








 pedagogy
pedagogy electronics
electronicsSimilar presentations:










Аттестационная работа. Создание автономного колёсного робота для свободного движения по ограниченной поверхности (стол, парта)
1. Аттестационная работа
АТТЕСТАЦИОННАЯ РАБОТАСлушателя курсов повышения квалификации по программе:
«Проектная и исследовательская деятельность как способ формирования
метапредметных результатов обучения в условиях реализации ФГОС»
Кожемяко Сергея Михайловича
Педагога ОДОД ГБОУ школы №595
Санкт-Петербурга
НА ТЕМУ: Методическая разработка по выполнению проектной работы
«Создание автономного колёсного робота для свободного движения
по ограниченной поверхности (стол, парта)», в рамках ДООП «Робототехника»
2. Краткая характеристика жанра работы
В качестве итоговой работы предлагается методическая разработкапо выполнению проектной работы «Создание автономного колёсного
робота для свободного движения по ограниченной поверхности (стол,
парта)».
Данная работа выполняется в рамках программы дополнительного
образования «Робототехника», после изучения раздела
«Электротехника с Arduino» и реализации проектной работы «Создание
робота для движения по линии».
3. Краткая характеристика образовательного учреждения
Государственное бюджетное общеобразовательное учреждениесредняя общеобразовательная школа №595 Приморского района
Санкт-Петербурга.
http://www.school595.ru/
Одним из структурных подразделений школы является
"Отделение дополнительного образования детей (ОДОД) "ИСТОК",
имеющее следующие направленности:
Физкультурноспортивная
Художественная
Социальнопедагогическая
Техническая
4. Цель работы
Развитие навыков УУД.Привитие инженерно-конструкторского мышления.
Умение использовать полученные знания и опыт.
Приобретение практического опыта в проектной деятельности.
Развитие мелкой моторики.
Цель работы для учащихся
Построение автономного колёсного робота, самопроизвольно
передвигающемуся по столу и избегающему падение со стола.
5.
Задачи работыГрафическое определение алгоритма движение при подъезде к
краю стола.
Определение расположения мотор-редукторов на основании колёсной
тележки.
Выбор датчиков для определения края стола, их оптимальное
расположение на тележке.
Сборка робота.
Создание программного кода для робота в Arduino IDE.
Доработка программного коа и конструкции в ходе практических
запусков робота.
Представление проекта с обоснованием выбора конструкции робота.
6.
Задачи работы для учащихся1. Проблема: избежать падение робота со стола.
2. Проектирование:
2.1 разработка алгоритмов действия робота при подъезде к краю стола;
2.2 разработка конструкции робота.
3. Поиск информации: подбор датчиков для определения края стола.
4. Продукт:
4.1 сборка робота;
4.2 написание программного кода для робота.
5. Презентация:
5.1 практическое представление робота;
5.2 устное обоснование выбора конструкции робота.
7. Основное содержание
Определение алгоритмов движения робота при подъезде к краю стола:2
STOP
3
4
1.
2.
3.
4.
Стоп
Отъезд назад
Разворот
Движение вперёд
Корректировка алгоритмов движения робота:
1. Стоп
2. Отъезд назад
3. Разворот – вправо/влево на 110÷160° для осуществления
произвольной траектории движения робота
4. Движение вперёд
8.
