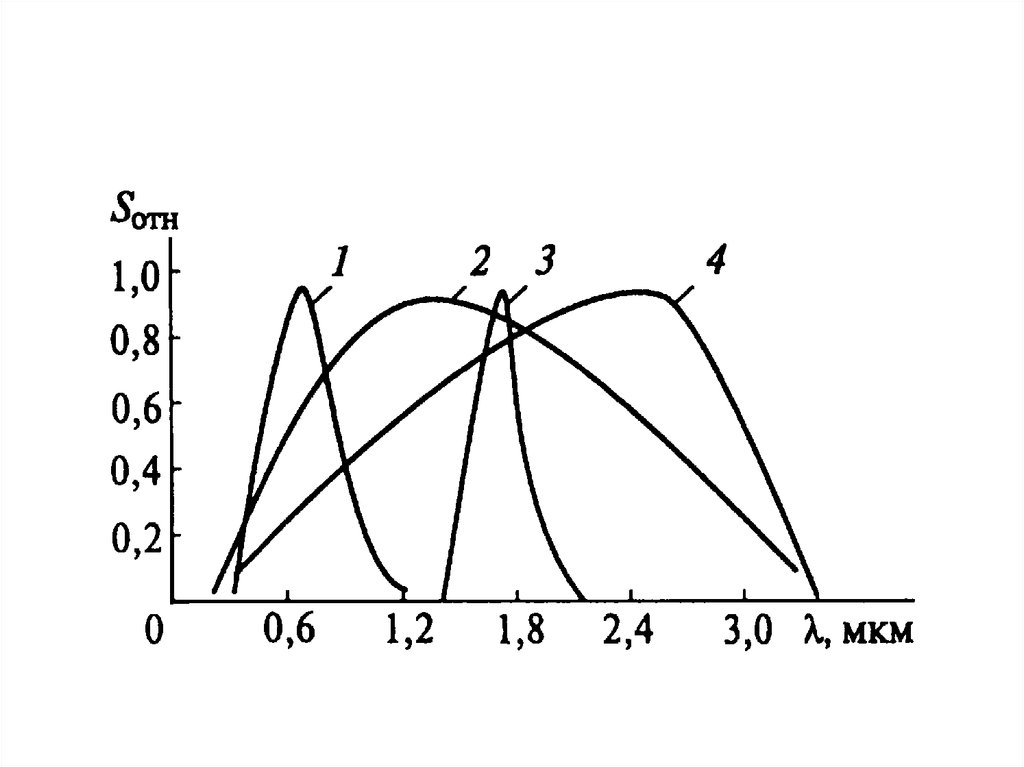
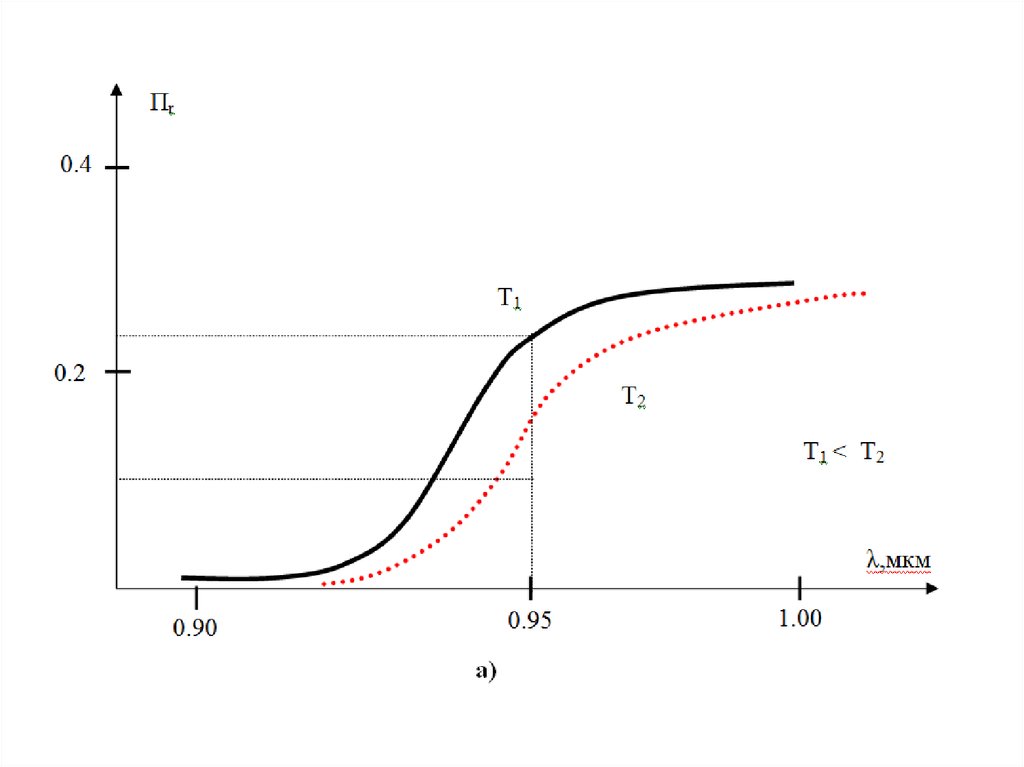
оптические.
