










 electronics
electronicsSimilar presentations:










Создание робота для очищения солнечных батарей
1.
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
«ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
(ДГТУ)
Факультет Автоматизация, мехатроника и управление
Кафедра «Документоведение и языковая коммуникация»
Презентация по дисциплине
«Основы проектной деятельности»
на тему:
«Создание робота для очищения солнечных батарей»
Подготовили:
Алпатьева Екатерина
Здановская Евгения
2023
2.
Введение• Актуальность: солнечные панели
важнейший источник для получения
электроэнергии, который часто
подвергается загрязнениям. Их очищения
является непростым процессом. Поэтому
необходимо разработать робота для
бережной очистки.
• Цель: провести исследование, создать
модель робота для очистки солнечных
панелей, подобрать комплектующие.
3.
ЗадачиИзучить технические условия (габариты,
степень воздействия, массу)
Изучить типы загрязнений солнечных
батарей
Ознакомится с технологическими
процессами - мойки и очистки панелей
Создать модель, проработать
кинематику, систему управления
4.
Что загрязняет солнечные панели?• Солнечные панели могут загрязнять: пыль,
снег, капли воды и др. вещества, которые
мешают проникновению солнечных лучей
5.
Как влияет загрязнение на солнечные панели?• Исследователи из Индийского
технологического института Гандинагара
(IITGN), Университета Висконсина в
Мэдисоне и ученые Университета Дьюка
обнаружили, что накопление загрязнений
действительно влияет на конечный выход
солнечной энергии. Они измерили
снижение энергии от солнечных панелей
IITGN, поскольку они были наиболее
грязными.
• Китай, Индия и Аравийский полуостров
являются наиболее «пыльными» в мире.
Они все равно теряют от 17 до 25
процентов производства солнечной
энергии.
• Выходит, что загрязнение воздуха плохо
для здоровья, но и для солнечной
энергетики.
6.
Методы очистки солнечных панелей и ихминусы
Чистка шваброй с чистящим средством
вручную. Минусы такого метода:
• Необходимо нанимать сотрудника
• Процесс мойки занимает много времени
• Ресурсно-затратный вариант (нет
экономии воды, энергии)
7.
Анализ рынка и поиск аналоговИмпортный аналог
Scrobby.Функциональные
возможности Scrobby
Используется для мытья и очистки солнечных панелей,
расположенных под углом до 75 градусов, только один
Scrobby предназначен для очистки солнечной батареи
размером до 10 х 20 м (32,5 х 65 футов) - и это только
потому, что его провод, на котором он фиксируется,
простирается так далеко.
Умно, производители утверждают, что - после
установки - Scrobby не требует ни внешнего питания,
ни воды для работы, поскольку он собирает эти
ресурсы из окружающей среды. У него есть
солнечная панель для зарядки батарей, но умная
часть заключается в том, что на док-станции имеется
коллектор для сбора дождевой воды, что означает,
что он может быть действительно независимым и
автономным устройством.
8.
Проанализировав рынок, мы не обнаружили аналоговроссийского производства.
Заказывать роботов для очистки солнечных панелей из других
стран достаточно затратно,а иногда невозможно из-за санкций,
поэтому необходимо начать производить их в России.
Отечественное производство имеет множество плюсов:
–Цена ниже, чем у импортных роботов
–Нет необходимости тратить денежные средства на
транспортировку
–Возможность подстроиться под климатические условия
–Способствует развитию экономического сектора РФ
–Строгий контроль качества
–Привлечение инвестиций в отраслевую инфраструктуру
Поэтому выгоднее производить такого робота у нас в стране, чем
везти из за рубежа
9.