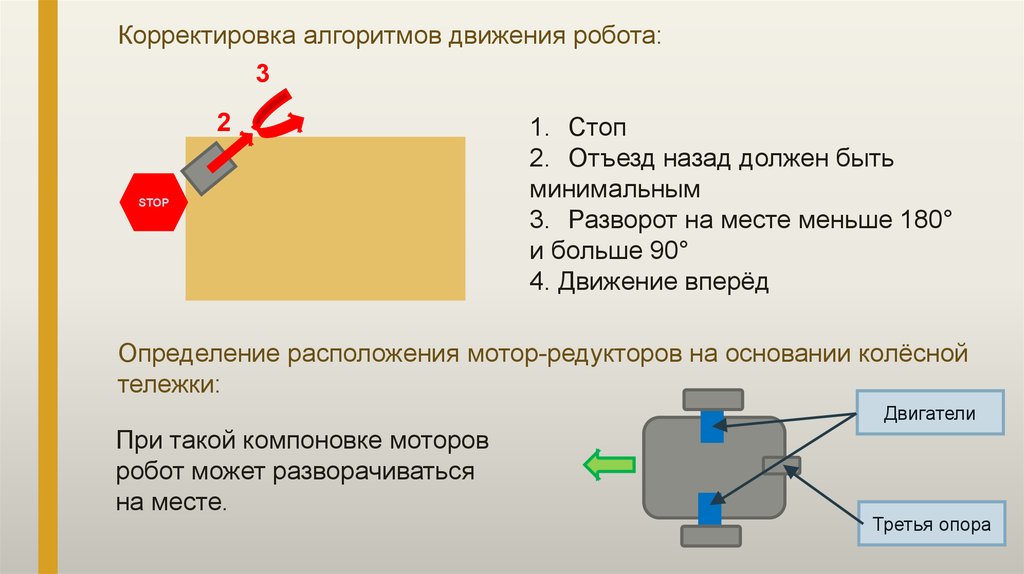
Корректировка алгоритмов движения робота:3
2
STOP
1. Стоп
2. Отъезд назад должен быть
минимальным
3. Разворот на месте меньше 180°
и больше 90°
4. Движение вперёд
Определение расположения мотор-редукторов на основании колёсной
тележки:
Двигатели
При такой компоновке моторов
робот может разворачиваться
на месте.
Третья опора
9.
Выбор датчиков для определения края столаИнфракрасный
датчик обнаружения
препятствий.
Фиксирует стол как
препятствие, отсутствие
стола – нет препятствия.
Инфракрасный
датчик линии.
Фиксирует стол как
определённый цвет, отсутствие
стола – нет цвета.
Инфракрасный датчик
отражения.
Фиксирует стол как
отражающую поверхность,
отсутствие стола – нет
отражающей поверхности.
10.
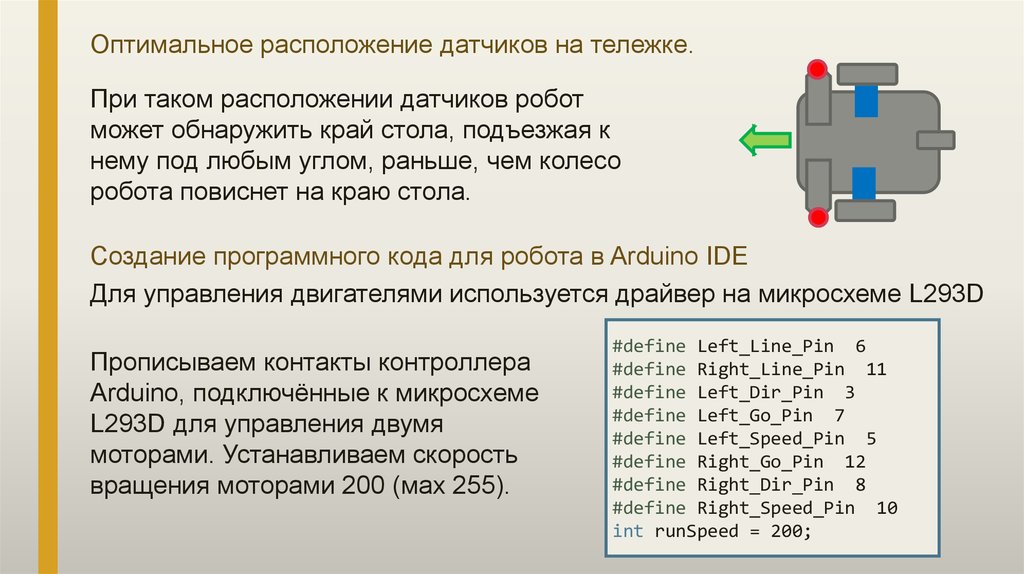
Оптимальное расположение датчиков на тележке.При таком расположении датчиков робот
может обнаружить край стола, подъезжая к
нему под любым углом, раньше, чем колесо
робота повиснет на краю стола.