Чувствительные элементы делятся на пассивные
(параметрические) и активные (генераторные).
49.
50.
51.
lR = ρ
S
,
где ρ, l, S – удельное электросопротивление, длина и
сечение проводника соответственно.
Удельное сопротивление ρ зависит от изменения
температуры:
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
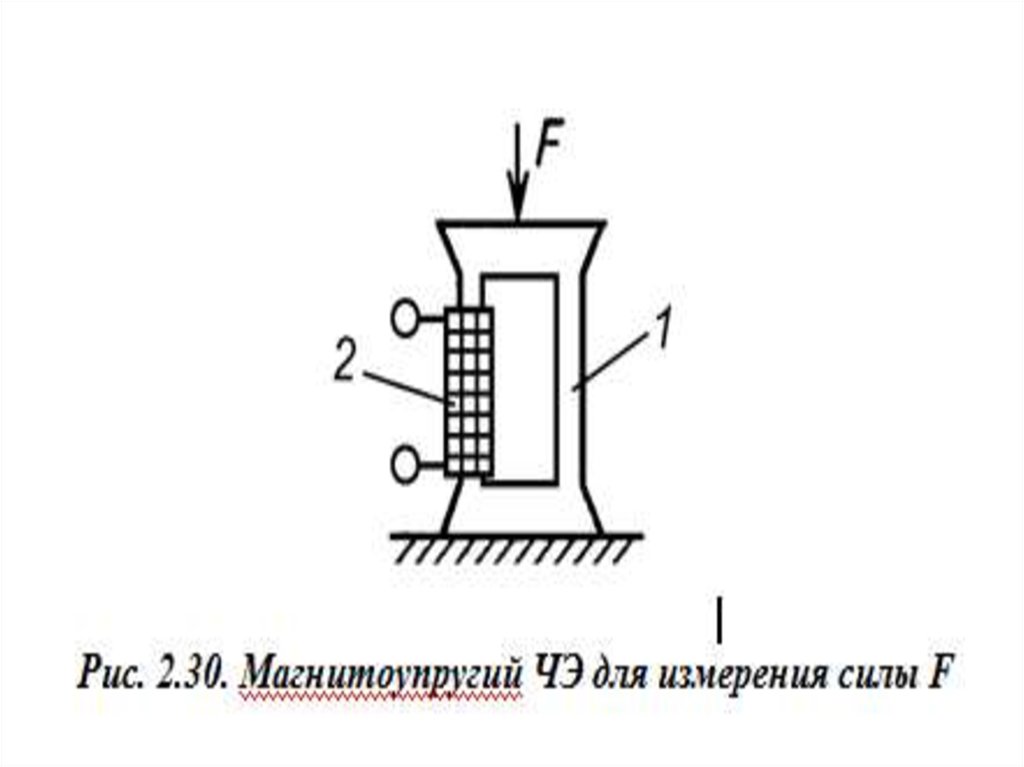
Выходным сигналом датчика является сила тока I вобмотке:
I y = Uı / z,
(12)
где U1 – напряжение источника питания датчика; z –
полное сопротивление обмотки;
z= √R²+(2πƒL)² (здесь R – омическое сопротивление
обмотки; ƒ – частота тока).
Индуктивность обмотки:
L=2πw² S *10-5/δ,
(13)
где w – число витков обмотки; S – площадь поперечного
сечения магнитопровода, м²; δ – воздушный зазор, м.
