

")
")
")
")
")












 mechanics
mechanicsSimilar presentations:


")







Кинематическая схема привода технологической машины. Обозначения элементов привода на кинематических схемах
1. Прикладная механика
ДавидовичИгорь Юрьевич
(курс лекций)
Кинематическая схема привода
технологической машины.
Обозначения элементов привода
на кинематических схемах.
к. 205, корпус 1, т. 80222410512
E-mail: igor_davidovich@tut.by
1
2. Источник движения
м2
3. Передача гибкой связью (клиноременная)
34. Передача зацеплением (цепная)
xx
4
5. Передача зацеплением (зубчатая цилиндрическая)
xx
5
6. Передача зацеплением (зубчатая коническая)
67. Передача зацеплением (червячная)
78.
МУФТЫжесткая
упругая
8
9.
Цилиндрический редукторЦР
9
10.
Конический редукторКР
10
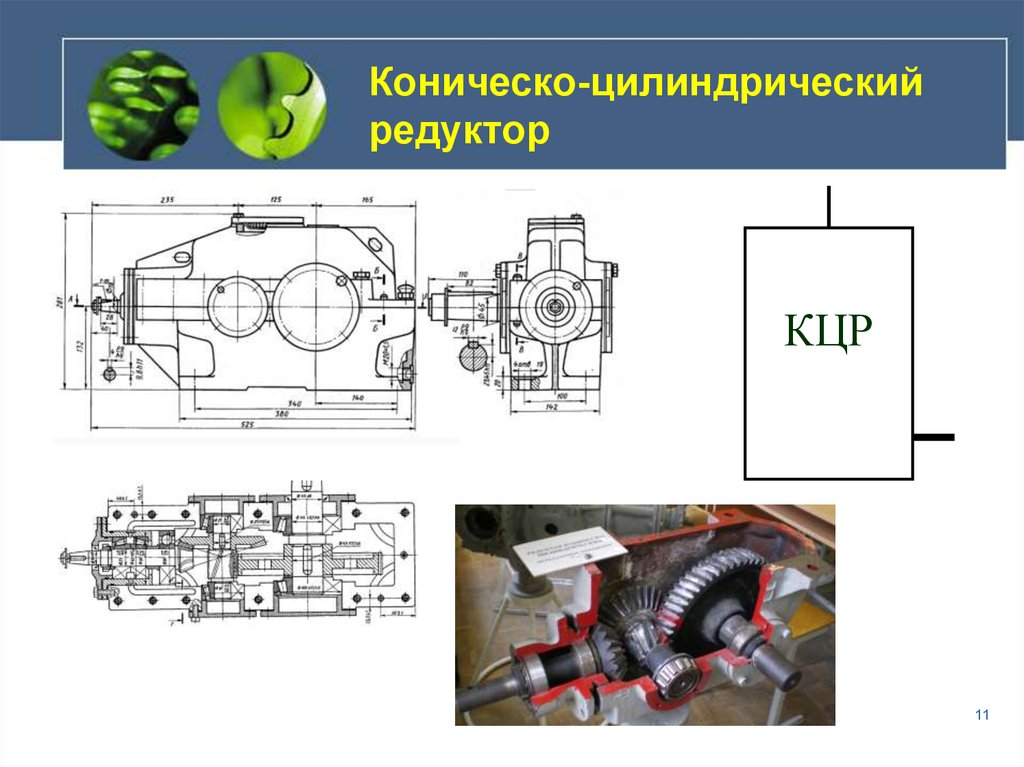
11.
Коническо-цилиндрическийредуктор
КЦР
11
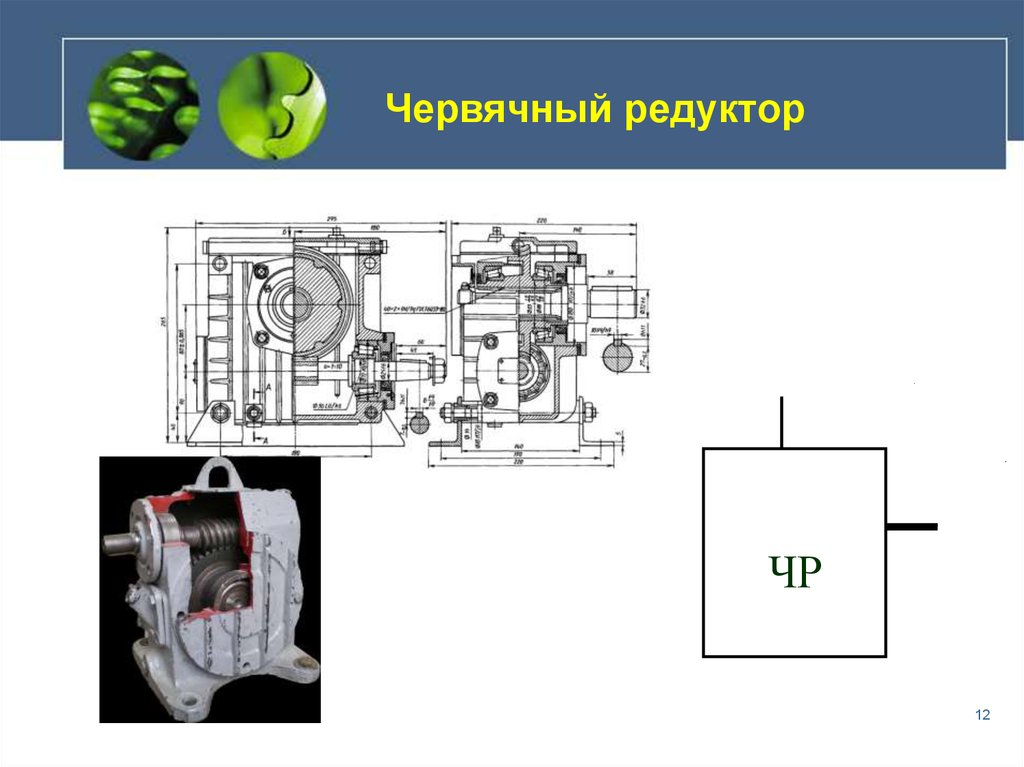
12.
Червячный редукторЧР
12
13.
Рабочие органы машинЦепной транспортер
x
x
x
x
Обозначение на кинематической схеме
13
14.
Рабочие органы машинЛенточный транспортер
Обозначение на кинематической схеме
14
15.
Рабочие органы машинВинтовой (шнековый) транспортер
а – горизонтальный транспортер
б - вертикальный транспортер
Обозначение на кинематической схеме