Создание программного кода для робота в Arduino IDE
Для управления двигателями используется драйвер на микросхеме L293D
Прописываем контакты контроллера
Arduino, подключённые к микросхеме
L293D для управления двумя
моторами. Устанавливаем скорость
вращения моторами 200 (мах 255).
#define Left_Line_Pin 6
#define Right_Line_Pin 11
#define Left_Dir_Pin 3
#define Left_Go_Pin 7
#define Left_Speed_Pin 5
#define Right_Go_Pin 12
#define Right_Dir_Pin 8
#define Right_Speed_Pin 10
int runSpeed = 200;
11.
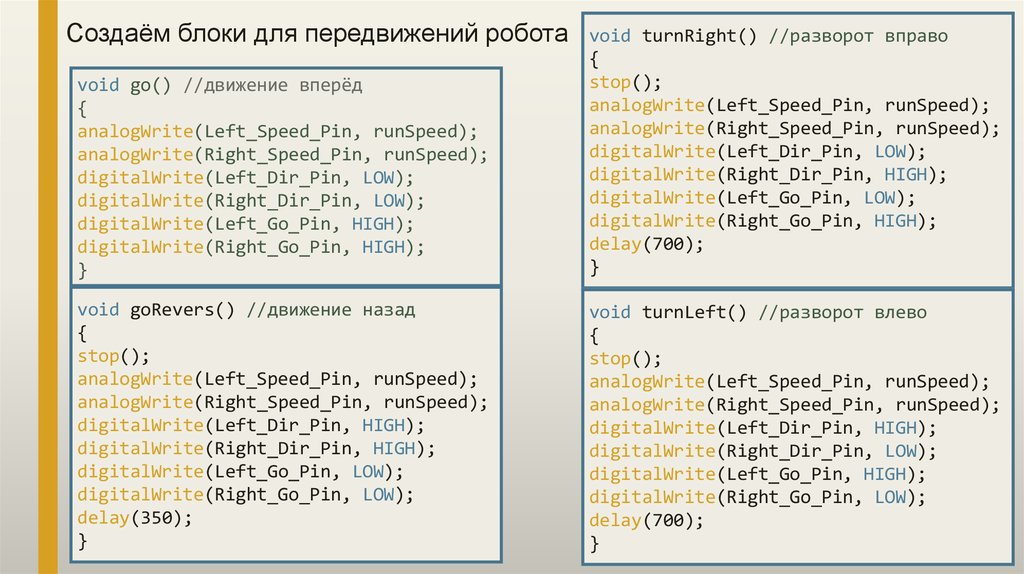
Создаём блоки для передвижений роботаvoid go() //движение вперёд
{
analogWrite(Left_Speed_Pin, runSpeed);
analogWrite(Right_Speed_Pin, runSpeed);
digitalWrite(Left_Dir_Pin, LOW);
digitalWrite(Right_Dir_Pin, LOW);
digitalWrite(Left_Go_Pin, HIGH);
digitalWrite(Right_Go_Pin, HIGH);
}
void turnRight() //разворот вправо
{
stop();
analogWrite(Left_Speed_Pin, runSpeed);
analogWrite(Right_Speed_Pin, runSpeed);
digitalWrite(Left_Dir_Pin, LOW);
digitalWrite(Right_Dir_Pin, HIGH);
digitalWrite(Left_Go_Pin, LOW);
digitalWrite(Right_Go_Pin, HIGH);
delay(700);
}
void goRevers() //движение назад
{
stop();
analogWrite(Left_Speed_Pin, runSpeed);
analogWrite(Right_Speed_Pin, runSpeed);
digitalWrite(Left_Dir_Pin, HIGH);
digitalWrite(Right_Dir_Pin, HIGH);
digitalWrite(Left_Go_Pin, LOW);
digitalWrite(Right_Go_Pin, LOW);
delay(350);
}
void turnLeft() //разворот влево
{
stop();
analogWrite(Left_Speed_Pin, runSpeed);
analogWrite(Right_Speed_Pin, runSpeed);
digitalWrite(Left_Dir_Pin, HIGH);
digitalWrite(Right_Dir_Pin, LOW);