Активное сопротивление обмотки R намного меньше
индуктивного сопротивления, т.е. R <<2 πƒL, поэтому
можно считать z в выражении (12) и принимая во
внимание, что
δ = x, получаем
63.
U1 * 105I y=_______________x.
4π²ƒw²S
(14)
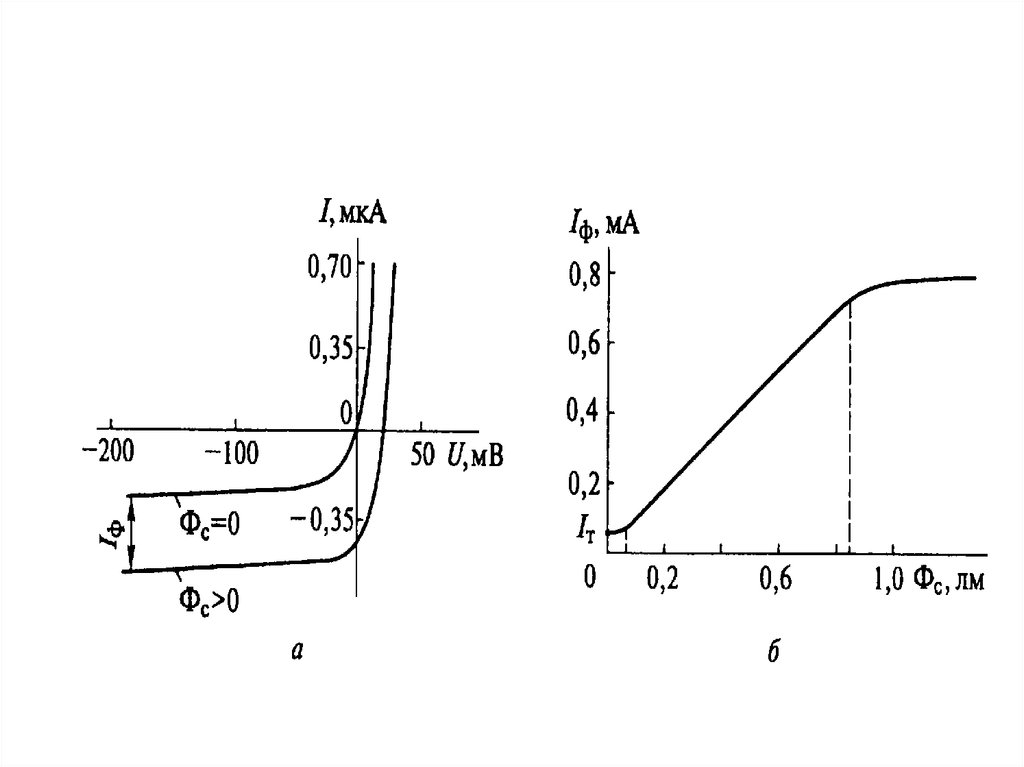
Статическая характеристика индуктивного датчика перемещения
показана на рис. 4,6. Линейность характеристики I = ƒ(δ) сохраняется
только в пределах некоторой области изменения измеряемой величины x
и нарушается, когда активное сопротивление обмотки становится
сравнимым с индуктивным – при большом зазоре δ или при малом
зазоре вследствие наличия тока холостого хода.
Коэффициент чувствительности индуктивного датчика перемещения
U1*105
Κч=__________
4π2ƒw2S
(15)
64.
65.
66.
67.
68.
69.
70.
71.
72.
73.
74.
75.
76.