15
16.
Рабочие органы машинГрузоподъемное устройство (таль)
m
Обозначение на кинематической схеме
16
17.
Кинематическая схема приводам
ЧР
Составить кинематическую схему для
привода, состоящего из электродвигателя,
упругой муфты и червячного редуктора
17
18.
Кинематическая схема приводаХ
м
Составить кинематическую схему
для привода, состоящего из двигателя,
упругой муфты, цилиндрического
редуктора, цепной передачи и
приводного вала цепного транспортера
x
x
x
x
ЦР
Х
18
19.
Кинематическая схема приводаМ
ЦР
x
Привод, состоящий из двигателя,
упругой муфты, цилиндрического
редуктора и цепной передачи
x
19
20.
Кинематическая схема приводаМ
ЦР
X
X
Привод, состоящий из электродвигателя,
упругой муфты, цилиндрического
редуктора и клиноременной передачи
20
21.
Кинематическая схема приводаЗадание:
Составить кинематическую схему привода ленточного транспортера,
состоящего из электродвигателя, упругой муфты, коническоцилиндрического редуктора и клиноременной передачи
X
X
М
КЦР
21
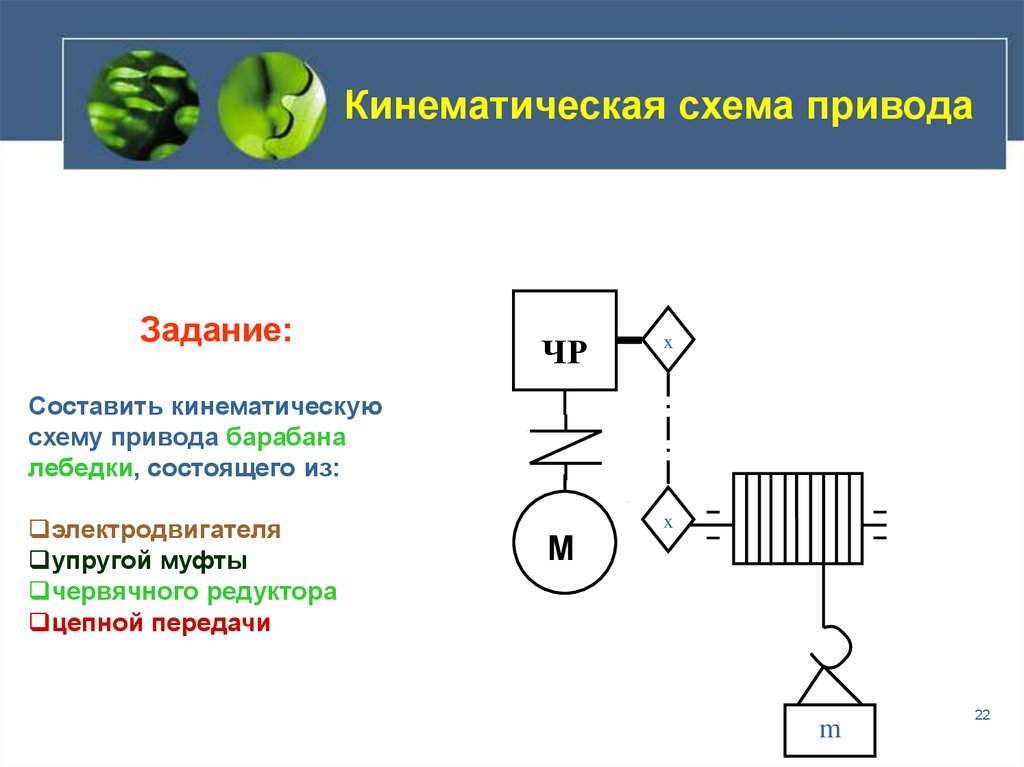
22.
Кинематическая схема приводаЗадание:
ЧР
x
Составить кинематическую
схему привода барабана
лебедки, состоящего из:
электродвигателя
упругой муфты
червячного редуктора
цепной передачи
М
x
m
22