digitalWrite(Left_Go_Pin, HIGH);
digitalWrite(Right_Go_Pin, LOW);
delay(700);
}
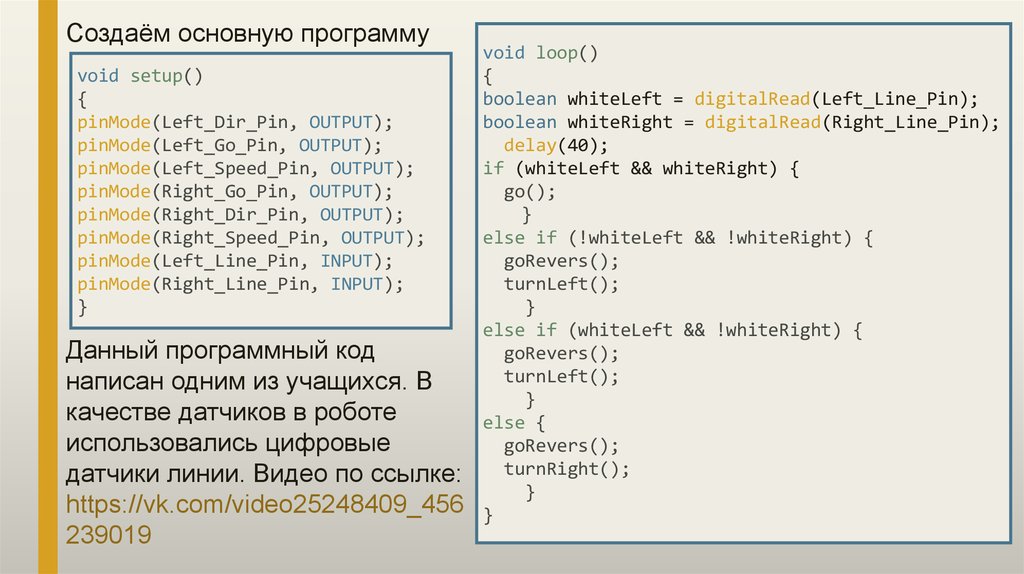
12.
Создаём основную программуvoid setup()
{
pinMode(Left_Dir_Pin, OUTPUT);
pinMode(Left_Go_Pin, OUTPUT);
pinMode(Left_Speed_Pin, OUTPUT);
pinMode(Right_Go_Pin, OUTPUT);
pinMode(Right_Dir_Pin, OUTPUT);
pinMode(Right_Speed_Pin, OUTPUT);
pinMode(Left_Line_Pin, INPUT);
pinMode(Right_Line_Pin, INPUT);
}
Данный программный код
написан одним из учащихся. В
качестве датчиков в роботе
использовались цифровые
датчики линии. Видео по ссылке:
https://vk.com/video25248409_456
239019
void loop()
{
boolean whiteLeft = digitalRead(Left_Line_Pin);
boolean whiteRight = digitalRead(Right_Line_Pin);
delay(40);
if (whiteLeft && whiteRight) {
go();
}
else if (!whiteLeft && !whiteRight) {
goRevers();
turnLeft();
}
else if (whiteLeft && !whiteRight) {
goRevers();
turnLeft();
}
else {
goRevers();
turnRight();
}
}
13. Методы диагностики образовательного результата
Соответствие результата поставленным целям и задачам.Осведомлённость в проблематике данной области.
Оптимальность программного кода.
Оригинальность решения.
14. Перспективы развития исследовательской и проектной деятельности
Методы проектов и исследовательских проектов лежат воснове разрабатываемых автором программ дополнительного
образования технической направленности. В процессе освоения
образовательных программ учащиеся осуществляют как
индивидуальные проекты, так и групповые. Хочется отметить, что
в рамках реализации проектов технической направленности
неизбежны исследовательские минипроекты.