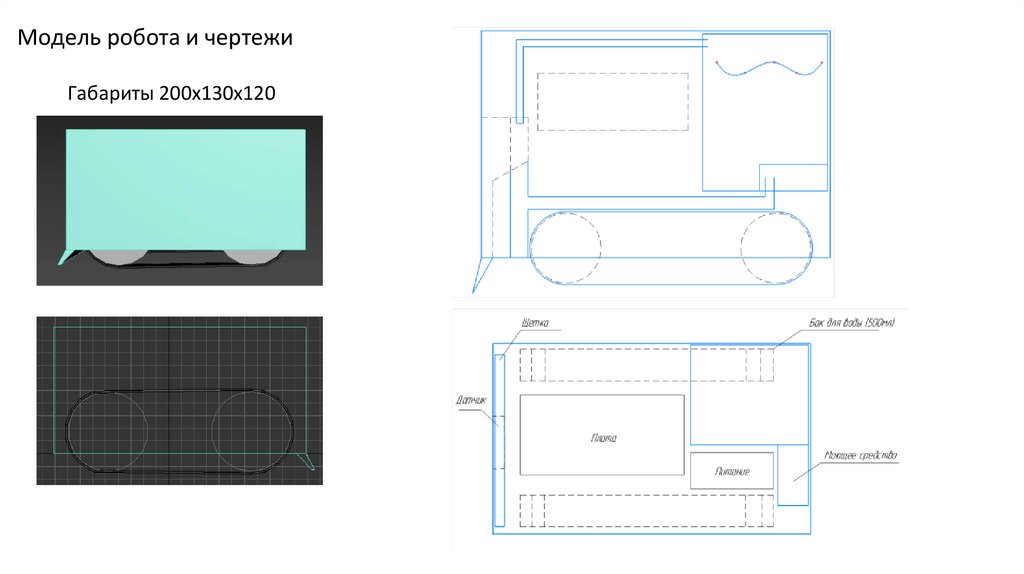
Модель робота и чертежиГабариты 200х130х120
10.
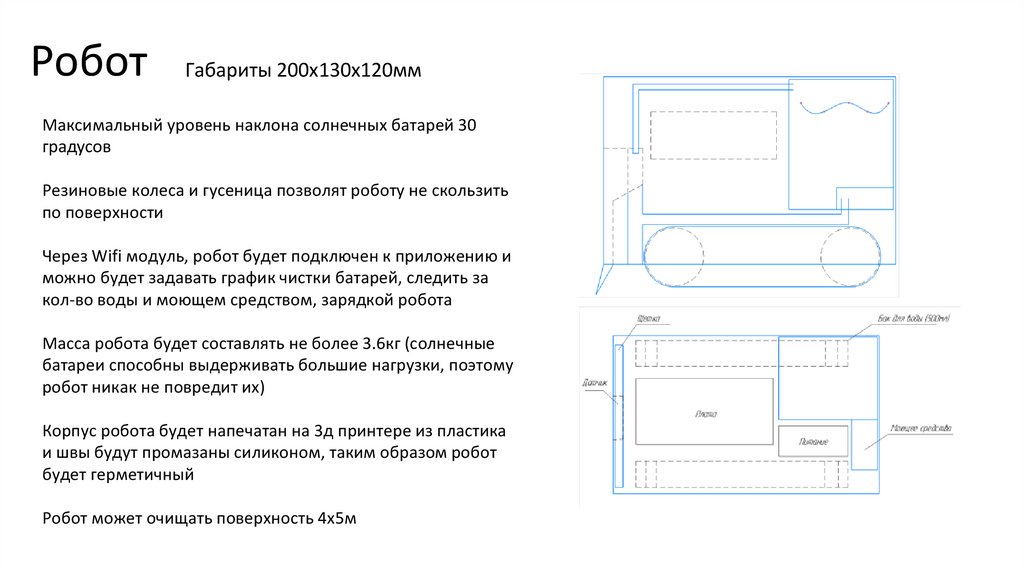
РоботГабариты 200х130х120мм
Максимальный уровень наклона солнечных батарей 30
градусов
Резиновые колеса и гусеница позволят роботу не скользить
по поверхности
Через Wifi модуль, робот будет подключен к приложению и
можно будет задавать график чистки батарей, следить за
кол-во воды и моющем средством, зарядкой робота
Масса робота будет составлять не более 3.6кг (солнечные
батареи способны выдерживать большие нагрузки, поэтому
робот никак не повредит их)
Корпус робота будет напечатан на 3д принтере из пластика
и швы будут промазаны силиконом, таким образом робот
будет герметичный
Робот может очищать поверхность 4х5м
11.
Плата esp32 с Wifi модулем12.
Необходимые комплектующиеШаговый двигатель 17HS4401S
Сопротивление фазы: 1.5 Ом
Крутящий момент: 5.5 кг x см
Момент удержания: 2.8 кг х см
Индуктивность: 2.8 мГн;
Длинна вала: 24мм
Угловой шаг: 1.8° ±5% (200 шагов на оборот)
Макс. ток обмотки: 1.7 А
Диаметр вала: 5 мм
Масса: 0,3кг
13.
Brushless DC Motor with Encoder 12V 159RPMРабочее напряжение: 12 В
Максимальный ток: 0,7 А
Скорость вращения ротора двигателя: 7100 – 7300 об/мин
Момент блокировки вала: 2,4 кг * см
Скорость вращения вала редуктора: около 159 об/мин
Передаточное отношение: 45:1
Разрешение энкодера: 6*45
Режимы управления: ШИМ, прямое управление, управления с
учетом обратной связи
Вес: 0.9кг
14.