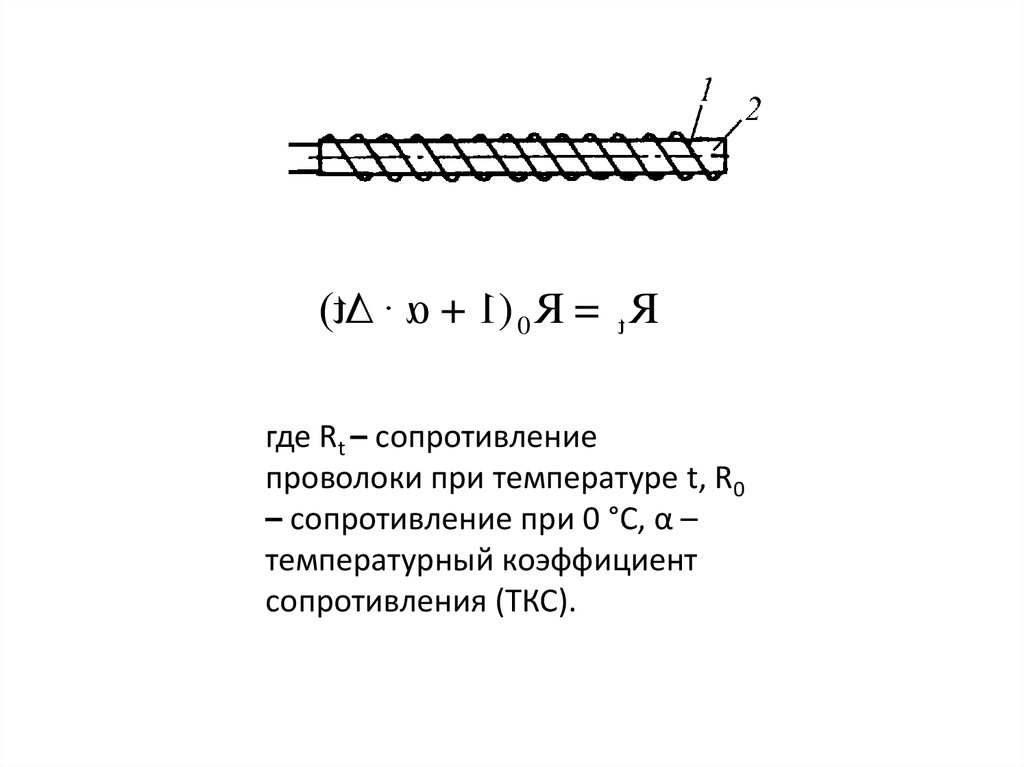
)tΔ · α + 1( 0 R = t Rгде Rt – сопротивление
проволоки при температуре t, R0
– сопротивление при 0 °С, α –
температурный коэффициент
сопротивления (ТКС).
77.
78.
79.
80.
81.
82.
83.
84.
85.
86.
87.
88.
89.
90.
91.
92.
93.
94.
95.
96.
Измеряемаявеличина
Основные параметры
Темпера
тура, К
Диапазон измерения
70-350
Давление,
атм
0-50
Погрешность
измерения, %
Удаленность
объекта контроля,
км
Масса
чувствительного
элемента, г
Габаритные размеры
чувств. элемента (не
более), мкм
0,5
0,5
0,5
<5
1
1
1
1
1
1
<6
<6
<6
<6
<6
<6
12x6x6
15x7x7
12x5x5
12x6x6
12x5x5
12x5x5
Срок службы АМРВОД 10000 час.
Ускорен
ие, g
0,01-10
Водород
%
содерж.
0-2
Магнитн Электри
ое поле ческий
H, Э
ток J,А
0,0010,1-1000
100
<1
<1
97.
СхемаP
волоконно-оптического
автогенератора
Выход
fi
1
f i f rel
t
2
f rel T
4
T
3
1
fi
•Волоконный лазер
•Составные микрорезонаторы
•Отрезки одномодовых волоконных кабелей
•Выходное полупрозрачное зеркало
98.
Режим работы…………………………………………....импульсный
Средняя мощность излучения, мВт…………………..
Глубина модуляции, %…………………………………
Скважность выходных импульсов……………………
Период
следования
выходных
оптических
импульсов,
с…………………………………………….
Диапазон частот fi акустических
колебаний микрорезонатора,
кГц………………………………….
Длина волны излучения, мкм………………………….
Ширина линии генерации, нм…………………………
Долговременная нестабильность выходной мощности в течение 8 ч,
%…………………………….
RIN (в частотном диапазоне (1…103) кГц), % ………
Допустимый диапазон изменения частоты акустических колебаний
микрорезонатора, | fi/ fi|…..
Уровень флуктуаций частоты автоколебаний (при акустической
добротности
микрорезонатора
в
воздухе
Q
=
100)………………………………………..
Напряжение питания, В……..………………………...
Потребляемый ток, А…………………………………..
*Габаритные размеры, мм3…………………………….
Масса, г …………………………………………………
Срок службы ВОА, ч…………………………………...
………...1…5
…………>80
……….1…10
.……..Т = 1/ fi
…….10…400
…………1,54
…...0,05…0,2
………...1…2
…………..0,5
………... 0,1
……. 2 10-5
……….8 0,3
……...0.3 1
.120 120 20
………….300
………….104