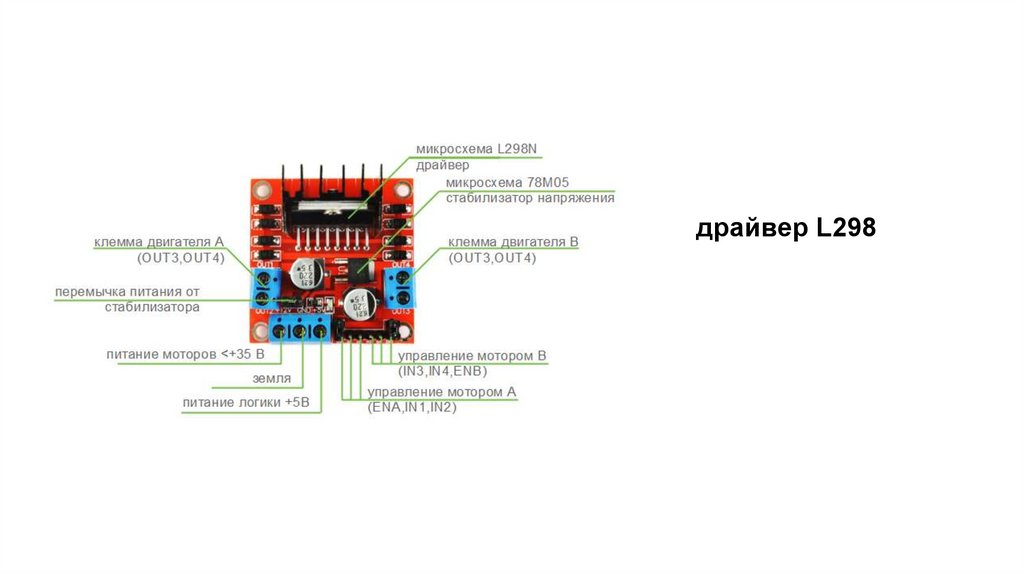
драйвер L29815.
Сервопривод Unidrive SP16.
Датчик освещенности ARDUINOМодуль аналогового датчика света на основе
фоторезистора. Датчик имеет два управляющих
выхода – аналоговый, значение пропорционально
интенсивности освещения, и цифровой, выдающий 0
или 1. Величина освещения, при которой происходит
срабатывание датчика, регулируется потенциометром.
17.
Ультразвуковой дальномер HC-SR04Этот дальномер может служить прекрасным
датчиком для робота, благодаря которому он
сможет определять расстояния до объектов,
объезжать препятствия. Его можно также
использовать в качестве датчика для
сигнализации, срабатывающего при приближении
объектов.
18.
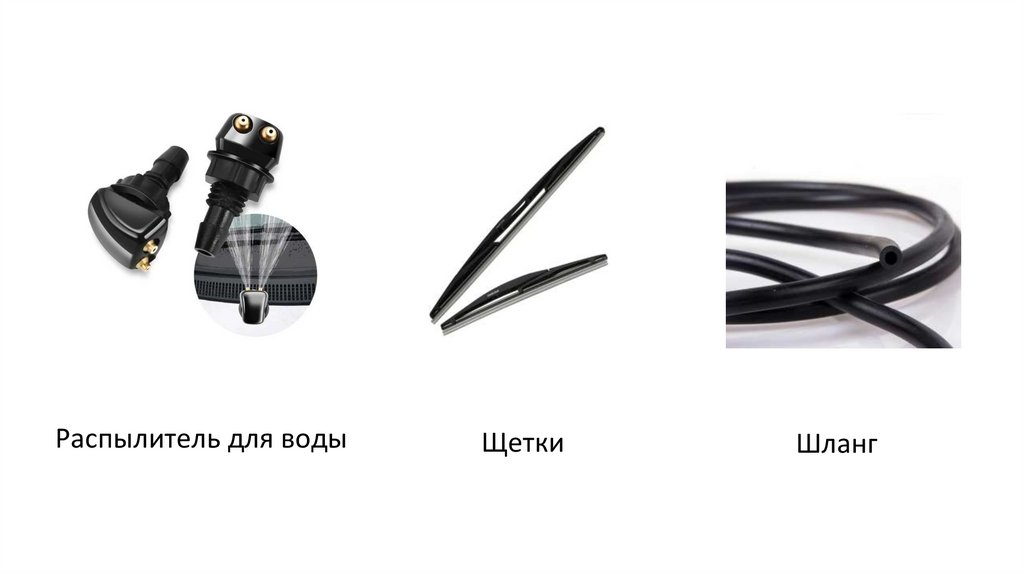
Распылитель для водыЩетки
Шланг
19.
Батарея 2v 2800mah Tamiya Plug20.
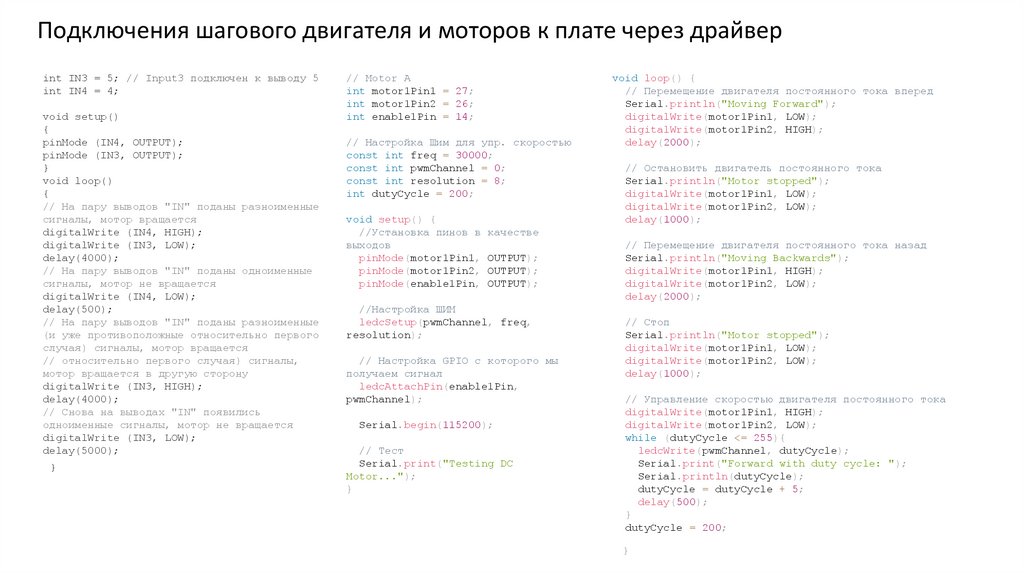
Подключения шагового двигателя и моторов к плате через драйверint IN3 = 5; // Input3 подключен к выводу 5
int IN4 = 4;
void setup()
{
pinMode (IN4, OUTPUT);
pinMode (IN3, OUTPUT);
}
void loop()
{
// На пару выводов "IN" поданы разноименные
сигналы, мотор вращается
digitalWrite (IN4, HIGH);
digitalWrite (IN3, LOW);
delay(4000);
// На пару выводов "IN" поданы одноименные
сигналы, мотор не вращается
digitalWrite (IN4, LOW);
delay(500);
// На пару выводов "IN" поданы разноименные
(и уже противоположные относительно первого
случая) сигналы, мотор вращается
// относительно первого случая) сигналы,
мотор вращается в другую сторону
digitalWrite (IN3, HIGH);
delay(4000);
// Снова на выводах "IN" появились
одноименные сигналы, мотор не вращается
digitalWrite (IN3, LOW);
delay(5000);
}
// Motor A
int motor1Pin1 = 27;
int motor1Pin2 = 26;
int enable1Pin = 14;
// Настройка Шим для упр. скоростью
const int freq = 30000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 200;
void setup() {
//Установка пинов в качестве
выходов
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
//Настройка ШИМ
ledcSetup(pwmChannel, freq,
resolution);
// Настройка GPIO с которого мы
получаем сигнал
ledcAttachPin(enable1Pin,
pwmChannel);
Serial.begin(115200);
// Тест
Serial.print("Testing DC
Motor...");
}
void loop() {
// Перемещение двигателя постоянного тока вперед
Serial.println("Moving Forward");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
delay(2000);
// Остановить двигатель постоянного тока
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
// Перемещение двигателя постоянного тока назад
Serial.println("Moving Backwards");
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
delay(2000);
// Стоп
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
// Управление скоростью двигателя постоянного тока
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
while (dutyCycle <= 255){
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Forward with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle + 5;
delay(500);
}
dutyCycle = 200;
}
21.
Плюсы такого роботаБезопасен для панелей
Очищает поверхность
Возможность удаленно
управлять роботом
Экономия воды
Способствует развитию
технологий в России
22.
Заключение• В ходе работы узнали, что солнечные
панели играют огромную роль в жизни
людей. Но они загрязняются, а это
мешает проникновению солнечных
лучей. Помыть водой в ручную-не
лучший вариант. Поэтому мы
разработали проект робота, который
бережно очистит солнечные панели.
• В России сейчас нужны отечественные
разработки и данный робот будет
отличным технологическим
устройством